圓柱滾子軸承零件幾何誤差對載荷分布的影響
2014-07-22 00:45:16王寶坤毛范海孫守林王德倫
軸承 2014年2期
關(guān)鍵詞:模型
王寶坤,毛范海,孫守林,王德倫
(大連理工大學(xué) 機(jī)械工程學(xué)院,遼寧 大連 116024)
軸承載荷分布是描述其力學(xué)特性的重要方法。盡管軸承零件具有較高的制造精度,但依然存在誤差,使載荷分布產(chǎn)生差異,導(dǎo)致軸承承受沖擊載荷,降低軸承壽命。
國外學(xué)者已經(jīng)做了大量有關(guān)軸承的研究工作,文獻(xiàn)[1]建立了不考慮誤差情況下的軸承載荷分布模型;文獻(xiàn) [2]用有限元方法研究了圓柱滾子軸承套圈的應(yīng)力與變形分布;文獻(xiàn)[3]研究了滾動(dòng)體誤差對保持架回轉(zhuǎn)中心軌跡及軸承振動(dòng)的影響;文獻(xiàn)[4]研究了軸承零件形狀誤差與軸心軌跡的關(guān)系。國內(nèi)學(xué)者也對軸承做了深入研究。文獻(xiàn) [5]研究了軸承載荷與變形的關(guān)系,建立軸承載荷分布計(jì)算模型。文獻(xiàn) [6]研究了Hertz接觸理論,通過試驗(yàn)得到圓柱滾子與滾道接觸的修正公式。文獻(xiàn)[7-8]研究了基于套圈輪廓的軸承旋轉(zhuǎn)精度預(yù)測。
引入函數(shù)描述零件幾何誤差,建立考慮幾何誤差的軸承力學(xué)模型。研究單一誤差及多種誤差對載荷分布的影響,探討不同類型誤差組合對軸承載荷分布的影響規(guī)律。
1 力學(xué)模型的假設(shè)與等效
1.1 模型假設(shè)
為簡化計(jì)算,建立軸承力學(xué)模型時(shí)假設(shè):
(1)滾子僅存在直徑尺寸誤差;
(2)套圈滾道存在尺寸誤差與幾何形狀誤差;
(3)采用剛性套圈,即滾子與滾道的接觸作用不會(huì)引起套圈整體變形;
(4)將軸承三維模型簡化為二維模型,不考慮零件軸向效應(yīng)及材料屬性(如晶粒不均勻等)的影響。
1.2 剛度等效
基于模型假設(shè),將每個(gè)滾子等效為2根彈簧,2根彈簧通過滾子中心節(jié)點(diǎn)連接,彈簧剛度分別為滾子與內(nèi)、外圈滾道的接觸剛度。等效彈簧為非線性彈簧,彈簧剛度與接觸載荷有關(guān)。根據(jù)Hertz接觸理論,滾子與內(nèi)、外圈滾道的接觸關(guān)系為[6]

(1)
式中:Qi,Qe為內(nèi)、外圈滾道接觸載荷;δi,δe為內(nèi)、外圈滾道的接觸變形;K1,K2為滾子與內(nèi)、外圈接觸剛度系數(shù)。K1,K2計(jì)算式為[6]
(2)
(3)
式中:Ei,Er,Ee為內(nèi)圈、滾子、外圈的彈性模量;μi,μr,μe為內(nèi)圈、滾子、外圈的泊松比;Di,Dw,De為內(nèi)圈滾道直徑、滾子直徑、外圈滾道直徑;l為滾子的有效接觸長度。
剛度是指產(chǎn)生單位變形量所需的外載荷,對于滾子與滾道之間的接觸剛度,可定義為產(chǎn)生單位彈性趨近量所需的接觸載荷。由于接觸作用是非線性的,根據(jù)(1)式接觸載荷與變形量的關(guān)系,接觸載荷對彈性趨近量求導(dǎo),則得到滾子與內(nèi)、外圈滾道間的接觸剛度為
(4)
(5)
式中:Ki,Ke分別為滾子與內(nèi)、外圈接觸等效彈簧剛度。無載情況下彈簧長度為滾子的實(shí)際半徑。接觸剛度公式體現(xiàn)了接觸載荷與變形量之間的關(guān)系,接觸剛度與接觸載荷有關(guān),呈非線性變化關(guān)系。
2 等效模型的建立
2.1 零件幾何誤差
軸承零件幾何誤差具有不確定性,與制造精度有關(guān)。將滾子直徑尺寸誤差用離散的誤差值表示,各滾子具有獨(dú)立的直徑尺寸誤差。滾道形狀誤差用函數(shù)表示,函數(shù)表示輪廓上各點(diǎn)相對標(biāo)準(zhǔn)圓的偏差值。滾道幾何形狀誤差有以下特點(diǎn):
(1)滾道幾何形狀誤差具有徑向性,反映不同角度的半徑變化;
(2)滾道幾何形狀誤差相對于滾道半徑很小,滾道基本保持為圓形;
(3)滾道實(shí)際輪廓為具有一定周期的閉合曲線,各點(diǎn)徑向偏差不同。
滾道實(shí)際輪廓可用Fourier級數(shù)表示為
(6)
αk=arctan(ak/bk),
式中:θ為滾道位置角;R(θ)為θ處的半徑值;D為滾道標(biāo)準(zhǔn)圓直徑;ak,bk為滾道實(shí)際輪廓Fourier級數(shù)展開的第k階諧波分量的余弦項(xiàng)系數(shù)、正弦項(xiàng)系數(shù);ck為滾道幾何形狀誤差幅值;k為滾道幾何形狀誤差階次;αk為滾道誤差函數(shù)初始相位;Ri,Re為內(nèi)、外圈滾道實(shí)際輪廓半徑。由(6)式可知滾道實(shí)際輪廓是由標(biāo)準(zhǔn)圓與若干個(gè)按不同周期變化的正弦波疊加形成。
2.2 坐標(biāo)系的建立
模型需建立2個(gè)坐標(biāo)系,坐標(biāo)系1是以外圈滾道幾何中心為原點(diǎn)的固定坐標(biāo)系;坐標(biāo)系2是以內(nèi)圈滾道幾何中心為原點(diǎn)的運(yùn)動(dòng)坐標(biāo)系,如圖1所示。
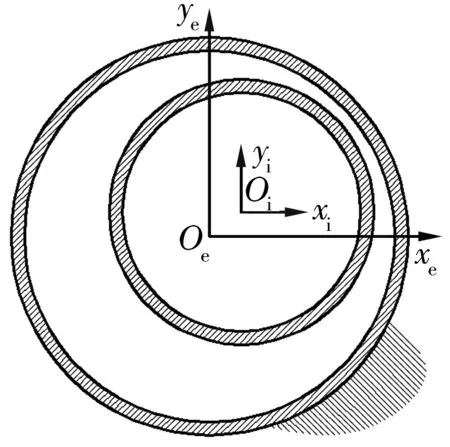
圖1 模型坐標(biāo)系
Oe-xeye為固定坐標(biāo)系,Oi-xiyi為運(yùn)動(dòng)坐標(biāo)系,軸承在無載荷作用時(shí),坐標(biāo)原點(diǎn)Oe與Oi重合。固定坐標(biāo)系保持靜止,運(yùn)動(dòng)坐標(biāo)系相對于固定坐標(biāo)系可移動(dòng)。運(yùn)動(dòng)坐標(biāo)系可繞其坐標(biāo)原點(diǎn)轉(zhuǎn)動(dòng)來計(jì)算內(nèi)圈在不同相位時(shí)的軸承載荷分布情況。
模型有2種狀態(tài),第1種是初始狀態(tài),即軸承未受外載荷作用,2坐標(biāo)系原點(diǎn)重合;第2種是受載狀態(tài),即軸承受載荷作用,內(nèi)圈與受載滾子發(fā)生偏移,軸承達(dá)到力平衡。
2.3 初始狀態(tài)計(jì)算
初始狀態(tài)時(shí),內(nèi)、外圈滾道幾何中心重合,滾子與外圈滾道接觸;軸承有正游隙;引入滾道形狀誤差函數(shù)表示滾道輪廓。滾子理想直徑為Dr,其直徑尺寸誤差為Δδ(t)。固定坐標(biāo)系中,將位于xe軸上的滾子定義為1號滾動(dòng)體,其位置角為0°,滾子按逆時(shí)針方向分布,滾子位置角為θ(t),滾子與外圈滾道接觸處的滾道半徑Re[θ(t)]是滾道誤差函數(shù),如(6)式所示。根據(jù)參數(shù)計(jì)算相關(guān)坐標(biāo)。
滾子實(shí)際直徑值為
Dw(t)=Dr+Δδ(t)。
(7)
滾子中心與固定坐標(biāo)系原點(diǎn)的距離為
Rw(t)=Re[θ(t)]-0.5Dw(t)。
(8)
固定坐標(biāo)系中,滾子中心節(jié)點(diǎn)坐標(biāo)為
(9)
2.4 受載狀態(tài)計(jì)算
軸承受載時(shí),內(nèi)圈與受載滾子偏移,承載區(qū)等效彈簧發(fā)生變形,總的彈簧力與外載荷平衡。以內(nèi)圈與受載滾子為研究對象,計(jì)算內(nèi)圈與受載滾子的偏移量。固定坐標(biāo)系中,內(nèi)圈沿x,y方向偏移量為u,v。首先在滾子未偏移時(shí),判斷滾子與內(nèi)圈是否接觸。運(yùn)動(dòng)坐標(biāo)系中,滾子中心的坐標(biāo)分別為
(10)
滾子位置角為
θ1(t)=arctan[Y1(t)/X1(t)],
(11)
滾子中心至Oi距離為
L1(t)=X1(t)/cosθ1(t),
(12)
滾子中心與Oi的連線與內(nèi)圈滾道交點(diǎn)處的半徑Ri[θ1(t)]是滾道誤差函數(shù),如(6)式所示。
內(nèi)圈與滾子的接觸情況可分為3種,分別為不接觸、臨界接觸和有效接觸。臨界接觸指內(nèi)圈與滾子剛好接觸但二者之間沒有力的作用;有效接觸指內(nèi)圈與滾子接觸且二者之間產(chǎn)生力的作用。
運(yùn)動(dòng)坐標(biāo)系中,滾子與內(nèi)圈滾道臨界接觸時(shí),滾子中心與Oi間的距離為
L2(t)=Ri[θ1(t)]+0.5Dw(t) 。
(13)
滾子與內(nèi)滾道有效接觸的判定條件為
L3(t)=L2(t)-L1(t) ,
(14)
若L3(t)大于零,表示滾子與內(nèi)圈滾道接觸,滾子的偏移量為ε(t)≠0;若L3(t)小于零,表示滾子與內(nèi)圈滾道不接觸,滾子的偏移量為ε(t)=0。滾子沿內(nèi)圈滾道半徑方向偏移,如圖2所示。
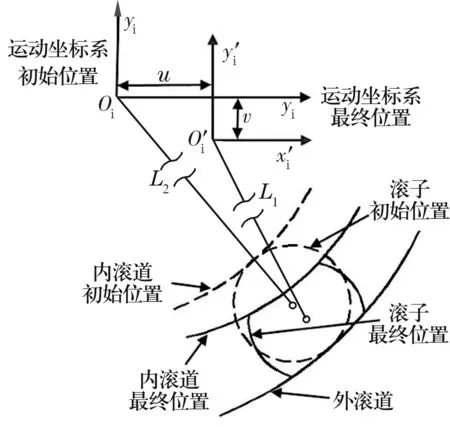
圖2 滾子接觸變形
滾子中心(彈簧中心)偏移量通過彈簧與內(nèi)、外圈間的接觸力計(jì)算確定
(15)
式中:δ為滾子總變形量,即2根彈簧總變形量L3;ε為滾子中心的偏移量。
滾子偏移后,運(yùn)動(dòng)坐標(biāo)系中,滾子中心至Oi距離為
L4(t)=L1(t)+ε(t) 。
(16)
彈簧Ki的變形量為
δi(t)=L2(t)-L4(t)=
(17)
從(17)式可看出,彈簧變形是關(guān)于零件誤差Δδ,Ri和Re的函數(shù),可見零件幾何誤差影響滾子與滾道間的接觸變形。
軸承內(nèi)圈的平衡方程為
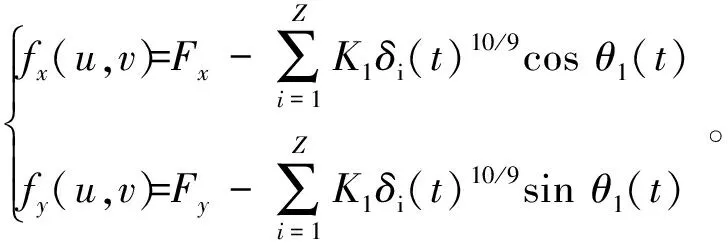
(18)
3 等效模型的求解與分析
3.1 求解方法
(18)式為內(nèi)圈平衡方程組,其求解可得內(nèi)圈的偏移量u和v,進(jìn)而可計(jì)算得到軸承內(nèi)部各滾子承受的載荷。
內(nèi)圈平衡方程為

(19)
方程未知量為內(nèi)圈沿x,y方向偏移量
δ=(u,v)T。
(20)
平衡方程分別對未知量求偏導(dǎo),得到平衡方程組的雅克比矩陣J
(21)
利用Newton-Raphson法進(jìn)行迭代
δ(k+1)=δ(k)-J(x(k))-1f(x(k)),
(22)
當(dāng)計(jì)算精度滿足計(jì)算要求后,即為平衡方程的數(shù)值解。通過內(nèi)圈偏移量計(jì)算各個(gè)滾子與內(nèi)圈的接觸變形及接觸載荷。
3.2 不考慮零件誤差時(shí)軸承載荷分布計(jì)算
不考慮軸承零件幾何誤差(情況1),計(jì)算軸承內(nèi)部載荷分布情況。采用文獻(xiàn)[2]中的算例,軸承結(jié)構(gòu)參數(shù)、材料屬性及載荷見表1。
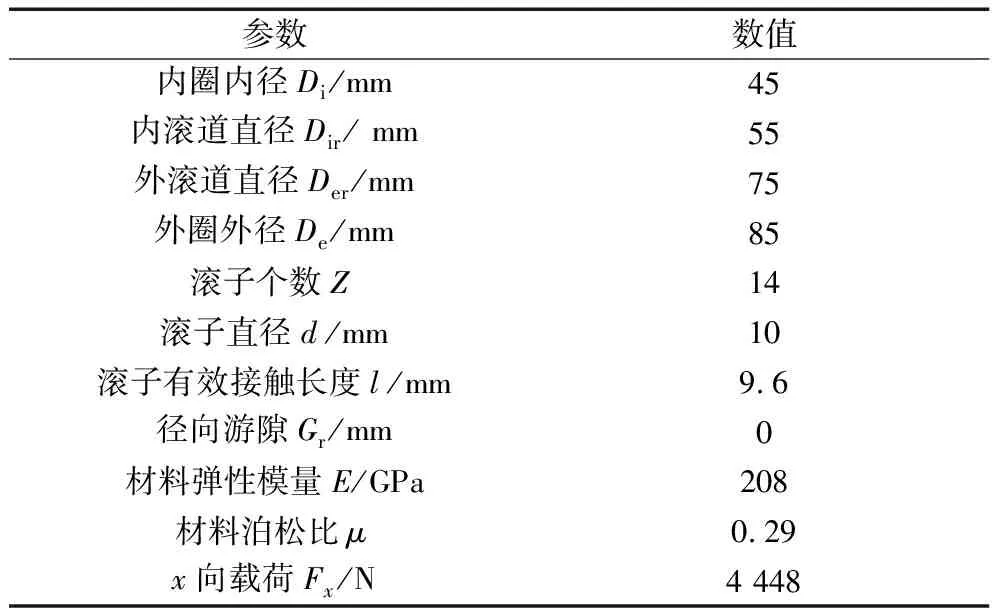
表1 軸承結(jié)構(gòu)參數(shù)及材料屬性
根據(jù)所建立的力學(xué)等效模型,采用3.1節(jié)的求解方法,計(jì)算軸承載荷分布情況,提取各位置角處的滾子接觸載荷,并與文獻(xiàn)[2]中的計(jì)算結(jié)果對比(表2)。
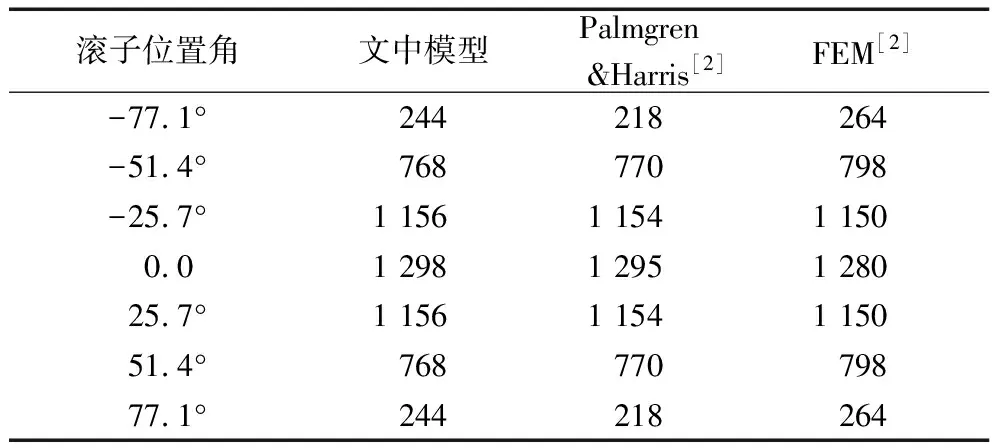
表2 不考慮零件誤差的載荷分布計(jì)算結(jié)果 N
從表2可以看出,文中力學(xué)模型的計(jì)算結(jié)果與Harris模型計(jì)算結(jié)果吻合度高;與有限元計(jì)算結(jié)果基本吻合。有限元模型考慮了結(jié)構(gòu)剛度的影響,受載滾子接觸載荷差異為7.58%,3.76%,0.52%和1.41%。有限元計(jì)算需建立三維模型、劃分網(wǎng)格、施加邊界條件,而所建立的模型避免了有限元的大計(jì)算量,能夠準(zhǔn)確地計(jì)算各個(gè)滾子的接觸載荷,將零件幾何誤差引入到力學(xué)模型中,分析誤差對載荷分布的影響。
3.3 考慮零件誤差時(shí)軸承載荷分布計(jì)算
分析零件幾何誤差對載荷分布的影響規(guī)律具有重要意義。以表1軸承為例,將零件幾何誤差引入模型中。分別考慮滾子直徑尺寸誤差(情況2)、內(nèi)滾道形狀誤差(情況3)、外滾道形狀誤差(情況4)以及綜合誤差(情況5)。內(nèi)、外滾道的初始相位均為0°。另外,為從理論上說明極端情況下誤差對載荷分布的影響,誤差值取大于實(shí)際軸承的誤差值。
滾子直徑尺寸誤差見表3,表中數(shù)據(jù)表示14個(gè)滾子的直徑尺寸誤差值,滾子從0°按逆時(shí)針方向均布。考慮單一滾子與多個(gè)滾子直徑誤差是按照一定規(guī)律排列的,前4組為單一滾子直徑誤差,表示誤差滾子的實(shí)際尺寸逐漸增加;后4組為多個(gè)滾子直徑誤差,表示誤差滾子實(shí)際尺寸從0°向兩側(cè)逐漸增加或逐漸減小,能夠反映滾子不同排列順序?qū)d荷分布的影響。計(jì)算結(jié)果如圖3所示,載荷分布是關(guān)于0°對稱的。
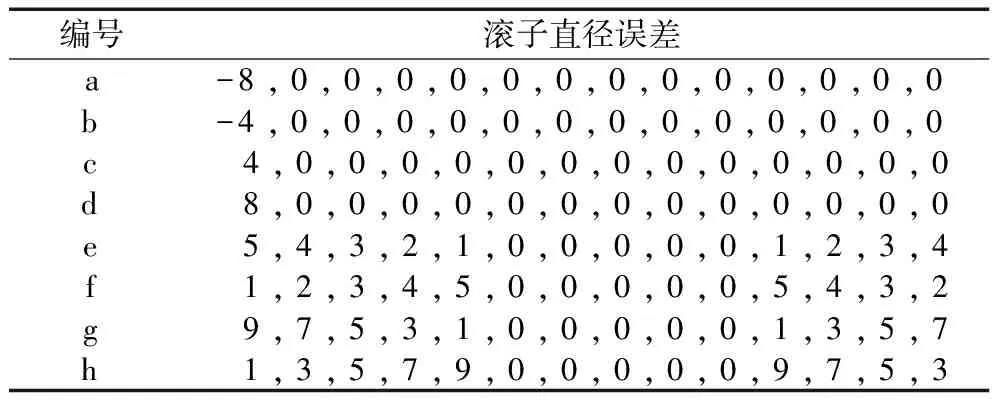
表3 滾子直徑幾何尺寸誤差 μm
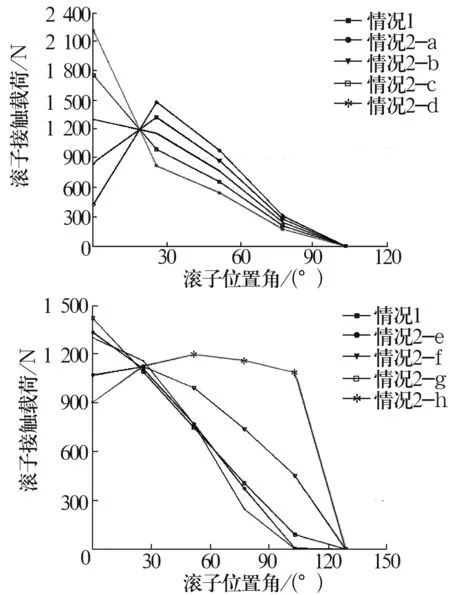
圖3 考慮滾子直徑尺寸誤差的載荷分布
從單一滾子存在誤差的計(jì)算結(jié)果可看出,當(dāng)滾子直徑誤差為正時(shí),且該滾子位于0°處,則其載荷將變大,并隨著誤差的增大滾子載荷增加,其他滾子載荷減小;當(dāng)滾子直徑誤差為負(fù)時(shí),且該滾子位于0°處,其載荷減小,并隨著誤差的增大載荷降低,其他滾子載荷增加。當(dāng)單一誤差滾子位于0°處時(shí),滾子直徑誤差對誤差滾子載荷影響較大,但承載滾子數(shù)目不變。當(dāng)誤差滾子未處于承載區(qū)域時(shí),其載荷分布與不考慮零件誤差時(shí)的載荷分布情況一致。
從多個(gè)滾子存在誤差的計(jì)算結(jié)果可看出,情況2-h的分布順序,即誤差由0°向兩側(cè)逐漸增大,0°處滾子載荷減小,承載滾子數(shù)目增加;情況2-e的分布,即誤差由0°向兩側(cè)逐漸減小,0°處滾子載荷增大。可見,滾子排列順序影響0°處滾子的載荷,并會(huì)改變承載滾子數(shù)目。
內(nèi)滾道形狀誤差見表4。前4組反映內(nèi)滾道形狀一定,形狀誤差幅值發(fā)生改變;后4組反映內(nèi)圈形狀誤差幅值一定,形狀改變,即階次改變。計(jì)算結(jié)果如圖4所示。
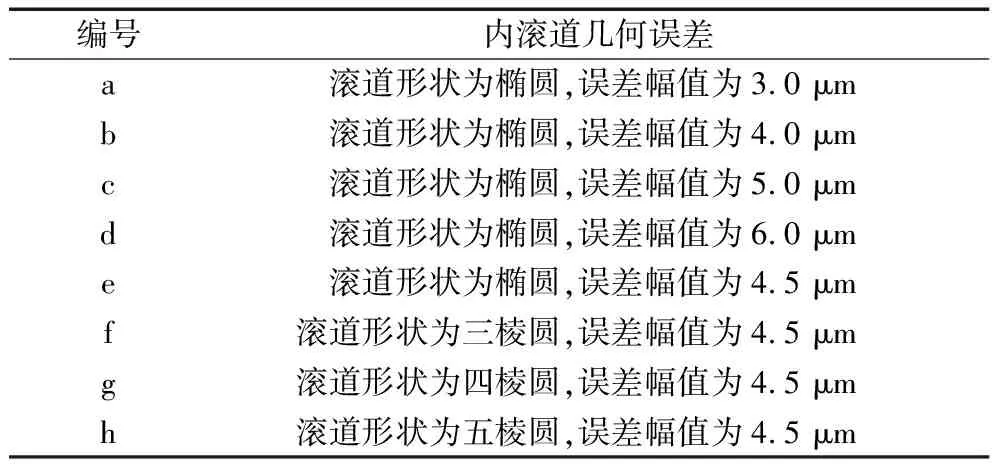
表4 內(nèi)滾道幾何形狀誤差
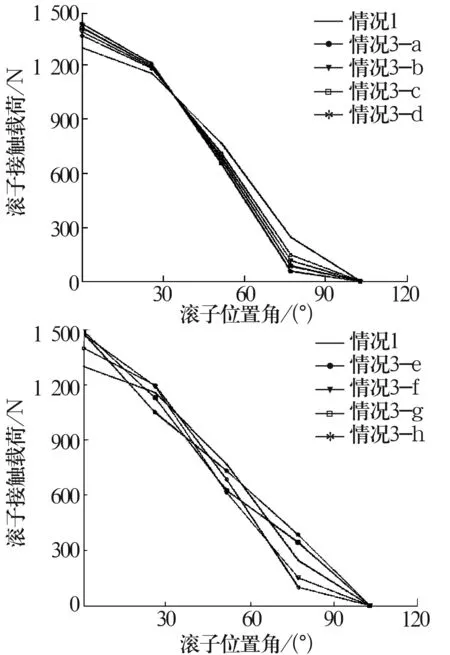
圖4 考慮內(nèi)滾道幾何形狀誤差的載荷分布
從計(jì)算結(jié)果可看出,改變形狀誤差幅值時(shí),0°處滾子載荷增加120 N左右,不同誤差值所引起滾子載荷的變化不明顯。改變形狀階次時(shí),0°處滾子載荷增加200 N左右,引起滾子載荷的變化較明顯。
外滾道形狀誤差見表5。前4組外滾道形狀一定,形狀誤差幅值改變;后4組內(nèi)圈形狀誤差幅值一定,形狀改變,即階次改變。計(jì)算結(jié)果如圖5所示。
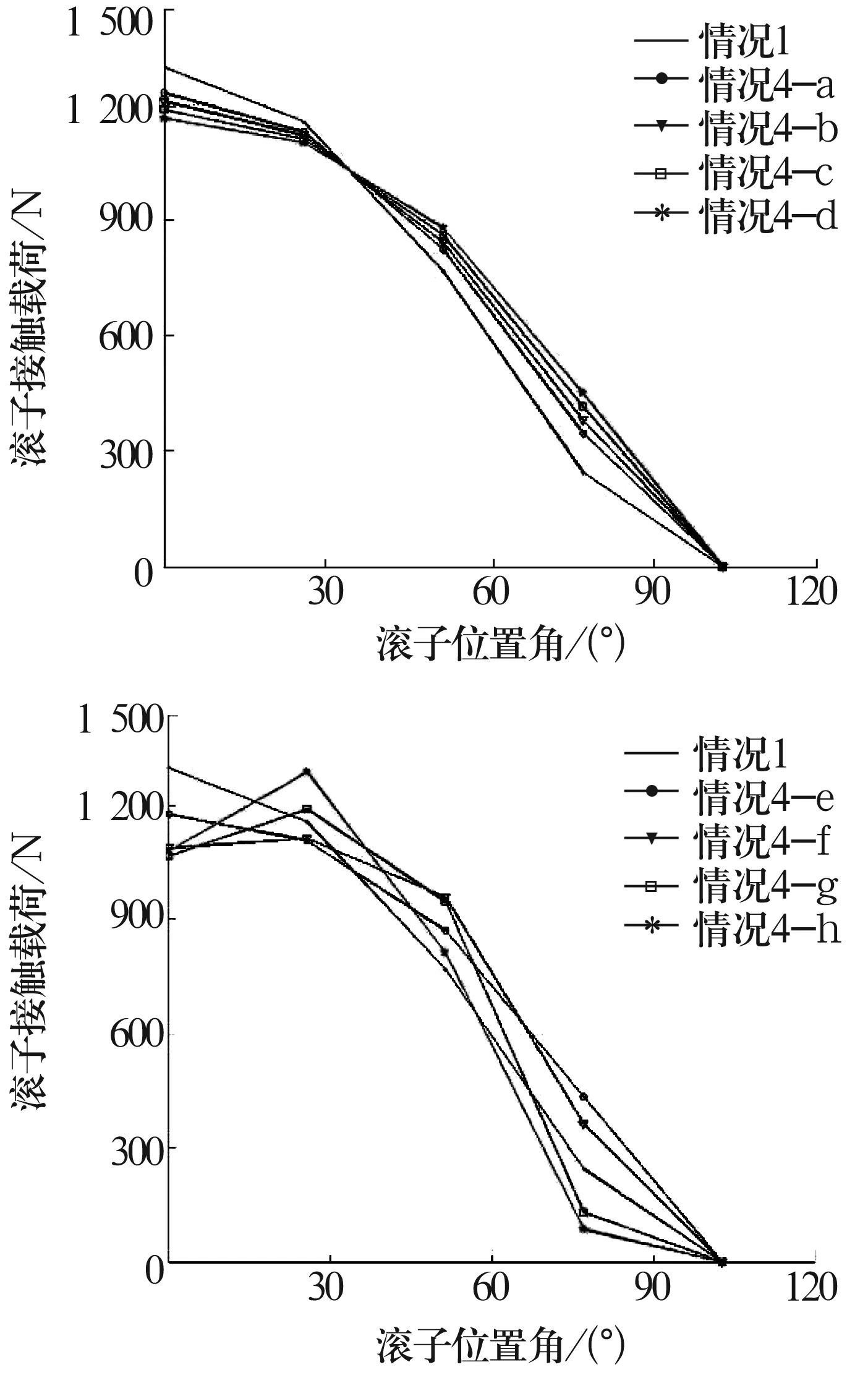
圖5 考慮外滾道幾何形狀誤差的載荷分布
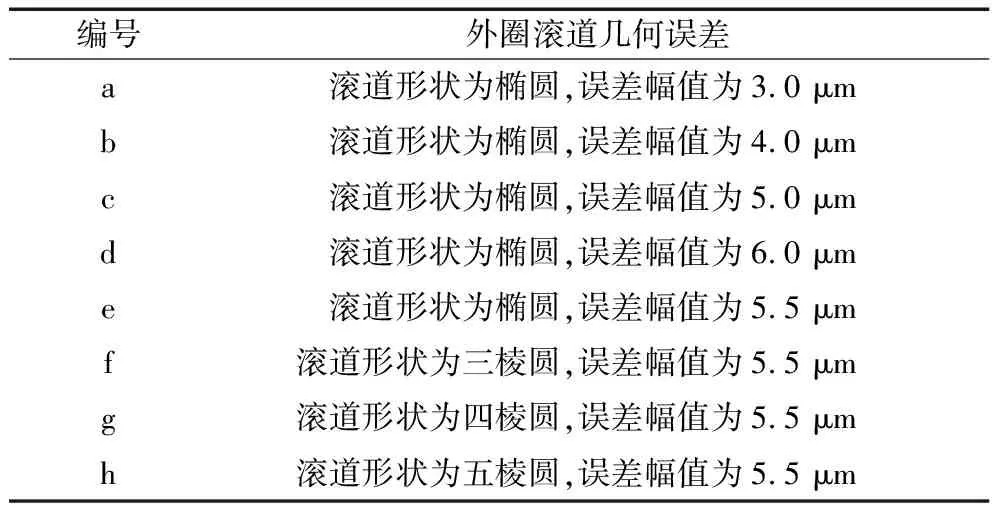
表5 外滾道幾何形狀誤差
從結(jié)果可看出,改變形狀誤差幅值時(shí),0°處滾子載荷減小80 N左右,不同誤差值所引起滾子載荷的變化不明顯。改變形狀階次時(shí),載荷分布變化明顯,隨著形狀階次的增加,0°處滾子載荷逐漸減小,有改變承載滾子數(shù)目的趨勢。
為更加真實(shí)地分析幾何誤差與載荷分布的關(guān)系,研究多個(gè)零件幾何誤差對載荷分布的影響。零件誤差見表6。計(jì)算結(jié)果如圖6所示。
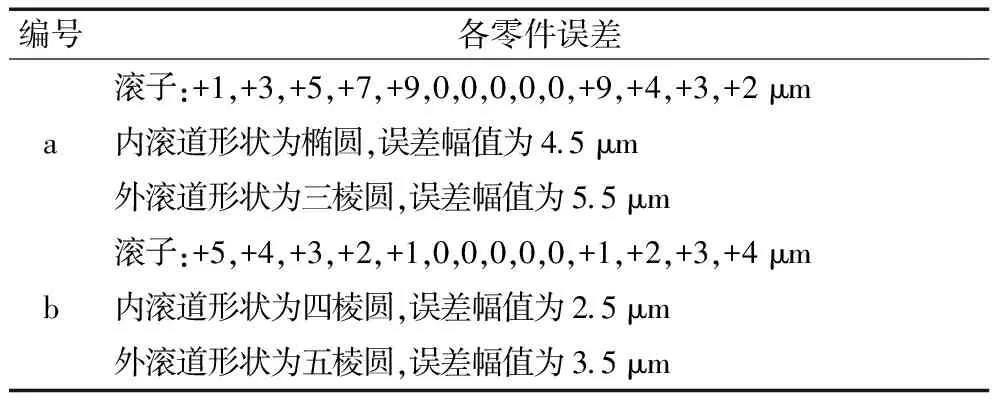
表6 多個(gè)零件幾何誤差
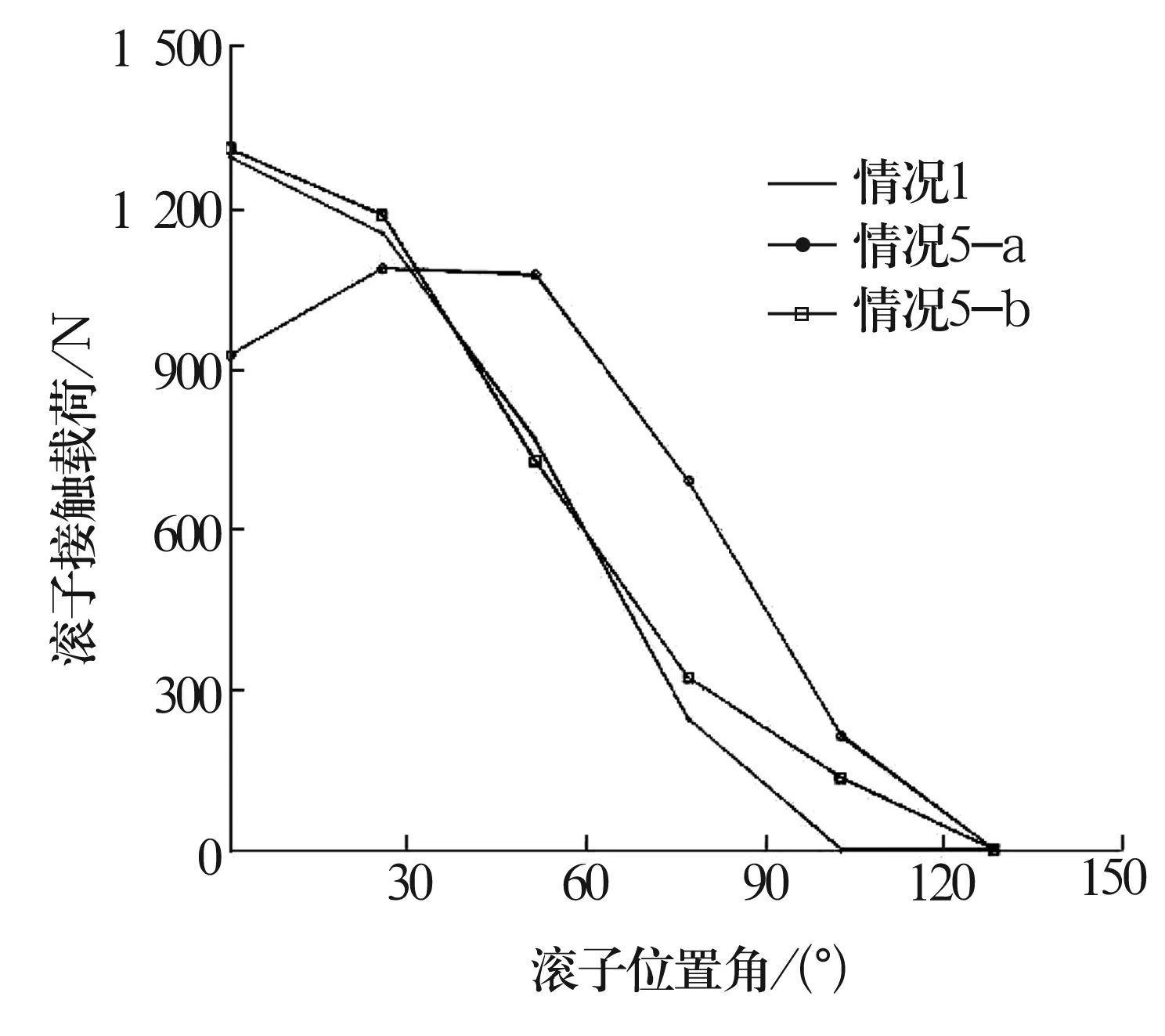
圖6 考慮多個(gè)零件幾何誤差的載荷分布
從計(jì)算結(jié)果可看出,不同誤差組合對載荷分布的影響各異。情況5-a誤差組合能夠優(yōu)化載荷分布,減小0°處滾子載荷,增加承載滾子數(shù)目,避免內(nèi)部載荷沖擊。情況5-b誤差組合對載荷分布影響較小,0°處滾子載荷幾乎沒有變化,但承載滾子數(shù)目增加。
分析單一誤差對軸承載荷分布的影響,計(jì)算0°處滾子載荷變化規(guī)律,如圖7所示。不考慮誤差時(shí),0°處滾子載荷為1 298.4 N。滾子載荷對單一滾子誤差敏感,變化幅度大,多個(gè)滾子誤差的影響與誤差排列有關(guān);內(nèi)滾道形狀誤差使?jié)L子載荷增大;外滾道形狀誤差使?jié)L子載荷下降,但幅度不大。與形狀誤差幅值的影響相比,形狀誤差階次對峰值載荷的影響更大。零件誤差對載荷分布的影響,與誤差類型、大小及誤差組合有關(guān)。
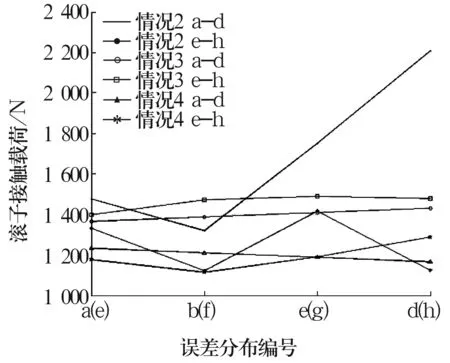
圖7 峰值載荷變化曲線
4 結(jié)論
(1)單一滾子直徑誤差為正時(shí),隨著誤差增大,峰值載荷增加;滾子直徑誤差為負(fù)時(shí),隨誤差增大,載荷分布出現(xiàn)波谷,承載滾子數(shù)目增加,誤差增加到一定程度,滾子將不承受載荷,即出現(xiàn)“搭橋”現(xiàn)象。
(2)多個(gè)滾子存在誤差時(shí),滾子由中間位置向兩邊逐漸變大時(shí),承載滾子數(shù)目增加,峰值載荷減小;滾子由中間位置向兩邊逐漸減小時(shí),承載滾子數(shù)減少,峰值載荷增加。
(3)內(nèi)滾道存在形狀誤差時(shí),隨著誤差幅值的增大,峰值載荷增加,但增加幅度很小,承載滾子數(shù)幾乎不改變;隨著誤差階次的增加,峰值載荷增加,并有改變承載滾子數(shù)目的趨勢。誤差階次的影響大于誤差幅值。
(4)外滾道存在形狀誤差時(shí),隨誤差幅值的增加,峰值載荷小幅減小,承載滾子數(shù)目變化不明顯;隨著誤差階次的增加,峰值載荷減小,改變承載滾子數(shù)目的趨勢明顯。
(5)各零件誤差通過一定的組合,可優(yōu)化載荷分布,降低峰值載荷、增加承載滾子數(shù)目。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
