基于Gaussian-Hermite矩的圖像局部特征描述與匹配研究
2014-07-11 13:42:26張朝鑫
圖學學報 2014年3期
張朝鑫, 席 平
(北京航空航天大學機械工程及自動化學院,北京 100191)
圖像局部特征描述是圖像處理與計算機視覺領域的研究熱點[1-3]。圖像局部特征描述是指用一定的方法描述圖像特征點周圍一片區域的特征信息。描述方法要使得相同特征或相同場景的描述盡可能的一致,而不同的特征或不同場景的描述差異性盡可能的大。近幾年,有很多圖像的特征描述方法被提出。這些方法主要可以分為三類:基于濾波的方法[4-5]、基于矩的方法[6-7]與基于像素分布的方法[8-9]。其中基于像素分布的方法被應用較多,尤其是 SIFT[10]與形狀上下文[11]。Chen和Sun[6]認為基于Zernike矩的描述子同樣具有很強的特征描述能力,甚至在一些條件下比SIFT還優秀。但是Zernike矩也有一些缺點,由于Zernike矩中存在階乘運算,因此在計算Zernike矩變得耗時,達不到實時性需求,另外Zernike描述子使用較高階的矩,數字穩定性較差。
本文提出一種基于多尺度的Gaussian-Hermite(GH)矩的特征描述方法。首先使用GH矩的旋轉不變矩,解決了相同場景的圖像因為旋轉計算結果不一致性的問題。其次,由于GH矩中存在尺度因子,同時尺度因子的選擇并不影響旋轉不變矩的旋轉不變性,選用多個尺度因子進行計算,提出多尺度的GH矩描述子。最后通過實例與現有的方法,包括 SIFT與Zernike,進行了詳細的評估比較。比較結果表明,基于GH矩的描述子具有更強的特征表述能力。
1 GH矩及其不變矩
1.1 GH矩
給定圖像函數f(x,y),GH矩的定義:

其中,Φm,n(x, y ;σ)為GH矩的基函數:
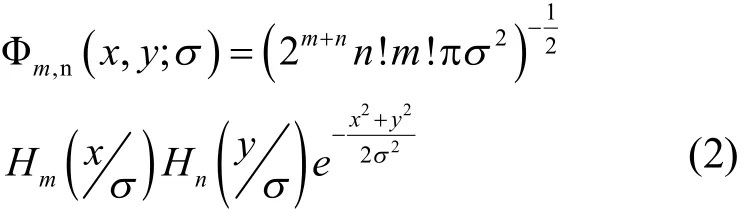
其中,m和n是非負整數,Hm(x)和Hn(x)分別是m次和n次Hermite多項式。
圖1給出了GH矩前5階矩的基函數的灰度圖像。
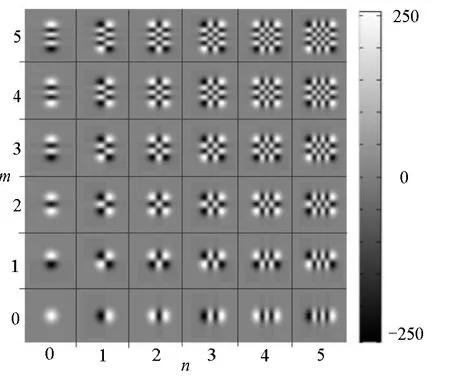
圖1 GH矩的前5階矩的基函數
由定義可知,GH矩是由圖1中GH矩的基函數與圖像進行卷積運算得到。
1.2 離散形式
GH 矩是定義在連續區間(-∞,∞)上的。GH矩中存在尺度因子σ,在計算矩之前應先設定好大小。對于不同大小的圖像,為了更方便設定尺度因子,應把圖像坐標轉換到一個固定的區間里。因此,根據通常的使用習慣選擇區間[-1,1],即,對于一個定義在區間[0≤i ,j≤K-1]上的數據圖像I(i,j),圖像坐標首先通過下面的公式進行轉換:

那么,定義在圖像I(i, j)上m+n階的GH矩就可以通過以下公式計算:

1.3 旋轉不變矩
所謂旋轉不變矩是指圖像旋轉任意一個角度后,計算得到的矩的值與旋轉之前是一致的。為了推導旋轉不變矩,應把GH矩推廣到極坐標下,定義Polar-Gaussian-Hermite(PGH)矩為[12]:

其中基函數定義為:

其中,Bp,q(r)是一組多項式,稱為Polar-Hermite多項式。具有以下遞推關系:

對角多項式的遞推關系:

PGH矩與GH矩有以下關系:

給定矩的階數,由式(9)和式(10)可以推導了GH矩的旋轉不變矩的獨立完備集,如果出現復數矩,實數部分與虛數部分分開,各自組成旋轉不變矩。其中5階矩以下的不變矩共18個。以下給出2階與3階的旋轉不變矩的形式,共6個。

2 基于GH矩的圖像局部特征描述方法
2.1 尺度因子與旋轉不變矩
由式(4),GH 矩中有一個尺度因子σ,在計算之前應設定好尺度因子的大小。尺度因子的選擇會不會影響旋轉不變矩的旋轉不變性呢?下面通過計算一對旋轉圖像的不變矩分析尺度因子與旋轉不變性的關系。
如圖2所示,為“大猩猩”原圖與其旋轉45°后的圖像。尺度因子大小以 0.01為單位從 0.03增加到1.43,分別計算兩幅圖像的前5階18個旋轉不變矩,得到的兩幅圖像旋轉不變矩的比值隨尺度因子的變化規律記錄在圖3中。

圖2 “大猩猩”原圖與旋轉45°后的圖像

圖3 不同尺度因子對18個旋轉不變矩的影響
從圖中可以看出,隨著尺度因子由小到大變化,兩幅圖像旋轉不變矩的比值基本穩定在1左右,但是同時會出現波動,甚至在特定的尺度因子下會出現較大幅度的跳動。通過分析,出現波動現象是由于數字圖像是離散的所造成的誤差;而出現某個特定的尺度因子下較大范圍的跳動,是由于在計算不變矩過程中,多項式乘積的其中一項出現無限接近0值造成較大的位數損失。除了這些由計算機與離散化造成的誤差外,可以得出以下結論:尺度的大小不影響GH矩旋轉不變矩的旋轉不變性。
2.2 GHM描述子
首先,與Zernike矩需進行階乘運算相比,GH矩計算相對簡單,能滿足實時性要求;其次,由上節分析,尺度因子選擇不影響GH矩旋轉不變矩的旋轉不變性,因此可以選擇低階矩,每個不變矩選擇多個度因子,來構成描述子,解決高階矩相對噪聲不穩定的問題;再次,GH矩是正交矩,具有很強的特征描述能力。基于這些優點,設計基于 GH矩的圖像局部特征描述子,稱為GHM描述子。
為了避免高階矩的數字穩定性差,選擇5階矩以下的旋轉不變矩,共 18個,然后,對每一個不變矩選擇7個不同大小的尺度因子,那么一共可以組成18×7共128維向量的描述子。這就組成了基于GHM矩的描述子。
GHM描述子的具體構造方法可以概括為:
(1)選擇7個尺度因子,分別為:σ=0.1,0.2,0.4,0.6,0.8,1.0,1.2;
(2)使用式(4)計算圖像前5階的GH矩;
(3)計算18個旋轉不變矩,由于每個旋轉不變矩有7個尺度因子,共得到128維的向量:

這128維向量V即為圖像的GHM描述子。
通過分析,GHM描述子具有以下優點:
(1)實現過程簡單,計算時間快;
(2)因為使用低階矩,對噪聲相對不敏感;
(3)正交矩,描述能力強。
用GHM描述子計算得到特征向量之后,可以用歐式距離進行特征點之間的比較。距離最小或小于一定的閾值,認為是正確的匹配,即表示相同特征。歐式距離公式為:

3 實例分析
本節將通過實例評估所提出的描述子與現有的描述子的特征表述能力。參與評估的描述子有:SIFT、基于Zernike的描述子ZM、復數矩(complex filter)、形狀上下文(shape context)。主要從以下幾個方面來評估:圖片的不同光學變化(模糊、光照、JPEG壓縮)與不同的幾何形變(旋轉、縮放、平移、視角變換)。如圖4,5種不同變換的圖像用于評估,圖像的來源是文獻[13]。評估之前,需要選擇一種合適的特征點檢測方法,先從圖像中檢測出相同的特征點與特征點周圍相關區域,從而再用 5種不同的描述子來計算特征向量。本實例選擇 MSER特征點檢測方法。

圖4 5種不同變換的圖像
3.1 效果評估方法
我們用正確率-完整率(precision-recall,PR)曲線來評估最后的匹配效果。其中正確率是指正確的匹配個數與所有匹配個數的比值,那么對應的錯誤率為:

完整率是指正確的匹配個數與所有應該匹配的個數,即:

如圖5所示,描述了PR曲線的產生過程。假設兩張圖像上分別提取M與N個特征點,那么這兩幅圖像之間將有M×N個匹配對。在這些匹配對中,其中有一些是正確的匹配(圖中用圓表示),另一些是錯誤的匹配(圖中用方形表示),按匹配對之間的距離大小排列開來,即圖中的橫軸代表匹配對之間的距離,則有一部分區域是正確匹配對與錯誤匹配對重疊的區域。當所設定的距離閾值Dt從 Dmin開始逐漸增大,正確的匹配對逐漸多起來,當碰到錯誤匹配對后,錯誤率從0逐漸增大,當距離閾值到達Dmax的時候,錯誤率趨近于1。注意到,錯誤率整體是遞增的,但在剛開始階段,錯誤率有可能降低。完整率是從0單調遞增的,當距離閾值到達所有應該匹配數后,完整率為1。
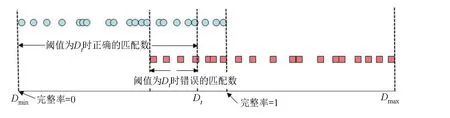
圖5 PR曲線產生過程
3.2 實例結果分析
本實例對比了5種狀態下的GHM描述子的匹配效果。①模糊,圖像的模糊來自相機聚焦的不同,圖6(a)給出了圖4(a)圖像模糊情況下5種描述子的PR曲線,從圖可以看出,GHM的曲線比其他曲線要高,即匹配效果更好。②JPEG壓縮,圖6(b)給出了圖4(b)中在JPEG圖像壓縮后的5種描述子的PR曲線,從圖中可以看出,匹配效果最好的是ZM描述子,其次是GHM與復數矩。在JPEG壓縮的情況下,基于矩的方法普遍比其他兩種方法要優秀。③光照變化,圖4(c)是兩張在不同光照條件下拍攝的圖片,圖6(c)給出了5種不同描述子的匹配效果,從圖中看來,SIFT,GHM,ZM 三種描述子表現基本相當。④不同視角,圖4(d)是一對相同場景但是從不同角度拍攝的圖像,圖6(d)給出了5種描述子的PR曲線,從曲線可以看出,GHM描述子表現最為優秀,錯誤率在0.2以下的完整率是最高的,而ZM表現非常一般。⑤旋轉與縮放,圖 4(e)是一對經過旋轉并縮放的圖像,圖 6(e)是 5種描述子的匹配結果,從結果可以看出,GHM描述子依舊是表現最有優秀,完整率始終都是處在最高的位置,其次是SIFT,而ZM表現一般。
從5種不同情況的圖像匹配結果可以看出,所提出的GHM描述子表現非常出色,在5種不同變換情況下匹配效果都處在前列,甚至在一些情況下還超越了SIFT描述子。實例結果體現了GHM 描述子的優越性,具有非常強的特征描述能力。
4 結 論
本文詳細介紹了GH矩及其旋轉不變矩,提出了基于GH矩的旋轉不變矩的圖像局部特征描述方法。并且通過實例與現有的方法進行詳細的比較,實例結果表明,基于GH矩的圖像特征描述方法與現有的方法相比具有更強的圖像特征表述能力。

圖6 不同圖像對匹配結果
[1] Yang Xin,Cheng Kuangting. Local difference binary for ultra-fast and distinctive feature description [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2013,36(1): 188-194.
[2] Miksik O,Mikolajczyk K. Evaluation of local detectors and descriptors for fast feature matching[C]//Recognition(ICPR). Pattern 2012 21st International Conference on Pattern Recognition (ICPR). Tsukuba,Japan,2012: 2681-2684.
[3] Mikolajczyk K,Schmid C. A performance evaluation of local descriptors [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10):1615-1630.
[4] Freeman W T,Adelson E H. The design and use of steerable filters [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1991,13(9):891-906.
[5] Schaffalitzky F,Zisserman A. Multi-view matching for unordered image sets,or “How do I organize my holiday snaps?”[J]. Computer Vision,2002,2350:414-431.
[6] Chen Zen,Sun Shukuo. A zernike moment phase-based descriptor for local image representation and matching [J].IEEE Transactions on Image Processing,2010,19(1):205-219.
[7] Papakostas G A,Koulouriotis D E,Karakasis E G,Tourassis V D. Moment-based local binary patterns: A novel descriptor for invariant pattern recognition applications [J]. Neurocomputing,2013,99:358-371.
[8] Bay H,Tuytelaars T,Van Gool L. Surf: Speeded up robust features [J]. Computer Vision,2006,3951:404-417.
[9] Van De Sande K E,Gevers T,Snoek C G. Evaluating color descriptors for object and scene recognition [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(9): 1582-1596.
[10] Lowe D G. Distinctive image features from scale-invariant keypoints [J]. International Journal of Computer Vision,2004,60(2): 91-110.
[11] Belongie S,Malik J,Puzicha J. Shape matching and object recognition using shape contexts [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(4): 509-522.
[12] 張朝鑫,席 平,胡畢富. Gaussian-Hermite矩旋轉不變矩的構建[J].北京航空航天大學學報,2014,40(9): 1000-1005.
[13] http://www.robots.ox.ac.uk/-vgg/research/affine/,2013-12-1.
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
河南科技(2014年23期)2014-02-27 14:19:15
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37