簡易船舶GPS、艏向顯示器的設計
2014-06-13 07:54:24陳隱宏樓然苗
浙江海洋大學學報(自然科學版) 2014年6期
陳隱宏, 樓然苗
(浙江海洋學院船舶與海洋工程學院, 浙江舟山, 316022)
船舶航行時的艏向、航速、地理位置(經度、緯度等)、時間等是船舶安全航行的必要信息。目前市場上,一套進口的羅經導航設備多達數十萬元,只有大型船舶上才配有這樣的裝備。而設計一套簡易的GPS、電子羅經導航儀價格在1 000元以下,具有實時的艏向、航速、地理位置(經度、緯度)、時間等信息顯示功能,可在小型漁貨輪船上大量推廣應用,為船舶安全航行提供輔助幫助[1-10]。
1 硬件電路設計
簡易船舶GPS、艏向顯示器的硬件原理框圖如圖1所示。整個系統由主控制器、電子羅經傳感器、GPS模塊、4.3寸TFT液晶顯示屏、電源穩壓模塊組成。
1.1 電子羅經傳感器硬件系統組成
電子羅經傳感器硬件系統框圖如圖2所示。電子羅經傳感器由微處理器芯片、LSM303DLH地磁傳感器芯片、RS485接口電路、三位LED數碼管和電源變換器組成。
1.1.1 微處理器電路
電子羅經傳感器的微處理器芯片使用宏晶公司生產的STC12LE5608AD單片機,采用32腳的方形貼片封裝形式(LQFP-32)。主要引腳資源使用如圖3,分別為:P1.0-P1.6口用于輸出LED數碼管的段碼;P2.0、P0.2、P3.7口用于三位LED數碼管的位選;串行口P3.1、P3.2與RS485接口電路相連,用于輸出航向角信息;P2.5、P2.6、P2.7口與地磁傳感器LSM303DLH的相應端口連接,P3.4、P3.5口分別接一個按鍵開關,用于功能設定與校正;P0.0口用于RS485芯片的使能控制。
1.1.2 地磁傳感器芯片
地磁傳感器芯片使用意法半導體公司生產的LSM303DLH芯片。LSM303DLH芯片可將連續的地磁場信號轉化為離散的數字信號。LSM303DLH芯片的測量分辨率較高,其最高分辨率可達8 mGs,測量范圍從1.3~8.1 Gs,可由程序設置選擇。在通信方面,LSM303DLH采用I2C總線與微處理器進行通信,具有占用接口少,通信速率較高的優點。
1.1.3 RS485接口電路
RS485接口電路采用SP3485EN芯片。SP3485EN一種低功耗半雙工電平轉換芯片,完全符合RS485串行協議的要求。當需要發送數據時,將SP3485EN輸出使能端TE置1,而需要接收數據時,將使能端TE置為低電平。
1.1.4 LED顯示電路
電子羅經傳感器的LED顯示電路由三位七段發光二極管組成。由于單片機的輸出電壓、輸出電流都很微弱,所以還需要加上拉電阻才能點亮發光二極管,電路設計中采用10 K的上拉電阻。此外,流過發光二極管的電流需要限定,否則發光二極管將被燒壞,電路設計中采用1 K的排阻。LED顯示電路如圖4所示。
1.1.5 電源變換電路
電子羅經傳感器工作時需要兩種不同的穩定電壓,為此,電源變換電路采用兩級穩壓電路,由LM1117I-3.3和LM1117I-1.8級聯完成。直流輸入電壓范圍為5~15 V,第一級直流電壓輸出3.3 V,第二級直流電壓輸出1.8 V。電源變換電路如圖5所示。
1.2 GPS模塊
GPS模塊采用型號為REB3571LP的成品接收頭。REB3571LP是臺灣鼎天最新推出的SiRF Star III方案模塊,接收性能極佳,可廣泛用于車載導航和車輛監控安防等領域。其工作電壓為3.3 V,工作溫度-30℃~+85℃,熱啟動約1 s,溫啟動約35 s,冷啟動約42 s,定位準確度:10 m(不帶SA),輸出信息格式滿足NMEA0183,輸出接口標準為RS232。
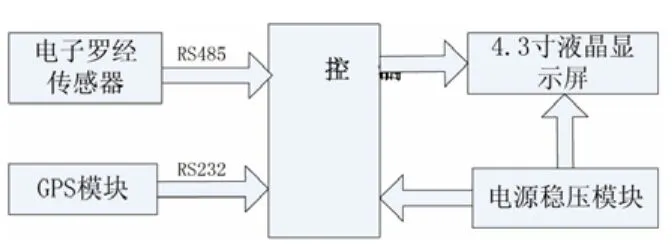
圖1 船舶GPS、艏向顯示器硬件系統框圖Fig.1 Main display hardware system block diagram
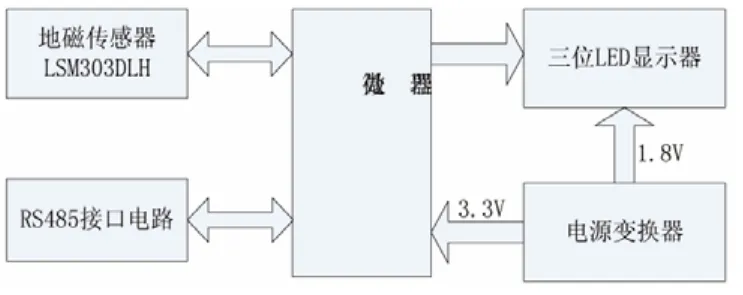
圖2 電子羅經傳感器硬件系統框圖Fig.2 The hardware diagram of electronic compass
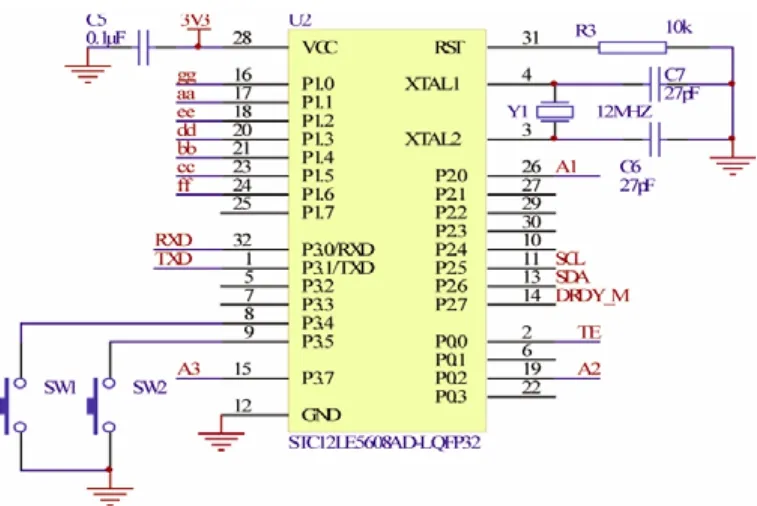
圖3 微處理器硬件電路圖Fig.3 Circuit diagram of micro controller

圖4 LED顯示電路硬件電路圖Fig.4 Circuit diagram of LED display

圖5 電源變換電路Fig.5 Circuit diagram of power transformation
1.3 主控制器電路
主控制器芯片使用宏晶公司生產的STC12C5A60S2單片機,采用44腳的方形貼片封裝形式(LQFP-44)。主控制器的端口資源使用情況如圖6所示:單片機的兩組串行口(P3.0/P3.1、P1.2/P1.3)分別用于接收電子羅經傳感器測得的艏向角信息和GPS模塊測得的地理位置信息。P1.0,P1.1,P1.4,P1.5口以SPI總線方式與TFT液晶顯示屏進行連接,P1.6口用于檢測SPI總線是否忙。
1.4 主顯示屏
主顯示屏采用深圳彩晶科技有限公司生產的4.3寸16位真彩色液晶屏CJT04301,該屏支持文字及繪圖兩種混合顯示模式,內帶768KB的DDRAM,色彩深度65K色,支持SPI、I2C、并口等接口,支持外部串行式Flash/ROM接口,支持文字旋轉及放大功能,完全能滿足設計要求的信息顯示功能。
1.5 電源穩壓模塊
電源穩壓模塊分別為主控制器和TFT液晶顯示屏提供穩定的直流電壓。電源穩壓芯片采用LM2576S5.0芯片。直流輸入電壓范圍8~40 V,直流輸出電壓為5 V。

圖6 主控制器硬件電路圖Fig.6 Circuit diagram of main controller
2 程序設計
簡易船舶GPS、艏向顯示器的控制程序包括電子羅經傳感器的控制程序和主顯示屏的控制程序。
2.1 電子羅經傳感器控制程序
電子羅經傳感器的主要控制程序有:初始化程序、磁場數據讀出與處理程序、輸出信息格式控制程序、艏向角LED顯示程序、干擾校正程序。
2.1.1 初始化程序
初始化程序的主要工作是:給一些變量單元賦初值、初始化LSM303DLH芯片的I2C總線、設定LSM303DLH芯片的工作參數、開啟定時器中斷、串口中斷、設定串行口波特率等。
2.1.2 磁場數據讀出與處理程序
磁場數據讀出與處理程序的主要作用是:通過微處理器讀LSM303DLH測得的磁場數據,然后再計算出磁北航偏角。在程序設計中,LSM303DLH芯片設定成最快的轉換速度,微處理器則連續讀取10個數據。在計算磁北航偏角時,采用取多個數據求平均值的方法。對讀取到的數據中個別相差較大的數據予以丟棄,以提高求得數據的精確性。由于船舶在航行時轉向緩慢,因此數據輸出的刷新率不必過高,波特率一般為4 800 Baud/s。當需要提高數據輸出刷新率時,可通過按鍵開關選擇。
2.1.3 輸出信息格式控制程序
電子羅經傳感器通過RS485串口向主顯示屏發送數據,其輸出信息的語句格式滿足IEC-61162-1標準。IEC-61162-1協議對船載自動導航設備(AIS)的信息采集和處理進行了規范化的說明。語句的標準格式為“$+標志字符5個+逗號+數據整數位字符3個+小數點+小數位字符1個+逗號+M標識字符1個+*號+校驗碼字符2個+退格回車符2個”,共19個ASCⅡ碼。如“$HCHDM,108.1,M*21”。其中第一個逗號和第二個逗號之間的數據才是航向角信息,此處艏向角為偏北108.1°。
2.1.4 艏向角LED顯示程序
艏向角LED顯示程序采用定時器自動中斷的動態掃描方法。當需要改變三位LED的發光亮度時,只需要改變定時器的計數初值,即通過改變動態掃描的周期時間。
2.1.5 干擾校正程序
在使用電子羅經傳感器時,周圍環境中可能存在一定的干擾,從而影響測得數據的準確性。因此,在第一次使用電子羅經傳感器時,要把測得磁場數據的最大值和最小值存儲在EEPROM中。這樣,在以后的使用中干擾校正程序就會把當前電子羅經傳感器測得的磁場數據與存儲在EEPROM中的數據進行等比對換,從而準確求出船艏與磁北方向角的大小,提高數據的精確度。
2.2 主顯示屏的控制程序
主顯示屏的控制程序主要有:初始化程序、電子羅經傳感器信息接收與處理程序、GPS信息接收與處理程序、顯示程序等。
2.2.1 初始化程序
初始化程序的主要工作是:定義變量及標志位,給一些變量、數組單元賦初值,初始化TFT液晶顯示屏,開啟定時器中斷,串口中斷,設定定時器工作參數,設定串行口波特率等。
2.2.2 電子羅經傳感器信息接收與處理程序
電子羅經傳感器的信息接收選擇串口中斷方法。由于主控制器接收到的是IEC-61162-1格式的信息,如“$HCHDM,108.1,M*29”,其中108.1才是艏向角信息,所以信息處理程序要將其中的艏向角信息提取出來,并發送給顯示屏顯示。
2.2.3 GPS信息接收與處理程序
GPS信息的接收也通過串口中斷方法。GPS通訊格式遵守NMEA0183協定。如接收到的GPS信息為“$GPRMC,002654.000,A,2956.9456,N,12219.2747,E,005.2,024.8,220902,E,W*68”。其中,“$”是語句起始位,后面的信息用逗號分割,依次表示:UTC時間,定位狀態,緯度,南北半球,經度,東西半球,地面速率,地面航向,UTC日期,磁偏角(000.0-180.0度),磁偏角(E表示偏東,W表示偏西),模式指示。GPS信息處理程序需要對UTC時間、UTC日期、經度、緯度、磁偏角大小、磁偏角方向進行轉換處理,最后發送給主顯示屏顯示。
2.2.4 顯示程序
CJT04301TFT液晶顯示屏的顯示程序包括:工作窗口及卷動窗口設定程序、清內存程序、圖片顯示程序、文字顯示程序、畫圖程序(線、面、圓、三角形、矩形等)。
3 測試與性能分析
經測試,簡易船舶GPS、艏向顯示器的主要技術指標為:
(1)電源電壓:9~30 V直流輸入;
(2)電源電流:9 V輸入下小于250 mA;
(3)信號接口標準:RS-485、RS232;
(4)信息格式:符合IEC-61162-1(NMEA0183兼容)國際標準;
(5)串口波特率:4 800 baud/s(可選);
(6)艏向分辨率:0.1度;
(7)顯示屏:4.3寸(480×272)TFT液晶真彩屏。
4 結論
簡易船舶GPS艏向顯示器具有實時的艏向、航速、地理位置(經度、緯度)、時間等信息顯示功能,具有低價實用等特點,在小型漁貨船上具有較大的推廣應用市場。
[1] 樓然苗, 胡佳文. 基于LSM303DLH的電子羅經傳感器設計[J]. 浙江海洋學院學報: 自然科學版, 2012, 31(5): 454-457.
[2] 王賢恩, 樓然苗, 胡佳文. 基于電子羅經的船舶艏向發送器設計[J]. 科技通報, 2014, 30(3): 87-116.
[3] 龔瑩瑩, 曾連蓀. 艏向數字顯示器的設計[J]. 電子技術, 2004(4): 11-13.
[4] 王麗穎, 支 煒, 孫紅霞, 等. 基于HMC1022磁阻傳感器的數字電子羅盤的設計與實現[J]. 電子測量技術, 2009, 32(1):108-111.
[5] 李希勝, 劉洪毅, 郭曉霞, 等. 車用磁電子羅盤的研制[J]. 微計算機信息, 2006, 22(10-1): 308-310.
[6]馮桂蘭, 田維堅, 葛 偉, 等. 數字電子羅經系統的設計[J]. 測控技術, 2006, 25(8): 86-88
[7]楊新勇, 黃圣國. 磁羅盤的羅差分析與驗證[J]. 電子科技大學學報, 2004, 33(5): 547- 550.
[8]熊 劍, 劉建業, 孫永榮, 等. 數字磁羅盤的研制[J]. 傳感器技術, 2004, 23(8): 47-48.
[9]郝振海, 黃圣國. 基于差分磁羅盤的組合艏向系統[J]. 北京航空航天大學學報, 2008, 34(4): 377-380.
[10]張 靜, 金志華, 田蔚風. 無艏向基準時數字式磁羅盤的自差校正[J]. 上海交通大學學報, 2004, 38(10): 1 757-1 760.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中華手工(2017年2期)2017-06-06 23:00:31
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00
