新型雕刻機(jī)器人控制策略的研究
2014-07-04 01:33:46羅繼曼張明山安玉振孫曉偉
機(jī)械與電子 2014年4期
關(guān)鍵詞:控制策略
羅繼曼,張明山,安玉振,孫曉偉
(沈陽建筑大學(xué)交通與機(jī)械工程學(xué)院,遼寧 沈陽110168)
0 引言
新型雕刻機(jī)器人能夠5自由度的運(yùn)動,即是實(shí)現(xiàn)X,Y,Z軸平動和繞X,Y轉(zhuǎn)動。與傳統(tǒng)5自由度串聯(lián)機(jī)械手相比,具有結(jié)構(gòu)簡單、承載能力強(qiáng)、精度高和末端件慣性小等優(yōu)點(diǎn),在高速,大承載能力的場合,與串聯(lián)機(jī)器人相比具有明顯優(yōu)勢。另外,雕刻機(jī)器人相對于傳統(tǒng)的5自由度串聯(lián)機(jī)械手具有反應(yīng)速度快,積累誤差小,易于實(shí)現(xiàn)的優(yōu)點(diǎn)。在運(yùn)動學(xué)和動力學(xué)方面,參考文獻(xiàn)[1-4]對并聯(lián)機(jī)器人的發(fā)展史、位置、奇異性和運(yùn)動學(xué)進(jìn)行了分析,參考文獻(xiàn)[5-6]對各種并聯(lián)機(jī)構(gòu)的動力學(xué)進(jìn)行了分析與研究;在控制策略方面,參考文獻(xiàn)[7-9]對并聯(lián)機(jī)構(gòu)各種控制算法以及仿真方法進(jìn)行了研究。雕刻機(jī)器人擁有合適的運(yùn)動控制策略,能夠保證刀尖點(diǎn)運(yùn)動過程中具有較好的位置精度,減少了位置控制誤差,從而獲得較好的表面加工質(zhì)量。
1 雕刻并聯(lián)頭運(yùn)動學(xué)分析
新型混聯(lián)雕刻機(jī)器人由機(jī)床本體和雕刻并聯(lián)頭2部分組成。機(jī)床本體主要實(shí)現(xiàn)X,Y軸的平動(X軸有1個(gè)伺服電機(jī)控制,實(shí)現(xiàn)X軸平動;Y軸有2個(gè)伺服電機(jī)控制同步控制,同步實(shí)現(xiàn)Y軸的平動),雕刻并聯(lián)頭有3個(gè)伺服電機(jī)控制。新型混聯(lián)雕刻機(jī)器人如圖1所示。
雕刻機(jī)器人的雕刻并聯(lián)頭,是由靜平臺、動平臺、伸縮桿和約束鏈4部分組成,如圖2所示。其中,3根伸縮桿與靜平臺通過虎克鉸鏈相連,通過球鉸鏈與動平臺相連,伸縮桿均為移動副,3個(gè)移動副為本機(jī)構(gòu)的3個(gè)驅(qū)動副。伸縮桿通過虎克鉸與靜平臺相連,通過另一端與動平臺保持固定。
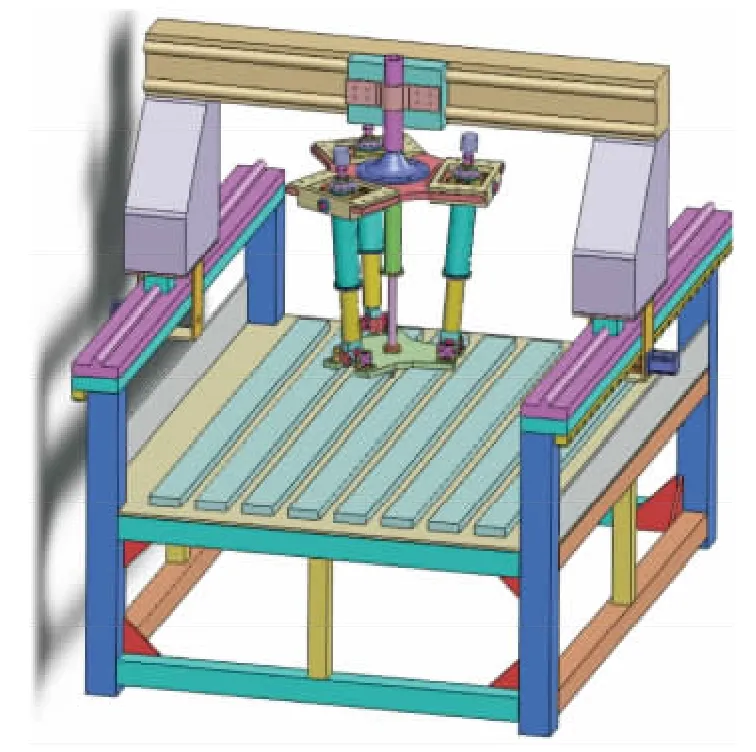
圖1 新型混聯(lián)雕刻機(jī)器人
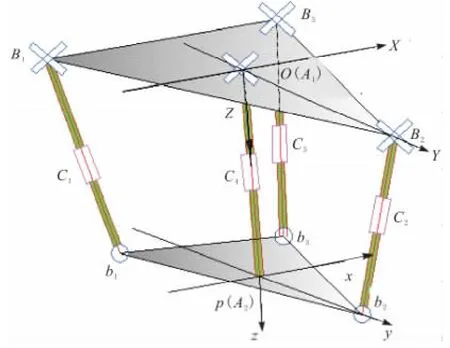
圖2 雕刻并聯(lián)頭
靜平臺的外接圓半徑為R1,靜坐標(biāo)系原點(diǎn)O與靜平臺質(zhì)心重合,其中,Y軸恰好通過B2點(diǎn),Z軸垂直向上,X軸與B2B3軸相交。動平臺的外接圓半徑為R2,動坐標(biāo)原點(diǎn)p與位于動平臺的質(zhì)心,其中,y軸通過b2點(diǎn),z軸垂直向上,x軸與b1b2軸相交。
由坐標(biāo)轉(zhuǎn)化建立如下方程:

動坐標(biāo)系中,末端執(zhí)行器p相對于靜坐標(biāo)系的齊次方程為:

c為cos,s為sin,下同。因此,3個(gè)驅(qū)動桿桿長矢量Li可在固定坐標(biāo)系中,表示為:

3根伸縮桿的桿長為:

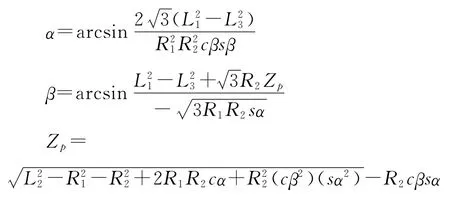
運(yùn)動學(xué)逆解為:

根據(jù)解析法求得α,β,Zp分別為:
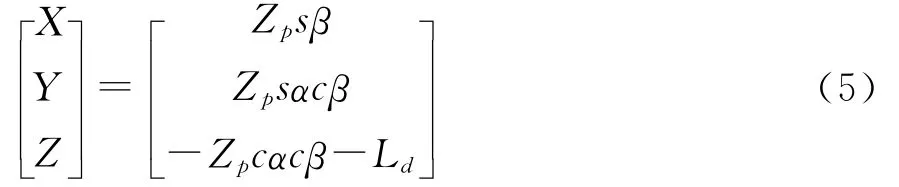
刀尖點(diǎn)在靜坐標(biāo)系的位置矢量為:
2 混聯(lián)雕刻機(jī)器人控制策略的研究
2.1 PD控制
PD控制器結(jié)構(gòu)簡單、實(shí)時(shí)計(jì)算量小,它是機(jī)器人運(yùn)動控制中最常用的一種控制器。系統(tǒng)控制如圖3所示。
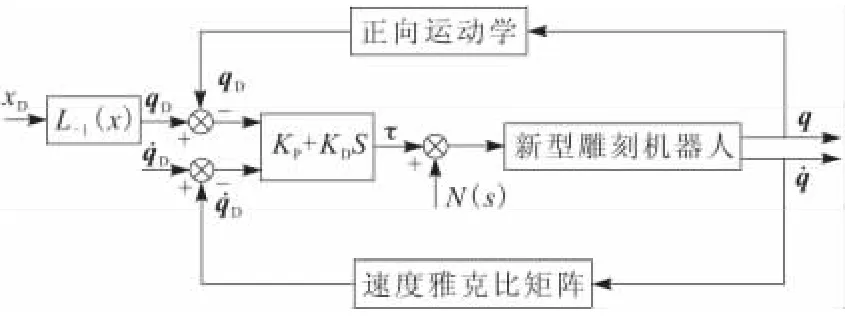
圖3 PD控制系統(tǒng)
KD=diag(KD1,KD2,KD3),KDi>0 (i=1,2,3);KP=diag(KP1,KP2,KP3),KPi>0(i=1,2,3);L-1(x)為雕刻機(jī)器人運(yùn)動學(xué)逆解;xD為刀尖點(diǎn)的期望位置;N(S)為擾動項(xiàng);qD為關(guān)節(jié)的期望位置;q為關(guān)節(jié)的實(shí)際位置D為關(guān)節(jié)的期望速度;q為關(guān)節(jié)的實(shí)際速度。新型雕刻機(jī)器人雕刻并聯(lián)頭關(guān)節(jié)空間的動力學(xué)方程為:

PD控制規(guī)律為:

2.2 PD加重力補(bǔ)償控制
PD加重力補(bǔ)償控制是在傳統(tǒng)PD控制基礎(chǔ)上考慮了重力補(bǔ)償因素的一種控制策略,相比其他派生控制策略具有易于實(shí)現(xiàn)的特點(diǎn)。該新型控制策略由于考慮重力補(bǔ)償,在機(jī)器人高速運(yùn)動的情況下具有較好的控制效果。系統(tǒng)控制如圖4所示。

圖4 PD加重力補(bǔ)償系統(tǒng)
PD加重力補(bǔ)償?shù)目刂埔?guī)律為:

2.3 計(jì)算力矩法
計(jì)算力矩控制是以PD控制為基礎(chǔ)。通過在PD控制上加入速度反饋、加速度前饋和重力補(bǔ)償?shù)玫健T谟?jì)算力矩控制法作用下,控制系統(tǒng)如圖5所示。
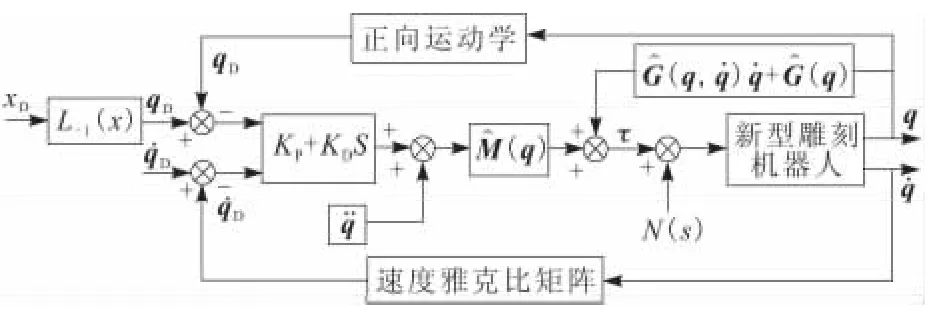
圖5 計(jì)算力矩法控制系統(tǒng)

3 3種控制策略的位置控制仿真
設(shè)新型雕刻機(jī)器人雕刻并聯(lián)頭的軌跡模型為:

靜平臺的質(zhì)量為M=150 kg,靜平臺外接圓半徑R1=0.378 m,動平臺的質(zhì)量為mp=35 kg,動平臺外接圓半徑R2=0.25 m,外接圓3根驅(qū)動桿的質(zhì)量完全相同mt=25 kg,仿真時(shí)間為6 s。
3.1 PD控制
參數(shù)設(shè)置:KD=diag(6 000,6 000,6 000),KP=diag(2 000,2 000,2 000),外部干擾信號取最小值為0,最大值為1 000的隨機(jī)信號。
根據(jù)PD控制算法,得出了動平臺刀尖點(diǎn)的位置誤差曲線和驅(qū)動力的變化曲線。Matlab/Simulink仿真結(jié)果如圖6所示。
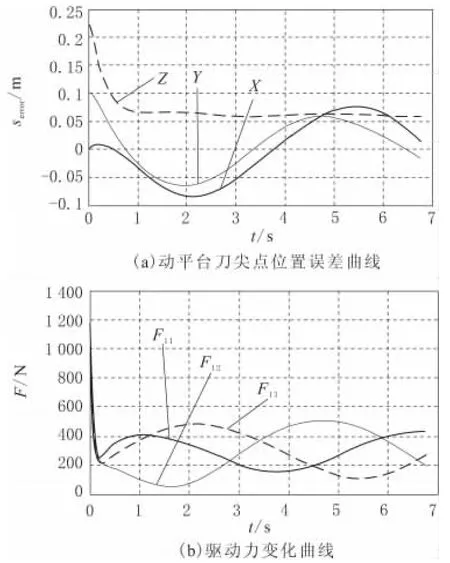
圖6 PD控制
3.2 PD加重力補(bǔ)償控制
參數(shù)設(shè)置:KD=diag(6 000,6 000,6 000),KP=diag(2 000,2 000,2 000),外部干擾信號取最小值為0,最大值為1 000的隨機(jī)信號。
根據(jù)PD加重力補(bǔ)償控制算法,得出了動平臺刀尖點(diǎn)的位置誤差曲線和驅(qū)動力的變化曲線。Matlab/Simulink仿真結(jié)果如圖7所示。
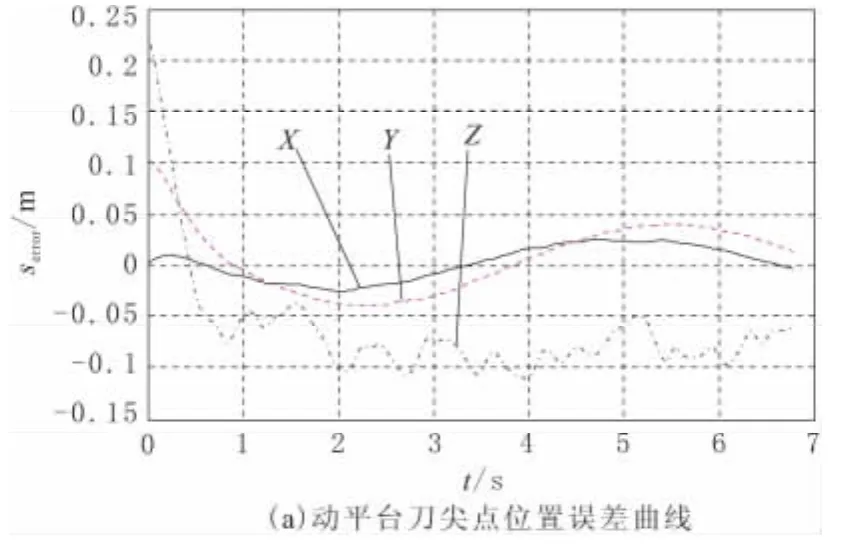
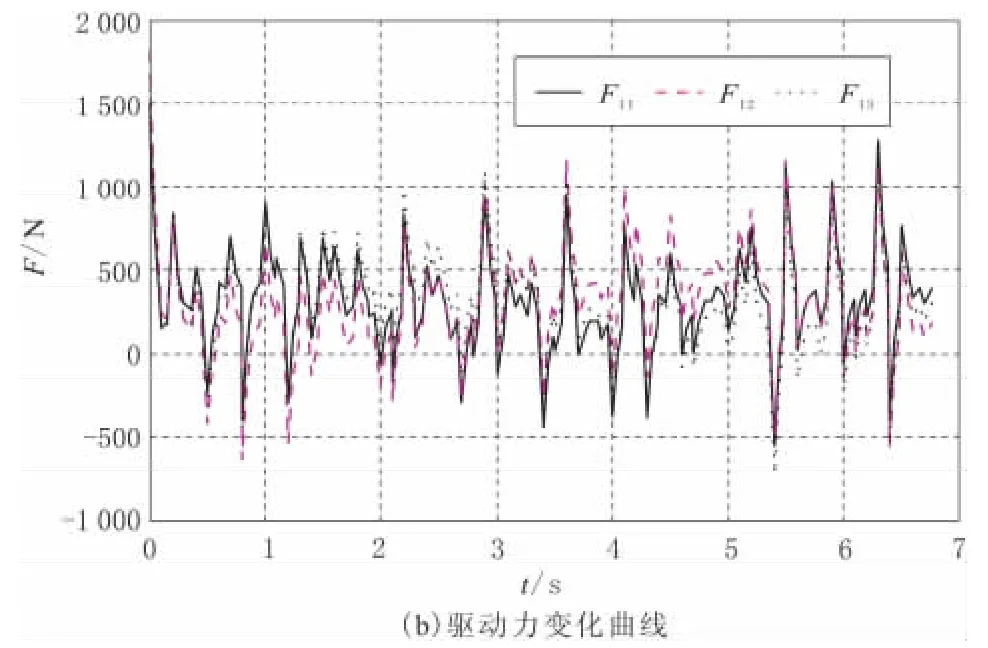
圖7 PD加重力補(bǔ)償控制
3.3 計(jì)算力矩法
參數(shù)設(shè)置:KD=diag(6 000,6 000,6 000),KP=diag(300,300,300),外部干擾信號取最小值為0,最大值為1 000的隨機(jī)信號。
根據(jù)計(jì)算控制算法,得出了動平臺刀尖點(diǎn)的位置誤差曲線和驅(qū)動力變化曲線。Matlab/Simulink仿真結(jié)果如圖8所示。
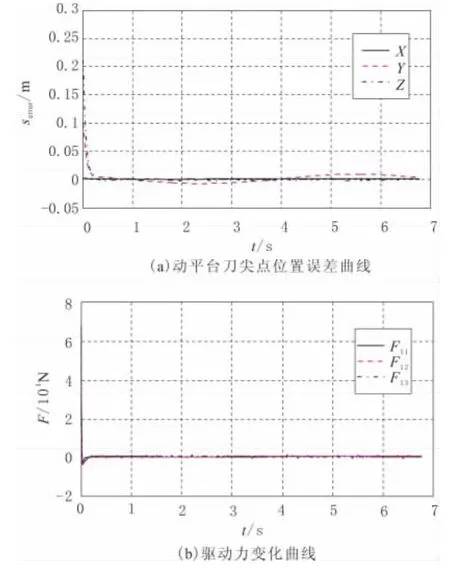
圖8 計(jì)算力矩控制
根據(jù)圖6~圖8得出以下結(jié)論:
a.當(dāng)新型雕刻機(jī)器人受到外界干擾后,在仿真時(shí)間段內(nèi),動平臺刀尖點(diǎn)的位置誤差曲線隨時(shí)間變化,都逐漸都趨向于0。計(jì)算力矩法的位置誤差曲線隨時(shí)間回歸0的速度最快,效果最好。
b.當(dāng)新型雕刻機(jī)器人受到外界干擾后,在仿真時(shí)間段內(nèi),PD控制算法驅(qū)動力隨時(shí)間變化且始終存在,PD加重力補(bǔ)償控制算法隨時(shí)間變化跳躍較大,計(jì)算力矩法控制驅(qū)動力隨時(shí)間變化很快趨近于零。
4 結(jié)束語
基于新型雕刻機(jī)器人的運(yùn)動學(xué)模型,研究了新型雕刻機(jī)器人雕刻并聯(lián)頭的3種控制策略。針對新型雕刻機(jī)器人的3種控制算法,采用Matlab/Simulink軟件進(jìn)行仿真,對比得知,計(jì)算力矩法效果較好,具有較強(qiáng)的外界抗干擾性。因此,采用計(jì)算力矩法,適合5自由度雕刻機(jī)器人。
[1] 劉善增,于躍慶,佀國寧,等.3自由度并聯(lián)機(jī)器人的運(yùn)動學(xué)與動力學(xué)分析[J].機(jī)械工程學(xué)報(bào),2009,45(8):11-17.
[2] 虞啟凱,游有鵬,韓江義.3-UrSR6自由度并聯(lián)機(jī)構(gòu)位置分析[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2011,42(12):215-219.
[3] PatanèF,Cappa P.A 3-DOF parallel robot with spherical motion for the rehabilitation and evaluation of balance performance[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2011,19(2):157-166.
[4] 李長河,蔡光起.并聯(lián)機(jī)床的發(fā)展與與國內(nèi)外的研究現(xiàn)狀[J].青島理工大學(xué)學(xué)報(bào),2008,29(1):7-13.
[5] 賈小輝,田延嶺,張大衛(wèi).3-RRP柔性并聯(lián)機(jī)構(gòu)動力學(xué)分析[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2010,41(10):199-203.
[6] Lauzier N,Gosselin C.3-DOF cartesian force limiting device based on the delta architecture for safe physical human-robot interaction[A].2010 IEEE International Conference on Robotics and Automation[C].USA:Anchorage Alaska,2010.3420-3425.
[7] 黃茹楠,高英杰,王洪瑞.并聯(lián)機(jī)器人的一種魯棒最優(yōu)控制結(jié)構(gòu)[J].燕山大學(xué)學(xué)報(bào),1999,23(2):175-177.
[8] 溫敬召.并聯(lián)機(jī)器人模型及其控制策略的研究[D].武漢:武漢理工大學(xué),2012.
[9] 王勝開,王正林,陳國順,等.Matlab/Simulink與控制系統(tǒng)仿真.3版[M].北京:電子工業(yè)出版社,2012.
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
