簡(jiǎn)化導(dǎo)航算法在導(dǎo)彈飛行試驗(yàn)安全分析中的應(yīng)用
2014-07-07 15:34:55甄昕丁力軍辛慶偉
海軍航空大學(xué)學(xué)報(bào) 2014年1期
甄昕,丁力軍,辛慶偉
(1.92941部隊(duì);2.92493部隊(duì),遼寧葫蘆島125001;3.海軍航空工程學(xué)院接改裝訓(xùn)練大隊(duì),山東煙臺(tái)264001)
簡(jiǎn)化導(dǎo)航算法在導(dǎo)彈飛行試驗(yàn)安全分析中的應(yīng)用
甄昕1,丁力軍2,辛慶偉3
(1.92941部隊(duì);2.92493部隊(duì),遼寧葫蘆島125001;3.海軍航空工程學(xué)院接改裝訓(xùn)練大隊(duì),山東煙臺(tái)264001)
安全分析是反艦導(dǎo)彈飛行試驗(yàn)前必須開(kāi)展的一項(xiàng)重要工作,安全分析以導(dǎo)彈彈道數(shù)據(jù)為基礎(chǔ),而彈道仿真模型獲取不易。基于此,提出了一種可用于反艦導(dǎo)彈飛行試驗(yàn)安全分析并能取代彈道仿真的簡(jiǎn)化導(dǎo)航算法,對(duì)其實(shí)現(xiàn)原理和實(shí)現(xiàn)方法進(jìn)行了闡述。經(jīng)過(guò)實(shí)踐檢驗(yàn),此種算法計(jì)算簡(jiǎn)單、效率高,其精度滿足導(dǎo)彈飛行試驗(yàn)安全分析要求。
反艦導(dǎo)彈;飛行試驗(yàn);安全分析;威脅概率
靶場(chǎng)進(jìn)行反艦導(dǎo)彈飛行試驗(yàn),首先要選擇試驗(yàn)航區(qū),并且要對(duì)試驗(yàn)航區(qū)內(nèi)或周邊的石油鉆井平臺(tái)、大型島礁以及岸上目標(biāo)可能造成的安全威脅作出評(píng)估,也就是要進(jìn)行所謂的安全分析。
進(jìn)行安全分析必須明確導(dǎo)彈飛行軌跡,也就是要確知導(dǎo)彈的相關(guān)彈道數(shù)據(jù)。目前,從解算導(dǎo)彈彈道角度而言,反艦導(dǎo)彈飛行試驗(yàn)安全分析可分為2種:一種是從研制單位獲取彈道方程及相關(guān)氣動(dòng)參數(shù)進(jìn)行彈道仿真,來(lái)得到導(dǎo)彈飛行軌跡的安全分析方法。此種方法的優(yōu)點(diǎn)是精度高,缺點(diǎn)是彈道仿真模型難以獲取,即使獲取了仿真模型,編程計(jì)算也相當(dāng)繁瑣,不是短時(shí)間能夠完成的[1],而飛行試驗(yàn)安全分析是開(kāi)展飛行試驗(yàn)必不可少的前提性工作,時(shí)間緊迫;另外一種方法即工程近似法,就是本文提出的基于簡(jiǎn)化導(dǎo)航算法來(lái)模擬導(dǎo)彈飛行軌跡的工程近似法。實(shí)踐表明,此種方法易于理解,計(jì)算簡(jiǎn)單,通用性強(qiáng),效率高且精度滿足要求。
1 基本原理
導(dǎo)彈只有在其制導(dǎo)系統(tǒng)的導(dǎo)引下,才有可能飛向目標(biāo),一般反艦導(dǎo)彈在導(dǎo)航坐標(biāo)系確立后,通過(guò)解算導(dǎo)航方程并進(jìn)行相應(yīng)的誤差補(bǔ)償,得出導(dǎo)彈飛行所需的導(dǎo)航信息,如導(dǎo)彈經(jīng)度、緯度、目標(biāo)方位角、導(dǎo)彈姿態(tài)角以及沿3個(gè)方向的加速度、速度等[2-3]。解算導(dǎo)航方程的過(guò)程就是在進(jìn)行彈道計(jì)算,其模型復(fù)雜,計(jì)算繁瑣,輸入、輸出參數(shù)眾多,而在導(dǎo)彈飛行試驗(yàn)安全分析中,一般只需要知道導(dǎo)彈飛行過(guò)程中的位置信息(任一點(diǎn)的經(jīng)緯度和方位角),且輸入?yún)?shù)很少,因而有必要尋找一種能夠較精確解算導(dǎo)彈飛行過(guò)程中位置信息的簡(jiǎn)化導(dǎo)航算法,以提高試驗(yàn)效率。
反艦導(dǎo)彈在地球表面附近運(yùn)動(dòng),實(shí)際上是沿橢球面運(yùn)動(dòng)(地球近似橢球),由于反艦導(dǎo)彈射程較小,飛行高度低,其在空中的運(yùn)動(dòng)軌跡完全可以用參考橢球面上的大地線來(lái)近似[4-5]。
所謂大地線,就是橢球面上2點(diǎn)間的最短線,而且它是唯一的[6]。在理想狀態(tài)下,不進(jìn)行扇面發(fā)射和航路規(guī)劃的反艦導(dǎo)彈在空中的飛行軌跡在橢球面上的投影,應(yīng)該和橢球面上連接導(dǎo)彈發(fā)射點(diǎn)和目標(biāo)點(diǎn)的大地線近似重合[7]。因此,在對(duì)反艦導(dǎo)彈飛行試驗(yàn)進(jìn)行安全分析時(shí),用參考橢球面上的大地線來(lái)近似代替其在空中的運(yùn)動(dòng)軌跡,就是簡(jiǎn)化導(dǎo)航原理的出發(fā)點(diǎn)。
簡(jiǎn)化的導(dǎo)航算法正是基于簡(jiǎn)化導(dǎo)航原理,其核心就是貝塞爾大地問(wèn)題正解公式[8]。
如圖1所示,已知P1點(diǎn)大地坐標(biāo)(L1,B1)及其大地方位角α1,P1點(diǎn)至P2點(diǎn)的大地線長(zhǎng)度為s,N為真北方向。計(jì)算P2點(diǎn)的大地坐標(biāo)(L2,B2)和大地線在P2點(diǎn)的大地反方位角α2,稱為大地問(wèn)題正解。
由球面三角學(xué)可知,球面三角公式都是用角度的三角函數(shù)表示的,球面上距離的大小與解算球面三角形的精度無(wú)關(guān)。又因?yàn)榈厍驒E球的扁率很小,若將其上的諸元素(經(jīng)度、緯度、邊長(zhǎng)及方位角)化為球面上對(duì)應(yīng)元素并均用角度表出時(shí),其對(duì)應(yīng)的用角度表出的改正數(shù)一定是不大的,而且也和距離幾無(wú)關(guān)系。因此,貝塞爾公式解算大地問(wèn)題的基本原理就是按一定的投影條件,建立橢球面上的元素和球面上對(duì)應(yīng)元素間的投影關(guān)系,通過(guò)解算球面三角形的方法而使問(wèn)題得解。用此方法求解,其終點(diǎn)經(jīng)緯度及大地方位角可精確至0.003″,而且適用于長(zhǎng)距離解算,具體計(jì)算公式詳見(jiàn)參考文獻(xiàn)[8]。
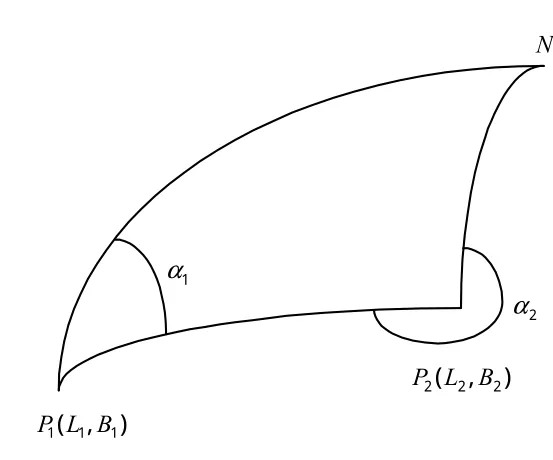
圖1 大地問(wèn)題正解示意圖Fig.1 Positive solution schematic diagram ground question
在反艦導(dǎo)彈飛行試驗(yàn)中,知道了導(dǎo)彈發(fā)射點(diǎn)O的經(jīng)緯度(L0,B0),導(dǎo)彈射向α1,取解算步長(zhǎng)h為100 m,運(yùn)用貝塞爾大地問(wèn)題正解公式不斷進(jìn)行迭代計(jì)算,就可給出導(dǎo)彈飛行軌跡任一位置的經(jīng)緯度(L2,B2)和大地線反方位角α2(迭代時(shí)要將α2換算為大地線方位角),這樣就可以近似模擬導(dǎo)彈飛行過(guò)程中的位置信息。在實(shí)際應(yīng)用過(guò)程中,導(dǎo)彈射程數(shù)百千米,運(yùn)用貝塞爾大地問(wèn)題正解公式經(jīng)過(guò)迭代(h=100 m)解算得到的靶船經(jīng)緯度,與通過(guò)彈道仿真給出的靶船經(jīng)緯度相比,經(jīng)度相差不到2'、緯度相差不到1'(等同于在以研制單位給出的靶船位置為中心、半徑4 km的圓內(nèi)),在精度上能夠滿足導(dǎo)彈飛行試驗(yàn)安全分析的要求。
2 算例分析
假設(shè)某型反艦導(dǎo)彈在O(L0,B0)發(fā)射,射向?yàn)棣?,如圖2所示,已知導(dǎo)彈射程dk,動(dòng)力航程為dl,平均速度為v,試計(jì)算導(dǎo)彈對(duì)陸地威脅概率。
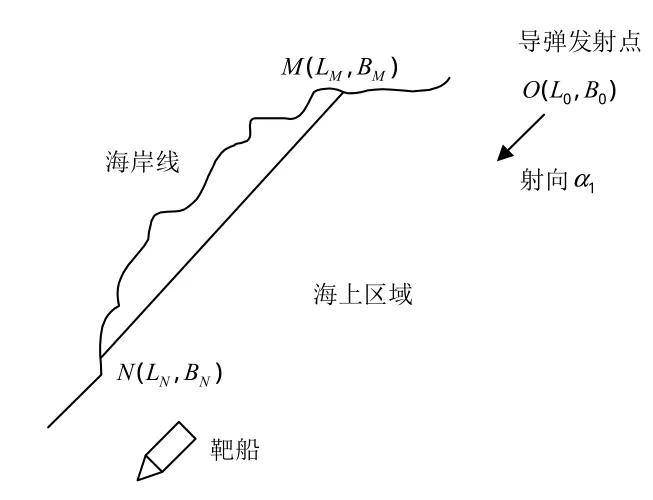
圖2 導(dǎo)彈飛行試驗(yàn)區(qū)域示意圖Fig.2 Regional schematic diagram of missile flying test
假設(shè)反艦導(dǎo)彈只有在導(dǎo)彈故障且安控失效的情況下,才可能對(duì)陸地構(gòu)成威脅。又假設(shè)導(dǎo)彈有2種主要故障模式即失控?zé)o偏墜毀和失控偏航墜毀,只有失控偏航墜毀才能對(duì)陸地構(gòu)成威脅。如果導(dǎo)彈在飛行彈道某點(diǎn)出現(xiàn)故障,失控偏航墜毀導(dǎo)彈的散布服從正態(tài)分布,散布范圍是以導(dǎo)彈射向?yàn)橹行木€的前半圓,不會(huì)對(duì)后方構(gòu)成威脅;從對(duì)陸地最大威脅情況考慮,導(dǎo)彈發(fā)生故障后以100%的概率飛完剩余航程(動(dòng)力航程—已飛距離)。
2.1 建立導(dǎo)航坐標(biāo)系
首先,將導(dǎo)彈彈道上某點(diǎn)的大地坐標(biāo)(L,B,H)轉(zhuǎn)換為地心空間直角坐標(biāo)(x,y,z);再通過(guò)坐標(biāo)平移和轉(zhuǎn)換,可將地心空間直角坐標(biāo)(x,y,z)轉(zhuǎn)換為以此點(diǎn)為原點(diǎn)的導(dǎo)航坐標(biāo)系(X,Y,Z),此坐標(biāo)系X軸與真北所成角度為α,方向指向目標(biāo)一側(cè),Y軸與水平面垂直、向上,Z軸在水平面內(nèi)與X、Y軸成右手法則[9]。它可以近似模擬反艦導(dǎo)彈真實(shí)飛行中的游動(dòng)方位坐標(biāo)系,其在發(fā)射點(diǎn)與導(dǎo)彈發(fā)射坐標(biāo)系重合[10]。
2.2 威脅原理推導(dǎo)
在圖2上沿海岸線上取2點(diǎn)M(LM,BM),N(LN,BN),經(jīng)坐標(biāo)平移和轉(zhuǎn)換后得到M(Z1,X1),N(Z2,X2),見(jiàn)圖3,使直線MN近似代替海岸線。取步長(zhǎng)h=100 m(也可取其他值),則導(dǎo)彈發(fā)射后,彈道上間隔100 m的任一遞推點(diǎn)Ki的大地坐標(biāo)和大地反方位角可由貝塞爾大地問(wèn)題正解公式得到。再經(jīng)過(guò)坐標(biāo)平移和轉(zhuǎn)換,可建立以Ki點(diǎn)為原點(diǎn)的導(dǎo)航坐標(biāo)系。以此坐標(biāo)系原點(diǎn)為圓心,r為半徑畫(huà)圓(r=動(dòng)力航程-已飛距離),如果此圓與直線MN有2個(gè)交點(diǎn),那么導(dǎo)彈可能對(duì)陸有威脅,否則沒(méi)有威脅。
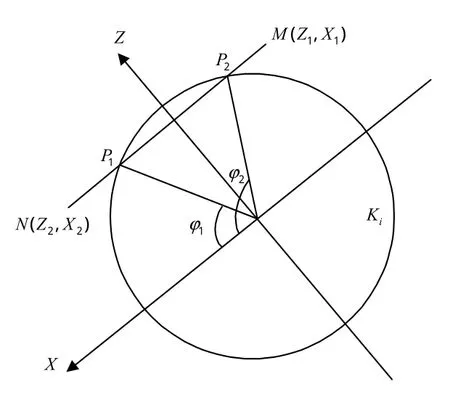
圖3 對(duì)陸威脅概率計(jì)算示意圖Fig.3 Calculation schematic diagram of land threat probability
如圖3所示,經(jīng)推導(dǎo),計(jì)算圓Ki與直線MN交點(diǎn)P1、P2及角度φ1、φ2的公式如下。
直線MN方程:
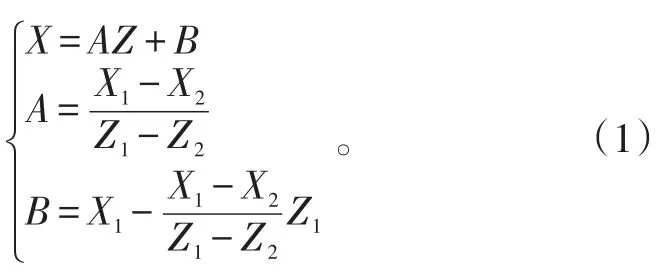
圓Ki方程:

解聯(lián)立方程(1)、(2),可得直線MN和圓Ki的交點(diǎn)P1(F,AF+B)、P2(G,AG+B),且有坐標(biāo)參數(shù)值如下:
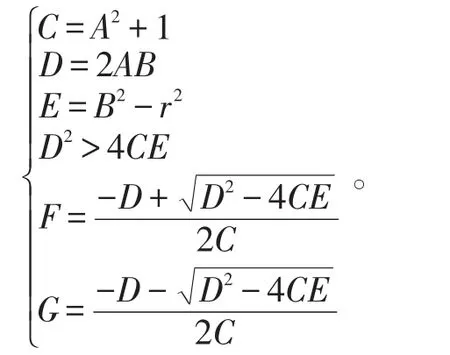
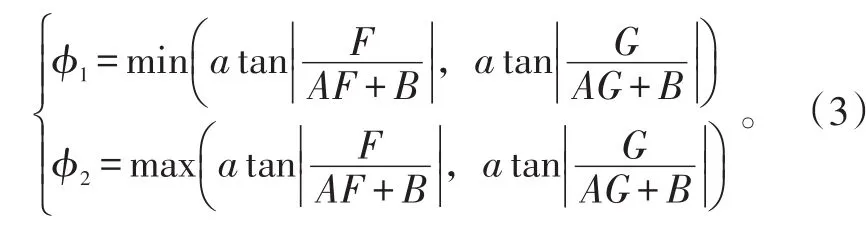
在滿足D2>4CE條件下,有式(3)~(6)成立。
當(dāng)AF+B>0與AG+B>0同時(shí)成立時(shí),有:
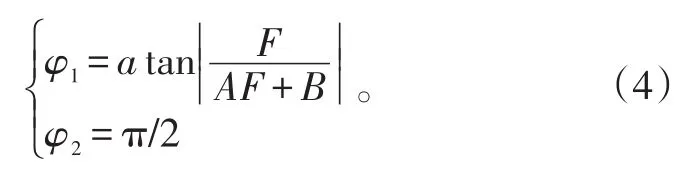
當(dāng)AF+B>0與AG+B≤0同時(shí)成立時(shí),有:
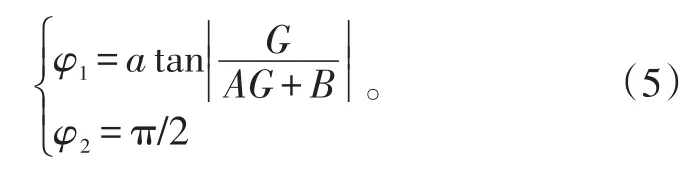
當(dāng)AG+B>0與AF+B≤0同時(shí)成立時(shí),有
當(dāng)AG+B≤0與AF+B≤0同時(shí)成立時(shí),Wi=0(導(dǎo)彈不會(huì)對(duì)陸地造成威脅)。
在D2≤4CE時(shí),圓與直線MN有交點(diǎn)個(gè)數(shù)不超過(guò)1個(gè),Wi=0(導(dǎo)彈不會(huì)對(duì)陸地造成威脅)。
運(yùn)用彈道逐點(diǎn)積分原理(具體原理及若干計(jì)算公式詳見(jiàn)參考文獻(xiàn)[11]),可以得到導(dǎo)彈在Ki點(diǎn)故障落入到陸地的概率Pi。再由導(dǎo)彈在Ki點(diǎn)故障的概率Fi1和安控系統(tǒng)在Ki點(diǎn)失效概率Fi2,則Ki點(diǎn)對(duì)陸地的威脅概率為:Wi=PiFi1Fi2。導(dǎo)彈飛完全程對(duì)陸地的總威脅概率為
計(jì)算導(dǎo)彈對(duì)海上鉆井平臺(tái)和島礁的威脅概率比計(jì)算對(duì)陸威脅概率要簡(jiǎn)單,只要給出鉆井平臺(tái)或島礁的大地坐標(biāo)和它們的半徑數(shù)值,運(yùn)用彈道逐點(diǎn)積分原理就可求得,其坐標(biāo)系的建立和總威脅概率W的計(jì)算公式與對(duì)陸威脅概率計(jì)算一致。
2.3 編程計(jì)算
計(jì)算對(duì)陸威脅概率W的程序框圖見(jiàn)圖4。
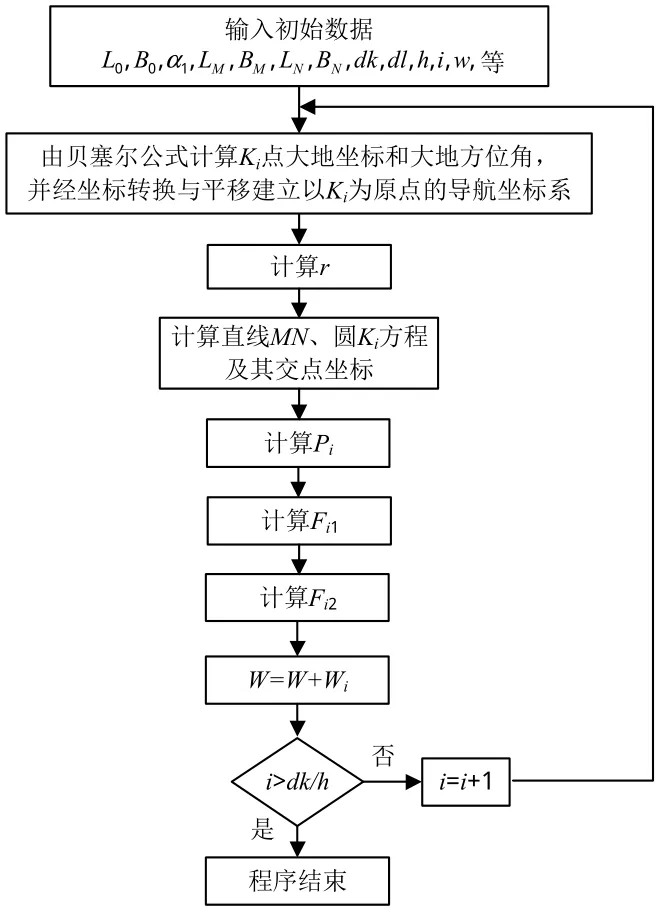
圖4 計(jì)算導(dǎo)彈對(duì)陸威脅概率程序框圖Fig.4 Program diagram of calculation willile land threat probability
以上算例采用Matlab語(yǔ)言只需近百行源程序,且編程計(jì)算方便快捷,結(jié)果精度滿足試驗(yàn)要求,如采用全彈道仿真方法(在獲得彈道仿真模型的前提下)進(jìn)行對(duì)陸地威脅概率計(jì)算,編程計(jì)算就繁瑣得多,至少需近千行Matlab源程序[12],花費(fèi)大量的時(shí)間和人力,其效費(fèi)比要低得多。假設(shè)發(fā)射點(diǎn)經(jīng)緯度為(121.532 7°,41.091 9°),射向?yàn)?56°,步長(zhǎng)100 m,射程290 000 m,,用以上方法編程計(jì)算可得目標(biāo)經(jīng)緯度為(122.876 2°,38.708 9°);用彈道仿真方法得到的目標(biāo)經(jīng)緯度為(122.869 3°,38.692 1°)。經(jīng)計(jì)算2個(gè)目標(biāo)點(diǎn)距離為4 000 m,滿足導(dǎo)彈飛行試驗(yàn)安全分析要求。
3 結(jié)論
如反艦導(dǎo)彈有扇面發(fā)射或航路規(guī)劃,也可用貝塞爾大地問(wèn)題正解公式求解,只是在導(dǎo)彈飛行彈道上選幾個(gè)已知經(jīng)緯度和方位角的轉(zhuǎn)折點(diǎn),將原來(lái)一條大地線變?yōu)閹讞l首尾相連的大地線就可以了。采用以貝塞爾大地問(wèn)題正解公式為核心的簡(jiǎn)化導(dǎo)航算法,只要知道導(dǎo)彈發(fā)射點(diǎn)經(jīng)緯度、導(dǎo)彈射向、目標(biāo)點(diǎn)經(jīng)緯度就可以進(jìn)行導(dǎo)彈飛行位置信息模擬,并通過(guò)彈道逐點(diǎn)積分方法進(jìn)行導(dǎo)彈威脅概率解算,可得到精確滿足要求安全分析結(jié)果,這是一種可行的工程近似方法。
[1]王精業(yè).仿真科學(xué)與技術(shù)原理[M].北京:電子工業(yè)出版社,2012:6-56. WANG JINGYE.Science and Technology Theory of Simulation[M].Beijing:Electronic Industry Press,2012:6-56.(in Chinese)
[2]楊軍.導(dǎo)彈控制原理[M].北京:國(guó)防工業(yè)出版社,2010:2-15 YANG JUN.Missile control theory[M].Beijing:The National Defense and Industry Press,2010:2-15.(in Chinese)
[3]潘榮霖.飛航導(dǎo)彈自動(dòng)控制系統(tǒng)[M].北京:宇航出版社,1991:56-59. PAN RONGLIN.Missile auto control system[M].Beijing:Aero space Press,1991:56-59.(in Chinese)
[4]德米特里耶夫斯基.外彈道學(xué)[M].韓子鵬,譯.北京:國(guó)防工業(yè)出版社,2000:9-35. DMITRIYEVSKIY.The outer ballistic theory[M].Traslated by Han Zipeng.Beijing:The National Defense and Industry Press,2000:9-35.(in Chinese)
[5]孔祥云,郭際明,劉宗泉.大地測(cè)量學(xué)基礎(chǔ)[M].武漢:武漢大學(xué)出版社,2010:6-69. KONG XIANGYUN,GUO JIMING,LIU ZONGQUAN. The base theory of the ground measuring[M].Wuhan:Wuhan University Press,2010:6-69.(in Chinese)
[6]胡明城.現(xiàn)代大地測(cè)量學(xué)理論及其應(yīng)用[M].北京:測(cè)繪出版社,2003:12-23. HU MINGCHENG.The modern theory and application of the ground measuring[M].Beijing:Measuring Press,2003:12-23.(in Chinese)
[7]韓子鵬.彈箭外彈道學(xué)[M].北京:北京理工大學(xué)出版社,2008:4-41. HAN ZIPENG.Outer ballistic theory of missile and rocket [M].Beijing:Beijing Theory and Industry University Press,2008:4-41.(in Chinese)
[8]朱華統(tǒng),黃繼文.橢球大地計(jì)算[M].北京:解放軍出版社,2001:79-84. ZHU HUATONG,HUANG JIWEN.The computation of the ground of the elliptic sphere[M].Beijing:PLA Press,2001:79-84.(in Chinese)
[9]羅建軍.組合導(dǎo)航原理及應(yīng)用[M].西安:西北工業(yè)大學(xué)出版社,2012:3-11. LUO JIANJUN.The Theory and Application of Composed Navigation[M].Xi'an:North West Industry University Press,2012:3-11.(in Chinese)
[10]孟秀云.導(dǎo)彈制導(dǎo)與控制系統(tǒng)原理[M].北京:北京理工大學(xué)出版社,2003:3-43. MENG XIUYUN.The missile guidance and control system theory[M].Beijing:Beijing Theory and Industry University Press,2003:3-43.(in Chinese)
[11]曲寶中,孫曉峰,李守秀.海軍戰(zhàn)術(shù)導(dǎo)彈試驗(yàn)與鑒定[M].北京:國(guó)防工業(yè)出版社,2006:223-227. QU BAOZHONG,SUN XIAOFENG,LI SHOUXIU.Navy tactical missile test and evaluation[M].Beijing:The National Defence and Industry Press,2006:223-227.(in Chinese)
[12]DAVID ALLERTON.飛行仿真原理[M].劉興科,譯.北京:電子工業(yè)出版社,2012:8-26. DAVID ALLERTON.Flying simulation theory[M].Translated by LIU XINGKE.Beijing:Electronic Industry Press,2012:8-26.(in Chinese)
Application of Simplified Navigation Algorithm for the Safety Analyss During the Missile Flying Test
ZHEN Xin1,DING Li-jun2,XIN Qing-wei3
(1.The 92941stUnit of PLA;2.The 92493rdUnit of PLA,Huludao Liaoning 125001,China;3.Training Brigade of Equipment Acceptance and Modification,NAAU,Yantai Shandong 264001,China)
Safety analysis is an important task that must be finished before launching anti-ship missiles.The missile ballistic simulation data is the basic part for the safety analysis,but the missile ballistic simulation is difficult for us to complete. Because of this,a kind of simplified navigation algorithm for the safety analysis in the anti-ship missile flying test was put forword,and its principle and method was elaborated in this paper.This algorithm had some advantages such as simple computation,high efficiency.The result of its actual application was satisfied with the safety analysis in the anti-ship missile flying test.
anti-ship missile;flying test;safety analysis;threat probability
TJ760.6+28
A
1673-1522(2014)01-0005-04
10.7682/j.issn.1673-1522.2014.01.002
2013-10-10;
2013-11-25
甄昕(1970-),男,高工,大學(xué)。
