一種艦船燈光通信系統研究
2014-12-05 02:18:44胡定軍劉良順
艦船科學技術 2014年7期
胡定軍,劉 銘,劉良順
(1.鎮江船艇學院,江蘇 鎮江212003;2.中國人民解放軍94679 部隊,江蘇 南京210038)
0 引 言
燈光通信作為艦船最常見的通信方式有系統簡單、使用方便等優點,所以其盡管是一種古老的通信方式,今天仍然在艦船的通信系統中占有重要地位。但隨著技術的發展,跟其他通信方式相比,燈光通信需要專業培訓人員、信息傳遞速率太低的缺點比較明顯,和現代自動化發展趨勢相背。為此研制一套自動化燈光通信系統,其不僅具有傳統燈光通信系統簡單、使用方便等優點[1],而且無需專業人員參與,能較大幅度提高通信速率。
1 燈光通信系統結構組成
艦船燈光通信系統由燈光自動拍發子系統、燈光自動接收子系統及伺服子系統組成,如圖1所示。
燈光自動拍發子系統主要由計算機燈光發送軟件、LED 發射控制器及LED 信號燈組成。計算機負責將所要發送的信息采用莫爾斯碼進行編碼,并送入燈光信號控制器,在燈光信號控制器的作用下,信號燈按照特定的編碼進行閃爍,發射信號,實現燈光信號的自動拍發。
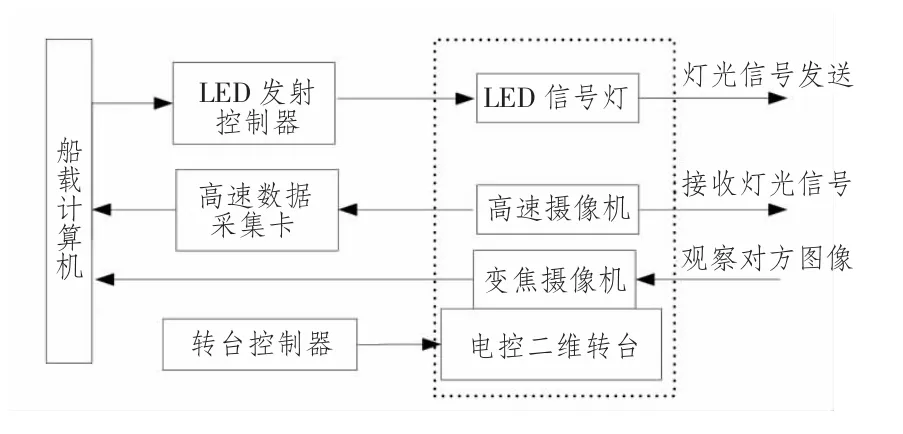
圖1 總體系統結構圖Fig.1 The structre of ship light communication system
燈光自動接收子系統主要由高速攝像機、高速圖像采集卡、燈光圖像識別及接收軟件組成。利用高靈敏、高幀頻、可開窗、帶紅外接收的CMOS 高速攝像機作為信號接收傳感器,接收圖像實時采集到計算機內,經專門圖像分析軟件識別發射信號燈方位,處理燈光脈沖強度變化,自動識別和提取光脈沖寬度和強度信息,轉換成莫爾斯碼并在顯示屏上顯示相應字母和數字,實現燈光的自動接收與識別。
伺服子系統包括變焦攝像機、圖像顯示軟件模塊、電控二維轉臺及轉臺控制器,利用變焦攝像機捕捉對準LED 光源信號,計算機內實時顯示圖像;實現實時對準對方目標,保證對方的光源始終位于高速攝像機的視野范圍。
系統設計時需將LED 光源、變焦攝像機、高速攝像機集成在電控二維轉臺,三者同軸,實現LED光源信號發射與接收及瞄準器一體運動。
1.1 LED 智能信號燈的設計
燈光通信的LED 智能信號燈是燈光自動拍發子系統的前端顯示關鍵部位,考慮到與原有燈光通信系統兼容,LED 智能信號燈既可以通過人工手動扳下扳手控制光源亮滅,也可以接收控制板電路的信號自動控制光源的亮滅。
LED 智能信號燈主要由控制模塊、電源模塊、光源模塊等單元組成。控制模塊主要是用來控制信號燈工作(光源的亮滅);光源模塊由3 組18 個高亮度發光二極管串并聯組成,1 個(或1 組)發光二極管的損壞并不影響整個信號燈的工作,可靠性好;電源模塊是將220 V 交流電轉換為24 V 直流電,給信號燈供電,使其正常工作;24 V 的直流電源可以直接給信號燈供電。主要通過RS232 接口與計算機的串口相連實現串口通信,計算機通過串口寫入數據將二進制代碼傳輸到LED 智能信號燈的數據接口,通過控制模塊將二進制代碼轉換為信號燈的亮滅交替變化,其工作原理圖如圖2所示。
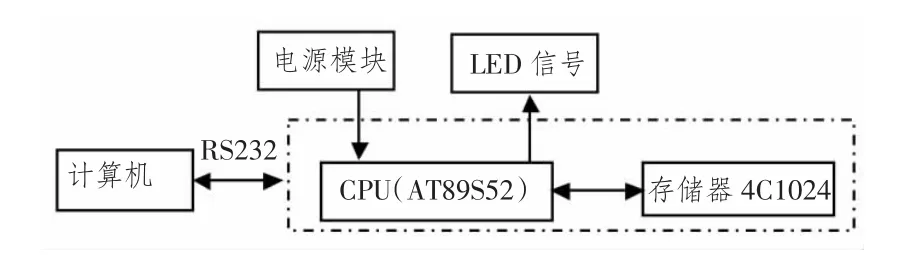
圖2 控制模塊的工作原理圖Fig.2 The principle of control model
控制模塊的電路板的CPU 采用AT89S52 單片機作為中心處理器,主要完成控制片外存儲器24C1024、控制光源工作、串口數據的發送和接收等功能;片外存儲器24C1024 存儲用戶編輯的數據(不大于200 組),避免斷電后數據丟失;與計算機的串口通信采用中斷方式,串口只要有數據就會及時接收;AT89S52 單片機對接收到的二進制碼進行分析和處理,通過內部的時鐘發生器定時對;單片機的特定外置I/O 口輸出端通過電流驅動電路后控制光源信號燈的有規律亮滅設定0 為滅,1 為亮。
在燈光通信的發送階段,用戶在燈光通信軟件的發送文本編輯框中輸入需要發送的通信信息或者選取常用的勤務符號和常用短語,則計算機將通信信息依次逐字進行二進制編碼操作,計算機串口與LED 智能信號燈串口相連進行串口通信,計算機將二進制編碼發送到智能信號燈的控制模塊CPU,根據這些二進制編碼AT89S52 單片機通過內部石英時鐘發生器定時對單片機的外置I/O 口進行相應的0、1 輸出控制,通過電流驅動電路后控制信號燈的定時亮滅,從而實現通信信息的自動發送[2]。
1.2 自動接收機的設計
燈光自動接收機子系統接收信息時,變焦攝像機主要將接收到的圖像實時采集到計算機顯示,用于對準目標,高速攝像機和高速采集卡實時記錄智能通信信號燈的亮滅閃爍情況,并將所記錄的視頻圖像信息傳送到接收機機的圖像識別處理軟件系統進行圖像分析和圖像處理,具體工作包括目標信號源的有效檢測、噪聲去除和二進制代碼生成,根據按一定規則制定的加密算法對此二進制代碼進行解密操作,然后通過字符編碼數據庫將信息進行譯碼操作,即把二進制代碼還原為通俗的字符信息,最終轉換成文字信息顯示到顯示屏上來,從而實現通信信息的自動接收[3],整個信息接收流程如圖3所示。

圖3 燈光接收流程Fig.3 The process of ship light receiver
跟蹤伺服子系統中高速攝像機、變焦攝像機隨電控轉臺同軸運動,轉臺控制器靈活控制轉臺的俯仰和水平方位角,通過計算機內顯示對方圖像畫面和控制手柄人工控制轉臺捕獲、對準及跟蹤目標。
1.3 高速攝像機的設計
根據設計參數要求,燈光通信自動接收機需要在艦船搖晃小于10°時,能夠進行人工對準,約10個漢字拼音/min,或者30 ~300 個莫斯碼/min,通信速率可調。
1)采樣頻率必須足夠高,也就是相機的幀頻必須足夠高。10 個漢字/min,1 個漢字平均少于5 個字母,則可換算為要發50 個字母/min,每個字母平均1.2 s。以莫斯碼中的最短時間短亮為單位計算,最長的為數字0,占21 個單位長度,如果在1.2 s 內發完則單位長度約為60 ms。由于莫斯碼只有4 種長度,亮的信號只有1 個單位長度的點,3 個單位長度的劃2 種,暗的信號只有1 個單位長度的碼間間隔和5 個單位長度的字母間間隔,只要能區分開1 個單位長度和3 個單位長度,即可達到系統要求。實驗證明,當幀長度小于最小單位長度的1/3 即20 ms 時即可鑒別出點和劃,考慮到系統冗余,最終確定相機幀頻為100 幀,幀長10 ms。
2)視場角必須足夠大。艦船晃動為10°時,在瞄準輔助裝置的配合下,通過手持對準,預計可穩定在5°以內。預選定的相機感光器大小為1/3 英寸,采用25 mm 焦距的鏡頭時其視場角約為6°。
工業相機的最大采集頻率與目標燈光信號的閃爍頻率有直接的關系,根據Nyquist 采樣定律,相機的最大采集頻率必須大于等于目標燈光信號最大閃爍頻率(燈光通信最小單位周期的倒數)的2 倍,才能保證采集過程中不會發生采樣信號混疊的現象。在實際的燈光通信過程中,信號燈光源的亮度殘留現象不可避免。故所設計的通信信號光源采用的LED 發光二極管組,LED 發光二極管的亮滅變化比傳統信號燈中的鎢絲白熾燈要迅速很多,但是依然不可避免有一定程度的亮度殘留,因此所選取的相機最大采集頻率必須要比理論計算值要大一些。理論上講,相機的采集頻率越大越好,但是考慮到頻率增大其價格極大上漲,且一般而言采樣頻率大相機耗能也較大,綜合以上各種因素,相機選用德國IDS 公司的UI-5220CP 型高幀頻工業相機[4]。
2 系統接收端軟件設計
由于實際船艇燈光通信中背景環境復雜多變,未知性非常大,難以對背景環境進行有效建模。為方便和簡單起見,采用人工分為以下2 種采集方式:
一是艦船晃動不大,利用先驗知識在圖像第1幀進行確定目標基本輪廓的方法,具體而言是用戶首先在第1 幀視頻圖像中用鼠標劃取1 個包含目標信號燈在內的矩形框,通過在此矩形框內提取目標信息進行分析和參數設定后分割出目標信號燈,將目標信號燈進行建模鎖定并將相關目標參數存儲到系統內存中,此后通過自動目標檢測跟蹤技術使得目標框始終能夠自動定位并檢測出目標信號燈[5]。
二是為了能夠在可能大幅度搖晃的船上跟蹤到目標信號燈,采用目標質心信息匹配和幀間圖像跟蹤匹配相結合的方法。目標質心信息匹配方法對于晃動幅度比較大的目標信號燈具有較好的跟蹤效果,但是在目標信號燈閃爍或是其他燈光干擾等因素的情況下,很容易丟失目標;幀間圖像跟蹤匹配是比較常用的通用視頻圖像跟蹤算法,它是依據視頻采集頻率一般較高,使得相鄰兩幀視頻圖像之間的目標信號燈的位置、大小、形狀等信息相差不大,可以充分利用前一幀目標信號燈的相關特征信息來計算出當前幀的目標信號燈的位置、大小、形狀等信息[6],從而實現目標的連續跟蹤,但是幀間圖像跟蹤匹配方法很容易造成誤差的累積,長時間跟蹤非常容易產生目標漂移,造成目標丟失和誤跟蹤。經過船艇實際的燈光通信,實驗將這2 種方法相結合,相互補充,對于目標信號燈的檢測和跟蹤具有很好的效果。
在實際視頻圖像目標跟蹤過程中,根據上一幀的目標框計算當前幀的框內光強,通過對此光強值進行閾值處理來判斷出框內所包含的目標信號燈是亮還是滅,將狀態“亮”量化為1,而狀態“滅”量化為0,從而實現本幀視頻圖像的二值化編碼。通過圖像分割等其他圖像處理技術對目標框內的圖像進行光斑檢測操作,假如目標框中檢測到光斑信號,則將所檢測到光斑中心更新為當前幀的目標框中心;假如目標框中未能檢測到光斑信號,則適當擴大目標框的范圍(目標框中心位置可以任務保持不變,主要增大目標框的長和寬),在目標框范圍內通過幀間圖像跟蹤和匹配算法對目標模型進行檢測跟蹤,將檢測到的目標光斑信號中心更新為當前幀的目標框中心,依次循環處理下一幀,得到一長串二進制編碼,通過船載PC 機預置的字符編碼數據庫對此二進制編碼進行譯碼操作,得到直觀的通信字符,并輸出到計算機屏幕上提供給接收方。
整個燈光通信接收端軟件流程如圖4所示。
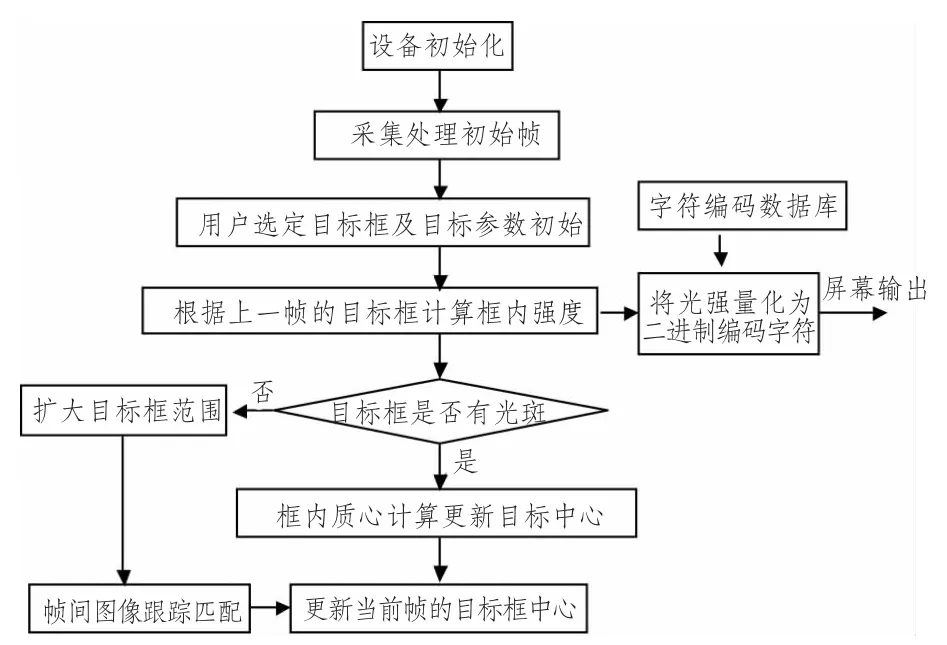
圖4 接收端軟件流程圖Fig.4 The software process of ship light receiver
3 試驗測試
燈光通信系統試制完成后,在相互距離分別為3,5 n mile 處進行了白天和夜晚的通信實驗。每單元試驗共進行1 000 組報文收發,同時記錄實驗數據,并對其進行對比和分析,如表1 與表2所示。
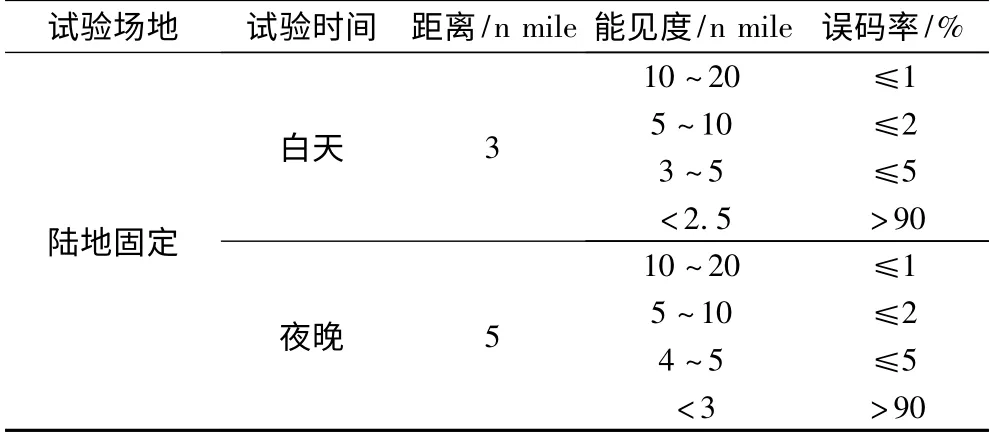
表1 陸地固定試驗場地試驗Tab.1 The experiment on fixed field
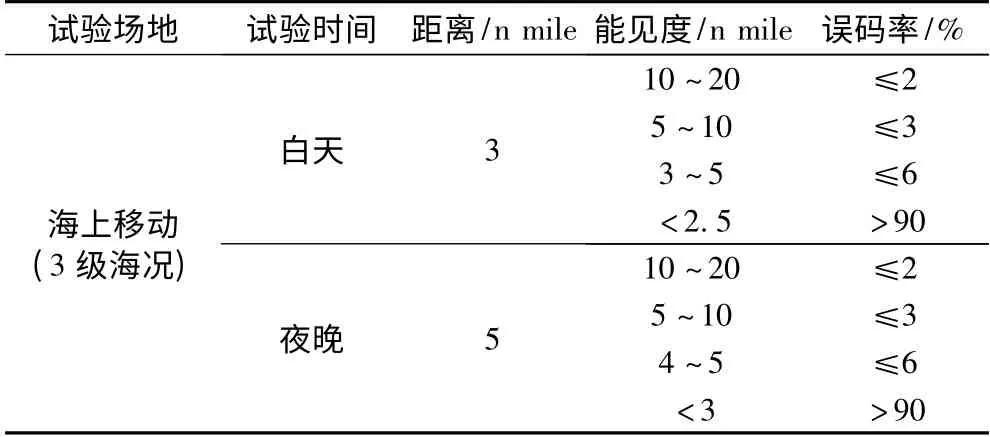
表2 海上移動試驗場地試驗Tab.2 The experiment on sea field
表1 試驗是在陸地固定試驗場進行,分別于白天相隔3 n mile 處及夜晚相隔5 n mile 處進行了試驗,試驗結果表明,在能見度比較良好的天氣條件下,誤碼率比較低;當能見度不良甚至肉眼都無法識別的情況下,誤碼率就比較高。表2 的試驗場地放置于移動海上2 艘船之間進行,由于艦船的搖擺會造成接受燈光的強度和方向的變化,誤碼率相對于固定場地來說比較高一些。通過以上試驗可以看出,在能見度大于3 n mile 以上時,本通信系統能夠進行有效的燈光通信。
4 結 語
本燈光通信系統分別在白天(雨天、晴天)、夜晚、能見度不好等天氣條件下都進行實驗,LED通信信號燈可根據天氣狀況進行亮度的調節,自動接收系統采用圖像分割、電子穩像等方法能夠快速有效地識別燈光信號,識別精度高,運行安全可靠,操作方便,可控性較好,人機界面靈活豐富。
[1]張曉敏.船舶燈光通信訓練模擬器的研制[J].集美大學學報,1996,1(2):53-58.
ZHANG Xiao-min.Study on the simulator of ship light communication[J].The Editorial Board of Jimei University(Natural Science),1996,1(2):53-58.
[2]郭颯.基于OPENGL 的燈光控制系統的實現[J].微計算機信息,2004,20(3):30-31.
GUO Sa.Realization of a light controling system based on OPENGL[J].Control & Automation,2004,20(3):30-31.
[3]劉新元,趙宇,馬永濤.嵌入式DRM+接收機的設計與實現[J].電子測量技術,2012,35(9):70-73.
LIU Xin-yuan,ZHAO Yu,MA Yong-tao.Design and implementation of the embedded DRM+receiver[J].Electronic Measurement Technology,2012,35(9):70-73.
[4]祝曉東,郁松年.利用非高速攝像機測量轉速的方法研究[J].計算機測量與控制,2012,20(1):52-56.
ZHU Xiao-dong,YU Song-nian.Researching of the method of measuring angle velocity based on non-high video camera[J].Computer Measurement & Control,2012,20(1):52-56.
[5]王嚦,馮馳.基于塊匹配的電子圖像穩定算法[J].成陽師范學院學報,2006,21(4):36-38.
WANG Yang,FENG Chi.Algorithm of electronic image stability based on block matching[J].Journal of Chengyang Normal University,2006,21(4):36-38.
[6]黃金權,王程,王潤生.基于投影特征的快速圖像穩定算法[J].計算機工程與科學,2006,28(1):82-85.
HUANG Jin-quan,WANG Cheng,WANG Run-sheng.A fast image stabilizing algorithm based on projected features[J].Computer Engineering and Science,2006,28(1):82-85.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
