帶有慣性敏感元件的新型陀螺測試轉(zhuǎn)臺系統(tǒng)控制器設(shè)計
2014-07-19 10:14:16楊亞非
中國慣性技術(shù)學(xué)報 2014年1期
關(guān)鍵詞:測量
楊亞非,張 翔
(哈爾濱工業(yè)大學(xué) 控制與仿真中心,哈爾濱 150080)
帶有慣性敏感元件的新型陀螺測試轉(zhuǎn)臺系統(tǒng)控制器設(shè)計
楊亞非,張 翔
(哈爾濱工業(yè)大學(xué) 控制與仿真中心,哈爾濱 150080)
傳統(tǒng)原理的陀螺測試轉(zhuǎn)臺使用測角元件測量轉(zhuǎn)臺的角速率,其精度與所選的角度(或時間)間隔關(guān)系極大,即使綜合使用各種控制方法也難以達到理想的速率精度和速率平穩(wěn)性。提出一種新的測速原理,將慣性敏感元件引入轉(zhuǎn)臺測試系統(tǒng)測量瞬時角速率,瞬時速率能夠很好地反映速率精度和速率平穩(wěn)性,通過反饋與控制瞬時角速率信息提高轉(zhuǎn)臺的速率精度和速率平穩(wěn)性。探討了帶有慣性敏感元件的新型轉(zhuǎn)臺的控制系統(tǒng)組成,進行控制系統(tǒng)設(shè)計時,將閉環(huán)系統(tǒng)按功能劃分成測量回路和穩(wěn)定回路,并運用數(shù)字控制解決控制器綜合問題,使用Matlab軟件分析系統(tǒng)主要變量響應(yīng)過程。最后,由控制器設(shè)計過程和所得模型分析結(jié)果證實,相對傳統(tǒng)轉(zhuǎn)臺,新型轉(zhuǎn)臺的數(shù)字控制系統(tǒng)具有較高魯棒性,響應(yīng)時間縮短為0.15 s,更適宜于陀螺儀表的動態(tài)測試。
陀螺儀表;瞬時角速率;速率精度;速率平穩(wěn)性;控制器綜合
在現(xiàn)有技術(shù)條件下,提高陀螺測試轉(zhuǎn)臺的精度是提高陀螺儀精度的有效途徑。速率精度和速率平穩(wěn)性是轉(zhuǎn)臺最重要的性能指標(biāo)。目前,現(xiàn)有轉(zhuǎn)臺通常使用各種測角元件測得轉(zhuǎn)臺的平均角速率信息,綜合各種控制方法補償有害因素,提高轉(zhuǎn)臺的速率精度和速率平穩(wěn)性指標(biāo),然而,測得的平均速率信息并不是瞬時角速率,所以不能真正反映這兩項指標(biāo)的好壞。傳統(tǒng)轉(zhuǎn)臺還有一大弊端,那就是采用大轉(zhuǎn)動慣量的主軸來提高速率平穩(wěn)性,這樣不僅增加了轉(zhuǎn)臺功耗,也使其加減速性能變差,無法達到速率的快速穩(wěn)定[1]。
本文在借鑒國外先進測試轉(zhuǎn)臺工作原理的基礎(chǔ)上,提出將高精度慣性敏感元件引入到轉(zhuǎn)臺測試系統(tǒng)中測量轉(zhuǎn)臺瞬時角速率。在進行系統(tǒng)回路控制器設(shè)計時,按照功能原理將轉(zhuǎn)臺控制回路分為測量回路與穩(wěn)定回路分別進行控制器綜合設(shè)計。最后利用Matlab軟件對所得結(jié)果進行仿真驗證,并對所得結(jié)果進行分析。
1 傳統(tǒng)轉(zhuǎn)臺的控制系統(tǒng)
轉(zhuǎn)臺是一個典型的伺服系統(tǒng),為陀螺儀表測試提供速率基準(zhǔn)。按照反饋信息劃分,常見的有位置反饋和速度反饋系統(tǒng),帶有位置和速度反饋的系統(tǒng)結(jié)構(gòu)框示于圖 1。帶有速度反饋和純積分環(huán)節(jié)的的伺服系統(tǒng)可以較好的抑制摩擦力矩對轉(zhuǎn)動的影響,有效的改善系統(tǒng)的低速性能[2]。轉(zhuǎn)臺轉(zhuǎn)動的加速度信息也可以用于反饋,尤其是當(dāng)轉(zhuǎn)臺低速轉(zhuǎn)動,加速度變化較明顯時,加速度反饋可以有效抑制轉(zhuǎn)臺軸系的干擾力矩,減小低速狀態(tài)下速率的波動[3]。
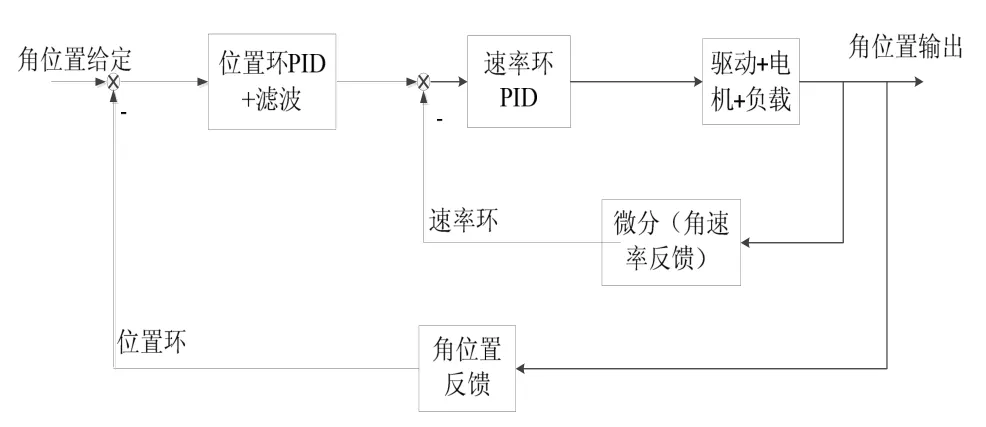
圖1 帶有位置和速度反饋的系統(tǒng)結(jié)構(gòu)框圖Fig.1 Structural scheme of system with position and rate feedback
轉(zhuǎn)臺的控制主要采用傳統(tǒng)PID控制和包括魯棒重復(fù)控制、自適應(yīng)控制等在內(nèi)的先進控制算法。傳統(tǒng)PID控制是最成熟、實際使用最廣泛的控制方法,優(yōu)點是簡單易行、調(diào)節(jié)方便,且滿足絕大多數(shù)控制系統(tǒng)的要求[4],缺點是參數(shù)調(diào)節(jié)依賴于人為經(jīng)驗。PID控制后又發(fā)展衍生出數(shù)字PID[5]等控制算法,可以滿足系統(tǒng)對穩(wěn)定性能和動態(tài)性能的要求。先進控制算法研究較為廣泛,眾所周知,影響轉(zhuǎn)臺速率精度和速率平穩(wěn)性的主要因素包括軸系的摩擦力矩、驅(qū)動電機的換向力矩和齒槽力矩、測量反饋元件的周期性誤差以及負(fù)載的不平衡力矩等。各種因素對轉(zhuǎn)臺轉(zhuǎn)動的影響不盡相同,以轉(zhuǎn)臺驅(qū)動電機的換向力矩為例,由其產(chǎn)生的機理可知,其是轉(zhuǎn)臺角位置的函數(shù),因此為了抑制和消除電磁干擾力矩,可以使用混合魯棒重復(fù)重復(fù)控制、自適應(yīng)逆控制等先進控制方法。
2 新型轉(zhuǎn)臺的控制系統(tǒng)系統(tǒng)組成
基于以上分析,盡管傳統(tǒng)轉(zhuǎn)臺采用各種控制方式以使測試轉(zhuǎn)臺系統(tǒng)達到最佳的控制效果,但是由于傳統(tǒng)轉(zhuǎn)臺使用的測角元件是光電編碼器、旋轉(zhuǎn)變壓器或感應(yīng)同步器等類型的測角元件,嚴(yán)格意義上說,測量得到的是某一時間間隔或角度間隔內(nèi)的平均角速率,而不是轉(zhuǎn)臺的瞬時角速率信息,而只有瞬時角速率才真正反映轉(zhuǎn)臺的速率精度和速率平穩(wěn)性。因此,考慮將高精度慣性敏感元件引入到轉(zhuǎn)臺系統(tǒng)中測量平臺瞬時角速率。通過對瞬時速率進行測量、反饋和控制達到提高轉(zhuǎn)臺速率精度和速率平穩(wěn)性的目的[6-8]。
新型轉(zhuǎn)臺在放置被測儀器的平臺下方增加一個與主軸相連的圓盤,用于安裝引入的慣性敏感元件[9]。角速度傳感器固定在圓盤正中,其敏感軸沿主軸方向,用于測量轉(zhuǎn)臺低速轉(zhuǎn)動時的瞬時角速率。在圓盤邊緣對稱固定三個向心加速度計和三個切向加速度計,每兩個同類加速度計的安裝半徑呈120°分布,分別用于測量向心加速度和切向加速度,以此得出轉(zhuǎn)臺轉(zhuǎn)動的瞬時角速率和角加速度。
綜合考慮引入的角速度傳感器的動態(tài)誤差以及加速度計的測量范圍和靈敏閾,確定測試轉(zhuǎn)臺系統(tǒng)可以工作在低速模式和高速模式。低速模式的速率范圍為0.01~30 (°)/s,系統(tǒng)的慣性敏感元件為角速度傳感器和切向加速度計;高速模式的速率范圍為30~1200 (°)/s,系統(tǒng)的慣性敏感元件為向心加速度計和切向加速度計。
根據(jù)以上的功能原理,并且結(jié)合國外研制的陀螺轉(zhuǎn)臺,得出如圖2所示的低速模式下系統(tǒng)結(jié)構(gòu)框圖。圖中包含的符號意義為:分別是干擾力矩、平臺穩(wěn)定軸的角速度和角速度傳感器的進動角速度;Mω,Mε是沿測量元件敏感軸產(chǎn)生的陀螺力矩;Mdm是驅(qū)動電機力矩,是控制力矩;β,βτ,βC以及是敏感元件進動角以及簡化為這些角度的噪聲干擾;uω既是敏感元件的信號uAVS的在低速模式下數(shù)字表示,也是加速度計1c~3c的信號uc的在高速模式下數(shù)字表示的平方根之和,uε是加速度計1τ~ 3τ的信號uτ的數(shù)字表示的總和。
根據(jù)實現(xiàn)功能的不同,并且從便于控制器設(shè)計出發(fā),將轉(zhuǎn)臺閉合回路劃分成測量回路和穩(wěn)定回路兩個部分。測量回路用于測量角速度傳感器和加速度計的輸出信息,將輸出信息一方面用于反饋控制,傳遞給控制器形成控制作用,另一方面閉環(huán)測量回路整體作為穩(wěn)定回路的一個功能元件,將信息提供給穩(wěn)定回路用于保證轉(zhuǎn)臺系統(tǒng)的穩(wěn)定性。由于低速模式和高速模式的分析思路基本相同,只是系統(tǒng)中慣性敏感元件不同,因此本文以下的分析均以低速模式為例進行介紹。
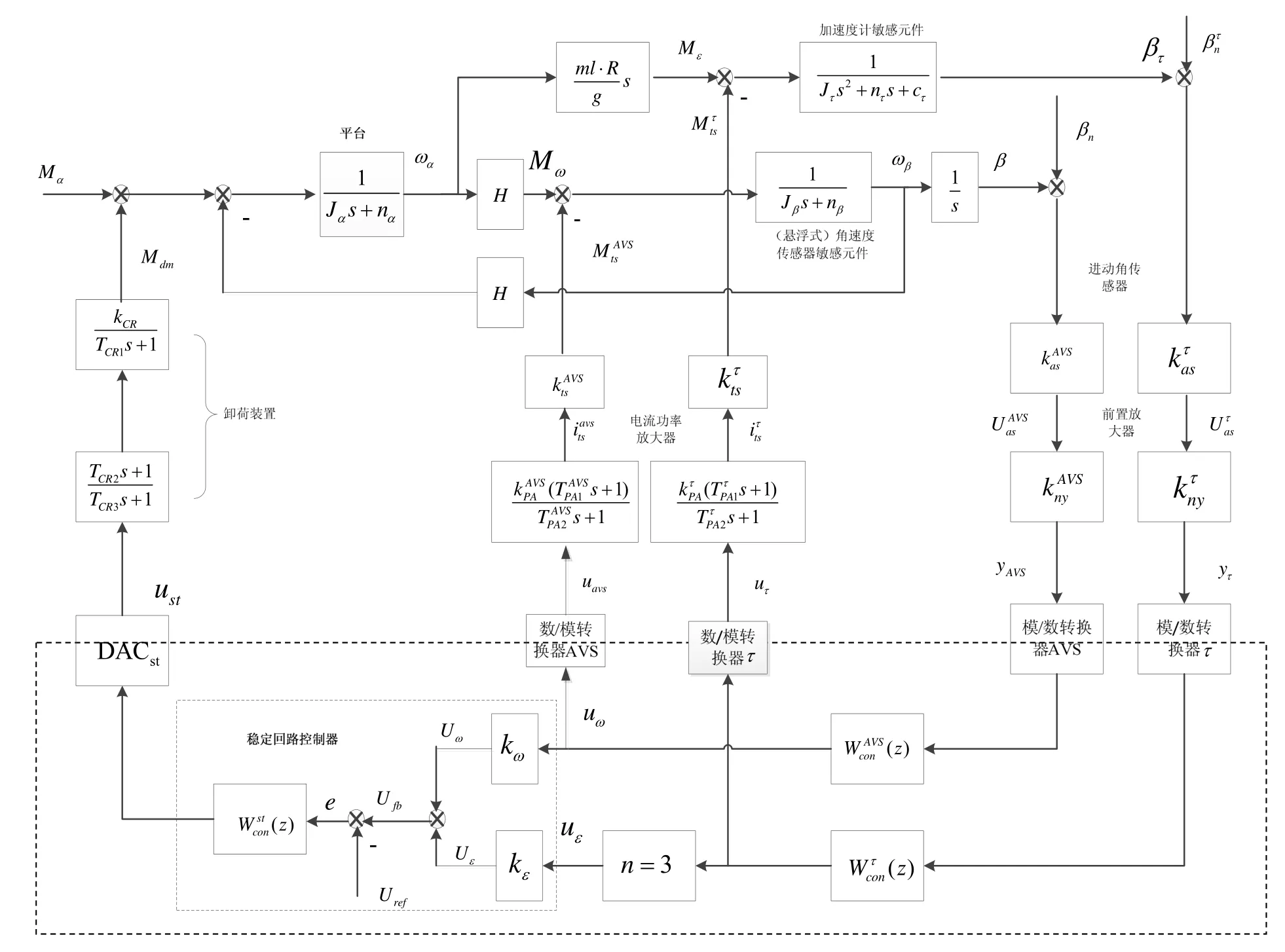
圖2 低速模式下測試轉(zhuǎn)臺的控制系統(tǒng)結(jié)構(gòu)框圖Fig.2 Structural diagram of the test turntable’s control system in the low-rate mode
3 測量回路控制器設(shè)計
由于傳統(tǒng)的模擬控制無法在線重調(diào)整參數(shù),無法根據(jù)任意定律測量和指定轉(zhuǎn)臺角速度,而數(shù)字控制具有控制算法靈活,便于在線修改控制參數(shù)和可靠性高的優(yōu)點,因此提出用數(shù)字控制代替模擬控制,解決控制器的綜合和設(shè)計問題[10]。測量回路控制器的設(shè)計步驟如下:
1)根據(jù)結(jié)構(gòu)原理圖,選定狀態(tài)變量構(gòu)建角速度傳感器回路對象的微分方程。
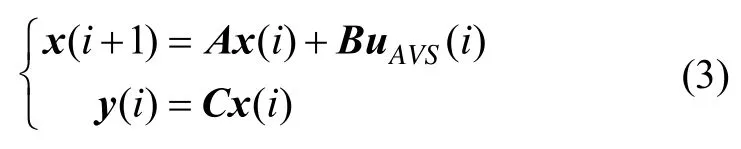
由圖2得,角速度傳感器測量回路的被控對象為角速度傳感器和前置放大器,對象的控制輸入是數(shù)/模轉(zhuǎn)換器的輸出信號uavs,被測輸出是前置放大器的輸出yAVS。取狀態(tài)變量為yAVS,β,和輔助變量,得到角速度傳感器回路的狀態(tài)方程:


2)考慮量化頻率,將建立的狀態(tài)空間模型轉(zhuǎn)化為離散模型。
在t=ih時刻,由模/數(shù)轉(zhuǎn)換器對被測輸出進行轉(zhuǎn)換,h是離散化周期。轉(zhuǎn)臺系統(tǒng)中頻率最高的元件是加速度計,將系統(tǒng)時鐘頻率選取為比加速度計閉環(huán)回路的期望通頻帶上限大得多的值,定為10 kHz。選取離散化周期時,保證離散化后系統(tǒng)仍是穩(wěn)定的,鑒于確定好系統(tǒng)的時鐘頻率為 10 kHz,故取。
由已建立好的數(shù)學(xué)模型(2),考慮一個周期內(nèi)的控制延遲,將其離散化得到:
3)根據(jù)延遲模型,引入離散積分器以實現(xiàn)無靜差,擴展得到新的離散模型。
增加帶有系數(shù)φ的離散積分器為。由于控制延遲,引入輔助變量,并將其作為控制器。引入擴展?fàn)顟B(tài)向量以及新的被測輸出,根據(jù)式(3)得出新的離散系統(tǒng):

4)運用龍伯格最小維觀測的原理,建立測量系統(tǒng)最低階輸出的動態(tài)控制器。
結(jié)合龍伯格降維觀測器的原理,寫出測量最低階輸出的動態(tài)控制器方程:

式中,正定對稱矩陣P、S是Riccati方程的解:
其中,正定陣Q、Ψ是某一加權(quán)矩陣。為了構(gòu)建控制器模型,把分塊得,控制器(6)表示成:


4 穩(wěn)定回路控制器設(shè)計
穩(wěn)定回路控制系統(tǒng)設(shè)計包括確定轉(zhuǎn)換系數(shù)和設(shè)計穩(wěn)定回路控制器兩部分。
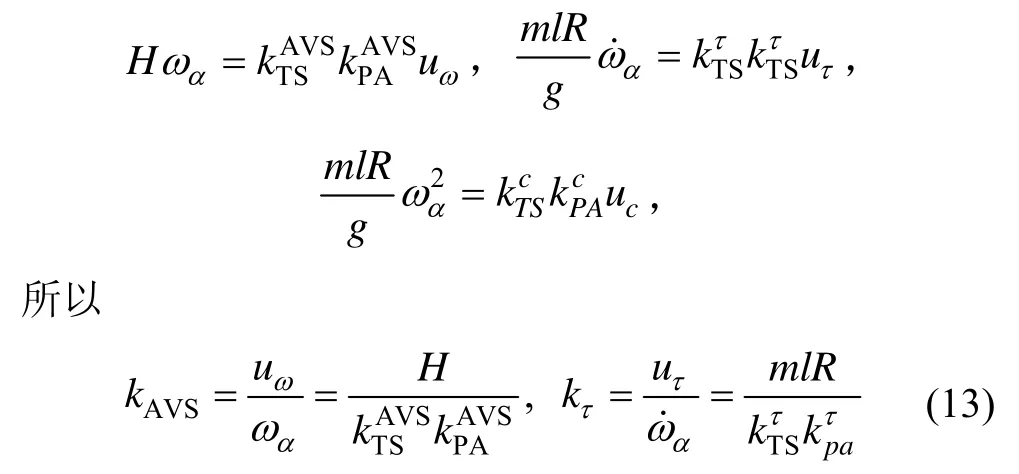
根據(jù)回路的無靜差性確定穩(wěn)定回路轉(zhuǎn)換系數(shù)。測量回路中對應(yīng)力矩關(guān)系有:
測量回路將測得角速度信息傳入穩(wěn)定回路,保證系統(tǒng)的穩(wěn)定性,再考慮阻力矩最小化裝置和測試平臺,省略不必要的環(huán)節(jié),得出穩(wěn)定回路的結(jié)構(gòu)框圖如圖 3所示。
穩(wěn)定回路控制器使用離散PID控制器,滿足無靜差要求。先求出模擬形式的控制器。
斷開圖3主反饋,求得開環(huán)傳遞函數(shù)為:

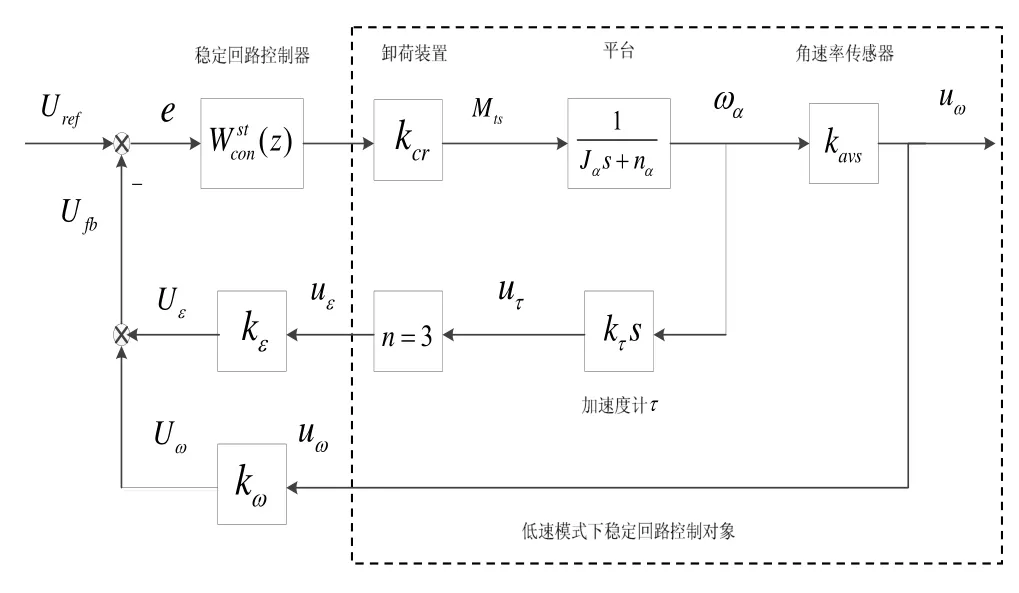
圖3 低速模式穩(wěn)定回路結(jié)構(gòu)框圖Fig.3 Structure of stabilization loop in the low rate mode

離散PID控制器為:

將已有轉(zhuǎn)臺功能元件參數(shù)代入到控制器方程中,得出穩(wěn)定回路控制器為:

5 仿真結(jié)果分析
以角速度傳感器測量回路為例,寫出其開環(huán)傳遞函數(shù),得出角速度傳感器測量回路Bode圖如圖4所示。由圖4得出,角速度傳感器測量回路的相角裕度約為 45°,可以認(rèn)為引入測量回路控制器后,角速度傳感器測量回路具有高魯棒性。對加速度計測量回路進行分析,也可以得到相同結(jié)論,由此構(gòu)成的數(shù)字控制系統(tǒng)可具有高魯棒性。

圖4 角速度傳感器測量回路Bode圖Fig.4 Bode diagram of the angular velocity sensor measurement loop
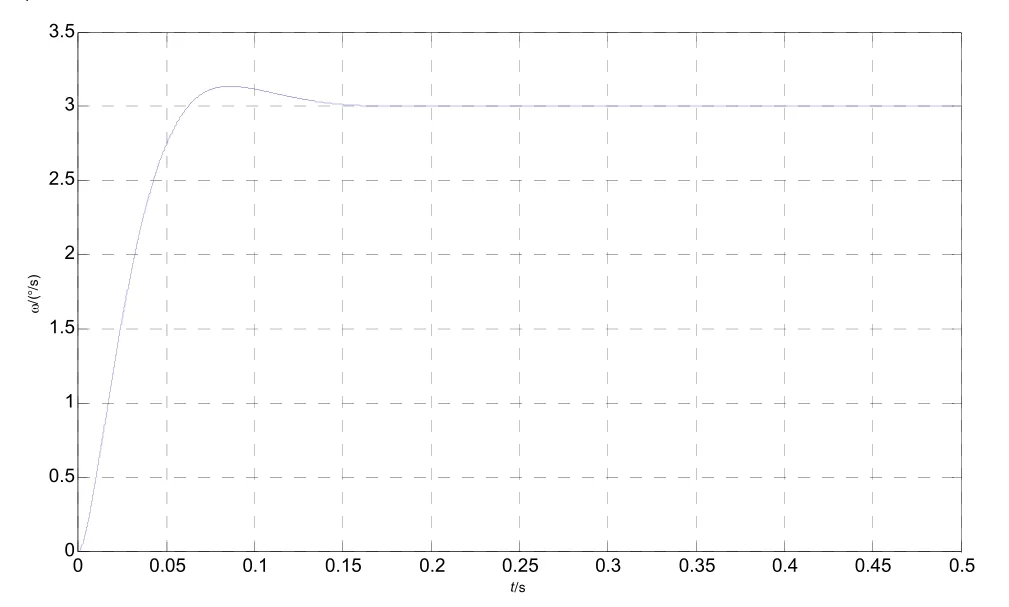
圖5 轉(zhuǎn)臺主軸轉(zhuǎn)速的階躍響應(yīng)Fig.5 Step response of the turntable’s main axis angular rate
傳統(tǒng)轉(zhuǎn)臺的完整控制系統(tǒng)結(jié)構(gòu)示于圖 6,系統(tǒng)包括電流環(huán)、速度環(huán)和位置環(huán),根據(jù)系統(tǒng)建模可得速度環(huán)的閉環(huán)傳遞函數(shù)為:

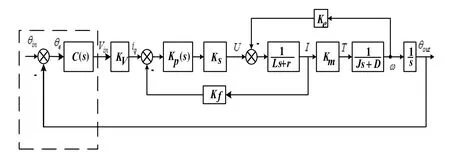
圖6 傳統(tǒng)轉(zhuǎn)臺控制系統(tǒng)結(jié)構(gòu)框圖Fig.6 Block diagram of conventional turntable’s control system
對速度環(huán)的階躍響應(yīng)進行仿真,結(jié)果示于圖 7。可以看出,僅考慮速度環(huán)調(diào)節(jié)效果時,傳統(tǒng)轉(zhuǎn)臺速度環(huán)輸出ω超調(diào)量約為13%,有10%的穩(wěn)態(tài)誤差,響應(yīng)時間約為9 s。

圖7 傳統(tǒng)轉(zhuǎn)臺速度環(huán)階躍響應(yīng)Fig.7 Step response of conventional turntable’s velocity loop
6 結(jié) 論
根據(jù)對轉(zhuǎn)臺系統(tǒng)的測量回路和穩(wěn)定回路控制器的設(shè)計過程和Matlab軟件仿真結(jié)果,可以得出如下結(jié)論:
1)引入慣性敏感元件測量轉(zhuǎn)臺的瞬時角速率,并對其進行反饋和控制,可以提高轉(zhuǎn)臺的速率精度和速率平穩(wěn)性。
2)由于引入了穩(wěn)定回路,保證了轉(zhuǎn)臺閉環(huán)系統(tǒng)以及每個子回路具有良好的魯棒性。
3)根據(jù)轉(zhuǎn)臺主軸轉(zhuǎn)速的階躍響應(yīng),得出由于將慣性器件引入到轉(zhuǎn)臺測試系統(tǒng)中,不必通過主軸的大轉(zhuǎn)動慣量保證速率平穩(wěn)性指標(biāo),因此轉(zhuǎn)臺的重量大幅減小。
仿真結(jié)果表明,響應(yīng)時間可減小到0.15 s,可以實現(xiàn)轉(zhuǎn)速的快速調(diào)節(jié)和穩(wěn)定,有利于陀螺儀表的動態(tài)測試,并且能顯著縮短測試和標(biāo)定時間。本文研究的新型轉(zhuǎn)臺順應(yīng)了慣性器件測試設(shè)備小型化和高精度化的趨勢,可以為今后新型轉(zhuǎn)臺的研制提供一定的借鑒。
(References):
[1]金濤,劉樾.對發(fā)展我國慣性測試技術(shù)的幾點思考[J].航空精密制造技術(shù),2006,42(5):8-9.JIN Tao,LIU Yue.Thoughts on the development of the domestic inertial test technology[J].Aviation Precision Manufacturing Technology,2006,42(5):8-9.
[2]李擁軍,楊文淑,范永坤,等.高精度轉(zhuǎn)臺摩擦力矩補償控制器設(shè)計與仿真[J].光電工程, 2008,35(12):126-130.LI Yong-jun,YANG Wen-shu,FAN Yong-kun,et al.Controller design and simulation for friction moment compensation on high-precision turntable[J].Opto-Electronic Engineering,2008,35(12):126-130.
[3]徐國柱,劉樾,孟凡軍.利用加速度反饋改善轉(zhuǎn)臺低速性能[J].中國慣性技術(shù)學(xué)報,2008,16(4):502-504.XU Guo-zhu,LIU Yue,MENG Fan-jun.Improving low-rate performance of turntable by acceleration feedback [J].Journal of Chinese Inertial Technology,2008,16(4):502-504.
[4]Haidekker M A.Linear feedback controls[M].London,UK:Elsevier,2013:193-208.
[5]Papadopoulosa K G,Tselepisb N D,Margaris N I.Type-III closed loop control systems-Digital PID controller design[J].Journal of Process Control,2013,23(10):1401-1414.
[6]Yang Yafei,Zhang Xiang,Li Jianguo.Mechanism analysis of instantaneous angular-rate measurement of gyro-test turntable with inertial devices[C]//Proceeding of the 8th International Symposium on Precision Engineering Measurements and Instrumentation.2012.
[7]楊亞非,張翔.帶有慣性敏感器件的新型陀螺測試轉(zhuǎn)臺系統(tǒng)建模[J].中國慣性技術(shù)學(xué)報, 2013,21(6):111-116 YANG Ya-fei,ZHANG Xiang.System modeling for new type of gyro-test turntable with inertial sensors[J].Journal of Chinese Inertial Technology,2013,21(6):111- 116.
[8]Кaпиxмaн Д M.陀螺儀表動態(tài)測試用精密控制轉(zhuǎn)臺[M].楊亞非,張明華,譯.哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2013:21-60.
[9]Deputatuva E A,Kalikhman D M,Polushkin A V,et al.Digital stabilization of motion of precision controlled base platforms with inertial sensitive elements.I.Application of float angular velocity sensor[J].Journal of Computer and Systems Sciences International,2011,50(1):117-129.
[10]Deputatuva E A,Kalikhman D M,Polushkin A V,et al.Digital stabilization of motion of precision controlled base platforms with inertial sensitive elements.II.Application of float angular velocity sensor and pendulum accelerometer[J].Journal of Computer and Systems Sciences International,2011,50(2):309-324.
Controller design for a new type of gyro-test turntable with inertial sensors
YANG Ya-fei,ZHANG Xiang
(Control and Simulation Center,Harbin Institute of Technology,Harbin 150080,China)
Angle measuring devices are used to measure the angular velocity of gyro test turntables with traditional principle whose precision has great relation with the chosen angle (or timeinterval).Though various control methods are applied to increase the turntable’s rate accuracy and rate stability,yet the test and control precision obtained is not quite satisfactory.A new principle of measuring the velocity is proposed which introduces inertial sensitive devices into the system and increases the rate accuracy and rate stability through the feedback and control of instantaneous velocity to truly reflect rate accuracy and rate stability of the turntable.The control system composition with inertial sensitive devices is discussed.When conducting the design for the system,the closed loop is divided into the measurement loop and stabilization loop,and digital control is applied to solve the problem of controller synthesis.Matlab is used to analyze the response process of the main variable in the system.Lastly,along with the controller design and analysis of the obtained model,it is verified that in comparison with the traditional turntable,the new turntable system has better robustness,the response time is 0.15 s,and the turntable is more suitable for gyro’s dynamic test.
gyroscopes;instantaneous angular rate;rate accuracy;rate stability;controller synthesis
TP273
:A
1005-6734(2014)01-0135-06
10.13695/j.cnki.12-1222/o3.2014.01.027
2013-09-22;
:2014-01-02
楊亞非(1968—),男,博士,副教授,研究方向為導(dǎo)航、制導(dǎo)與控制。E-mail:yafei@hit.edu.cn
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00