“海洋石油278”動力定位系統升級后推進器艙布置方案設計
2014-06-27 02:27:46,,
船海工程 2014年2期
關鍵詞:設備
,,
(海洋石油工程股份有限公司,天津 300451)
“海洋石油278”是目前世界上第一艘帶有動力定位2級能力的5萬t半潛式自航工程船,半潛深度13.5 m,在所有吃水下均具有DP-2動力定位能力。該船為CCS船籍,無限航區。設計吃水10.15 m的情況下,載重量約53 500 t ,在靜水中的航速能達到14 kn。續航力約15 000 n mile,自持力不少于50 d。主要用于但不限于海洋石油和天然氣勘探、開采工程裝備等海上運輸和安裝。
DP-2動力定位系統是該半潛式自航工程船的關鍵技術之一,具有高技術、高復雜性的特點。DP-2系統是一個雙冗余的動力定位系統,系統設計滿足CCS DP-2、ABS DP-2以及IMO DPII 的要求,入級檢驗按照CCS DP-2規范。
為提高船舶的動力定位能力,“海洋石油278”需從當前的DP-2動力定位系統升級為DP-3。
1 動力定位系統的設備配置要求
船級符號是船級社授于船舶的一個等級標志,對于動力定位系統來說,各船級社根據船東對動力定位系統的功能和設備冗余度的不同要求授于不同的附加標志。不同的動力定位附加標志, 其要求的設備配置也不同,主要區別在設備配置的冗余度上。表1列出了動力定位系統設備配置的要求 (以CCS要求為例,其他船級社要求相似,不再列舉)。

表1 不同等級動力定位系統的配置
由表1可見, 不同級別的動力定位系統對于設備的配備和布置要求區別較大。 概括如下。
1)DP-1的附加標志。不考慮系統設計的冗余,僅考慮自動保持船位和艏向即可。
2)DP-2的附加標志。相對于 DP-1來說,除了考慮自動保持船位和艏向,還需考慮設備的冗余,不應因為單點故障使得動力定位系統失效。
3)DP-3的附加標志。要求相對較高, 相對于DP-2來說,除了考慮設備的冗余,冗余的設備之間需用 A60防火墻進行分隔。
對于動力定位系統推進器的配置要求,DP-2與DP-3附加標志的主要區別在于考慮冗余的推進器艙室之間是否有A60防火墻進行分隔。這也是“海洋石油278”船從DP-2動力定位系統升級為DP-3過程中推進器艙設計的最關鍵要素。
2 推進系統的配置分析
本船在船艉安裝有兩套5 500 kW變頻調速異步電動機驅動的推進軸系,用于主推進及動力定位,在船艉還安裝有兩臺2 000 kW管道推進器。在船艏安裝有兩臺2 000 kW可伸縮全回轉電力推進器,還安裝有一臺2 000 kW管道推進器,用于港口操作和動力定位。推進器的布置見圖1。
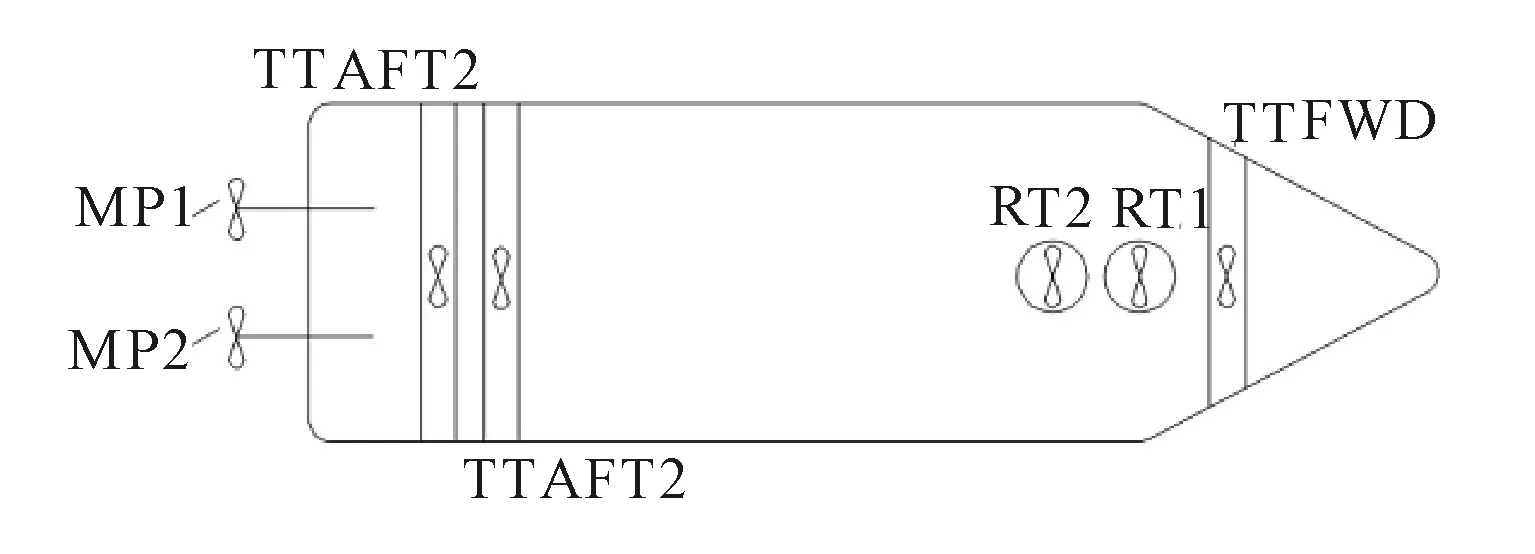
圖1 “海洋石油278”推進器的布置示意
所有全回轉推進器應在任何方向均可產生最大推力,管道推進器需要在兩個方向產生最大推力。
全船7臺推進器可在下述情況下連續工作。
1)兩臺5 500 kW主推進器可單機或雙機運行。
2)主推進器、可伸縮推進器、管道推進器可任意組合運行。
本船設有兩套推進軸系、固定螺距螺旋槳、減速齒輪箱、導流管和舵。每臺螺旋槳由推進電機通過減速齒輪箱驅動,推進電機轉速受控于變頻器系統。
對于推進控制方面,為每套軸系提供獨立的控制系統。推進控制系統設計時要考慮動力定位和航行模式。
推進系統的動力定位模式包括以下控制。
1)主推進器和舵。
2)船艉側推。
3)船艏側推。
4)船艏可伸縮推進器。
航行模式包括如下3種。
1)正反轉控制。
2)電機速度控制。
3)電機功率極限控制。
2.1 管道式推進器
3臺管道式推進器為定距式螺旋槳,推進器由電機驅動,通過變頻器雙轉向由0速至全速無級控制。槳葉優化設計,滿足雙向大推力要求。
管道式推進器的主要參數見表2,推進器艙布置圖見圖2。

表2 管道式推進器的主要參數
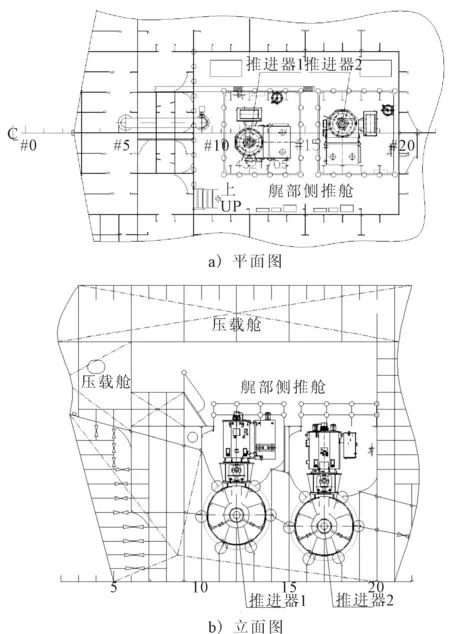
圖2 管道式推進器艙室布置示意
2.2 伸縮式全回轉推進器
兩臺伸縮式全方位回轉推進器為定螺距螺旋槳,推進器由電機驅動,通過變頻器單轉向由0速至全速無級控制。槳葉優化設計,滿足單向大推力要求。推進器為無級控制轉速,最小轉速為2 r/min。
伸縮式全回轉推進器的主要參數見表3,推進器艙布置圖見圖3。

圖3 伸縮式全回轉推進器艙室布置示意
表3 伸縮式全回轉推進器的主要參數
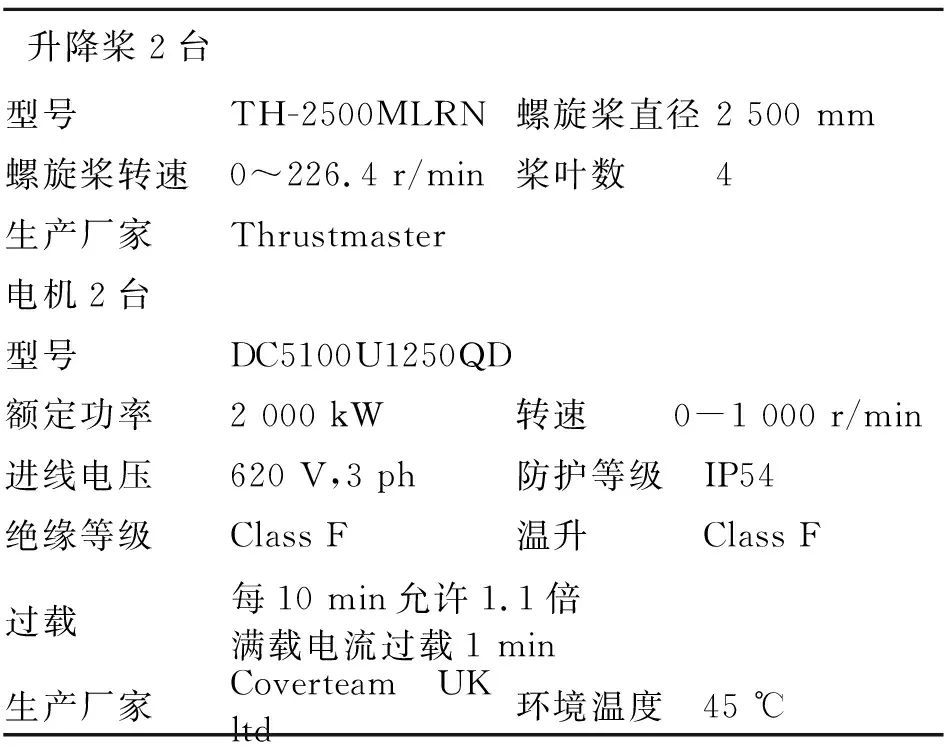
升降槳2臺型號TH-2500MLRN螺旋槳直徑 2 500 mm螺旋槳轉速0~226.4 r/min槳葉數 4生產廠家Thrustmaster電機2臺型號DC5100U1250QD額定功率2 000 kW轉速0-1 000 r/min進線電壓620 V,3 ph防護等級 IP54絕緣等級Class F溫升 Class F過載每10 min允許1.1倍滿載電流過載1 min生產廠家Coverteam UK ltd環境溫度 45 ℃
2.3 主推進器
兩臺主推進器為定距式螺旋槳;推進器由電機驅動,通過變頻器雙轉向由0速至全速無級控制。槳葉優化設計,滿足雙向大推力要求。
主推進器的主要參數見表4,推進器艙布置見圖4。
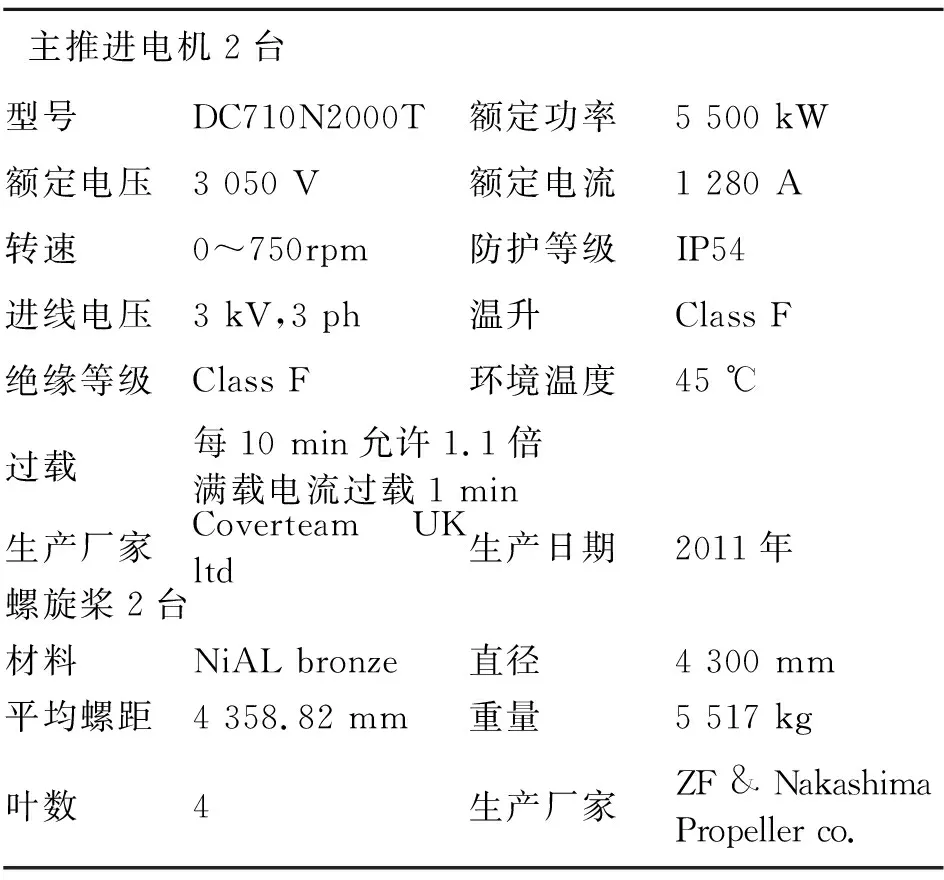
表4 2臺主推進器的主要參數
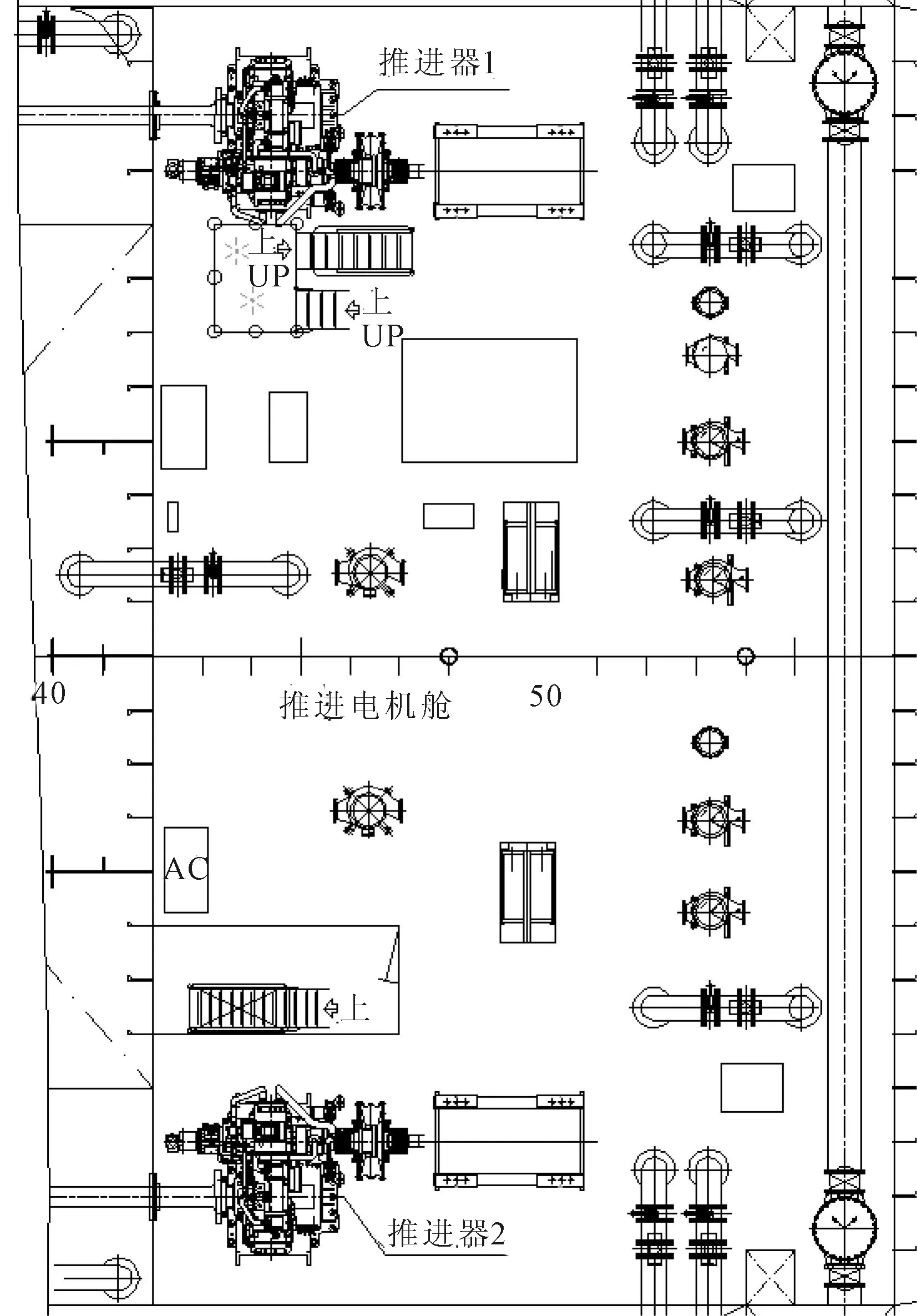
圖4 主推進器艙室布置示意
由各個推進艙的布置圖可知,每一艙室內的兩臺推進器都配置了獨立的附屬設備,使得某一附屬設備的失效不會同時導致兩臺推進器失效。本船的推進系統具有滿足DP-2要求的冗余能力,推進器的配置滿足在單點故障情況下,船舶浮起及半潛狀態在相應環境條件下的定位能力。但船艏或船艉的兩個推進器及附屬設備都布置在同一個艙室內,不能滿足DP-3動力定位的要求,需要對推進器艙的分艙布置進行調整。
3 推進器艙的布置方案設計
根據表1中船級社對于DP-3系統的冗余設計要求,本船從DP-2動力定位系統升級為DP-3后,推進器艙的布置要考慮推進器及附屬設備在位置上獨立,即要求兩個推進系統之間設置A60的防火墻進行阻隔,以確保在發生電力故障、火災、水災等情況下的損失不會超過一個推進器。
因此,對推進器附屬設備的艙室布置進行重新規劃,目的是將每一套推進器裝置及附屬系統放置在一個單獨的艙室內。規劃后的推進器艙室布置見圖5~7,圖中云霧線內表示的為推進器附屬設備的布置調整和新增加的艙壁結構,以滿足DP-3系統對推進器艙室的分艙布置要求。
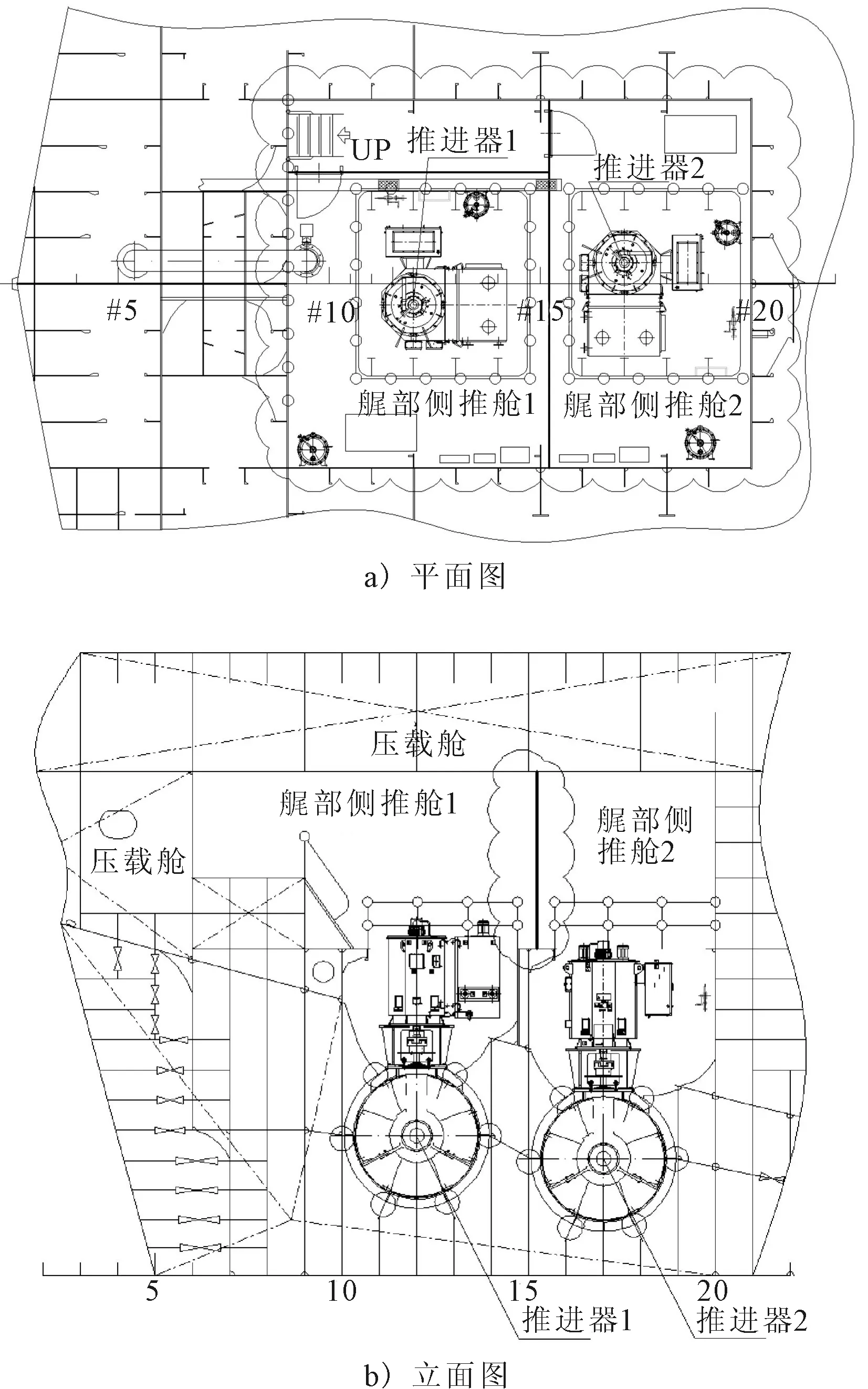
圖5 管道式推進器艙室分艙布置示意

圖6 伸縮式全回轉推進器艙室分艙布置示意
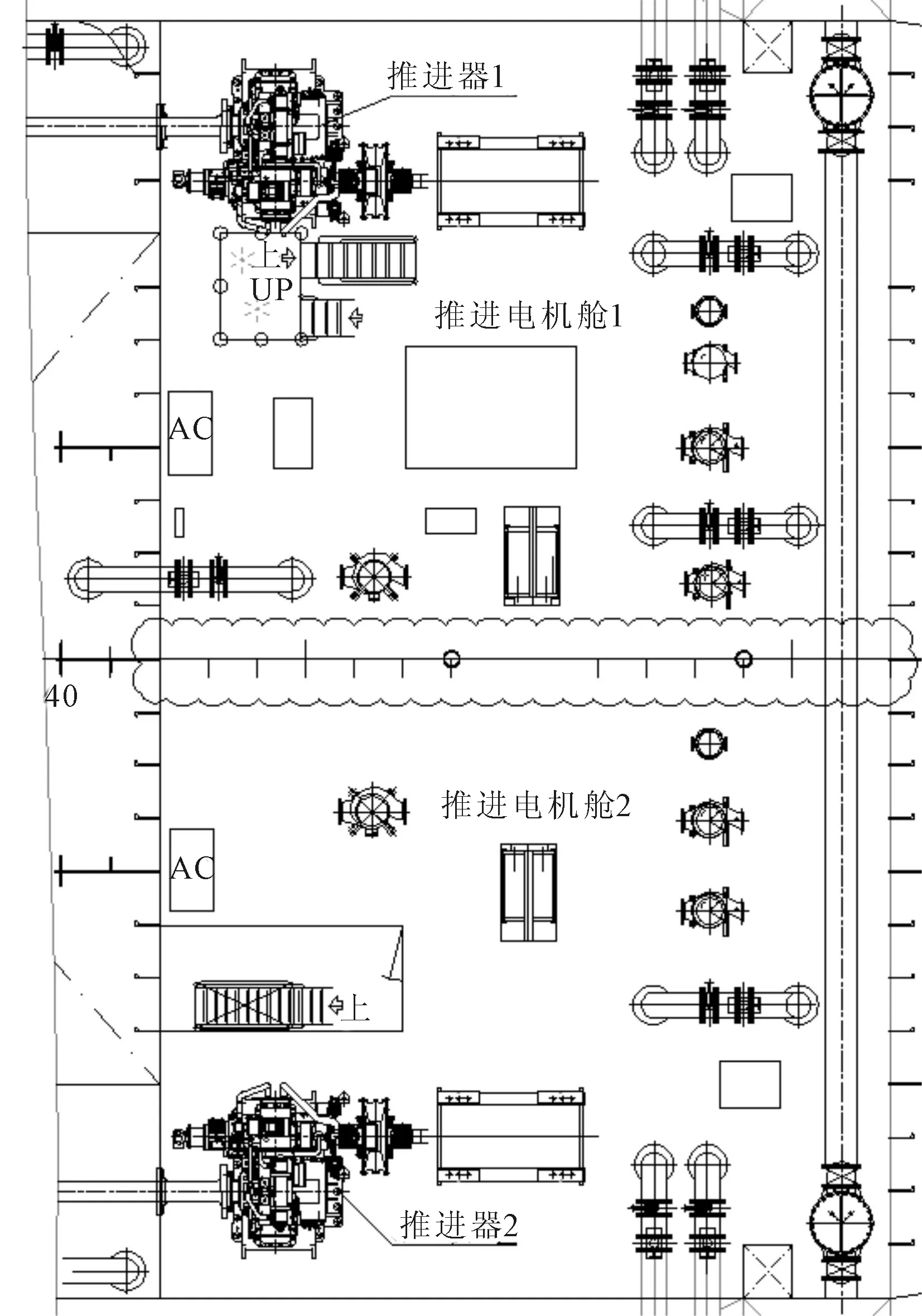
圖7 主推進器艙室分艙布置示意
4 結束語
根據船級社動力定位附加標志DP-3的要求,冗余的推進器艙室之間應設置有A60防火墻進行分隔。“海洋石油278”船從原有的DP-2動力定位系統升級為DP-3后,在維持原船推進器配置方案不變的前提下,在冗余的推進器艙室之間設置A60防火墻的同時調整了艙內設備的布置,滿足了DP-3動力定位系統對艙室布置的要求。
[1] 耿 燾.IMO動力定位系統規范介紹[J].中國造船,2008,49(S2):624-627.
[2] 何崇德.船舶動力定位系統的應用與實踐[J].中國造船,2004,45(S):279-299.
[3] 黃建章,李惠珍.3000噸級中國海監船動力定位系統方案的探討[J].船舶,2002(6):38-42.
[4] 廣超越.船舶動力定位系統定位能力分析[D].武漢:武漢理工大學,2011.
[5] 李家煒,徐玉如,龐永杰.動力定位船舶的機動定位技術[J].哈爾濱工程大學學報,1998,19(3):22-28.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00