合肥市軌道交通3號線GPS控制網建立
2014-06-28 06:14:42付先國
城市勘測 2014年6期
關鍵詞:工程
付先國
(合肥市測繪設計研究院,安徽 合肥 230061)
1 引 言
合肥市軌道交通3 號線線路全長37.3 km,其中高架線4.46 km,地下線32.84 km(含U 形槽)。全線共設有車站33 座包括換乘站7 處,分別為:翡翠中路站、祁門路站、望江西路站、潛山路站、蒙城路站、合肥火車站站、北二環路站。其中高架站4 座,地下站29座。平均站間距為1 149 m,最大站間距1 720 m,最小站間距740 m。線路于北端設磨店車輛段,南端設翡翠湖停車場。線路起于職教園相城路站,沿淮海大道→文忠路→包公大道→北二環→銅陵北路→站前路→新蚌埠路→臨泉路→潛山路→天鵝湖路→翡翠路布設,止于方興大道站。途徑職教園、瑤海工業區、火車站地區、政務新區、經濟開發區及大學城等區域。
2 GPS 控制網設計
2.1 基準設計
《城市軌道交通工程測量規范》要求,若城市軌道交通工程線路軌道的平均高程與城市投影面高程的高差影響每千米大于5 mm時,應采用其線路軌道平均高程作為投影面高程。
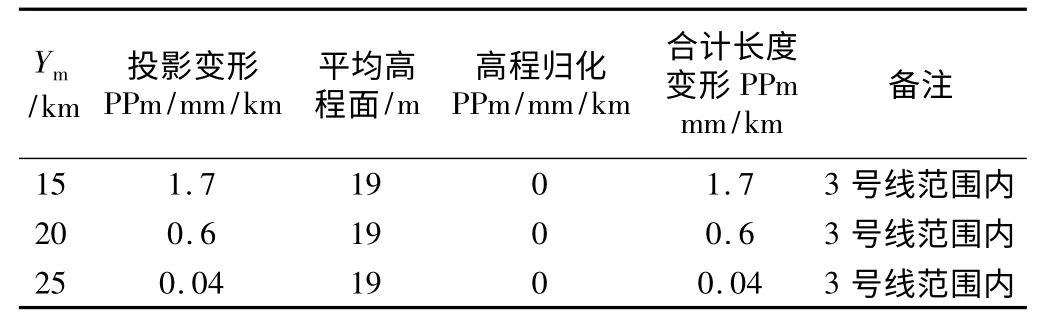
(1)合肥市城建坐標系統參數為:中央子午線為117°,投影面為參考橢球面,參考橢球為克拉索夫斯基橢球,投影方式為高斯投影。軌道3 號線工程范圍距離中央子午線117°約為15 km~40 km之間,工程平均高程為吳淞高程19 m(距參考橢球面高度69 m)。因此,軌道3 號線工程平均高程面上橫向東西跨度每千米長度的投影變形和高程歸化改正值如表1 所示:
表1 中,3 號線工程范圍內部分范圍東西向的橫向跨度范圍每千米長度合計變形大于5 mm,超過《城市軌道交通工程測量規范》要求。因此,必須建立新的軌道交通3 號線工程平面坐標系統及參數。
(2)通過調整中央子午線和投影面的高程,建立軌道交通3 號線工程平面坐標系統及參數,使得:①城市軌道交通3 號線工程線路長度的高程歸化影響值每千米小于5 mm;②城市軌道交通3 號線工程線路長度的投影變形影響值,每千米小于5 mm;③盡量使長度的高程歸化值和投影變形值的合計影響值最小。
(3)合肥市軌道交通3 號線工程平面坐標系統的參數:①1954年北京坐標系(克拉索夫斯基橢球,高斯投影);②中央子午線:117°17″;③投影面:吳淞高程19 m,即投影面大地高69 m。
在合肥市軌道交通3 號線工程平面坐標系統下的變形改正值如表2 所示:
工程坐標系下長度變形分析表 表2

續表2
滿足規范投影變形的要求。
(4)換算與轉換方法:①坐標換帶:按高斯換帶公式計算,消除投影變形的影響;②投影面的轉換計算采用橢球膨脹法,計算橢球長半軸膨脹大小的方法有多種,本項目轉換采用如下方法:da=dH,dα=0。即新橢球的扁率不變,投影面大地高的變化量為長半軸的增量。
2.2 指標設計
軌道交通GPS 控制網主要技術指標符合下表的規定。
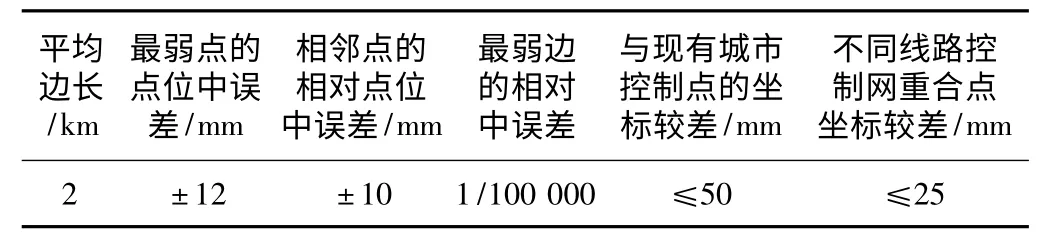
衛星定位控制網主要技術指標表 表3
3 選點與埋石
共埋設衛星定位控制點81 個,其中共用2 號線衛星定位點3 個,共用1 號線衛星定位點2 個。81 個點位中,埋設地面混凝土標石63 個,樓頂標石18 個。衛星定位控制點的選點埋設符合如下要求:
(1)一對控制點間必須確保通視,3 個及以上控制點兩兩通視;
(2)控制點選在利于長期保存、施測方便和施工影響范圍以外的地方;
(3)控制點附近沒有大面積水域或電磁波反射(或吸收)強烈的物體;控制點與無線電發射裝置的間距小于200 m,與高壓輸電線的間距小于50 m;
(4)控制點布設在隧道出入口、豎井或車站附近,車輛段附近布設3 個~5 個控制點;
(5)與合肥市軌道交通1、2、4、5、6、7 號線交叉聯絡處布設2 個以上的重合點。
4 外業觀測
本次外業觀測共計88 個點位,其中7 個為起算點(1 個為CORS 基站),81 個為待定點。考慮GPS 網的整體精度,先由CHDS、GS06、GS11、GS16、GS26、GS48、16 共7 個起算點組成2 個時段的框架網進行觀測,每時段觀測4 h。其余的按《城市軌道交通工程測量規范》要求,采用邊連式或網連式進行逐步推進,短邊每個時段觀測時間不少于1 h,長邊觀測時間不少于120 min。觀測完后對局部幾何圖形強度不好的進行了補測,對觀測質量差的基線進行了重測。
外業觀測使用8 臺Leica GPS 接收機,其中GS14型接收機5 臺,1230GG 型接收機1 臺,1230 型接收機2 臺。觀測前在接收機內設置衛星高度角(15°)、數據采樣間隔(10 s)。
GPS 控制網聯測示意圖如圖1 所示。
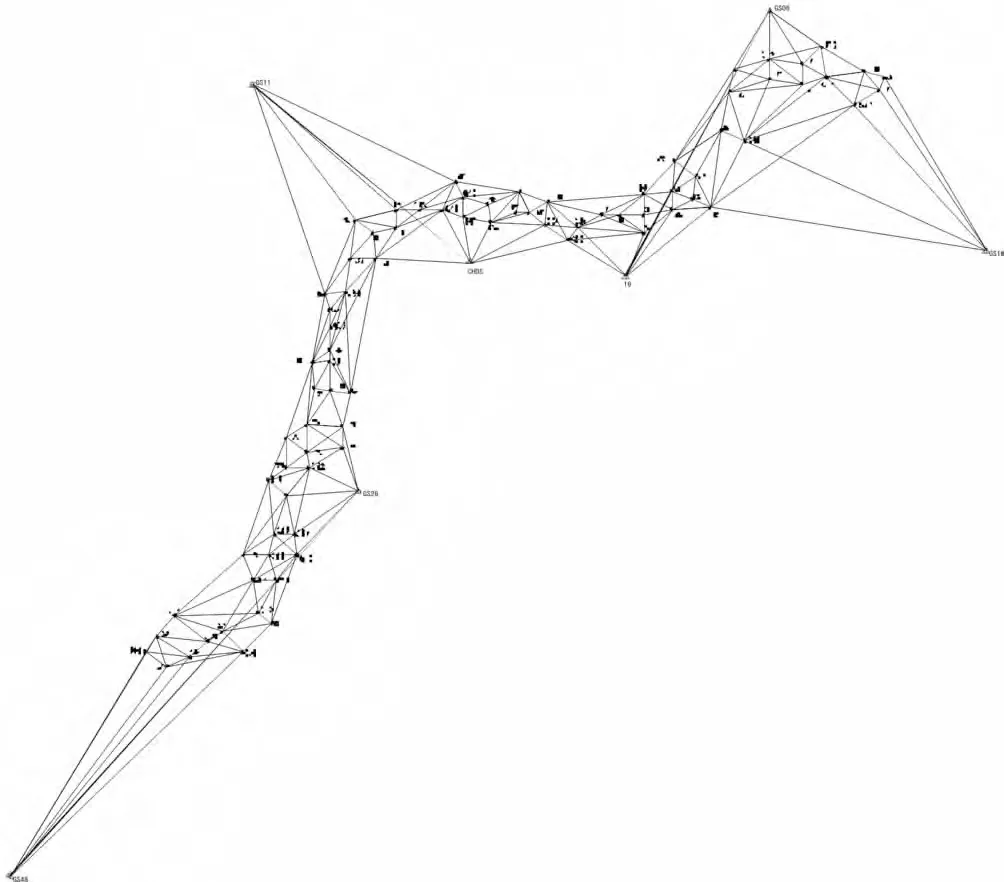
圖1 3 號線GPS 控制網示意圖
本次外業觀測重復設站數為3.2。外業觀測滿足如下要求:
(1)聯測1 號線衛星定位控制點WX4、WX5;聯測2 號線衛星定位控制點GPSII31、GPSII66、GPSII88;
(2)測前對GPS 接收機進行常規項目的檢驗檢查,以保證良好的工作狀態;外業開機前檢查設備的各種連接是否正確。觀測過程中,作業人員不離開GPS接收機,不使用手機、對講機等對信號有干擾影響的電子通訊設備;
(3)精確地進行天線對中整平,對中誤差不大于2 mm;每時段觀測前、后量取天線高各一次,兩次互差小于3 mm,取兩次平均值作為最終成果;
(4)相鄰通視的點位之間采用直接基線邊連接;
(5)每一同步環觀測2 個時段,不同時段改變儀器高度,以獲得重復基線,前后時段儀器嚴格對中整平,盡量避免因多次安置儀器對重復基線較差帶來的影響。
5 GPS 控制網的數據處理
5.1 基線解算
基線向量解算是利用2 個或多個測站的GPS 同步載波相位觀測值確定測站之間坐標差的過程。本項目采用Trimble 隨機軟件TBC 按靜態相對定位模式解算,基線解算采用衛星廣播星歷坐標作為基線解的起算數據。解算前對數據進行預處理,對觀測質量不好的數據進行剔除,解算后對不理想的解算成果進行干預,或改變衛星高度角,或對觀測值殘差比較大的時段進行刪除、或選取不同的參考衛星等進行重新解算。數據處理將框架網與控制網一并處理。
(1)本網全部由獨立基線組網,選擇其中的272條參與平差計算。由參與平差的獨立基線組成的3 邊異步環共164 個。Wx的最大值為31.20 mm(限差42.83 mm),Wy的最大值(最大值為框架網環)為42.30 mm(限差74.58 mm),Wz的最大值(最大值為框架網環)為33.10 mm(限差74.58 mm),異步環全長閉合差最大值為53.84 mm(限差129.18 mm),對應的閉合環為框架網環16-GS06-CHDS。異步環全長閉合差分布情況如4 表所示:

異步環統計表 表4
(2)全網中參與平差的重復基線共16 條,最大基線較差為6.7 mm(限差為29.2 mm),基線較差分布情況如表5 所示:

重復基線統計表 表5
5.2 三維無約束平差
GPS 網平差計算采用武漢大學研制的COSA_GPS軟件。
以點CHDS 的現有WGS-84 坐標系的三維坐標作為起算數據,在WGS-84 坐標系中進行三維無約束平差。通過三維無約束平差得到:驗后單位權中誤差為±0.72 cm,最弱點的點位誤差為 ±1.17 cm,最弱邊邊長相對中誤差為1/135 000。通過三維無約束平差得到三維基線向量改正數:V△X最大為2.44 cm,對應邊為CHDS-GS26,限差為5.94 cm;V△Y最大為3.62 cm,對應邊為GS48-GS26,限差為11.44 cm;V△Z最大為2.81 cm,對應邊為GS06-GS16,限差為7.17 cm。
5.3 二維約束平差
二維約束平差采用兼容性較好的GS06、GS16、16、GS26、GS48 五個點作為起算點。CHDS、GS11 兩點作為檢核點。通過二維約束平差得到:驗后單位權中誤差為 ±0.78 cm,平差后最弱點的點位中誤差為±0.89 cm。最弱邊邊長相對誤差為1/113 000,對應邊長為560.620 m,相鄰點的相對點位中誤差為±0.63 cm,滿足規范要求。
5.4 成果比較
(1)重合1 號線衛星定位控制點WX4(3 號線GPSIII55)、WX5(3 號線GPSIII54)兩個點,重合2 號線衛星定位控制點GPSII31(3 號線GPSIII34)、GPSII66(3號線GPSIII32)、GPSII88(3 號線GPSIII33)3 個點,本次成果與1、2 號線成果較差如表6 所示:
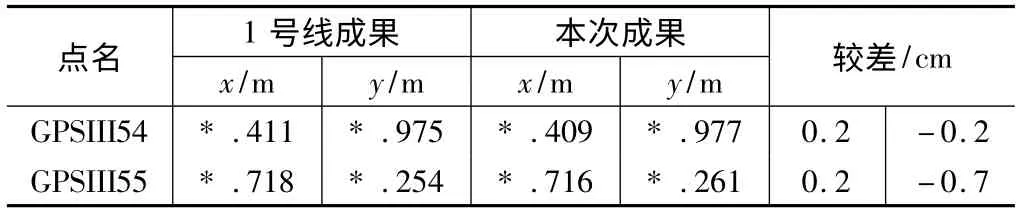
與1 號線重合點較差統計表 表6
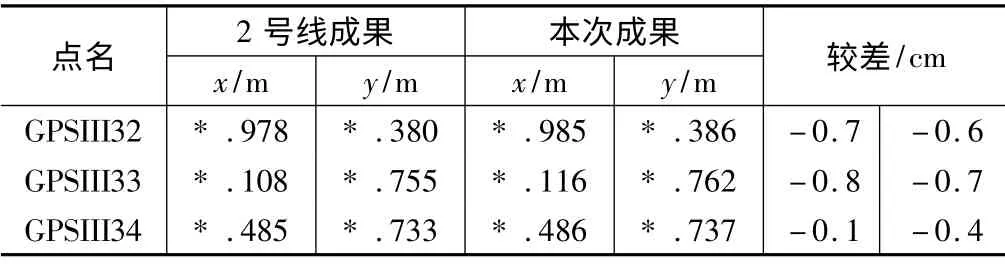
與2 號線重合點較差統計表 表7
滿足規范(不同線路控制網重合點坐標較差不大于25 mm)要求。
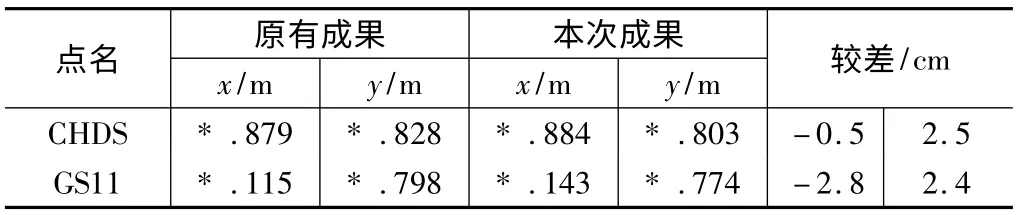
(2)CHDS、GS11 兩個城市控制點作為重合點使用,本次平差成果與原有成果較差如表8 所示:
與現有城市控制點坐標比較表 表8
滿足規范(與現有城市控制點的坐標較差不大于50 mm)要求。
6 結 語
合肥市軌道交通3 號線GPS 控制網,點位選擇合理,觀測成果可靠,精度滿足設計要求,能較好地滿足下一級四等精密導線網的觀測。通過本次控制網的施測,有如下幾點體會:
(1)軌道交通工程GPS 控制網的精度要求較高(尤其是相對精度),而通視的邊長相對較短,精度實現的壓力較大。因此,在選點時要避免出現超短邊。
(2)選擇合理的起算點至關重要,起始數據對控制網成果精度有非常大的影響,約束平差時兼容性不好的起算點會引起GPS 網變形,嚴重損害整網的精度。
[1]GB50308-2008.城市軌道交通工程測量規范[S].
[2]陳榮林.南昌城市軌道交通工程GPS 控制網的建立方法[J].江西測繪,2010(4):228~239.
[3]黃北新、付先國等.合肥軌道交通1 號線GPS 控制網建立[J].城市勘測,2010(4):97~99.
[4]史秀保,袁崢.寧波軌道交通1 號線一期工程GPS 控制網建立及精度分析[J].城市勘測,2009(4):82~84.
[5]王曉芳,唐青松.成都地鐵三號線控制網的布設[J].城市勘測,2014(3):103~106.
[6]吳浩,楊劍,黎華.GPS 原理及工程安全監測應用[M].武漢:武漢理工大學出版社,2014.
猜你喜歡
工程爆破(2022年3期)2022-07-26 01:58:56
工程爆破(2022年2期)2022-06-17 14:13:56
太空探索(2016年6期)2016-07-10 12:09:06
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
筑路機械與施工機械化(2014年10期)2014-03-01 03:01:59
筑路機械與施工機械化(2014年8期)2014-03-01 03:00:52
筑路機械與施工機械化(2014年7期)2014-03-01 03:00:16
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:07
筑路機械與施工機械化(2014年4期)2014-03-01 02:58:34