采用高拋彈道的空空導彈復合導引律研究*
2014-07-10 08:29:32夏芒張忠陽杜廣宇
現代防御技術 2014年1期
夏芒,張忠陽,杜廣宇
(北京電子工程總體研究所,北京 100854)
0 引言
現代戰爭是信息化條件下的高技術戰爭,制空權的爭奪已成為奪取戰爭勝利的關鍵所在。由于空空導彈在中遠程精確打擊、奪取制空權中的重要地位和作用,它在現代戰爭中扮演著越來越重要的角色[1]。研究表明提高導彈飛行高度,利用高空大氣稀薄的特點減小飛行阻力可以大幅增加射程[2]。采用高拋彈道導引律在不改變導彈基本參數的情況下對空空導彈進行增程被認為是有效可行的。
1 導引律
中遠距空空導彈由于飛行時間長,距離遠,其導引律通常分為初段、中段和末段3個制導段。各段飛行性能指標與制導信息來源不同,所選擇的制導律也不同。
1.1 初制導導引律
初制導段采用程序控制,它通過載機探測的目標信息結合導彈自身性能指標預測命中點,目的是使導彈獲得有利的預置彈道傾角θopt和偏角ψopt。

(1)
1.1.1 水平面內的預置角計算
導彈預置角是根據預測命中點計算而來的,其在水平面內的運動情況如圖1所示。以目標速度方向的反向為Ox軸,目標視線在水平面內的投影與Ox軸負向的夾角稱為進入角,記為q0。假設導彈速度vm對準目標發射,則發射時的彈道偏角ψv0=q0。圖1所示命中點的位置(xG,yG,zG)用如下公式估算[3]:
(2)
式中:(xt,yt,zt)為目標初始位置;vt,θt,ψvt分別為目標的速度、彈道傾角和彈道偏角;tup為預測飛行時間。
對于中遠距空空導彈來說高度變化量遠小于水平距離變化量,因此tup的計算公式為
(3)


圖1 水平面內導彈目標相對運動Fig.1 Relative motion between missile and target in horizontal plane
為了使彈道平直,初制導段內導彈在水平面內轉過一個預置角,使其速度方向指向預測命中點。圖中ψv1即為初制導結束時的彈道偏角,由圖得到預置角ψopt的計算表達式為
ψopt=ψv1-ψv0.
(4)
而ψv1的計算如下:

(5)
式中:(xm,ym,zm)為導彈發射時刻位置。
1.1.2 鉛垂面內的預置角計算
導彈在鉛垂平面內的運動情況如圖2所示,它將在初制導段內獲得預置拋射角θopt。

圖2 鉛垂面內導彈目標相對運動Fig.2 Relative motion between missile and target in vertical plane
導彈的預置角計算公式為[3]
(6)

(7)
1.2 中制導導引律
中制導段采用比例導引律[4]
(8)
式中:k1=3;k2=3。
對于初制導和中制導導引律都是在彈道坐標系中得到的,其對應的彈道系過載為[5]
(9)
1.3 末制導導引律
末制導段采用自適應滑模制導律,其在彈道坐標系中的需用過載為[6-10]
(10)


要實現自適應滑模制導律,必須對目標加速度進行估計。為此畫出三維空間的導彈-目標追逃相對運動關系模型如圖3所示[11]。采用解析重構法將導彈目標相對運動方程微分并代入導彈加速度表達式后得到目標加速度估算式為

圖3 導彈-目標相對運動關系Fig.3 Relative motion between missile and target

(11)

圖3中,Om為導彈位置,Ot為目標位置;θ,ψvm分別為導彈的彈道傾角和彈道偏角。
1.4 制導律交接問題
對于中遠距空空導彈而言,各飛行段制導信息來源不同、制導律不同,必須考慮如何保證在制導交班時彈道平滑過渡。導彈過載從n1平滑過渡到n2的過程為彈道交接段,該段導引律為交接制導律,在復合導引律設計中必須考慮交接制導律。交接制導律的一般形式為[12]
nc=n1(t)ρ(t)+n2(t)[1-ρ(t)],0≤ρ(t)≤1,
(12)
式中:ρ(t)為從1遞減到0的某一函數。
初制導到中制導彈道交接段以時間為依據,采用長度為Δt的時間進行過渡,設交接開始點為t1,則交接過程中ρ(t)的表達式為
ρ(t)=(Δt+t1-t)/Δt.
(13)
中末交班制導律以導彈目標相對距離為交班依據,ρ(t)的表達式為
ρ(t)=(R(t)-L)/L0,
(14)
式中:L0為交班過程中相對距離變化量;L為末制導開始時刻相對距離;R(t)為導彈目標相對距離。
2 彈道仿真結果
2.1 彈道分析
載機和目標高度10km,速度400m/s,發射距離150km,進入角30°,目標作勻速直線飛行。高拋彈道空空導彈攻擊目標的軌跡如圖4所示。

圖4 導彈攻擊目標軌跡圖Fig.4 Trajectory of missile and target
導彈彈道傾角速率和偏角速率變化如圖5所示。由圖5中可以看到,經過改進設計的導彈初中段交班和中末交班指令變化平穩,最大過載出現在初制導階段,末段彈道傾角速率收斂到0,偏角有所發散,但并不大。

圖5 角速率變化圖Fig.5 Curve of the angle rate
導彈速度變化曲線如圖6所示,導彈發射后在兩級火箭發動機作用下達到最大速度,同時也達到最大拋射角。導彈將繼續向高空飛行,速度開始下降,當導彈飛至最高點后開始下落,速度又略有增大;隨著高度下降空氣阻力也在增加,最終使得速度再次下降直至命中目標。
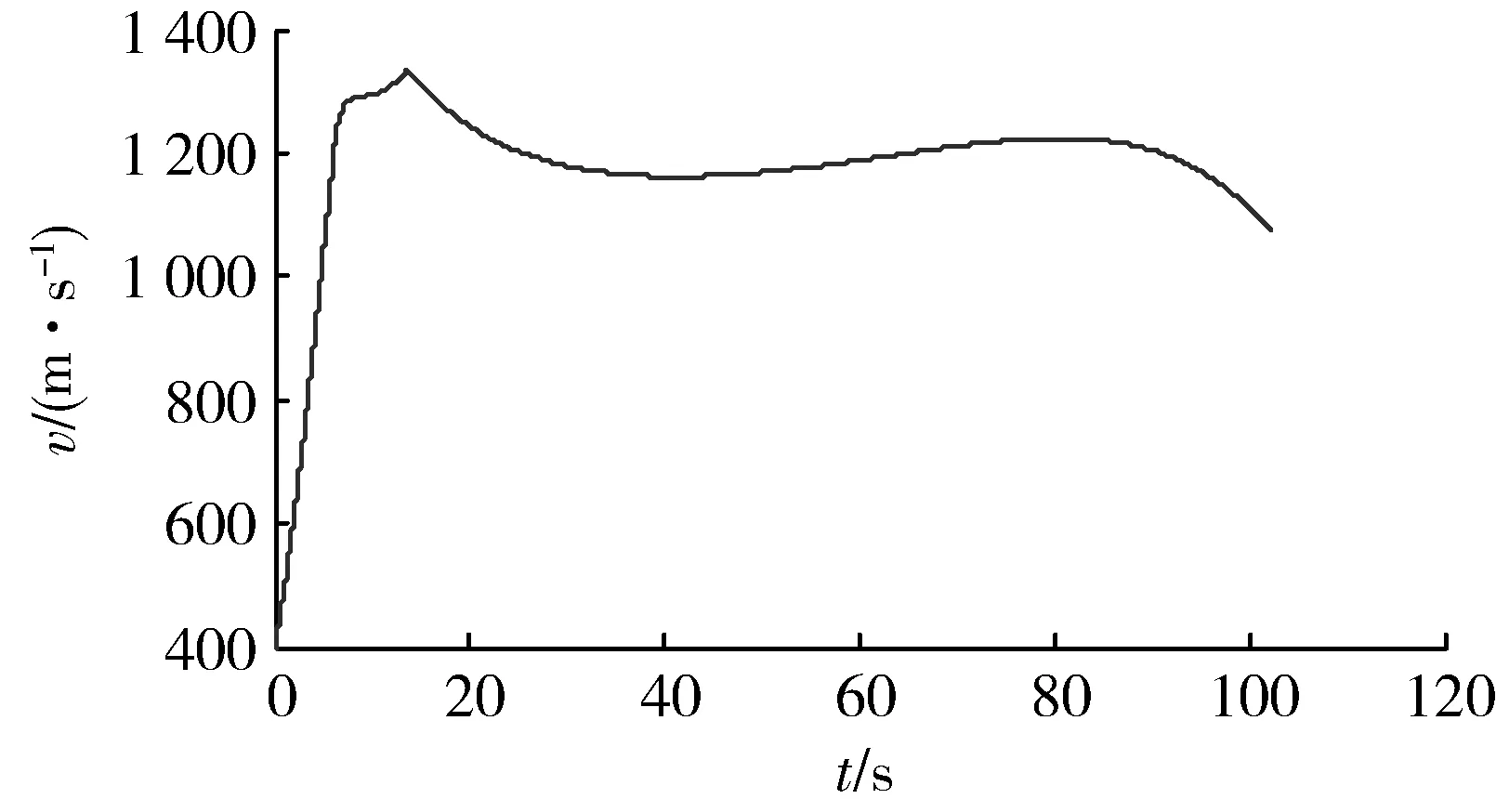
圖6 導彈速度變化情況Fig.6 Variation of missile velocity
2.2 高拋彈道對攻擊效果的影響
仿真中設定載機和目標高度均為10 km,速度400 m/s,導彈進入角30°。在平直發射中不采用高拋彈道直接進入中制導,其仿真結果與高拋彈道對比如表1所示。

表1 不同發射距離下的仿真結果
仿真結果表明在近距離(<50 km)情況下,平直發射與高拋彈道的攻擊效果相當,命中速度以及飛行時間差別不大,脫靶量甚至要小于高拋彈道;而在中遠距離情況(>70 km)下,高拋彈道可以明顯增大命中速度,減小導彈飛行時間和脫靶量。因此對于中遠距空空導彈來說,高拋彈道是一個非常有利的選擇。
3 結束語
仿真結果表明高拋彈道空空導彈攻擊中遠距離目標所需時間短,末速度大,精度高,而且過載變化平穩,彈道特性良好,對中遠距離目標具有良好的攻擊效果。對于采用火箭發動機的空空導彈來說,高拋彈道復合制導律技術上實現起來簡單,無需對導彈進行大的改動,它對于空空導彈增程具有重要意義。
參考文獻:
[1] 任淼,王秀萍.2011年國外空空導彈發展綜述[J].航空兵器,2012(3):3-7.
REN Miao, WANG Xiu-ping. Overview of the AAM’s Development in Other Countries[J]. Aviation Weapon, 2012(3):3-7.
[2] 王冠軍.中遠程空空導彈復合制導研究[D].西安:西北工業大學,2004:50-56.
WANG Guan-jun. Research on Combined Guidance Law for Medium-Long Range AAM[D]. Xi′an: Northwestern Industry University, 2004:50-56.
[3] 楊雪榕,李曉東,梁加紅.空空導彈高拋彈道復合制導律研究[J].系統工程與電子技術,2009,20(12):2918-2923.
YANG Xue-rong, LI Xiao-dong, LIANG Jia-hong. Research on Combined Guidance Law for Parabolic Trajectory AAM[J]. Systems Engineering and Electronics, 2009, 20(12): 2918-2923.
[4] 程國采.戰術導彈導引方法[M].北京:國防工業出版社,1996:251-258.
CHEN Guo-cai. Guidance Method for Tactical Missile[M]. Beijing: National Defense Industry Press, 1996:251-258.
[5] 錢杏芳,林瑞雄,趙亞男.導彈飛行力學[M].北京:北京理工大學出版社,2008:57-64.
QIAN Xing-fang, LIN Rui-xiong, ZHAO Ya-nan. Missile Flight Mechanics[M]. Beijing: Beijing Institute of Technology Press, 2008:57-64.
[6] 周荻.尋的導彈新型導引規律[M].北京:國防工業出版社,2002:28-30.
ZHOU Di. New Guidance Laws for Homing Missile[M].Beijing: National Defense Industry Press,2002:28-30.
[7] ZHOU Di, MU Chun-di, XU Wen-li. Fuzzy Adaptive Variable Structure Guidance Against Highly Maneuvering Targets [C]∥ Beijing:Proceeding of IFAC 14thTriennial World Congress, 1999:259-263.
[8] BRIERLEY S D. Application of Sliding-Mode Control to Air-Air Interception Problem[J] . IEEE Transactions on AES, 1990, 26(2):306-325.
[9] Ravindra Babu K, SARMA I G, SWAMY K N. Two Variable Structure Homing Guidance Schemes with and without Target Maneuver Estimation[C]∥AIAA-94-3566-CP, 1994.
[10] VATHSAL S, RAO M N. Analysis of Generalized Guidance Laws for Homing Missiles [J]. IEEE Transactions on AES, 1995, 31(2):514-521.
[11] 李軍林,袁湛.三維修正比例導引彈道仿真研究[J].機械管理開發,2009(2):161-162.
LI Jun-lin, YUAN Zhan. Research on Three-Dimensional Modified Proportional Guidance Trajectory Simulation[J]. Mechanical Management and Development, 2009(2):161-162.
[12] 梁曉庚,王伯榮,余志峰,等.空空導彈制導控制系統設計[M].北京:國防工業出版社,2006:210-212.
LIANG Xiao-geng, WANG Bo-rong, YU Zhi-feng, et al. Design of AAM Guidance and Control System[M]. Beijing: National Defense Industry Press, 2006: 210-212.
