一種改進型陸標定位系統的研制
2014-07-31 20:20:48張長輝王雪晴
艦船科學技術 2014年7期
關鍵詞:系統
張長輝,趙 柯,王雪晴
(鎮江船艇學院,江蘇 鎮江 212003)
一種改進型陸標定位系統的研制
張長輝,趙 柯,王雪晴
(鎮江船艇學院,江蘇 鎮江 212003)
傳統的陸標定位,采用人工觀測、手工繪算的方式,在紙制海圖上標繪船位點。這樣定位速度緩慢,精度不高,所得出的船位信息無法自動輸入到ARPA雷達等現代導航設備中去進行輔助運算。本文提出將現有的陸標定位進行數字化改造,利用現代傳感器與艦載電子海圖技術相結合,研制出一種改進型的陸標定位系統,該系統的實現可以有效地解決船艇在復雜電磁環境下的導航定位問題。
復雜電磁環境;導航系統;陸標定位
0 引 言
未來的信息化戰爭將是“陸、海、空、天、電”五維一體的立體化戰場,數量龐大、體制復雜、種類多樣、功率大的電子信息裝備的大量使用,使得戰場空間中的電磁信號非常密集,形成極為復雜的電磁環境[1]。在這樣環境下,船艇現有的主要導航定位裝備,除了不依賴于電磁波工作的磁羅經和電羅經之外,其他幾種主要裝備由于受其本身工作原理的限制,均會受到不同程度的影響[2]。而磁羅經和電羅經主要用于陸標定位,它的定位原理是與電磁環境無關的平面幾何原理,所以利用傳統的陸標定位進行復雜電磁環境下的船艇導航定位,具有先天上的優越性[3]。但是由于以往技術條件上的限制,上述定位手段大都采用人工觀測、手工繪算的方式,在紙制海圖上標繪船位點,所以定位速度緩慢,精度不高,所得出的船位信息無法自動輸入到ARPA雷達等現代導航設備中去進行輔助運算。因此,本文提出將現有的陸標定位進行數字化改造,利用現代傳感器與艦載電子海圖技術相結合,研制一種改進型的陸標定位系統。
1 系統總體設計
由陸標定位原理可知:陸標定位主要是通過測定2個或3個所觀測物標的磁方位、物標之間的夾角以及物標高度等要素,進行簡單繪算后確定船位。因此,本系統在設計上由繪算部分與觀測部分組成[4]。其中觀測部分包括伺服平臺、圖像傳感設備、測角系統等;繪算部分包括數據處理中心以及電子海圖上層軟件。其整體結構如圖1所示。
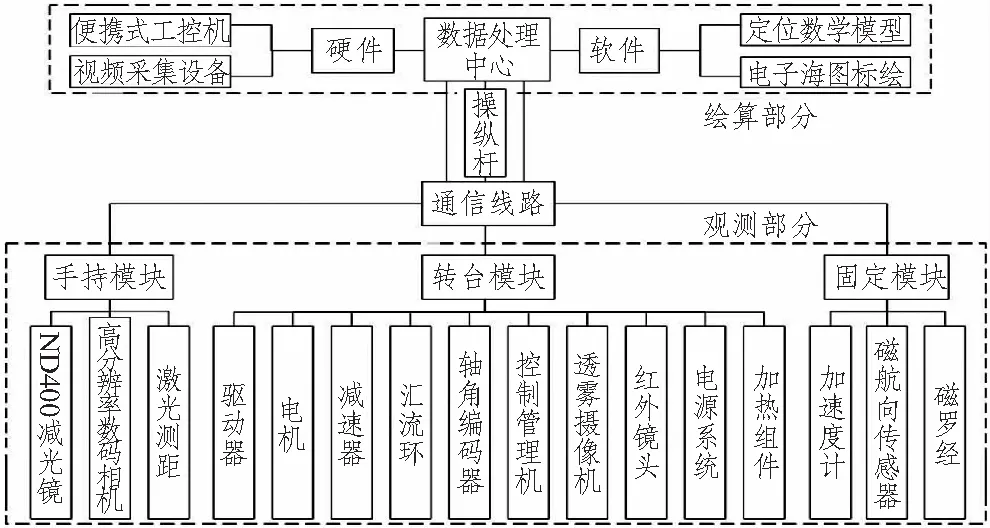
圖1 系統組成框圖Fig.1 The system composition block diagram
圖1中,觀測部分主要由手持模塊、轉臺模塊和固定模塊組成,其中轉臺模塊是設計安裝在指揮臺上四周空曠的位置,其主要作用是通過船用伺服轉臺,結合由透霧攝像機和紅外鏡頭組合而成的視頻系統,在駕駛室內遙控實現對船艇周圍海況N×360°任意方位快速觀察的同時,完成當前視野圖像的實時傳輸與采集,并對視野中的任意目標相對船首方向的舷角大小進行自動化高精度測量,為船艇進行快速定位提供關鍵信息,這次本系統的核心部分。手持模塊是根據設備本身對工作環境穩定性的依賴性,相對船載轉臺完全獨立設計的一個部分,可以在指揮臺或者駕駛室內由用戶手持使用。該部分的主要在用戶手持的相對穩定條件下,對5 n mile(約10 km)范圍內的陸標進行激光測距。固定模塊是相對船艇本身固定而言,該部分主要包括磁航向傳感器(配合船載磁羅經使用)和安裝在船艇首尾和正橫方向上的1組加速度計,分別用來傳感船艇羅航向和船艇水平加速度,以供推算船位使用[5]。
繪算部分安裝在駕駛室內,主要包括便攜式軍用工控機、操縱桿、視頻采集設備和電子海圖等軟件系統。該部分的作用是控制伺服轉臺的運動、獲取前端部分各種傳感器的回傳信息、對所有信息進行綜合運算處理、根據數學模型計算出船艇位置并在電子海圖上自動標繪。
2 關鍵部分的技術實現
由系統總體設計可知,本系統中的關鍵部分是轉臺模塊。
2.1 轉臺模塊的總體設計
轉臺模塊由方位座和俯仰包兩部分組成,包括方位軸系、俯仰軸系、驅動器、編碼器、軸承、匯流環、限位裝置、電子線路以及密封環節等。系統的總體結構如圖2所示。
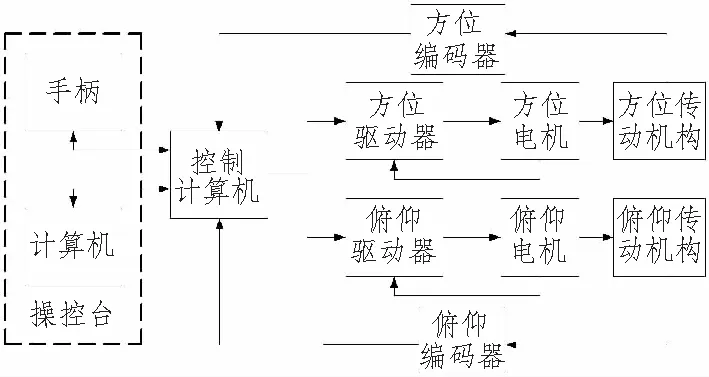
圖2 轉臺模塊設計圖Fig.2 The design of turntable module
平臺的方位和俯仰傳動機構由支座,滾珠軸承,空心軸等組成,在其上安裝有電機轉子和角度測量單元,在俯仰傳動軸上固定有支架,用于安裝透霧攝像機和紅外鏡頭等組件。通過支架調整裝置進行調整以達到傳感器光軸與俯仰軸垂直。球型頭由方位軸支撐,其俯仰方向的旋轉由俯仰伺服傳動電機驅動。方位軸中嵌有小型匯流環。匯流環保證經過方位機械傳動實現內外部電氣(電源、操控、狀態、視頻)信息的互連。方位、俯仰軸系通過密封環節嚴密水密,球形本身嚴格氣密,以保證內部各元器件的正常工作。
2.2 轉臺模塊的控制原理
系統接收來自操控臺的手柄或計算機的控制指令控制轉臺運動,采用測速編碼器反饋構成速度閉環,接收控制計算機經D/A變換輸出的模擬控制電壓,進行速度調節,方位編碼器和俯仰編碼器實時傳遞方位角度信息和俯仰角度信息給控制計算機,控制計算機通過串口上報轉臺角度信息給操控臺上位機。另外在俯仰的極限位置裝有電器止檔和機械止檔,控制計算機的程序中還設有軟件限位功能,伺服轉臺控制系統原理如圖3所示。
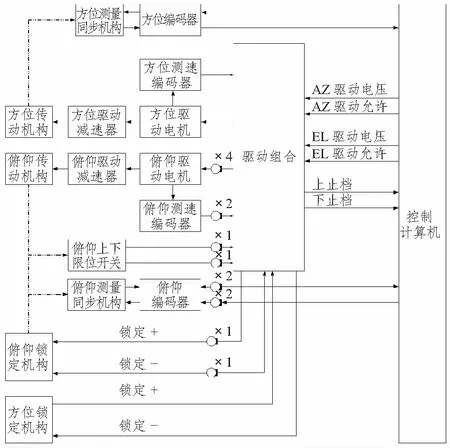
圖3 伺服轉臺控制系統原理Fig.3 The control systems of servo turntable
2.3 控制計算機
控制計算機是轉臺模塊控制的中心,它的功能主要包括2個方面:一是根據不同的指令進行相應的操作控制,它包括開啟與閉合系統,調節傳感器,控制方位、俯仰旋轉等;二是能完成平臺內部的數據處理功能,如伺服系統控制、D/A及A/D變換。
伺服轉臺通過地址邏輯譯碼電路分別選通,采用FPGA進行邏輯控制與DSP進行總線擴展接口,實現外部的復雜邏輯控制。控制計算機的硬件結構如圖4所示。
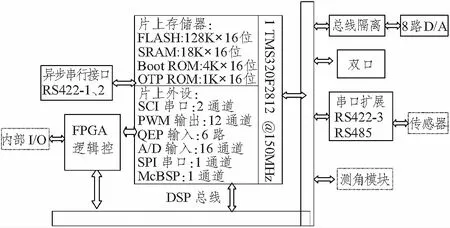
圖4 控制計算機的硬件結構圖Fig.4 The hardware structure of control computer
2.4 測角單元
測角線路的功能是測量傳感器圖像所處的艦船坐標系的高度和方位角。為伺服系統提供角位置反饋信息,形成位置閉環。
測角單元包括俯仰測角和方位測角,二路測角原理和組成相同,包括角度傳感器(光電-絕對值式軸角編碼器),信號激磁電路,粗/精RDC轉換電路,粗/精組合糾錯電路,時序發生電路,數據輸出緩沖電路等組成。其原理如圖5所示,旋轉變壓器正余弦信號,經RDC電路轉換成數字量形式,經組合編碼后,得出艦船坐標系的高低角和方位角。
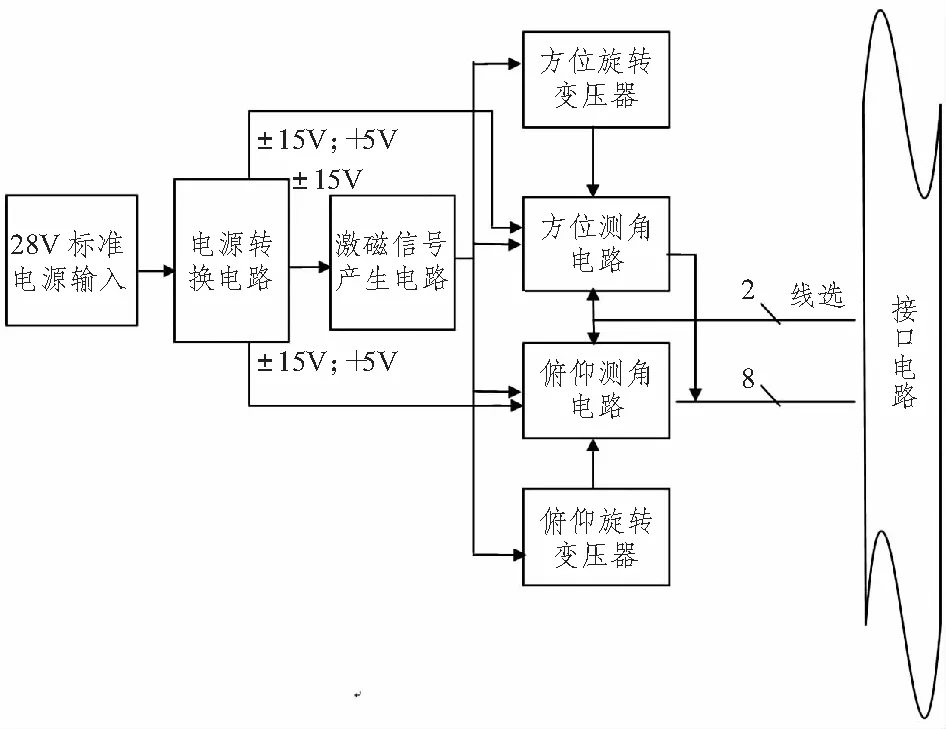
圖5 測角單元原理框圖Fig.5 The principle of angle measurement
2.5 操控單元方案
操控單元由操縱桿、鍵盤和數據處理電路組成。操縱桿上的壓力傳感器和電壓轉換電路,提供驅動穩定平臺方位和俯仰運動的電壓偏差量信息;通過兩路A/D轉換器轉換為數字量由單片機讀入,通過異步串行接口發送給控制管理模塊。鍵盤主要用于控制系統的狀態,鍵盤命令也通過串行接口發送給控制管理模塊。當壓力傳感器左右壓動時,電壓值通過運算放大器放大后,送給模/數轉換器進行模數轉換,轉換后的數字量經單片機處理,通過RS232或者RS422串行口以規定的報文格式輸出。
3 基本原理
本系統中在獲取物標之間的水平角時,采用了一次成像法。所謂一次成像法就是針對小于70°的物標夾角,通過一次成像的方式,獲取2個物標在同一幅數碼照片里所處的位置,通過計算,得到2個物標之間的夾角。這種方法與傳統的測角法相比,能夠最大程度上消除了分步測量所帶來的動態誤差,并且只需要2個待測物標同時出現在成像范圍之內即可,對瞄準的準確度要求不高,卻能保證較好的測量精度。
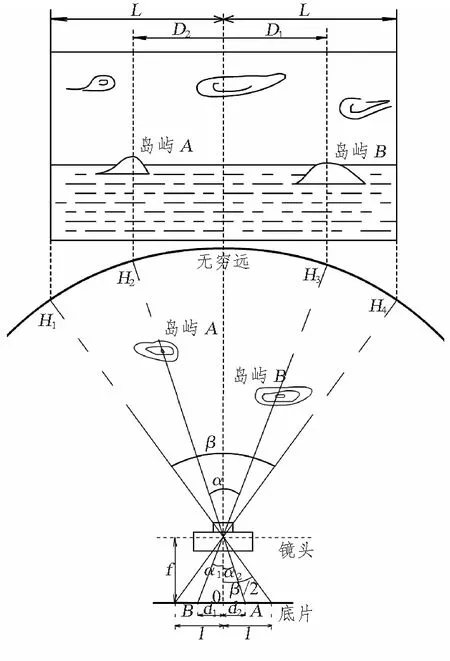
圖6 一次成像法角度測量原理圖Fig.6 The principle of angle measurement with once imaing
可通過圖6說明一次成像法的理論推導。利用相機對物標A、物標B進行一次成像,則圖中物標A、物標B在鏡頭后面底片上的成像點分別為A點和B點,假定這兩點與底片中心線之間的橫向距離分別為d2和d1,底片中心線到底片橫向外沿的距離為l,那么根據圖示不難得出:

也即:


式中,L為數碼相片橫向象素點數量;D1和D2為相片中物標點偏離相片中心線的象素點數量。β角可以預先測量得到。所以,要測量物標A、物標B相對于攝像機鏡頭的夾角大小,只需要在事先測得β角的前提下,從數碼相片上量出物標A、物標B的像偏離相片中心線的象素點值,即可根據上述公式計算出角α。
4 系統誤差分析[6]
該系統所采用陸標定位方法主要有兩標方位定位、三標方位定位、三標兩角定位、兩標距離定位等。在以上諸定位方法中,應用到的船位線主要有方位船位線、距離船位線、水平角船位線。
只要知道觀測值均方差,根據物標與船位之間的距離或兩物標間的距離,即可得到船位線的均方差。

兩標方位船位的均方誤差圓半徑為:
三標兩角船位的均方誤差圓半徑為:
式中:mα為觀測水平角均方差,(′);θ為兩船位線夾角;DA、DB、DC分別為觀測船位到左、中、右標的距離,n mile;DAB和DBC分別為左標與中標、中標與右標之間的距離,n mile。
兩標距離船位均方誤差圓半徑為:
三標定位,由3條船位線確定最概率船位,其均方差為:

式中:Ei,i∈[1,3]為各船位線的均方差;θij,i,j∈[1,3],i≠j。
三標方位定位時,則E1=m1D1,E2=m2D2,E3=m3D3。若m1=m2=m3,三標方位定位的最概率船位的均方差為:

三標距離定位時,最概率船位的均方差為:

式中:mD1,mD2,mD3分別為觀測三標距離時的均方差。若mD1=mD2=mD3,則
本系統中所采用的測量儀器有磁羅經(磁航向傳感器)、電子六分儀和激光測距儀。其中,本導航系統中激光測距儀的測中范圍為5 n mile,測距精度約為1 m;電子六分儀的測角誤差為1″,測水平角的誤差為3″,磁航向傳感器的精度為6分(0°.1),電子海圖屏幕像素為60×60/1024=3′。
本系統測方位時考慮到磁航向傳感器的精度,均方差約為±0°.5,羅經差的均方差約為±0°.6,在海圖上標繪方位線受屏幕像素影響時均方差為±0°.1,上述各項均為相互獨立的誤差,故其綜合的均方差為

測水平角時,考慮測角誤差為0′.6,海圖上標繪誤差為3′.0,六分儀器差約為1′.0,得到水平角船位線的均方差為


4.1 兩標方位定位船位均方誤差圓半徑
選取系統的最大作用距離(5 n mile)處的物標,設測得的兩物標的船位線均方差均為0°.79,并設兩方位船位線的夾角為選標要求最不利的角度(30°),則該系統兩方位定位時的最大船位誤差圓半徑為
0.195 n mile=360.6 m。
當物標距離愈近,船位線夾角越接近90°,M值越小。
4.2 三標方位定位船位均方誤差圓半徑
選取系統的最大作用距離(5 n mile)處的物標,設測得的兩物標的船位線均方差均為0°.79,經過分析,當兩方位線夾角θ12=160°,θ12=30°,θ13=170°,距離D1=D2=D2=5′.0時,三標方位定位船位均方誤差圓半徑達到最大值,為M=0.2 n mile。
4.3 水平角定位(三標兩角定位)船位均方誤差
測角均方誤差為3′.2。從水平角定位船位均方誤差公式分析,引起船位誤差最大值為中標距離遠,中標與右標、中標與右標距離近,船位線夾角小于30°或大于150°。經分析以中標距離最遠5 n mile,中標與右標2 n mile,中標與右標距離近2 n mile,船位距左標(或右標)為5 n mile,與另一標為4 n mile,船位線夾角達最大150°時分析,代入下式,得水平角定位時最大船位誤差為0.029 n mile,約為55 m。

4.4 兩標距離定位船位均方誤差
綜上分析,該系統最大誤差在陸標定位允許范圍之內,能夠滿足航海的要求。
5 海上試驗與結果分析
為檢測本系統在海上航行環境下的工作穩定性、定位精度和定位速度。在海上進行了海試,試驗海區和計劃航線如圖7所示。
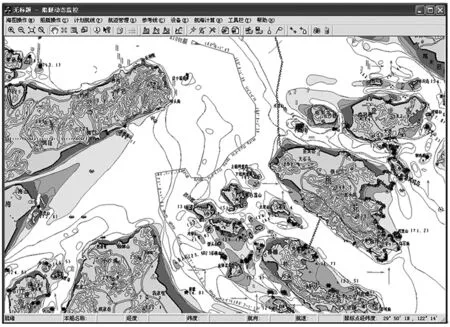
圖7 試驗航行海區及計劃航線Fig.7 The area and planned route of sea trials
通過本系統,分別采用兩標方位定位、三標方位定位、三標兩角定位、兩標距離定位,測得8個船位,同一時刻也用GPS測得船位,用GPS測得船位點和本系統所測得船位點,如表1所示。
表1 GPS所測船位和本系統所測船位比較表
Tab.1 The data of improved terrestrial fixing system and GPS receiver
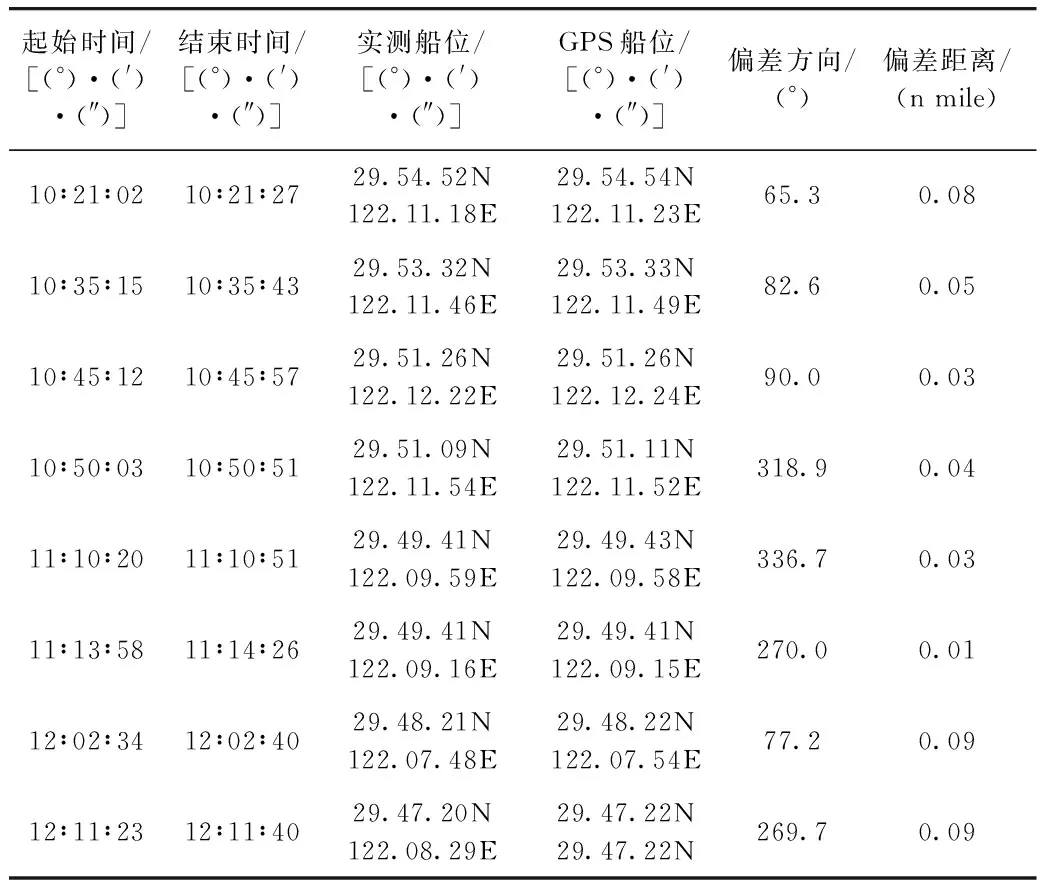
起始時間/[(°)·(')·(″)]結束時間/[(°)·(')·(″)]實測船位/[(°)·(')·(″)]GPS船位/[(°)·(')·(″)]偏差方向/(°)偏差距離/(nmile)10∶21∶0210∶21∶2729.54.52N122.11.18E29.54.54N122.11.23E65.30.0810∶35∶1510∶35∶4329.53.32N122.11.46E29.53.33N122.11.49E82.60.0510∶45∶1210∶45∶5729.51.26N122.12.22E29.51.26N122.12.24E90.00.0310∶50∶0310∶50∶5129.51.09N122.11.54E29.51.11N122.11.52E318.90.0411∶10∶2011∶10∶5129.49.41N122.09.59E29.49.43N122.09.58E336.70.0311∶13∶5811∶14∶2629.49.41N122.09.16E29.49.41N122.09.15E270.00.0112∶02∶3412∶02∶4029.48.21N122.07.48E29.48.22N122.07.54E77.20.0912∶11∶2312∶11∶4029.47.20N122.08.29E29.47.22N29.47.22N269.70.09
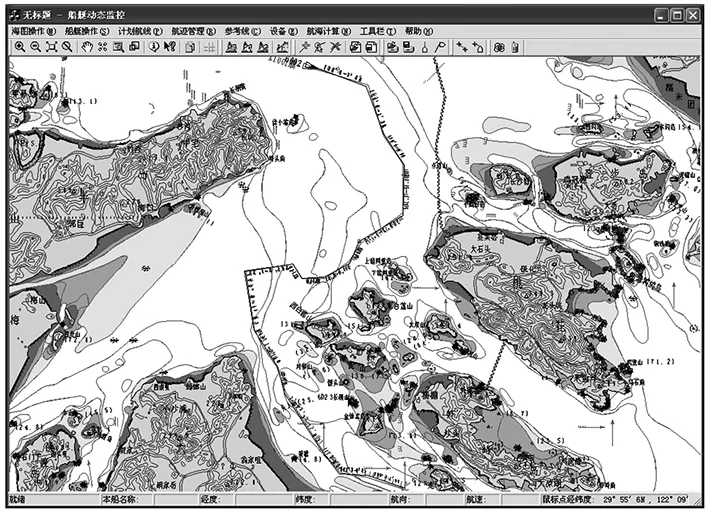
圖8 GPS船位和本系統所測船位對比Fig.8 The voyage chart with different navigation methods and GPS receiver
用GPS所測得的航跡與用本系統所測得的航跡疊加如圖8所示。通過本次實驗可得出以下結論:
1)本系統的硬件設備能夠適應船載工作環境,在整個為期一周的實驗過程中,沒有出現任何故障或異常;
2)本系統能夠快速(最快15 s,兩標距離定位)、準確(陸標定位誤差小于0.1 n mile)地進行航行中的船位測定工作。
6 結 語
針對陸標定位手工操作、定位速度慢等問題,本文提出一種基于現代傳感器與艦載電子海圖技術的新型導航定位系統的設計方案和技術實現。該系統充分利用了海上各種助航物標先天不易受干擾和破壞的條件,有效地解決復雜電磁環境下船艇的導航定位問題。通過海上實驗表明,該系統性能穩定,程序結構設計合理,定位精度滿足軍事航海上的要求。
[1] 劉軍.信息化戰場復雜電磁環境對作戰的影響[J].西安政治學院學報,2007,4(20):81-83.
LIU Jun.The impact of intricate electromagnetic conditions in informationalized war[J].Journal of Xi′an Politics Institute of PLA,2007,4(20):81-83.
[2] 劉尚合,孫國至.復雜電磁環境內涵及效應分析[J].裝備指揮技術學院學報,2008,19(1):1-5.
LIU Shang-he,SUN Guo-zhi.Analysis of the concept and effects of complex electromagnetic environment[J].Journal of the Academy of Equipment Command and Technology,2008,19(1):1-5.
[3] 智利民.航海學[M].北京:解放軍出版社,2004.
ZHI Li-min.Navigation[M]. Beijing:PLA Publishing House,2004.
[4] 趙柯.一種船舶定位裝置[P].中國專利:ZL 2012 2 0196948.5,2013-01-23.
ZHAO Ke.One ship positioning device[P].Chinese Patent:ZL 2012 2 0196948.5,2013-01-23.
[5] 關政軍,陳小鳳.磁傳感器在航海上的應用[J].大連海事大學學報,2006,32(2):45-48.
GUAN Zheng-jun,CHEN Xiao-feng.Application of magnetic sensor in the field of navigation[J].Journal of Dalian Maritime University,2006,32(2):45-48.
[6] 杭太貴.航行中陸標方位定位精度分析[J].中國水運,2012,12(12):17-18.
HANG Tai-gui.Inaccuracy analysis of terrestrial fixing during voyage[J].China Water Transport.2012,12(12):17-18.
Development of improved terrestrial fixing system
ZHANG Chang-hui,ZHAO Ke,WANG Xue-qing
(Zhenjang Watercraft College,Zhenjang 212003,China)
In traditional terrestrial fixing, people plotted the ship′s position on the paper chart through daily observation and hand painting.This causes the slow positioning speed,the low accuracy and that the ship′s position information cannot be input automatically into the ARPA radar and other modern navigation equipments to fulfill the auxiliary operations.The article suggests that the existing terrestrial fixing system should carry out digital transformation,during which modern sensors and shipboard electronic chart technology can be combined to use.Thus an improved terrestrial fixing system can be developed to effectively solve the watercraft′s navigation and positioning in a complex electromagnetic environment.
complex electromagnetic environment;navigation system;terrestrial fixing
2013-04-01;
2013-05-28
張長輝(1981-),男,碩士,講師,從事船艇航海技術研究。
U675.79
A
1672-7649(2014)07-0131-06
10.3404/j.issn.1672-7649.2014.07.028
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
