載人小行星探測的任務特點與實施途徑探討
2014-07-19 13:56:26王開強張柏楠王悅劉歡武江凱李志海
航天器工程 2014年3期
王開強 張柏楠 王悅 劉歡 武江凱 李志海
(中國空間技術研究院載人航天總體部, 北京 100094)
載人小行星探測的任務特點與實施途徑探討
王開強 張柏楠 王悅 劉歡 武江凱 李志海
(中國空間技術研究院載人航天總體部, 北京 100094)
介紹了載人小行星探測的發展現狀,對目前美國基于“獵戶座”飛船的載人小行星探測的概要方案進行了描述,包括探測器系統組成、運載火箭和飛行方案等內容。從速度增量、目標星引力等方面,分析了載人小行星探測的任務特點,并與載人火星探測、載人月球探測以及無人小行星探測的任務特點進行了比較。給出了載人小行星探測的實施途徑建議,包括目標星選擇、載人飛船系統設計等。討論了其所涉及的推進、星際飛行安全保障、小行星表面行走等關鍵技術。研究結果可為我國開展載人深空探測提供參考。
載人小行星探測;任務特點;實施途徑;關鍵技術
1 引言
小行星探測有助于探索宇宙的形成和演化過程,有助于保護地球免受潛在威脅小行星的撞擊,目前已成為載人深空探測領域的熱點。迄今為止,共有7個無人探測器探訪過小行星,其中美國的“近地小行星交會”(NEAR)探測器[1]和日本的隼鳥號探測器[2]實現了對小行星的著陸探測。小行星探測發展到一定階段,就需要人的參與,以發揮人的主觀判斷力、創造性和靈活性,更好地開展小行星表面巡游、樣本采集與辨識等探測活動。另外,小行星還可以作為人類前往火星等其它星體的中轉站。目前,已有美國提出了載人小行星探測的計劃。載人小行星探測已開始成為21世紀載人深空探測領域的研究熱點。
本文首先介紹了載人小行星探測的發展現狀,然后分析了載人小行星探測的任務特點,并與其他載人深空探測,以及無人小行星探測的任務特點進行了比較,最后對載人小行星探測所涉及的關鍵技術進行了討論。
2 載人小行星探測發展現狀
目前,僅有美國提出了基于“獵戶座”飛船的載人小行星探測計劃,擬對編號為2000SG344小行星等進行載人登陸探測[3-4]。
2.1探測器系統組成
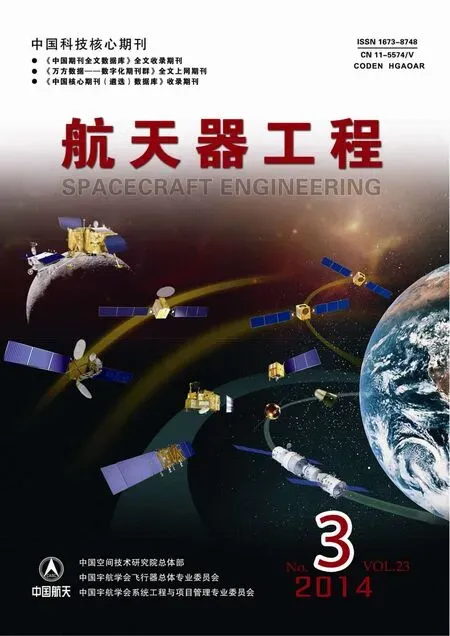
整個載人探測器系統由地球出發站(Earth Departure Station,EDS)、升降飛行艙、“獵戶座”飛船三大部分組成,如圖1所示[3]。各部分由運載火箭發射進入近地軌道進行組裝。
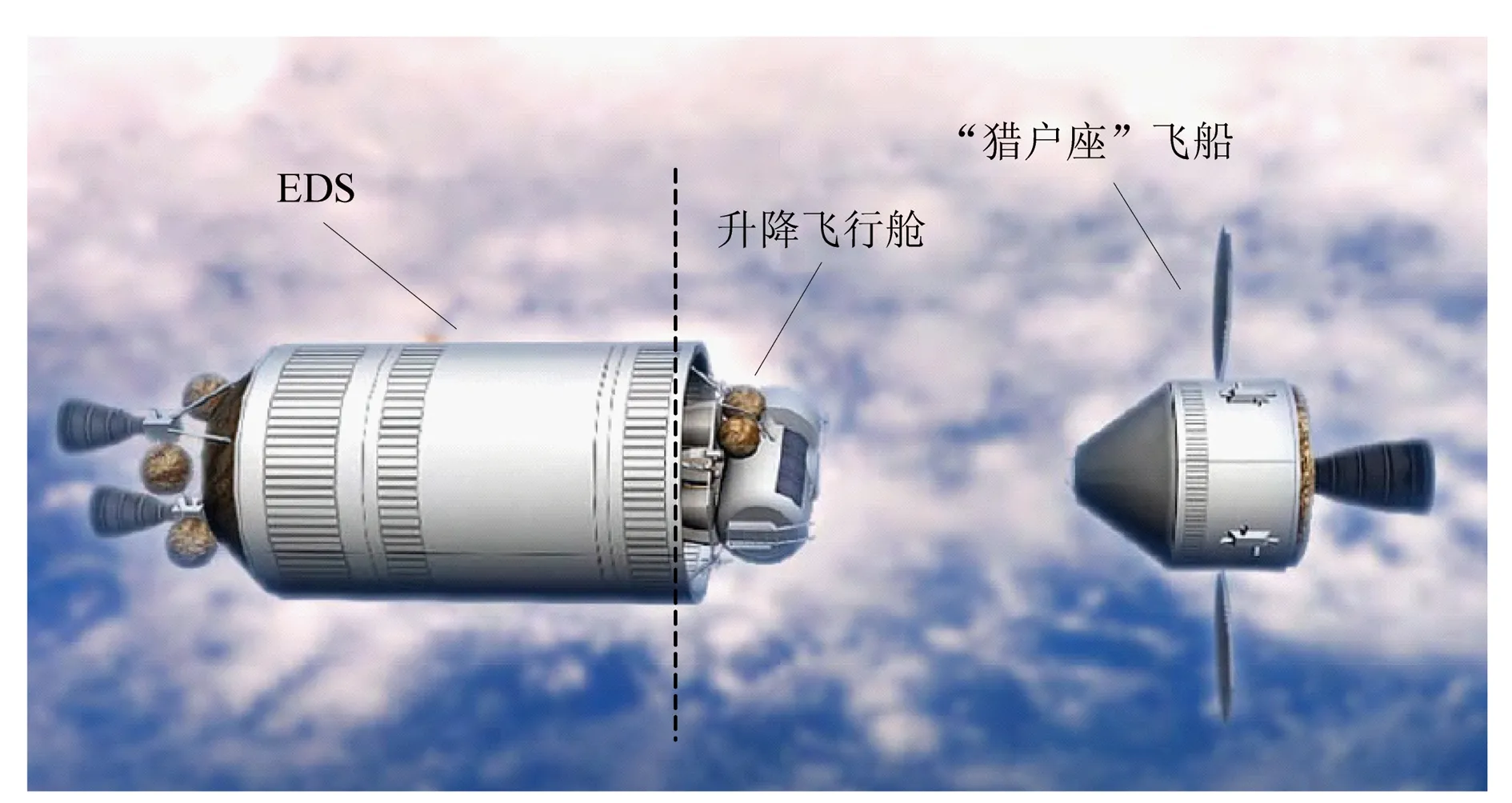
圖1 探測器系統及其近地軌道組裝
1)EDS
類似于推進艙的功能,為整個探測器系統提供變軌推力和速度增量,在探測器系統成功與小行星交會后或逃逸小行星后被拋離。
2)升降飛行艙
發射時位于整個探測器系統的中間。按照工作時段和功能的不同又可分為上升飛行艙、下降飛行艙兩部分。上升飛行艙為飛船離開小行星提供推力;下降飛行艙為飛船和升降飛行艙組合體在小行星表面軟著陸提供制動推力,在飛船和上升飛行艙組合體發射、飛離小行星時,下降飛行艙扮演發射架的角色,如圖2所示[3]。
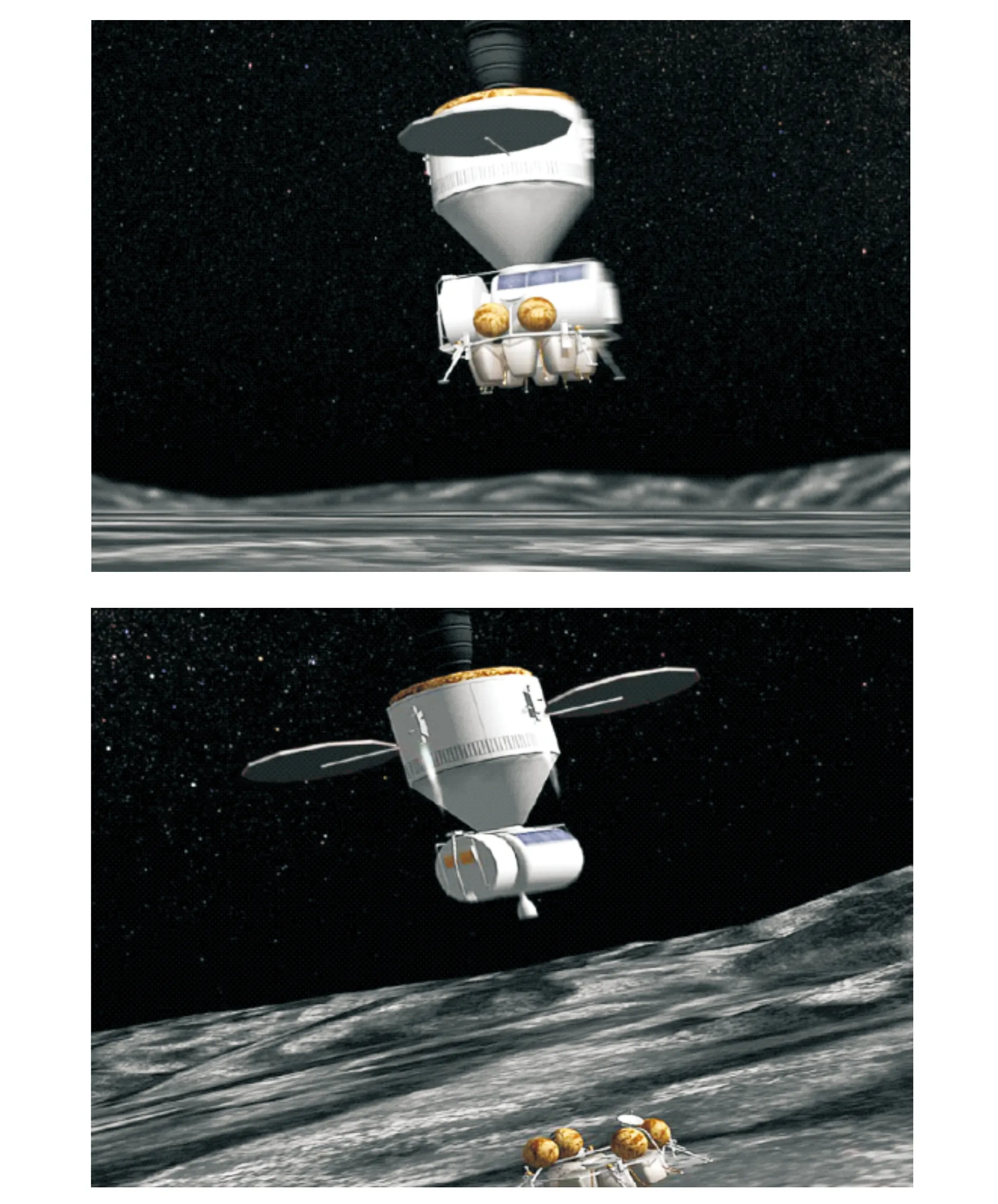
圖2 著陸及飛離小行星
3)“獵戶座”飛船
“獵戶座”飛船(Orion CEV)是美國為重返月球計劃設計的飛船,由返回艙和服務艙構成,可供4名航天員執行為期21天的載人登月探測使命。后來,美國取消重返月球計劃,研究將“獵戶座”飛船用于載人近地小行星(Near Earth Asteroid,NEA)探測。“獵戶座”飛船的主要性能參數如表1所示[4]。
表1 “獵戶座”飛船的主要性能參數
2.2運載火箭
運載火箭方面,美國考慮選擇已有的成熟的運載火箭型號,將探測器系統的各部分分批次發射至近地軌道。目前美國的探測方案主要考慮了宇宙神-5(Atlas-5)、德爾它-4(Delta-IV)和“戰神”(Ares)系列運載火箭,如圖3所示[3]。
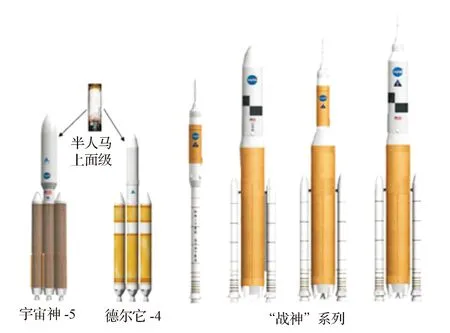
圖3 美國考慮使用的運載火箭
2.3飛行方案
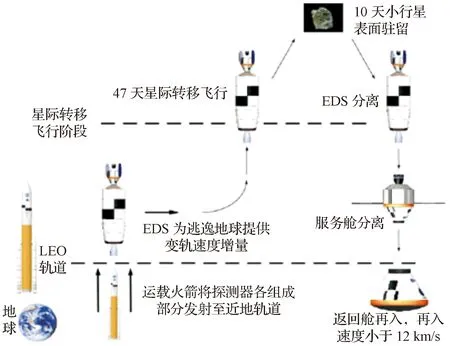
圖4 美國載人探測編號為2000SG344的小行星的飛行方案
以載人探測編號為2000SG344的小行星為例,其飛行方案如圖4所示,主要過程為:①使用運載火箭將探測器組合體各部分發射至近地軌道(LEO),并進行組裝;②EDS為組合體提供逃逸地球的變軌速度增量,使其進入地球-小行星星際轉移飛行軌道;③飛行47天后,使用EDS與小行星實施交會;④飛船與升降飛行器組合體和EDS分離,并在下降飛行艙的推力作用下在小行星表面軟著陸;⑤進行為期10天的小行星表面駐留,開展探測任務;⑥飛船在上升飛行艙的推力作用下發射、飛離小行星,并再次與EDS對接;⑦EDS提供返回變軌的速度增量,使飛船進入小行星-地球返回轉移軌道,EDS和上升飛行艙分離;⑧抵達地球,再入地球前拋掉飛船服務艙;⑨飛船返回艙以小于12 km/s的速度再入地球大氣,安全著陸。整項探測任務共歷時105天,其中地球-小行星轉移飛行47天,在小行星表面及附近駐留10天,小行星-地球轉移飛行48天。任務所需總速度增量為6.875 km/s[4]。
3 載人小行星探測的任務特點
載人小行星探測具有自身的一些特殊性,它與載人月球探測、載人火星探測、無人小行星探測相比均有區別。分析研究載人小行星探測的任務特點,明確其在任務實施、技術難度等方面的特殊性,是載人小行星探測首先要研究的內容。
3.1與其他載人深空探測的比較
與載人火星探測、載人月球探測任務相比,載人小行星探測的任務特點如下。
1)速度增量、飛行時間、質量規模
小行星數量眾多,分布廣泛,公轉軌道差異很大,因此針對不同目標小行星的載人探測任務所需的速度增量、飛行時間、質量規模有很大不同。國內已有研究得到載人小行星探測使命所需的速度增量(從停泊軌道上出發及以后的速度增量)最小約4 km/s[5],最大可以達到11 km/s以上;飛行時間大致在幾十天到200天;探測器系統采用化學推進的質量規模在百噸級至千噸級。Daniel Zimmerman等人對編號為2000SG344的小行星進行了分析研究,得到速度增量為6.875 6 km/s、飛行時間105天的探測使命;對小行星1999AO10載人探測使命進行分析計算,得到速度增量為7.183 9 km/s、飛行時間180天的探測使命[4]。
2)目標星引力、大氣環境
對于近地小行星,其引力很小,可忽略,且沒有大氣,因此載人小行星探測的進入、減速與著陸(EDL)過程與載人火星探測有很大不同,載人探測器與小行星的附著著陸過程類似于兩個日心軌道航天器的“交會對接”,推進劑消耗可大幅降低,著陸器結構也得以簡化。另外,也可以考慮探測器不在小行星表面著陸,而是在適當的高度保持對小行星的懸停、伴飛,此后航天員出艙附著著陸于小行星表面開展探測活動,這樣可以省去升降飛行艙的環節和著陸艙的配置,簡化探測器的組成和結構,減小探測器的規模。
3)目標星可能短時間進入地球引力范圍
許多小行星的公轉軌道與地球非常接近,它們有可能進入地球的引力范圍,在短時間內以地球為中心引力體,沿著地球雙曲線軌道飛行。有預測小行星Apophis將分別于2029和2036年進入地球引力范圍[6]。此時,若利用這段時間對小行星進行載人登陸探測,則探測器僅通過地球軌道飛行即可與小行星交會,飛行任務時間可大幅縮短至數天,這有助于大幅降低航天員在飛行期間所需攜帶的消耗品,減小探測器質量規模,降低整個載人小行星探測任務的技術難度和復雜度。
載人小行星探測與載人火星探測[7]、載人月球探測的任務特點比較如表2所示。
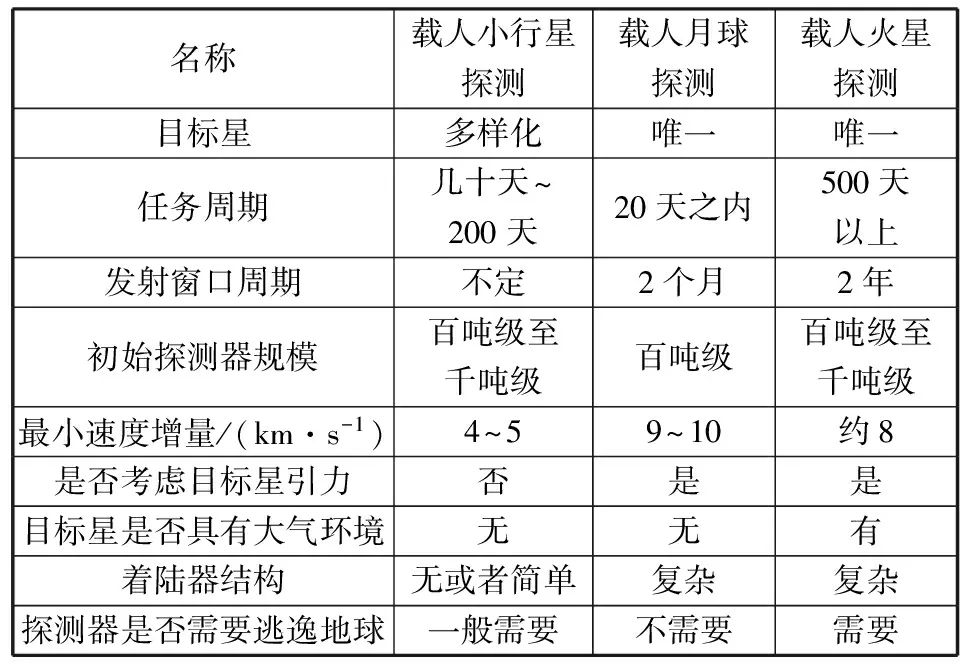
表2 三種載人深空探測任務的特點比較
3.2與無人小行星探測任務的比較
載人小行星探測與無人小行星探測相比,主要有以下5個方面不同。
(1)載人小行星探測的飛行時間不能過長。這主要是考慮生命保障系統的運行能力和規模,以及航天員在太空中駐留時間的限制。“國際空間站”的運行過程中,航天員在站上的最長連續駐留時間控制在180天左右;而航天員在太空中駐留的最長時間記錄約為一年半。無人小行星探測由于沒有航天員的參與,其總飛行時間可以很長,可達到幾年,這可以很大程度地降低無人探測任務所需要的總速度增量,減小探測器質量。
(2)載人小行星探測的速度增量較大。飛行時間與速度增量存在緊密聯系,其滿足以下規律:對于已知兩點間的轉移,速度增量先隨飛行時間的增大而減小至最小值,此后隨飛行時間的增大而增大。由于載人小行星探測的飛行時間有限,其速度增量可能無法縮短至兩點間軌道轉移的最小值;而無人小行星探測飛行時間非常長,可以通過合理增大飛行時間減小整個飛行任務所需要的速度增量。
(3)載人小行星探測在規模上與無人小行星探測有很大差別,包括乘員組在內的探測器初始質量將比無人探測器大很多,可達數百噸乃至數千噸,一般需要在近地軌道進行組裝。
(4)飛行軌道設計時,需要進行應急返回軌道的設計,以保證航天員安全。其一般原則是,航天員在飛行期間的任意時刻,均可沿應急返回軌道安全返回至地球,以應對隨時可能出現的嚴重故障。
(5)載人小行星探測器需要配置環控生保分系統、應急救生分系統、照明分系統和支持航天員出艙活動的分系統等,這些都會增加載人探測器的技術復雜程度,增大載人探測器的質量。
4 載人小行星探測的實施途徑與關鍵技術建議
4.1載人小行星探測的實施途徑
參考美國基于“獵戶座”飛船的載人小行星探測方案,結合目前國內外載人航天技術及活動的發展現狀,對載人小行星探測的實施途徑提出以下建議。
(1)優先選擇近地小行星(NEA)作為載人探測的目標星。在所有小行星中,近地小行星距離地球較近,對其進行載人探測的任務時間和速度增量較低,有助于降低探測任務的成本,提高任務實施的可行性。另外,近地小行星具有潛在撞擊地球的威脅,對其進行載人探測有助于保護地球免受其撞擊,有助于促進地球防護領域的相關研究。目前,美國考慮的編號為2000SG344和1999AO10的小行星也均為近地小行星。
(2)設計通用載人飛船系統,進行包括載人小行星探測在內的載人航天活動。美國的“獵戶座”飛船具備完成載人登月任務和載人小行星探測任務的能力,其不局限于某一特定的載人航天任務,應用范圍較廣。我國未來的載人航天活動,可能包含近地軌道載人航天任務、載人登月探測、載人小行星探測和載人火星探測,若單獨研制針對某項探測任務的飛船,會造成飛船型號多、通用性差、應用范圍局限等問題。因此,應考慮研制通用化、模塊化、系列化的載人飛船系統,其由具備不同功能的艙段(如推進艙、返回艙、著陸艙等)組成,各艙段根據不同載人航天任務的指標要求形成系列。在執行某特定的載人航天任務時,僅需選擇合適的艙段組合成探測器組合體即可。
(3)發展大型、重型運載火箭。載人小行星探測器在LEO上的初始質量規模至少在百噸級,意味著采用未來最大LEO運載能力為25 t的長征-5火箭需要至少4次發射,并進行至少3次在軌交會對接組裝;而對于其它目標小行星,則需要更多的發射次數和交會對接組裝次數。發展LEO運載能力為50噸級、100噸級的大型、重型運載火箭,可以大幅減少發射次數和LEO軌道的交會對接組裝次數,有效降低載人小行星探測任務實施的難度和復雜程度,提高我國實施載人小行星探測任務的能力,擴大載人探測所能觸及到的小行星的數量和范圍。目前,美國載人小行星探測所考慮的運載火箭中,最大LEO運載能力為戰神-5(Ares -5)火箭的130 t[8]。
4.2載人小行星探測的關鍵技術
結合載人小行星探測任務特點,其所涉及的關鍵技術主要有以下6項。
1)推進技術
目前,采用化學推進的載人探測器組合體質量規模在百噸級至千噸級。采用先進推進技術,例如電推進、核推進等高比沖推進技術,可以大幅降低探測器質量規模。但是電推進的推力較小,核推進存在輻射安全性的問題。載人小行星探測中,可以考慮將電推進技術和連續推力軌道技術相結合,在星際轉移飛行階段使用連續電推力推進,以降低推進劑消耗量。針對核推進的輻射安全性問題,可以考慮在推進艙加裝防輻射板以保護航天員;而推進艙被拋離后可以在一定的變軌推力作用下飛向太陽,將核廢料運送至太陽附近,以減小對太空環境的影響。鑒于高比沖和大推力的特點,未來核推進是一個重點發展的方向,目前美俄均在研制試驗核推進器(如圖5)[9]。另外,國內也有研究提出將幾種推進技術進行組合應用[9]。
2)星際飛行安全保障技術
長期的星際飛行給安全保障帶來了一些新的挑戰,航天員將會面臨銀河射線、太陽耀斑、在飛行初始和結束時段的地球輻射帶等3種輻射威脅,面臨亞磁環境的影響。同時,星際微生物菌落會造成多種醫學和技術風險,并可能嚴重影響飛行任務的安全和硬件可靠性。此外,星際空間的隕石也具有潛在的威脅[7]。未來可以分別考慮安裝輻射屏蔽材料,在飛船內建立恒磁場,對載人探測器內外進行菌落檢測和消毒,實現探測器對航天員的身體健康狀況實時監控以及地面的遠程監控、預防、診療,在探測器外表面加裝空間碎片及隕石防護層等措施,為航天員與探測器在星際飛行中面臨的輻射安全、亞磁安全、生物安全、醫療安全、隕石安全等問題提供安全保障。
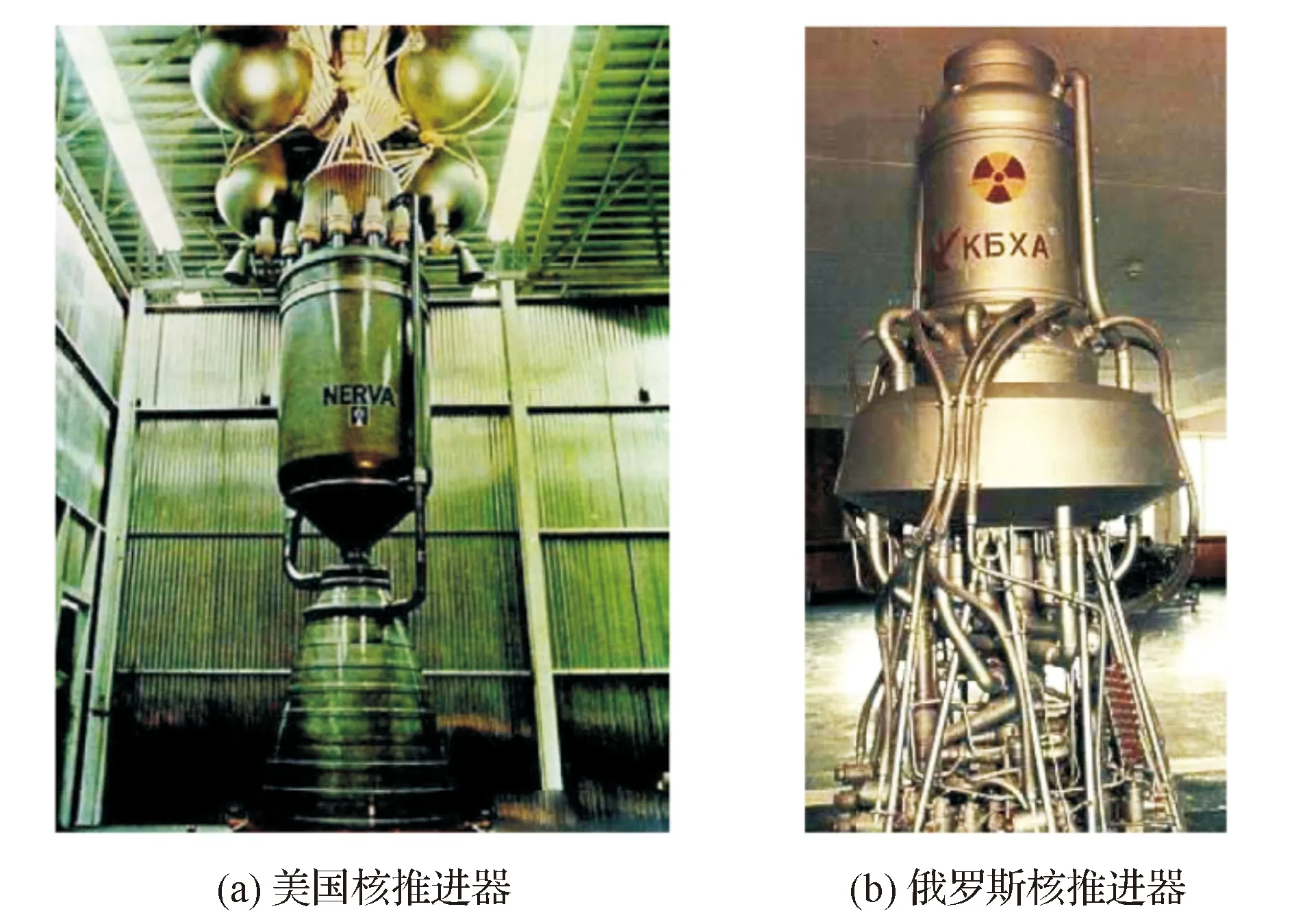
圖5 國外研制中的核推進器
3)小行星表面行走技術
在微重力的情況下,航天員如何開展出艙活動,如何在小行星表面行走并對其開展表面探測,是載人小行星探測需要解決的問題。目前,美國載人小行星探測方案中,采用了固定桿輔助航天員進行定位和行走(見圖6)[3],航天員將固定桿定位至小行星表面,通過系繩將自己約束在固定桿附近的區域內進行行走和探測。

圖6 美國航天員小行星表面行走方案設想
國內也有研究載人小行星探測表面行走的方案,主要包含爬行式、跳躍式等。[10]爬行式方案中,小行星表面預先固定了一張緊貼星體表面的網,航天員通過在網狀結構上爬行實現行走;跳躍式方案中,小行星表面預先設置固定一張網狀的帳篷,其與星體表面之間存在一個空間,航天員在該空間內進行跳躍式行走。
4)小行星表面附著技術
近地小行星幾乎沒有重力,因此在小行星表面軟著陸后,如何將著陸器固定在小行星表面防止其逃逸,是附著技術需要研究解決的。目前在附著機構方面已有學者對錨機構進行了研究[11-12]。錨機構主要分為錨體和錨定位系統兩部分,其基本工作方式是:錨體以一定的方式滲入星體表面并附著定位,錨體通過一定方式與錨定位系統連接,錨體和著陸器之間通過錨定位系統將著陸器固定在星體表面。錨體滲入的方式有鉆孔式和熔化成孔式2種;錨體和錨定位系統的連接方式有線繩連接式和伸縮套管連接式2種[12]。錨機構類型的選用,應根據目標星體的地質狀況而確定。
5)GNC技術
小行星與地球的距離較遠,探測器與地球通信信號延時長,有時信號受到小行星或其它星體的遮擋,無法抵達地球,需要引入自主導航與控制技術。在星際轉移飛行段,探測器可以基于太陽進行自主導航;在接近小行星的飛行階段,如與小行星交會和著陸的時段,應轉入基于目標小行星的高精度自主導航。類似的自主導航方案,在美國深空-1探測器和日本隼鳥號探測器中,都進行了試驗和應用[2,13]。同時,對于載人小行星探測器,還應引入航天員手動導航與控制技術,在著陸和飛離小行星的飛行過程中,航天員可以手動對探測器進行導航和控制。其可作為自主導航與控制系統的備份。
6)再生式環控生保技術
載人小行星探測的飛行任務時間較長,為幾十天至百天,須采用再生式環控生保技術,以減少航天員所需攜帶的消耗品,降低探測器的質量規模。目前再生式環控生保技術主要有物理化學再生式生保和受控生態生保兩類。其中,前者適合中、長期的飛行任務,已經應用于和平號空間站和“國際空間站”中;后者適合長期地球飛行和地外星球探測飛行[14],但仍需要較長時間的研究、試驗和驗證,才可進行實際應用。未來載人小行星探測中,可充分采用物理化學再生式生保技術。對于受控生態生保技術的應用,須根據其發展情況而定。
5 結束語
載人小行星探測已成為21世紀載人深空探測的熱點研究領域。本文基于這一背景,對目前載人小行星探測的發展現狀進行了描述,對其任務特點進行了分析。針對載人小行星探測自身的特點,給出了任務實施途徑建議和關鍵技術討論。本文的研究成果可為我國載人航天發展戰略規劃提供參考。
References)
[1]Prockter L,Murchie S,Cheng A,et al. The NEAR shoemaker mission to asteroid 433 eros[J]. Acta Astronautica,2002,51:1-9
[2]Takashi Kubota,Tatsuaki Hashimoto,Shujiro Sawai,et al. An autonomous navigation and guidance system for MUSES-C asteroid landing[J]. Acta Astronautica,2003,52(2-6):125-131
[3]Landis R R,Korsmeyer D J,Abell P A,et al. A piloted flight to a near-earth object:A feasibility study,NASA-20070024872[R]. Washington D.C.:NASA,2010
[4]Dan Z,Sam W,Bong W. The first human asteroid mission:Target selection and conceptual mission design,AIAA 2010-8370[R]. Washington D.C.:AIAA, 2010
[5]王悅,劉歡,王開強,等. 載人探測小行星的目標星選擇[J]. 航天器工程,2012,21(6):30-36
Wang Yue,Liu Huan,Wang Kaiqiang,et al. Target selection for human exploration of asteroid[J]. Spacecraft Engineering,2012,21(6):30-36 (in Chinese)
[6]Sam W,Dan Z,Bong W. Preliminary design of a crewed mission to asteroid apophis in 2029-2036,AIAA 2010-8374[R]. Washington D.C.:AIAA,2010
[7]A·C·卡拉杰耶夫. 載人火星探測[M]. 趙春潮,王蘋,魏勇,譯.北京:中國宇航出版社,2010
A C KopoTeeB.Mars exploration[M].Zhao Chunchao,Wang Ping,Wei Yong, translated. Beijing:China Astronautics Press,2010 (in Chinese)
[8]佟艷春. 美國重返月球計劃的新型運載火箭[J]. 導彈及航天運載技術,2007(2):14-17
Tong Yanchun. New launch vehicles for US plan to return to Moon[J]. Missile and Space Vehicle,2007(2):14-17 (in Chinese)
[9]李志海,張柏楠,楊宏,等. 載人小行星探測推進技術初步方案設想[J]. 國際太空,2013(7):32-37
Li Zhihai, Zhang Bainan, Yang Hong, et al. Preliminary scheme of propulsion technology for manned asteroid mission exploration[J]. Space International,2013(7):32-37 (in Chinese)
[10]武江凱,白明生,石泳. 載人小行星探測表面行走方案設計研究[C]//第二屆載人航天學術大會論文集. 北京:中國載人航天工程辦公室,2012:23-27
Wu Jiangkai,Bai Mingsheng,Shi Yong. Research on design of surface walking scheme for human exploration of asteroid[C]//Proceedings of the 2rd Scientific Conference of Manned Spaceflight. Beijing:China Manned Space Agency(CMSA),2012:23-27 (in Chinese)
[11]Yang Gao,Alex Ellery,Mustafa Jaddou,et al. Planetary micro-penetrator concept study with biomimetric drill and sampler design[J]. IEEE Transactions on Aerospace and Electronic Systems,2007,43(3):875-885
[12]趙志軍,趙京東,高曉輝. 小行星著陸器錨定位研究[J]. 機械與電子,2009(10):6-9
Zhao Zhijun,Zhao Jingdong,Gao Xiaohui. Research of the asteroid lander anchoring[J]. Machinery & Electronics,2009(10):6-9 (in Chinese)
[13]Rayman M D,Philip V,Lehman D H,et al. Results from the Deep Space 1 technology validation mission[J]. Acta Astronautica,2000,47(2/9):475-487
[14]周抗寒,傅嵐,韓永強, 等. 再生式環控生保技術研究及進展[J]. 航天醫學與醫學工程,2003,16(z1):566-572
Zhou Kanghan,Fu Lan,Han Yongqiang,et al. Research and development of technique of regenerative environmental control and life support system[J]. Space Medicine & Medical Engineering,2003,16(z1):566-572 (in Chinese)
(編輯:李多)
Characters and Technological Approach of Human Asteroid Exploration Mission
WANG Kaiqiang ZHANG Bainan WANG Yue LIU Huan WU Jiangkai LI Zhihai
(Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China)
The development of human asteroid exploration is reviewed, the conceptual design of the only human asteroid exploration program based on Orion Crew Exploration Vehicle from America is described, including exploration system architecture, launch vehicles and flight scenario. The character of human asteroid exploration mission is analyzed from the aspects such as velocity increment and target gravity, which are compared with those of human Mars exploration, human lunar exploration, and robotic asteroid exploration. Some suggestions are given on the implementation approach to human asteroid exploration mission, including target selection and system design of manned spacecraft.The relevant key technologies involved in the mission are discussed, such as propulsion, safety support during interplanetary flight, walking on an asteroid. This paper can be provided as a reference for strategic programming of Chinese human deep space exploration.
human asteroid exploration; mission character; implementation approach; key technology
2013-11-20;
:2014-02-24
國家重大航天工程
王開強,男,博士研究生,主要從事航天器總體設計方向研究。Email:wangkaiqiang1988@163.com。
V476
:ADOI:10.3969/j.issn.1673-8748.2014.03.019