多導彈編隊飛行導引律設計*
2014-07-10 03:42:16谷逸宇
現代防御技術 2014年1期
關鍵詞:指令
谷逸宇
(北京電子工程總體研究所,北京 100854)
0 引言
多導彈編隊可極大地提高導彈的作戰能力,適應未來戰場的作戰需求[1]。與單枚導彈以接近目標為目的的導引律不同,多導彈編隊飛行導引律要解決的問題是編隊成員的制導指令應該如何產生,以保證編隊隊形在飛向目標過程中,能夠保持期望的狀態。
目前,對多導彈編隊問題的研究多集中在編隊控制方法上。編隊控制方法可以分為3類:主彈-從彈法、行為法和虛擬結構法[2-7]。其中,主彈-從彈法的優點是結構簡單,易于工程實現,缺點是主彈從彈間相對獨立,在主彈進行大過載機動時難以保持隊形;行為法的優點是當編隊成員具有多個目標時,可以很容易地得出控制策略,缺點是不能明確地定義群體行為,很難對其進行數學分析,并且不能保證隊形的穩定性;虛擬結構法的優點是可以很容易地指定編隊成員的行為,并可以進行隊形反饋,缺點是難以進行容錯處理,且需要進行大量通訊,可靠性較差[8-10]。
本文根據主彈-從彈法的原理,設定了主彈從彈,并基于動力學誤差方程,討論了多導彈編隊飛行過程中,為了保證編隊隊形相對目標的位置以及編隊成員相互間期望的距離,各個編隊成員制導指令的產生方法,并針對典型的目標狀態進行了仿真。
1 基于動力學誤差的3枚導彈編隊飛行導引方程
令S描述某一編隊飛行狀態,設Se為其一期望的平衡狀態,如果對于每個實數ε>0,都存在另一個實數δ(ε,t0)>0,使得從滿足不等式
‖S0-Se‖≤δ(ε,t0)
的任意初始狀態S0出發的狀態運動φ(t;S0,t0)對所有時間t>t0都滿足
‖φ(t;S0,t0)-Se‖≤ε,
則稱編隊期望狀態Se是在李雅普諾夫意義下穩定的。
為了保證導彈的穩定編隊,下面以3枚導彈為例,推導其編隊飛行導引方程。
3枚導彈中,選擇一枚作為主彈,主彈的制導指令由其自身的導引律給出而與編隊導引律無關。2枚從彈的制導指令由編隊導引律給出。
描述3枚導彈的編隊問題需要6個獨立的變量,本文兼顧編隊平面相對目標位置和編隊隊形的自身狀態,選取了編隊平面法線與主彈視線關系(e1,e2),編隊成員兩兩之間距離(e3,e4,e5),編隊成員在編隊平面內的相對位置(e6)作為描述編隊隊形的變量,并以誤差的形式表示出來,2枚從彈的制導指令用以使這6個誤差收斂。
慣性坐標系下編隊平面相對于目標的位置關系如圖1所示,設主彈的位置為(xl,yl,zl),從彈1的位置為(xf1,yf1,zf1),從彈2的位置為(xf2,yf2,zf2),目標的位置為(xt,yt,zt),編隊平面的法向量n=(A,B,C),主彈視線向量q=(D,E,F)。由幾何關系可以得到:
D=xt-xl,E=yt-yl,F=zt-zl.
圖1 編隊平面與目標的相對位置Fig.1 Relative position of formation plane and target
分別對A,B,C取二階微分,可以得到:
(1)
(2)
(3)
式中:
GA=(0,-(zl-zf2),(yl-yf2),0,(zl-zf1),
-(yl-yf1));
GB=((zl-zf2),0,-(xl-xf2),-(zl-zf1),0,(xl-xf1));
GC=(-(yl-yf2),(xl-xf2),0,(yl-yf1),
-(xl-xf1),0);
本文選擇編隊平面法向量與主彈視線向量平行作為編隊平面的期望位置,當A≠0且D≠0時,編隊誤差為
(4)
(5)
編隊隊形還應保證3枚導彈彼此之間距離保持在期望值,令主彈與2從彈的期望距離均為l0,2從彈之間的期望距離為l1,則有
(6)
(7)

(8)
除此之外,編隊平面還應保證3枚導彈在平面內的相對位置滿足一定條件,本文選擇2枚從彈相對主彈所在的鉛垂平面對稱作為期望位置,即
e6=zf1+zf2-2zl.
(9)
令e=(e1,e2,e3,e4,e5,e6)T,對兩邊取二階微分,可以得到[11]
(10)
式中:
f=(f1,f2,f3,f4,f5,f6)T,
其中




G=(G1,G2,G3,G4,G5,G6)T,
其中
G3=(-2(xl-xf1),-2(yl-yf1),-2(zl-zf1),0,0,0),
G4=(0,0,0,-2(xl-xf2),-2(yl-yf2),
-2(zl-zf2)),
G5=(2(xf1-xf2),2(yf1-yf2),2(zf1-zf2),
-2(xf1-xf2),-2(yf1-yf2),-2(zf1-zf2))
G6=(0,0,1,0,0,1);
.
可以看出,G與f的大小與主彈的位置、速度、加速度、2枚從彈各自的位置,速度以及目標的位置、速度和加速度有關。顯然detG≠0,由式(10)可以得到:
(11)
若要使誤差e收斂,則誤差e應滿足
(12)
將式(12)代入式(11),則得到從彈的加速度指令:
(13)
由從彈的運動方程[12]可知:
式中:i=f1,f2;v,θ,Ψv分別為各導彈的速度,彈道傾角和彈道側滑角。
對式(14)~(16)兩邊微分,可以得到
u=MuC,
(17)
式中:
顯然,detM≠0,所以:
uC=M-1u.
(18)
將式(13)代入式(18) ,可以得到2枚從彈的制導指令:
(19)
2 算例仿真
本文針對水平面盤旋的機動目標進行了仿真,設主彈按照比例導引律飛向目標,2枚從彈按第1小節推導的編隊導引方程飛行。
本文假設目標機動過載為9,k1=diag(2,2,2),k2=diag(1.5,1.5,1.5),從彈1、從彈2初速度均為800m/s,初始彈道傾角、彈道偏角均為0。圖2,3結果顯示,編隊誤差能夠快速收斂,且對目標機動不敏感。當導彈編隊與目標距離較近時,編隊導彈的需用過載較大,這與傳統的單枚導彈彈道一致。
圖2 誤差收斂曲線Fig.2 Curve of error convergence
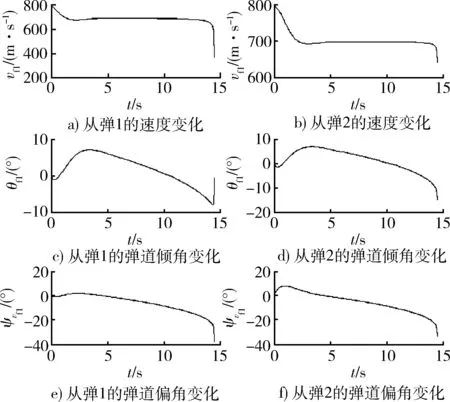
圖3 從彈運動指令Fig.3 Commands of follower's motion
3 結束語
本文在“主從法”隊形保持策略基礎上,針對機動目標,利用編隊誤差的動力學特性,設計了多導彈編隊飛行導引律,并對導引彈道進行方針,得到了以下結論:
(1) 直接在慣性系下建立起來的運動學模型能夠明確地描述導彈編隊與目標之間的關系。
(2) 利用編隊誤差動力學特性建立起來的編隊導引律能夠克服編隊初始誤差和目標機動帶來的影響。
(3) 當導彈編隊無限接近目標時,編隊誤差理論上將會出現奇異。但此時,目標已進入導彈殺傷半徑。
參考文獻:
[1] 夏國洪,王東進. 智能導彈[M]. 北京:中國宇航出版社,2008.
XIA Guo-hong, WANG Dong-jin. Smart Missile[M].Beijing: China Astronautic Press,2008.
[2] BERGMANN E. A New Concept for Aircraft Formation-Keeping Guidance[C]∥ San Diego, CA:AlAA Guidance Navigation and Control Conference,1996: 29-31.
[3] DARGAN J L, PACHTER M, D′Azzo J J. Automatic Formation Flight Control[J]. Journal of Guidance Control and Dynamics, 1994,17(6):1980-1383.
[4] REIF J H, WANG Hong-yan. Social Potential Fields: A Distributed Behavioral Control for Autonomous Robots[J]. Robotics and Autonomous Systems 1999(5):171-194.
[5] LEONARD N E, FIORELL E. Virtual Leaders Artificial Potentials and Coordinated Control of Groups[C]∥Proceedings of the 40th IEEE Conference on Decision and Control,2001:2968-2973.
[6] 洪曄,繆存孝,雷旭升. 基于長機—僚機模式的無人機編隊方法及飛行實驗研究[J]. 機器人,2010(4):505-509.
HONG Ye,MIAO Cun-xiao,LEI Xu-sheng. Formation Method and Flight Test of Multiple UAVs Based on Leader-Follower Pattern[J]. Robot, 2010(4):505-509.
[7] 秦世引,潘宇雄,蘇善偉.小型無人機編隊飛行的控制律設計與仿真[J]. 智能系統學報,2009(3):218-225.
QIN Shi-yin,PAN Yu-xiong,SU Shan-wei. Design and Simulation of Formation Flight Control Laws for Small Unmanned Aerial Vehicles[J]. Caai Transactions on Intelligent Systems, 2009(3) :218-225.
[8] 馬培蓓,紀軍. 多導彈三維編隊控制[J]. 航空學報,2010,31(8):1660-1666.
MA Pei-bei, JI Jun. Three-Dimensional Multi-Missile Formation Control[J]. Acta Aeronautica Et Astronautica Sinica, 2010,31(8):1660-1666.
[9] 韋常柱,郭繼峰,崔乃剛. 導彈協同作戰編隊隊形最優保持控制器設計[J]. 宇航學報,2010(4):1043-1050.
WEI Chang-zhu, GUO Ji-feng, CUI Nai-gang. Research on the Missile Formation Keeping Optimal Control for Cooperative Engagement[J]. Journal of Astronautics,2010(4):1043-1050.
[10] 嵇亮亮.無人機的導引及協同編隊飛行控制技術研究[D].南京:南京航空航天大學,2008.
JI Liang-liang. Study on Formation Fight of UAVs[D]. Nanjing: NUAA,2008.
[11] BOSKOVIC J D, MEHRA R K. Multiple Model-Based Adaptive Reconfigurable Formation Flight Control Design [C]∥Proceedings of the 41stIEEE Conference on Decision and Control, 2002:1263-1268.
[12] 錢興芳,林瑞雄,趙亞男. 導彈飛行力學[M]. 北京:北京理工大學出版社,2011.
QIAN Xing-fang, LIN Rui-xiong, ZHAO Ya-nan. Missile Flight Aerodynamics[M].Beijing: Beijing Institute of Technology Press,2011.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
