層次化UML狀態機在拆裝過程仿真中的應用
2014-07-09 01:17:28陳靜杰李會茹曾學鋒
圖學學報 2014年3期
關鍵詞:模型
陳靜杰, 李會茹, 曾學鋒
(1. 中國民航大學航空自動化學院,天津 300300;2. 北京飛機維修工程有限公司,北京 100621)
虛擬拆裝是民航飛機維修培訓中的一個重要環節,對民航維修人員熟悉工作,提高拆裝效率具有重要意義。目前,對虛擬拆裝研究[1-4]主要集中在零部件拆裝次序和拆裝關系的建模,其實質是將零部件作為一個質點的虛擬拆裝。文獻[5]中介紹了對虛擬拆裝過程進行建模的分析,采用PERT圖建立拆裝過程模型,但模型中缺少工具約束。與真實操作中的要求不相符。文獻[6]中對UML狀態機的形式化語義進行了研究,定義了狀態項代數和配置函數,可以求出在任一時刻UML狀態機的狀態配置。這種方法滿足組合性,但是沒有進一步進行形式化驗證。以上拆裝過程建模存在一些不足,例如,沒有對拆卸零部件的狀態遷移和行為進行描述,一般的工作流模型缺乏對拆卸過程中約束條件和拆卸過程層次化建模的考慮。
基于此,針對已有虛擬拆裝過程模型的不全面,本文結合UML狀態機和層次化分析法描述拆裝過程的建模。文中利用狀態機表示零部件拆裝過程中的狀態變換形式,遷移條件。應用層次分析法將復雜問題中的各種因素劃分為相互聯系的有序層次化模型的方法,建立層次化模型序列,采用多線程數據采集,跟蹤待拆的零部件。
1 維修任務的拆裝過程建模
維修任務中有多道工序,主要包括測試、排故與拆裝。本文研究基于3D仿真場景中的組件拆裝過程仿真。分析拆裝過程中零部件狀態變遷的條件,建立零部件的關系網。直觀形象表達出各個零部件的狀態轉換。
1.1 UML狀態機建模
本研究中應用UML完善的功能表達性和完備的定義[7]描述零部件拆裝過程。用狀態(state)描述待拆零部件的存在狀態,變遷表示零部件在兩個狀態之間的遷移。
事件表示對零部件施加的外界條件,動作表示對零部件的運動仿真,監護條件為布爾函數,只有為true時,狀態才能遷移。
定義1:UML狀態機的狀態和遷移N=(P,T,E,G,A)
P表示零部件的狀態集,T表示狀態變遷集,E表示變遷的事件,G表示監護條件,A為具體動作的描述。圖1描述某個零部件狀態遷移的過程,其中Ps表示零部件的初始狀態,經過變遷后到達最終狀態Pt。變遷弧上條件表示在發生事件E(在拆裝中表示拆卸或安裝的工具和設備的到達條件)后,監護條件的變量為真,發生變遷的動作A,到達狀態Pt。其中A表示零部件的運動表示(平移,螺旋,旋轉等)。

圖1 狀態遷移圖
1.2 零部件間的約束關系
每一個待拆卸的組件由多個零部件組成,用數學表達式表示:

其中x是待拆的零部件。零部件之間的約束關系可以總結為下圖2中的4種:一對一約束、一對多約束、多對一約束和多對多約束。設xi,xj… xj∈X,則編號為i,j,k,m,n的零部件之間的關系表示為: Ρ (xi,xj) = R(xk,xm,xn)。

圖2 零部件約束關系圖
1.3 零部件拆卸過程建模
拆卸過程模型包含 7個元素:Ni={P,F,T,E,G,A,X },其中,P為庫所集,T為變遷集,F為狀態和變遷連接關系的有向弧集。dom(F)為F的定義域,cod(F)為F的值域。
sP表示零部件的原狀態,tP表示目標狀態,E表示變遷的事件,G表示監護條件,A為具體動作的描述,T表示狀態變遷集,K表示零部件狀態集,X表示拆卸零部件與相連零部件之間的關系表示。在此模型中,可以清晰的定義狀態和轉換。實現狀態轉換的模塊化描述。圖3為一個零部件的狀態和遷移過程描述。圖中,零部件B、C、D是A的前置條件,零部件B、C、D可并行操作。其中P1表示零部件B的拆卸狀態,P2表示零部件C的拆卸狀態,P3表示零部件D的拆卸狀態。T1,T2,T3分別表示零部件C、D、B的狀態遷移過程。T4表示零部件A在解除零部件B、C、D的約束后,進行狀態遷移到達狀態P4。

圖3 零部件拆卸過程圖
2 拆裝模型層次化[8]
UML狀態機具有直觀清晰,包含信息量大的特點,但是對于多個零部件組成的復雜的飛機組件而言,只使用UML狀態機模型表示,會使模型龐大,造成建模效率低。本文引入層次分析法[9-10],將復雜的拆裝過程,進行層次分解,條理結構清晰的建立組件的拆裝過程模型。在同一層次的各要素關系平等,不存在顯著的相關性;最低層的指標可以被量化。把組成復雜的組件根據拆卸的相關性和并行性,分解成不同的層次(如圖4)。
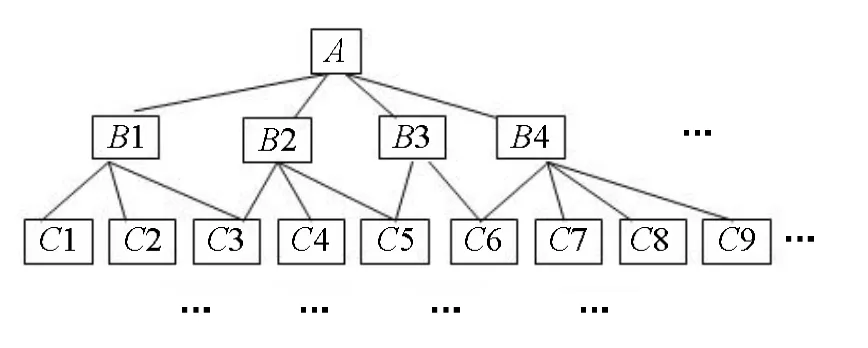
圖4 拆卸零部件分層圖
飛機組件的拆卸一般分為三大部分:進入飛機維護構型、進近程序和拆卸操作。下面對拆卸操作建立層次化模型。
在應用層次分析法時,頂層表示待拆的組件,第二層表示只要選取了合適的工具或設備便可以直接進行拆卸的零部件(或者是零部件序列)。第三層表示,在第二層的零部件拆卸后,才可能進行拆卸操作的零部件,第三層的零部件可能受第二層一個或者多個零部件的約束。處于第二層的零部件可以進行并行操作。處于第三層的零部件在滿足與其相連的第二層的所有零部件拆卸完成后,才能進行拆卸操作(根據需要確定建立層次數,本文以三層為例)。
在層次分析法中,給位于最低層的每一個零部件設置一個標志位,待拆狀態(初始狀態)時為零,應用層次分析法,給位于底層的零部件計算出狀態標志值Si,待相應拆卸完成后,對應的零部件標志值從初始狀態零變成Si。當標志拆卸過程完成。
位于層次圖中的每一節點,代表組件的一種當前狀態。
層次分析法的應用步驟:
(1)第二層按照B1,B2,…Bn編號;第三層按照C1,C1…Cn;以此類推。按照建立的層次結構模型建立判斷矩陣,設頂層元素A與下一層B1,B2,…Bn有關,判定矩陣的形式如下所示。
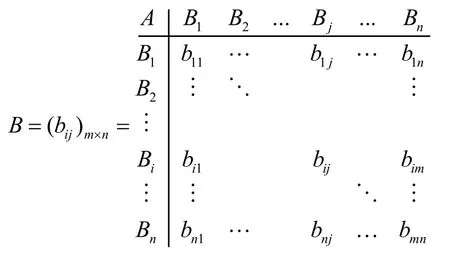
bij表示相對A來講,bi和bj與A關系的緊密度。采用1,2,3…9或者其倒數作為度量的參照。
(2)對判定矩陣的每一列做歸一化計算:

(3)同理第三層(C1,C2,C3…)的零部件,分別對每個父結點下的零部件建立判斷矩陣這里的x,y,x表示零部件的編號,
n為同一父節點的子節點個數。見步驟(1)和(2),
(4)將計算得到的第三層的所有的歸一化矩陣值,進行全局的歸一化處理。與父節點沒有連接的零部件歸一化值置為0,見式(1)。

(m為C層元素的個數, Wcη|m×1為Wcη|的擴展矩陣,E1×m為1的列陣)
對新建立的新方陣的元素做歸一化運算,見式(2)。
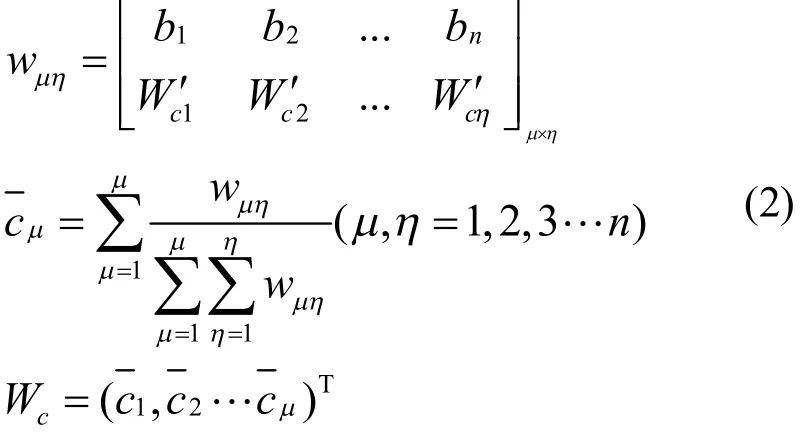
根據Wc計算得到 C層的零部件的狀態標志值,隨著拆卸的進行,模型標志從初始狀態零,置為計算得到的值Si。時,組件拆卸完成。根據每個標志值的到達可以判定相應的零部件是否完成拆卸,達到實時監測的效果。
3 仿真實例
基于上述研究構建的層次化UML狀態機建模方法,應用在基于OSG的3D虛擬設備維修平臺上[11],對A320飛機電子設備艙中電瓶的拆裝過程進行仿真分析。
步驟一,分析電瓶拆卸過程。第一部分為飛機維護構型;第二部分為進近程序,包括打開822電子艙門和斷開相應跳開關;第三部分為拆卸過程。步驟二,對電瓶的拆卸工作分為可并行操作的3個元素(每個元素中包含了要求順序操作的零部件集):供電(包括滾花螺帽,盲蓋,電源固定保險絲);通風(包括通風管道,卡箍,堵蓋);電瓶的固定(包括兩個翼型螺帽,兩個桿,固定保險絲)。
3D渲染場景在拆裝進行前加載完畢,選取工作平臺準備進入電子設備艙開始電瓶的拆裝。圖5中H表示歷史狀態,即飛機處于維護構型,供電給勤務網絡,駕駛艙中BAT 1的按鈕電門彈起,在頂板35VU上放置警告裝置;打開822電子艙,斷開 5PB1、12PB1的按鈕電門。開始電瓶的拆卸操作,首先將電瓶的拆裝工作分成3部分(通電部分、通風部分、固定部分),每部分可以并行操作。P1描述 822電子艙門打開的狀態,P2描述跳開關斷開的狀態;T1,T2,T3,T4描述固定裝置的拆開過程,T1描述用工具剪鉗剪斷固定用的保險絲的過程,T2描述用手旋轉翼型螺帽,翼型螺帽螺旋式上升至固定桿頂端的操作,T3描述用手抬高墊片的操作,T4描述用手側向搬開固定桿的操作。P3,P4,P5,P6描述固定裝置的組成零部件完成相應操作后的狀態。T5,T6,T7,T8描述通電部分的拆開過程,T5描述用工具剪鉗剪斷固定用的保險絲的過程,T6描述用手旋轉電源插頭的操作,T7描述用手將電插頭從電瓶上移除的操作,T8描述用手將盲蓋安裝在電瓶上的操作。P7,P8,P9,P10描述通電部分的組成零部件完成相應操作后的狀態。T9,T10,T11描述通風管路部分的拆開過程,T9描述用扳手擰松卡箍的過程,T10描述用手將通風管移開的操作,T11描述用手將堵頭安裝到通風管上的操作。P11,P12,P13描述通風部分的組成零部件完成相應操作后的狀態。安裝是拆卸的逆過程,這里沒有敘述。圖6是電瓶拆卸操作的部分效果圖。

圖5 電瓶的拆卸過程及建模

圖6 電瓶拆卸效果圖
4 結 束 語
本文對虛擬維修拆裝過程建模進行了研究,結合UML狀態機和層次分析法建立了飛機組件的拆裝過程模型,并將這種模型應用于基于OSG的三維虛擬維修設備平臺上,對組成復雜的組件采用層次分析法規劃零部件的拆卸,規范了拆裝過程建模的流程,解決了飛機虛擬維修訓練設備中大量組件的統一建模問題,且利用層次分析法能動態監測拆裝過程中的零部件。利用UML狀態機仿真零部件的拆裝過程中狀態的變遷,真實再現零部件的拆卸過程。此維修訓練設備已應用于某高校的機務維修訓練中,提高受訓人員的拆裝熟練度和操作能力。
[1] 蔣雙雙,劉鵬遠,張錫恩. 一種基于Petri網的虛擬維修過程建模方法[J]. 系統仿真學報,2007,19(11):2488-2491.
[2] 于鵬飛,時和平,芮科慧. 基于動作對象的虛擬維修動作仿真方法研究[J]. 裝備指揮技術學院學報,2009,20(5): 127-131.
[3] 任洪麗,張 偉,李文瑞. 基于改進蟻群算法UML狀態機圖的測試用例生成[J]. 計算機工程與設計,2010,31(17): 3835-3837,3928.
[4] 郭 峰,姚淑珍. 基于Petri網的UML狀態圖的形式化模型[J]. 北京航空航天大學學報,2007,33(2):248-252.
[5] 尚 潔,容曉峰,徐興華. 基于PERT圖的虛擬拆裝過程建模[J]. 計算機與數學工程,2011,39(3):151-154.
[6] 姚淑珍,金茂忠. UML 狀態圖的形式化建模及其分析[J]. 北京航空航天大學學報,2007,33(4): 472-476.
[7] 蔣 慧,林 東,謝希仁. UML狀態機的形式語義[J]. 軟件學報,2002,13(12): 2244-2250.
[8] Zhou Y,Baresi L,Rossi M. Towards a formal semantics for UML/MARTE state machines based on hierarchical timed automata [J]. Journal of Computer Science and Technology,2013,28(1): 188-202.
[9] 王偉巖,馬 野,邱楚楚. 基于改進層次分析模型的艦載無人機系統修理級別分析研究[J]. 艦船電子工程,2011,31(4): 143-146.
[10] 荊全忠,姜秀慧,楊鑒淞,周延峰. 基于層次分析法(AHP)的煤礦安全生產能力指標體系研究[J].中國安全科學學報,2006,16(9): 74-79,145.
[11] 劉家學,劉 濤,耿 宏. 基于Petri網和語義網絡的虛擬維修過程建模與應用[J]. 圖學學報,2013,34(2): 113-118.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19