一種基于Kalman濾波的衛星遙測數據判讀系統
2014-07-19 13:56:26吳婧蘇振華孫誠
航天器工程 2014年3期
關鍵詞:系統
吳婧 蘇振華 孫誠
(航天東方紅衛星有限公司, 北京 100094)
一種基于Kalman濾波的衛星遙測數據判讀系統
吳婧 蘇振華 孫誠
(航天東方紅衛星有限公司, 北京 100094)
分析了衛星遙測數據的變化規律,提出了一種基于卡爾曼(Kalman)濾波的遙測數據判讀系統框架,并定義了系統中各模塊的功能及接口關系,應用衛星實際遙測數據對判讀系統的數據預測效果進行了驗證。結果表明,此系統對數據異常反應迅速,能夠很好地滿足衛星測試的實時性要求。
衛星;數據判讀;卡爾曼濾波
1 引言
衛星遙測數據判讀是指衛星在地面綜合測試過程中,依據判讀準則,對衛星控制指令、下行遙測數據進行相關性檢查,判斷衛星各設備工作是否正常、接口是否正確、衛星運行是否正常的過程。為了準確地把握衛星的工作狀態,及時發現問題,必須對這些數據進行不間斷的監視和判讀。
目前,大部分衛星數據判讀工作仍以人工操作為主完成,這不但需要大量具有豐富知識和經驗的人員,還存在著漏判和誤判的隱患[1]。衛星測試過程需要監視、檢測如載荷、敏感器和執行機構等數百個部件的實時數據和狀態。測試數據量龐大,信號類型復雜,數據實時性、一致性和可靠性要求高,數據隨環境變化快,因此,對衛星測試系統中數據判讀和處理速度等均提出了很高要求,傳統的手工數據判讀方法無法滿足衛星測試需求[2]。為解決上述問題,目前主要使用遙測參數自動化監視工具軟件,能夠自動根據定義的參數范圍進行數據判讀,參數越界時發出報警提示,但是對于參數異常范圍的定義不夠精確,且嚴重依賴測試人員的經驗。
本文提出一種基于Kalman濾波的衛星遙測數據判讀系統,利用衛星當前時刻的遙測數據,實時預測下一時刻的遙測數據,能夠提前發現數據的異常變化。實際測試應用中,如衛星遙測數據發生異常,某個遙測值異常攀升或下降,初期因為沒有超過預先設定的門限值,測試人員無法發現測試異常。應用本系統,經過一段時間的數據積累,能夠快速地給出一段時間后參數越界的報警,提醒測試人員重點給予關注,便于發現遙測數據異常的變化趨勢,適用于長期數據判讀和異常數據檢測。
2 衛星遙測數據變化規律分析
通常,在判讀衛星一個遙測參數時,主要考慮以下幾方面的因素:當前遙測數據幀中的各個參數值、歷史數據、相關遙控指令、飛行事件、時間等[1]。對衛星遙測數據的變化規律分析要考慮以下兩種情況。
2.1數據在給定的范圍內變化
數據在給定的范圍內的超限判讀,是通過對采集到的數據進行上下限比較就能很好地解決問題[3]。實際上,在對衛星遙測參數判斷時,至少要考慮以下幾種情況。
1)數據維持在一恒定值附近
在衛星設備狀態未發生改變時,遙測數據平穩變化,變化率不大。此類數據主要包括特定衛星狀態下的電壓、電流、溫度參數等。例如,紅外地球敏感器電機電流值、慣性姿態敏感器溫度值、慣性姿態敏感器電源狀態等遙測參數。
2)無遙控指令、飛行事件發生而數據有變化
在沒有遙控指令、飛行事件發生時,遙測數據突然發生變化或緩慢變化。此類數據主要包括不受遙控指令、飛行事件影響的一些參數。出現此種情況時,很可能是異常,應重點關注。
3)與遙控指令相關聯的數據
當地面或衛星上發出某個指令或指令集的時候,相應的參數發生變化,該類遙測參數是否異常的判斷準則可能發生改變,應按新的判讀知識進行判斷。例如,地面發出運行姿態機動模式遙控指令,衛星判斷指令無誤后開始執行指令,控制分系統工作模式會發生變化,同時,相關執行機構開始動作,即執行機構工作狀態會發生變化,各敏感器姿態測量數據同時也會發生變化,而當衛星機動到位后,執行機構和敏感器數據會穩定在一定的范圍內。參數新的變化范圍與原來會有一定的差別,這屬正常情況,只是指令注入前后判斷準則不同。
4)與飛行事件相關聯的數據
某種飛行事件發生后,相關的遙測參數發生變化。例如,在衛星由地影區進入光照區時,太陽翼輸出電流會產生突變,數字太陽敏感器全開碼和監視碼遙測也會產生突變。再如,某衛星飛行程序設定在星箭分離30 min后,當衛星姿態角和姿態角速度滿足一定條件后自主啟動動量輪,動量輪控制電壓會產生突變,動量輪轉速會逐漸增加,動量輪電機電流也會增加,并且對衛星姿態會造成一定程度的擾動,然后動量輪轉速穩定在標稱值附近。此情況與情況3)基本相似,但參數會在此點上進行突變,屬正常情況,只是事件發生前后判斷準則不同。
2.2數據按某種趨勢變化
衛星有些遙測數據是按照某種規律進行變化的,但是這種變化規律不是簡單的上升或下降,它還包括沿著某種函數曲線變化[1]。例如,星敏感器、數字太陽敏感器的實時姿態測量數據隨衛星姿態和位置發生變化,以軌道周期按照一定的規律變化。
3 基于Kalman濾波的預測方法
Kalman濾波[4-6]是以最小均方誤差為準則的最佳線性估計,它根據前一個估計值和最近一個測量數據來估計信號的當前值,利用狀態方程和遞推方法進行估計,而且得到的解也是以估計值的形式給出的,能很好地應用于處理多變量系統[7-9]、時變線性系統及非線性系統的最佳濾波等。本節對Kalman濾波算法進行介紹,并將其用于對遙測數據的預測。
3.1遙測數據與時間關系的回歸模型
將遙測數據用x表示,不失一般性,設該參數與時間t可用非線性函數表示為
(1)
根據遙測數據特點,在有限時間內,考慮到平穩過程中還受環境變化的影響,遙測數據用時間2階Taylor展開近似,設遙測數據采樣時間間隔為Δt,則可得
(2)

3.2系統狀態方程及觀測方程
根據3.1節分析,由式(2)可得遙測數據的狀態方程描述:
(3)
觀測方程記為
(4)

3.3遙測數據預測
在建立遙測數據模型方程式(3)和式(4)的基礎上,遙測數據Xk+1的最佳估計可以由下面的Kalman濾波方程組給出。
Kalman濾波器的狀態更新方程如下:
(5)
(6)
測量校正方程如下:
(7)
(8)
(9)
基于Kalman濾波的遙測數據預測步驟如下:

(3)利用由式(6)求得的預測誤差方差陣,進而利用式(7)計算Kalman濾波器增益矩陣Kk+1;

4 遙測數據判讀系統框架設計
基于Kalman濾波的衛星遙測數據判讀系統實時接收衛星的遙測數據,同時能夠查詢歷史遙測數據庫,運用第3節所述預測方法進行數據預測,并根據專家測試庫[10]的知識內容將預測結果輸出給遙測數據判讀系統,進而實現衛星遙測數據判讀。系統的輸入輸出接口關系以及框架設計如圖1所示。
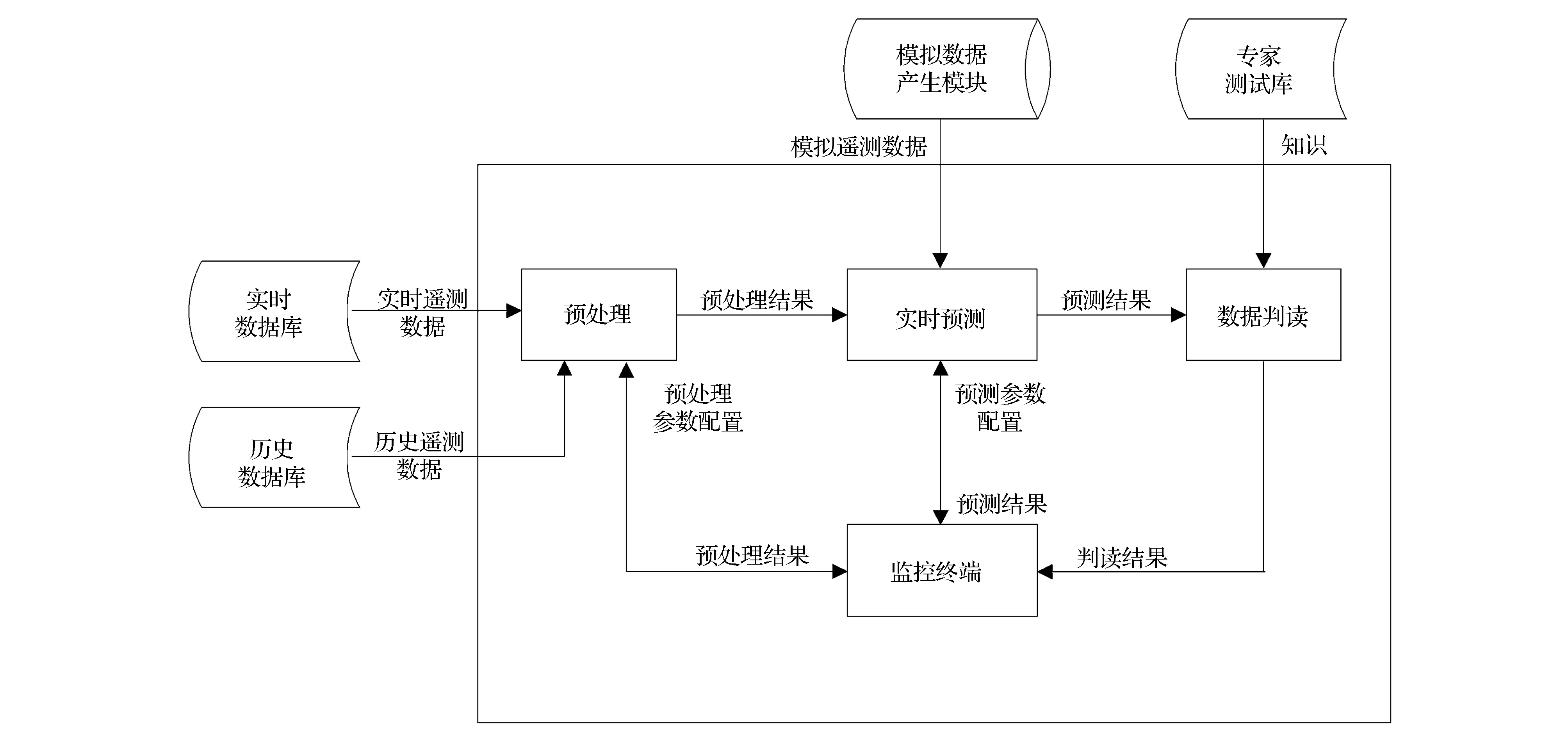
圖1 基于Kalman濾波的衛星遙測數據判讀系統接口關系及系統框架
4.1預處理模塊
衛星實時下傳的遙測數據可能存在著不連續、跳碼等非平穩現象,預處理模塊要對遙測數據進行處理,從中選擇有效的數據。另外,由于星上設備通常是自主運行的,并且遙測數據產生具有一定的時間特性(如按采集周期產生),因此需要對遙測數據的產生時間進行分析,判斷該數據的產生時間是否正確[2],如果存在異常,則通過監控終端提交測試人員確認。同時對歷史遙測數據進行標準化處理,按一定的周期進行采樣,為實時預測模塊提供特定時間間隔的數據。
4.2實時預測模塊
實時預測模塊基于Kalman濾波和相關歷史遙測數據,運用第3節所述預測方法進行數據預測,輸出預測結果至數據判讀模塊,是遙測數據判讀系統的核心模塊。本模塊要滿足以下功能:
(1)可自動再次對遙測數據進行分析、學習,并根據狀態和飛行事件變化具有重新累積數據和重新預測的功能;
(2) 對預測值與實際遙測數據進行比較,若差值大于一定的限度(此值可設定,設定值應注意防止虛報警)時,應通過監控終端給出提示;
(3)具有系統默認配置的功能,也可以提供手動配置,事先人工干預,調整預測算法的配置參數等。
4.3數據判讀模塊
數據判讀模塊根據專家測試庫的知識內容,判斷衛星實時下傳的遙測數據是否正常,是否報警,以及衛星的測試狀態是否合理。如發現異常,即通過監控終端向測試人員發出報警信號并顯示報警原因。
4.4專家測試庫
專家測試庫主要包括測試數據的正常值(穩定工作的數據范圍)、報警值(正常工作值的下限和上限)、開機值、相關遙測(用于多個測試數據聯合判斷)、相關控制命令(遙控指令、測試設備控制指令、衛星上行注數等)正確執行后的遙測數據值,以及判斷時間和測試中允許的衛星狀態等信息。
4.5模擬數據產生模塊
模擬數據產生模塊按照用戶的配置,產生特定變化規律的模擬數據或對實際數據進行修改產生模擬數據,然后輸入到實時預測模塊,對預測值與實際值進行比對,用于驗證系統的功能正確性。
4.6監控終端
監控終端是人機接口,顯示界面應直觀、醒目,其圖形化狀態顯示界面應反映衛星各分系統的組成與工作狀態、各部分間的聯系與控制關系、信息信號流向、所定義的參數配置和信息輸出,同時要嵌入報警系統的輸出信息窗口。
5 應用驗證
利用某衛星控制分系統陀螺組件發生故障期間的實際遙測數據,對數據判讀系統的應用效果進行了驗證。該衛星陀螺組件由4個單自由度液浮陀螺儀組成,其中3個陀螺的輸入軸兩兩相互垂直,形成正交的X、Y、Z測量坐標系,成為X、Y、Z陀螺;第4個陀螺為斜裝式,成為S陀螺。
2013年4月5日,某衛星控制分系統加電進行整星熱平衡試驗低溫第一個工況。控制分系統加電后自主開啟陀螺加溫電路,X、Y、Z、S陀螺溫度遙測值大于2 V后可以注入遙控指令開啟陀螺馬達。測試中發現,Z陀螺溫度遙測值仍然沒有穩定,由正常的2.5 V左右逐漸上升到5 V,其他遙測數據均正常。使用遙測數據判讀系統的預測效果如圖2所示,紅色曲線為實際遙測數據,綠色曲線為預測數據。由圖2可見,預測數據與實際數據的變化趨勢基本吻合,預測曲線能提前于實際數據變化曲線,數據判讀系統通過監控終端向測試人員發出報警信號并顯示報警原因。
實際測試應用中,如衛星遙測數據發生異常,某個遙測值有異常上升或下降趨勢,初期因為沒有超過預先設定的門限值,測試人員無法發現測試異常。如果應用此數據判讀系統,經過一段時間的數據積累,系統能夠提前給出一段時間后參數越界的報警,提示測試人員重點給予關注,便于發現異常變化趨勢。
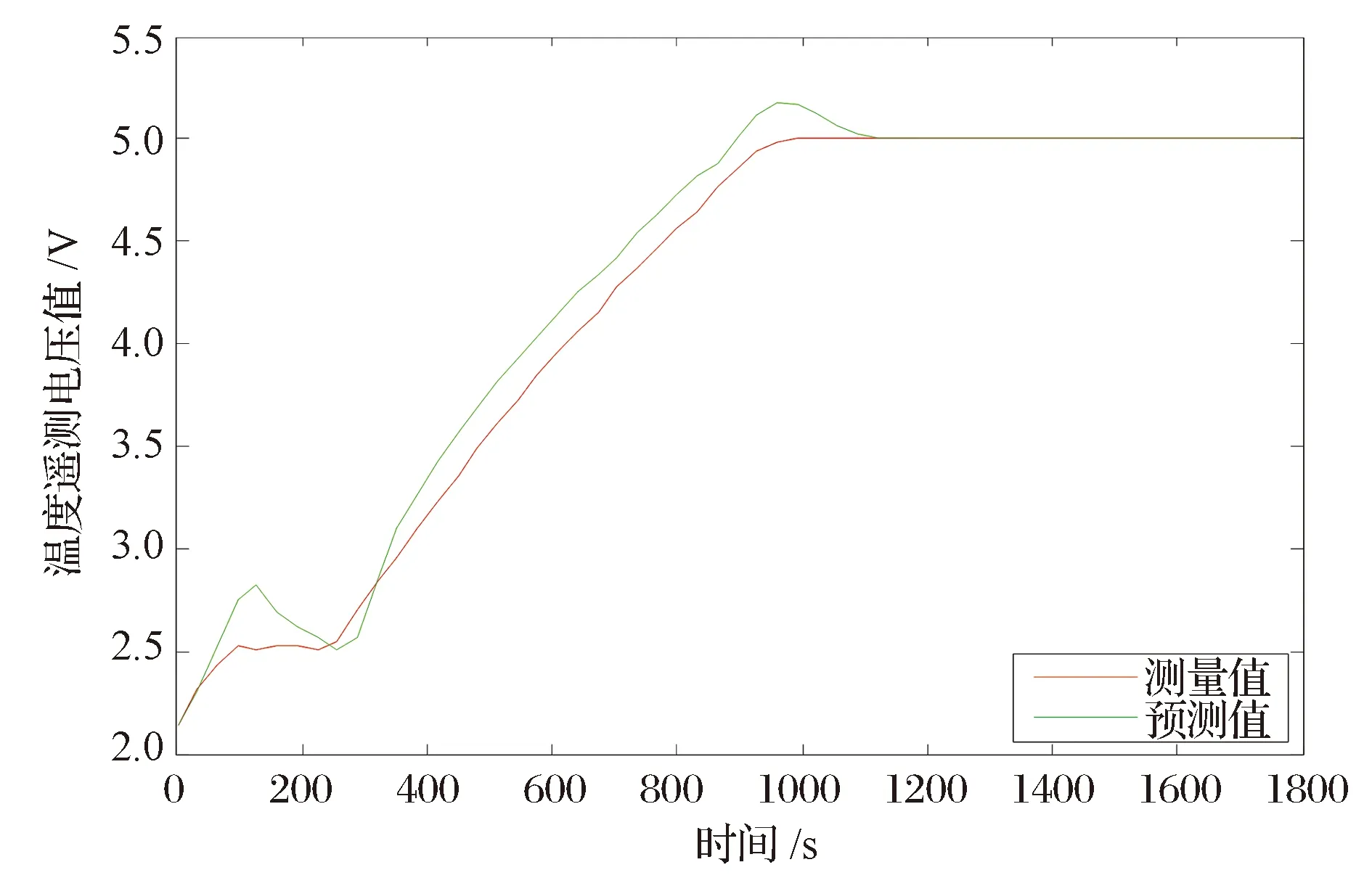
圖2 陀螺溫度遙測預測效果
6 結束語
本文針對衛星遙測數據量龐大,信號類型復雜,數據實時性、一致性和可靠性要求高,數據隨環境變化快,傳統手工數據判讀方法無法滿足衛星測試需求的問題,分析了遙測數據的變化規律,提出了一種基于Kalman濾波的衛星遙測數據判讀系統框架,定義了系統中各模塊的功能及接口關系,并應用某衛星實際遙測數據對預測效果進行了驗證。驗證結果表明,該系統能準確地預測出下一周期數據,對數據異常區域反應迅速,能及時發現并預報數據異常,并且算法執行效率高,能夠很好地滿足衛星測試的實時性要求,適用于長期數據判讀和異常數據檢測。
References)
[1]李砥擎,朱維寶,王慶成,等.一種用于航天器數據監視的知識表示方法[J].計算機測量與控制,2006,14(3):289-292
Li Diqing, Zhu Weibao, Wang Qingcheng,et al. Knowledge representation approach to spacecraft data monitoring[J].Computer Measurement & Control, 2006,14(3):289-292 (in Chinese)
[2]吳限德,孫兆偉,陳衛東.小衛星測試數據在線時間序列判讀方法[J].哈爾濱工程大學學報,2012,33(3):383-388
Wu Xiande, Sun Zhaowei, Chen Weidong.An on-line data interpretation method in a micro-satellite ground test system based on a time series analysis[J]. Journal of Harbin Engineering University, 2012,33(3):383-388 (in Chinese)
[3]趙峰,文博武,孫潔,等.基于衛星數據判讀的一種方法[C]//第十六屆全國測試與故障診斷技術研討會.四川:中國計算機自動測量與控制技術協會,2007:225-229
Zhao Feng, Wen Bowu, Sun Jie,et al. An interpretation method based on satellite data[C]//The 16thNational Testing and Fault Diagnosis Technology Conference. Sichuan Province: China Computer Automated Measurement and Control Technology Association, 2007:225-229 (in Chinese)
[4]鮑齊克 S M. 數字濾波和卡爾曼濾波[M].北京:科學出版社,1984
S M Bozic. Digital filter and Kalman filter [M]. Beijing: Science Press, 1984
[5]Myers A,Luecke R H.Process control application of an extended Kalman filter algorithim[J].Comp and Lehem.Eng,1991,15(12):853-856
[6]廖瑛,尹大偉,鄭宇昕,等. 基于自適應Kalman濾波算法的航空發動機可測參數及其偏離量估計[J]. 國防科技大學學報,2012,34(4):1-6
Liao Ying,Yin Dawei,Zheng Yuxin,et al. Aeroengine measurable parameters estimation using adaptive Kalman filter algorithm [J]. Journal of National Universtity of Defense Technology, 2012, 34(4):1-6 (in Chinese)
[7]章輝,李靜雅,許曉東,等. Kalman濾波預測的多小區子載波分配方法[J]. 北京郵電大學學報,2009, 32(3):86-90
Zhang Hui, Li Jingya, Xu Xiaodong,et al. Multicell subcarrier allocation based on Kalman filter forecast [J]. Journal of Beijing University of Posts and Telecommunications, 2009, 32(3): 86-90 (in Chinese)
[8]武延鵬,尤政,任大海. 采樣Kalman濾波器在天文衛星定姿濾波中的應用[J]. 清華大學學報,2003,43(8):1013-1016
Wu Tingpeng, You Zheng, Ren Dahai. Unscented Kalman filter application in astronomical satellite attitudedetermination [J]. Journal of Tsinghua University, 2003, 43(8):1013-1016 (in Chinese)
[9]蘇小平,陳偉根,奚紅娟. 采用Kalman濾波算法預測變壓器繞組熱點溫度[J]. 高電壓技術,2012,38(8):1909-1916
Su Xiaoping, Chen Weigen, Xi Hongjuan.Winding hot-spot temperature prediction for oil-immersed power transformer based on Kalman filter algorithm [J]. High Voltage Engineering, 2012, 38(8):1909-1916 (in Chinese)
[10]馮孝輝,王靜,楊海龍. 基于知識推理的小衛星綜合測試知識庫系統架構設計與應用[J]. 計算機測量與控制,2011,19(4):753-792
Feng Xiaohui, Wang Jing, Yang Hailong.Design and application on case-based knowledgebase software for satellite integration testing [J]. Computer Measurement & Control, 2011, 19(4):753-792 (in Chinese)
(編輯:李多)
Satellite Telemetry Data Interpretation System Based on Kalman Filter
WU Jing SU Zhenhua SUN Cheng
(DFH Satellite Co.Ltd., Beijing 100094, China)
By analysing the telemetry data according to their transforming rules, the paper proposes an interpretation system based on Kalman filter for satellite. Besides, the functions of every module and the interfaces are defined. Finally, by taking advantage of the telemetry data,the system proposed is verified. The results show that this interpretation system has good performances in detecting data abnormal and can meet real-time requirements of the tests for satellite.
satellite; data interpretation; Kalman filter
2013-10-29;
:2014-02-20
國家重大航天工程
吳婧,女,碩士,從事小衛星控制系統測試技術研究。Email:wu_jing_jing@hotmail.com。
V557
:ADOI:10.3969/j.issn.1673-8748.2014.03.016
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32