PSWST-PLC型調(diào)速器在水電站的應(yīng)用
2014-07-04 03:26:28吳名鋼
電力安全技術(shù) 2014年4期
吳名鋼
(大源渡航電樞紐管理處, 湖南 衡陽 421412)
某水電站4 臺燈泡貫流式發(fā)電機組全部從奧地利ELIN 公司引進; 水輪機為轉(zhuǎn)槳式,分別從德國SULZE 公司和MCE 公司引進。4 臺機組于1999-10-28 全部并網(wǎng)發(fā)電。2012年,水電站采用武漢國測三聯(lián)水電設(shè)備有限公司生產(chǎn)的PSWST-PLC型調(diào)速器,對4 號機組進行了改造。
1 PSWST-PLC 型調(diào)速器的總體構(gòu)成
PSWST-PLC 型調(diào)速器由微機調(diào)節(jié)器和機械液壓系統(tǒng)兩大部分組成。微機調(diào)節(jié)器部分采用雙機(A、B 機)冗余容錯系統(tǒng),2 套微機控制器均能獨立完成水輪發(fā)電機組的開機、停機、增減負荷、緊急停機等自動調(diào)節(jié)任務(wù),微機控制器選用德國西門子公司生產(chǎn)的S7-300 系列PLC;機械液壓系統(tǒng)由電液轉(zhuǎn)換器(采用比例伺服閥+高速數(shù)字球閥冗余結(jié)構(gòu))、緊急停機、主配壓閥、純機械手動機構(gòu)等組成,采用先進的機械液壓集成技術(shù),無明管、無泄漏、無杠桿。
2 PSWST-PLC 型調(diào)速器的工作方式
2.1 自動調(diào)節(jié)
自動通道由微機控制器組成,微機控制器A或B 均能控制機械液壓系統(tǒng)自動通道的比例伺服閥或高速數(shù)字球閥。微機控制器采用適應(yīng)式變參數(shù)的機組轉(zhuǎn)速(頻率)PID 調(diào)節(jié)規(guī)律和機組功率適應(yīng)式變參數(shù)PI 控制規(guī)律。微機控制器接收機組LCU的“事故停機信號”,并且控制接力器以允許的最快速率關(guān)閉到全關(guān)。
2.2 電手動調(diào)節(jié)
在電手動調(diào)節(jié)模式工作時,微機控制器A 或B 控制機械液壓系統(tǒng)的比例伺服閥或高速數(shù)字球閥,跟蹤與調(diào)速系統(tǒng)有關(guān)的狀態(tài)及參數(shù),以實現(xiàn)由“電手動控制”到“自動調(diào)節(jié)”之間的無擾動切換。電手動調(diào)節(jié)也可通過現(xiàn)地控制柜面板實現(xiàn)“電手動控制”到“純機械手動”之間的無擾動切換。
2.3 純機械手動
失電時,自復(fù)中裝置在壓力油的作用下可帶動主配壓閥回到復(fù)中位置,由手動操作閥與其一起執(zhí)行純機械手動功能。
2.4 控制方式的切換
PSWST-PLC 型調(diào)速器在各種控制方式間可實現(xiàn)無擾動切換。
(1)自動通道、電手動之間的切換:通過調(diào)速器控制柜操作開關(guān)切換。
(2)電手動切換至純機械液壓手動:電手動通道故障切換至純機械液壓手動。
(3)自動通道、純機械液壓手動之間切換:通過調(diào)速器控制柜操作開關(guān)切換,或自動通道故障切換至純機械液壓手動。
3 PSWST-PLC 型調(diào)速器的特點
3.1 全時PID 控制技術(shù)
圖1 為全時PID 控制邏輯示意。由圖1 可知,全時PID 算法的精髓主要是在PID 上增加了連續(xù)調(diào)節(jié)的PD 環(huán)節(jié)。即將連續(xù)10 個周期采樣的被調(diào)節(jié)偏差放入1 個數(shù)組,得到10 個ΔF(被控制偏差值):ΔF(k),ΔF(k-1),ΔF(k-2)…ΔF(k-9),并在數(shù)組中記錄好偏差的正負標志和偏差的周期數(shù);當檢測到當前偏差值與上周期偏差值相等時,選擇數(shù)組中與當前偏差符號相同的最大偏差值,并根據(jù)最大偏差的周期數(shù),相應(yīng)地改變微分時間常數(shù)T1v和偏差的測量周期τ來進行PD 調(diào)節(jié);調(diào)節(jié)完成后,在數(shù)組中剔除此偏差值。這樣就避免了在被調(diào)節(jié)量偏離目標值、但偏差變化緩慢時,出現(xiàn)比例和微分通道幾乎不起作用的現(xiàn)象。
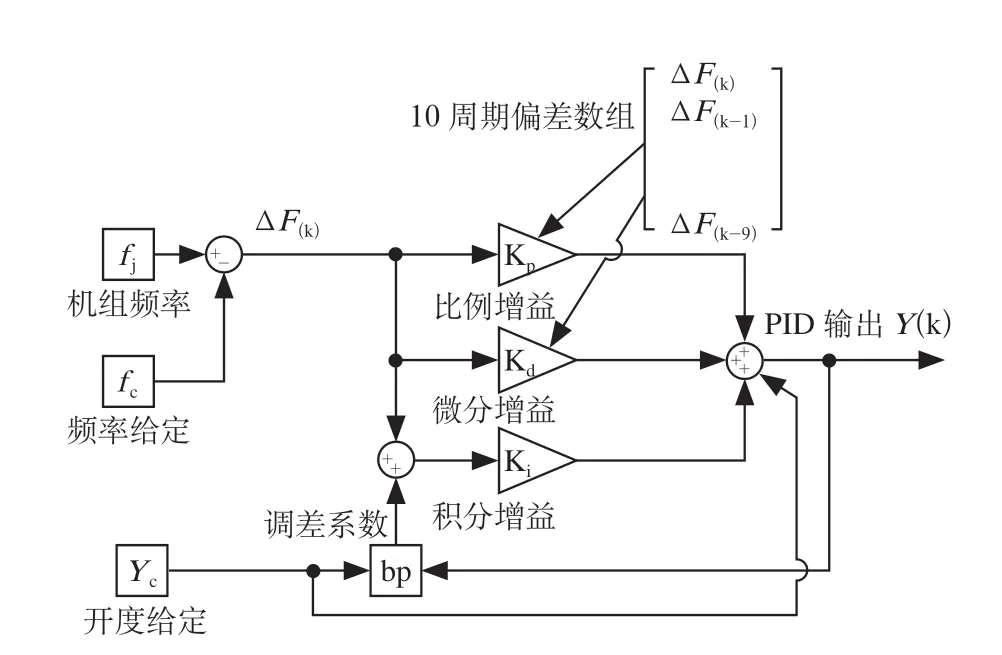
圖1 全時PID 控制邏輯
PID 控制器算式如下:

相應(yīng)的離散算式為:

其中:KP、Ki、Kd分別為比例、積分、微分系數(shù);
e(k)為第k 次采樣值;
u(k)為第k 次采樣時刻的輸出值。
根據(jù)式(2),用一個單神經(jīng)元構(gòu)造PID 控制器,如圖2 所示。
圖2 中控制器偏差X1(k)=e(k);控制器輸入X2(k)=e(k)-e(k-1),X3(k)=e(k)-2e(k-1)+e(k-2);控制器輸出u(k)=W1X1(k)+W2X2(k)+W3X3(k)。其中,Wi為控制器的加權(quán)系數(shù),相當于PID 控制器中的KP,Ki,Kd,但參數(shù)Wi可以進行在線修正,可根據(jù)被調(diào)節(jié)量的偏差不斷地調(diào)節(jié)PID 系數(shù),以達到調(diào)整Wi的目的,從而找到最優(yōu)值W*。
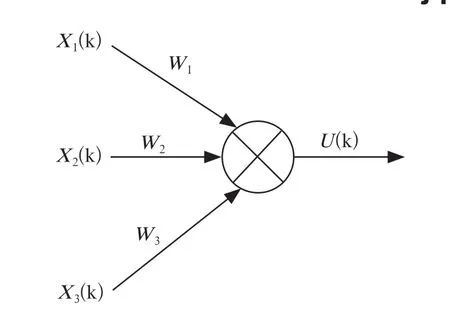
圖2 單神經(jīng)元構(gòu)造的PID 控制器邏輯
為提高調(diào)速器的靜動態(tài)品質(zhì),在控制電液隨動系統(tǒng)中,可采用PI 型綜合放大器減小調(diào)速器的轉(zhuǎn)速死區(qū)ix和槳葉隨動系統(tǒng)的不準確度ia;采用PD型綜合放大器減小接力器不動時間Tq。
微分控制是指當輸入偏差值突然變化時,微分作用可有效地阻止或刺激控制器輸出相應(yīng)變化。這時,控制器的動作僅受微分作用決定,而不受比例或者積分控制的計算結(jié)果影響。
輸出控制PD+PI 的基本設(shè)計思想是,當偏差較大時,投入微分控制,取消積分作用;當偏差較小時,引入積分控制,取消微分作用。
3.2 防機組飛逸
3.2.1 閉環(huán)開機及同期控制
根據(jù)機組轉(zhuǎn)速變化的速率自動改變開機曲線的斜率和頂點,自動適應(yīng)任何水頭的變化,從而達到平穩(wěn)、快速、無超調(diào)自適應(yīng)閉環(huán)開機的目的。全范圍開放式的測頻方法,能保證在0.5~99 Hz 范圍內(nèi)可靠的頻率測量結(jié)果,在低頻段采用以導(dǎo)葉開度為依據(jù)的轉(zhuǎn)速逐次逼近,在高頻段則采用趨勢辨別轉(zhuǎn)速的方式。這種開機規(guī)律是以最佳過程啟動水輪發(fā)電機機組,盡量減少開機時間,能夠保證在任何異常情況(如機組導(dǎo)葉漏水,機組未停穩(wěn),機、網(wǎng)頻率斷線,導(dǎo)葉反饋斷線等)下不過速、不停機。
3.2.2 空載自動調(diào)節(jié)
調(diào)速器的參數(shù)中設(shè)置了最大及最小空載開度值。因此,調(diào)速器在空載運行時,應(yīng)始終將導(dǎo)葉開度控制在該范圍內(nèi)。
3.2.3 關(guān)鍵信號容錯能力
頻率容錯,即實時自動診斷機組頻率及系統(tǒng)頻率,提示故障類別。在空載時,當檢測到機組頻率故障,則自動將當前導(dǎo)葉開度調(diào)至最小空載開度(最高水頭下的空載開度);當系統(tǒng)頻率故障,則自動跟蹤頻率給定。在負載時,機、網(wǎng)頻互為容錯;當機頻發(fā)生故障時,自動取網(wǎng)頻,否則取機頻作為被調(diào)節(jié)量;當機、網(wǎng)頻均發(fā)生故障時,可現(xiàn)地或遠方手動控制機組的轉(zhuǎn)速或有功功率(導(dǎo)葉開度)。
3.3 防假甩負荷
為防止斷路器誤故障,使得機組甩負荷,系統(tǒng)在判斷甩負荷的條件中增加了機組頻率和有功功率判據(jù)。當斷路器信號斷開時,先給導(dǎo)葉1 個快關(guān)信號,若機組頻率并未上升,且功率未下降,則認為機組仍并網(wǎng)運行;若斷路器信號斷開,且機組頻率上升、功率下降,則確認機組甩負荷,調(diào)速器進入甩負荷狀態(tài)。
3.4 防機組慢轉(zhuǎn)
根據(jù)機組轉(zhuǎn)速變化的速率自動改變開機曲線的斜率和頂點,自動適應(yīng)任何水頭的變化,達到平穩(wěn)、快速、無超調(diào)自適應(yīng)閉環(huán)開機的目的。同時,具有空載頻率跟蹤及相位調(diào)節(jié)功能,以保證同頻同相,具有快速并網(wǎng)能力。
3.5 防空載泄水
3.5.1 縮短空載運行時間
采用閉環(huán)開機及補償PID 空載算法,并且具有空載頻率跟蹤及相位調(diào)節(jié)能力,減少了從發(fā)出開機令至機組到空載的時間,縮短了機組空載到并網(wǎng)的時間。
3.5.2 壓緊行程
機組備用工況調(diào)速器具有1 %~3 %的“壓緊行程”,在停機連鎖工況下可使主配壓閥保持在相對偏關(guān)的位置,確保機組的關(guān)閉,有效地防止導(dǎo)葉漏水。
3.6 控制機組轉(zhuǎn)速下降
機組甩大開度負荷時,根據(jù)轉(zhuǎn)速決定導(dǎo)葉開啟的速度和大小,可有效地控制機組的轉(zhuǎn)速下降。當機組甩負荷50 %以上時,機組的轉(zhuǎn)速上升,導(dǎo)葉快速關(guān)閉,電氣開限設(shè)定為2 倍的空載電氣開限;當機組轉(zhuǎn)速上升到最高點后開始下降時,導(dǎo)葉關(guān)閉速度減慢,如果此時機組已全關(guān),則將導(dǎo)葉開啟到5 %~10 %的開度,以減小下游涌浪;當機組轉(zhuǎn)速下降的變化率大于某一個值時,控制導(dǎo)葉快速開啟到空載,然后減慢開啟速度。該方式可控制甩負荷大于50 %時機組轉(zhuǎn)速下降至最低值,并且可縮短甩負荷過程中調(diào)速器調(diào)節(jié)的過渡過程。
3.7 控制涌浪
為了避免甩大負荷時上下游水位發(fā)生較大的涌浪,調(diào)速系統(tǒng)還設(shè)有涌浪控制軟件程序。調(diào)速器甩負荷時上下游水位發(fā)生較大的涌浪,會造成水錘壓力過大。因此,采用甩負荷導(dǎo)葉不全關(guān)、轉(zhuǎn)速由上升至下降過程中導(dǎo)葉打開和甩負荷后使空載電氣開度限制值大于開機過程的空載電氣開度限制值等智能化控制方式,可保證甩負荷后空載調(diào)節(jié)范圍更寬,抑制機組轉(zhuǎn)速下降至過低,大大縮短甩負荷的過渡過程,同時減小下游產(chǎn)生的涌浪。
單機甩較大負荷時,機組轉(zhuǎn)速上升過高,應(yīng)快速關(guān)閉導(dǎo)葉。當機組轉(zhuǎn)速下降時,打開導(dǎo)葉開度到某一預(yù)置開度,以減少水錘壓力的上升;當機組轉(zhuǎn)速下降到額定轉(zhuǎn)速附近時,投入PID 控制,使機組轉(zhuǎn)速穩(wěn)定在額定轉(zhuǎn)速。多機甩較大負荷時,關(guān)閉導(dǎo)葉并自動脫協(xié)聯(lián),由槳葉的角度控制機組轉(zhuǎn)速下降和減弱流域的涌浪強度。
3.8 增強槳葉的協(xié)聯(lián)功能
調(diào)速器通過電氣協(xié)聯(lián)方式實現(xiàn)水輪機導(dǎo)葉與槳葉的協(xié)聯(lián)。根據(jù)水輪機協(xié)聯(lián)曲線整定的協(xié)聯(lián)函數(shù)發(fā)生器,按實際水頭自動選擇相應(yīng)協(xié)聯(lián)曲線,停機后自動將輪葉開到啟動角度,并在啟動過程中根據(jù)導(dǎo)葉開度的開啟自動切換到正常協(xié)聯(lián)。
3.8.1 正常協(xié)聯(lián)
常規(guī)數(shù)字協(xié)聯(lián)方式是接受水頭信號,并按實際水頭自動選擇相應(yīng)的協(xié)聯(lián)曲線,預(yù)設(shè)10 條水頭下的協(xié)聯(lián)曲線,每條協(xié)聯(lián)曲線上設(shè)置10 個點,線與線之間以及點與點之間采用線性插值,最后采用逐次逼近方式輸出,可保證與理論協(xié)聯(lián)曲線一致。
3.8.2 增強協(xié)聯(lián)
(1)開度與協(xié)聯(lián)的關(guān)系修正。當導(dǎo)葉開度不變時,槳葉的協(xié)聯(lián)點在一個小范圍內(nèi)自動修正,以彌補協(xié)聯(lián)曲線理論與實際的誤差。
(2)振動、擺動與協(xié)聯(lián)的關(guān)系修正。當導(dǎo)葉開度一定時,槳葉的協(xié)聯(lián)點在一個小范圍內(nèi)自動修正,以抑制機組的振動、擺動情況(在引入機組振動、擺動模擬量的前提下)。
(3)負荷與協(xié)聯(lián)的關(guān)系修正。當導(dǎo)葉開度一定時,自動修正槳葉的協(xié)聯(lián)點,以控制機組的效率最高及負荷的擺動最小,保證機組高效、穩(wěn)定運行。
3.8.3 非正常協(xié)聯(lián)
(1)流量與協(xié)聯(lián)角度的控制。在引入通過機組流量信號的前提下,用槳葉角度來控制機組負荷與流量。
(2)涌浪與協(xié)聯(lián)角度控制。當線路開關(guān)或者多臺機組甩大開度負荷時,自動脫協(xié)聯(lián),有效地控制下游涌浪。
3.9 大、小網(wǎng)及孤網(wǎng)判定
以轉(zhuǎn)速的變化和變化率為依據(jù)準確地判斷機組在大、小電網(wǎng)中的運行情況,并且自動切換運行工況和調(diào)節(jié)參數(shù),可以人為選擇一次調(diào)頻是否投切。當一次調(diào)頻投入,電網(wǎng)頻率的波動大于一次調(diào)頻死區(qū)而小于小電網(wǎng)的死區(qū)時,調(diào)速器按照調(diào)差率bp 控制機組的出力,以保證電網(wǎng)的穩(wěn)定運行;當線路發(fā)生故障或線路開關(guān)跳閘時,調(diào)速器能夠自動、平穩(wěn)地運行在大、小電網(wǎng),孤網(wǎng),廠用電及空載工況下。
負載運行時,可根據(jù)頻率的變化以及負荷或開度的調(diào)整對頻率引起的變化作為判斷大小電網(wǎng)的依據(jù),自動改變運行模式。在開度調(diào)節(jié)或功率調(diào)節(jié)模式下,當判斷為小電網(wǎng)或電網(wǎng)故障時,機組將自動切換到頻率調(diào)節(jié)模式運行。
當轉(zhuǎn)速變化率超過頻率失靈區(qū)N 個周期后,機組自動切入頻率調(diào)節(jié)模式,并轉(zhuǎn)至小網(wǎng)運行;當頻率變化率在頻率失靈區(qū)范圍內(nèi),一段時間后,機組自動切入開度調(diào)節(jié)或者功率調(diào)節(jié)模式,并轉(zhuǎn)至大電網(wǎng)運行。
4 結(jié)束語
水電站4 號機組調(diào)速器經(jīng)改造后,總體運行情況良好,故障少、維護量小,大大提高了水電站的安全性指標和經(jīng)濟性指標,對其他電站有很好的借鑒和推廣作用。