臍帶纜對水下航行器動態響應的影響評估研究
2014-12-05 02:18:42章浩燕朱克強
艦船科學技術 2014年7期
章浩燕,朱克強
(寧波大學,浙江 寧波315211)
0 引 言
目前,由于無纜自主式有人或無人潛水器等深水工作系統在動力供應、數據傳輸、安全性、可靠性等方面還存在不少難以解決的問題,所以采用臍帶纜控制的潛水器在世界上仍然廣為使用[1-4]。臍帶纜控潛水器能夠安全有效地到達海洋深水區域,是深海作業的重要工具。操作員可以安全地呆在甲板上操縱潛水器,有效地完成危險環境下的作業任務。岸上平臺與潛水器之間通常由1 根臍帶纜連接,該纜索內部有光電傳輸芯線,用于向ROV 傳輸動力并保持可靠聯系,芯線外面由一層保護層包圍,用來承載水下單元和保護纜索內部芯線。由于它的動力是由支援船提供,所以潛水器原則上可以無限停留在海底作業地點。
纜索在帶來優點的同時也產生了如下幾個急需解決的難題:
1)實際操作和測量數據證明,系統主導運動是垂向運動,在靠近諧振頻率附近操作時,籠的升沉運動甚至要大于母船。在劇烈海況下,較大的垂向運動會導致罐籠附近的纜索瞬間松弛,而纜索再次收緊時,運動加速度可達0.5 g,從而產生巨大瞬間突變載荷,可導致臍帶纜保護層及其內部光電傳輸芯線結構的破壞,縮短臍帶纜的壽命,甚至切斷信息和能源的傳送,潛水器也就無法操作并危及它的回收。海況惡劣時,罐籠產生較大的垂向運動也會使潛水器入塢和回收困難。故該系統通常只能局限在平靜海況下使用。
2)臍帶電纜為潛水器提供動力和傳輸信息的同時,會增加潛水器的航行阻力(25 mm 直徑1 m長的纜索可以產生與0.5 m 直徑,3 m 長的拖魚同樣的阻力),纜索阻力會影響潛水器推進的動力需求,動力的增加反過來又需要更大的纜索直徑從而產生更大的阻力,這是一個典型的非線性設計環路問題。如果在設計中規定了系纜潛器的水下航速,或實際頂流能力,那么為了確定潛水器推進功率和運動姿態,就必須精確計算臍帶纜作用在潛器上的拉力大小。預報纜索最佳長度以使總阻力最小化。
3)纜索除了增加阻力外,還會發生臍帶電纜與后退、下沉中的ROV 本體或其他海底物件的糾纏,這是實際中最常見的事故。輕微的糾纏可能造成短暫的耽擱,比較嚴重的糾纏則可能導致潛水器棄置幾個月,甚至丟失。纏繞的重要原因是操作者無法察覺臍帶的形狀,以判斷哪些作業位置是否可以達到,或即使達到了,但潛器的姿態是否可以作業。這就要求實時計算出纜索動態構形。
對于許多海洋纜索系統,尤其是潛水器臍帶電纜,在邊界附近都存在著初始或潛在低張力區,觸底點附近完全撓性纜的張力為0。當纜索底端重物觸底時,纜索張力將急劇減少,引起整個系統的松弛。在纜索急速放出過程中,水面船狀態發生急速操縱,速度的變化也會引起纜索短暫的失去張力。不能采用目前廣為使用的完全撓性纜索連續模型,因為有數學奇異性的存在。雖然研究表明,在連續模型加入微小的彎曲剛度就能捕獲曲率、剪力的急劇變化,從而精確模擬低張力區纜索的運動特性。在纜索模型中計入的彎曲剛度附加值雖然很小,但卻能使得能量越過低張力區,消除零張力區的奇異性,提高解的穩定性,但由于求解效率較低,往往需要將彎曲剛度影響較大的區域與纜索其他的區域分開來提高求解的效率。
本研究對系統建立三維空間運動通用數學模型,可以全面反映臍帶纜-潛水器多體之間的非線性耦合運動;非均勻臍帶纜運動考慮為三維,能真實地反映纜索的各種非均勻性,適應較復雜的潛器機動狀態;為了克服柔性纜在大曲率——時間變化率時的易于發散性,采用自動變步長數值積分技術,以模擬比較復雜的耦合運動響應。由于對系統建立了最一般的空間運動模型,反映了二者的耦合運動,從而更加接近實際,可為進一步研究系統閉環特性提供基礎。
1 纜索的動態響
1.1 坐標系建立
為了分析纜索運動及其對航行器的影響,建立3 套坐標系:地面坐標系,纜索的局部坐標系及航行器運動坐標系。設地面標系(i,j,k),原點設為E;航行器運動坐標系(iv,jv,kv)以航行器的質心G作為坐標原點,縱軸iv平行于航行器的橫搖軸并指向航行器前進方向,橫軸jv平行于縱搖軸并指向右舷。航行器運動坐標系與地面坐標系之間的關系可以用歐拉角的形式表示:
式中:c·=cos·;s·=sin·;φ,θ,ψ 分別為航行器的橫搖角、縱搖角以及首搖角。
對橫搖角φ,縱搖角θ,首搖角ψ 的定義如下:橫搖角φ:jv與平面(i,k)之間的夾角;縱搖角θ:iv與水平面(i,j)之間的夾角;首搖角ψ:iv軸在水平面(i,j)上的投影與i 軸之間的夾角。局部坐標(τ,n,b)表示纜索上的某點,τ 表示纜索的切線方向,且指向纜索伸長的方向,b 在(i,j)平面內。該坐標系由地面坐標系通過以下3 次旋轉得到:1)將坐標系(i,j,k)繞著k 軸逆時針旋轉α 角,使得i 與平面(τ,n)平行;2)將步驟1 所得的(i,j,k)坐標系繞著i 軸順時針旋轉π/2,使得k 與b 軸方向一致;3)將步驟2 所得的(i,j,k)坐標系繞著b 軸旋轉β 角,使得i,j 分別與τ,b 軸的方向一致。因此,纜索的局部坐標系與地面坐標系之間的關系可用下式表示:

其中,
綜合式(1)~式(4),可以得到纜索的局部坐標系與航行器動態坐標系之間的關系為:

1.2 動力方程
定義速度:

式中:t 為航行器運動時間;s 為從拖點開始的總弧長;T 為纜索內部張力;Vc=[VτVnVb]T為纜索某點處的速度向量。因此,纜索的動態方程可以用以下偏微分方程表示:
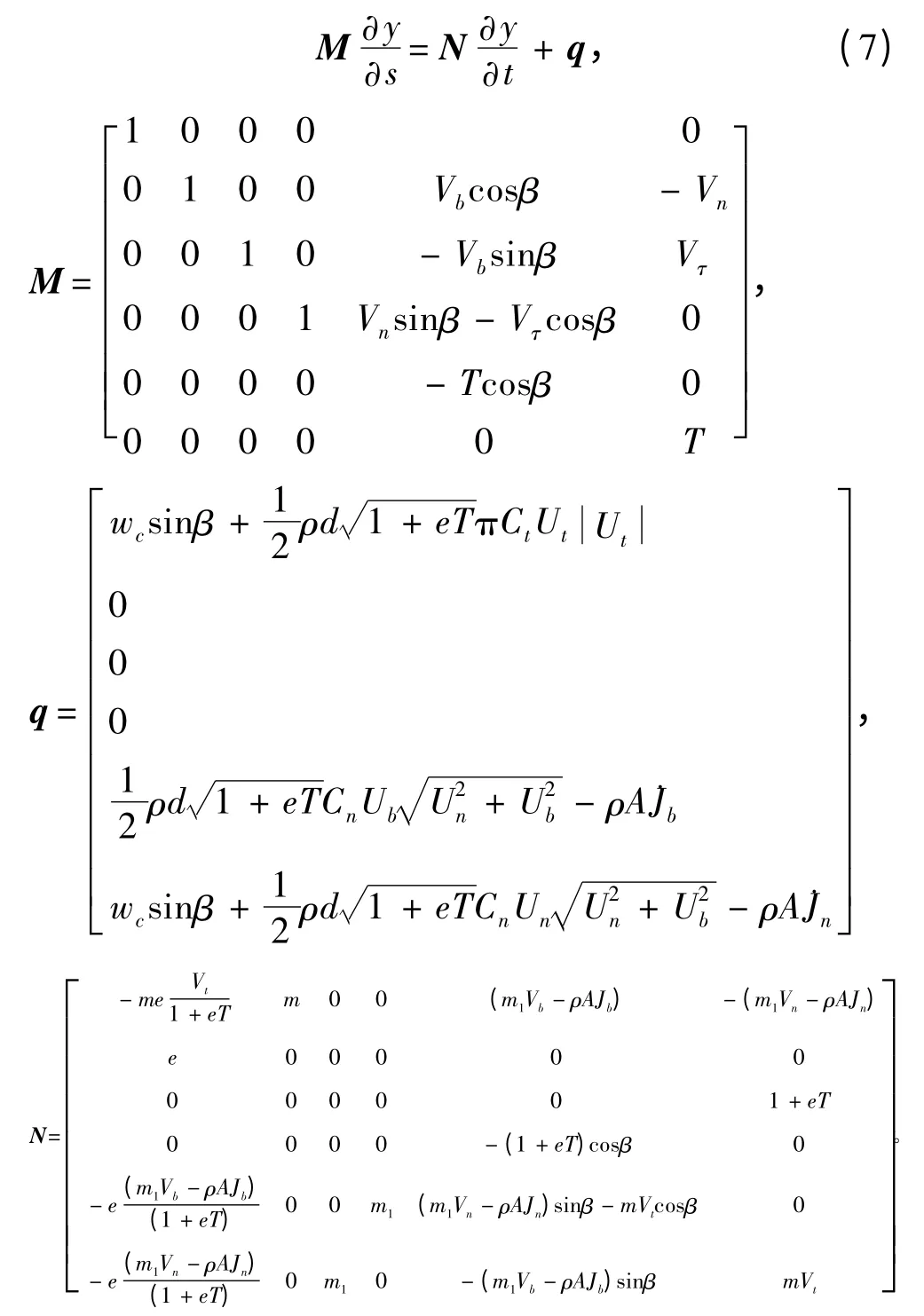
式中:ρ 為流體密度,kg/m3;m 為單位長度纜索的質量,kg/m;A 為纜索未伸長前的橫截面積,m2;m1為單位長度纜索的實際質量,m1=m+ρA,kg/m;wc為水中纜索單位長度的重量,N/m;e 為1/EA;Ct為流體切向拖曳系數;Cn為流體法向拖曳系數;d 為纜索拉伸后的直徑,m;J=[JτJnJb]T為用局部坐標系[τnb]為流體的順勢速度,m/s;U=[UτUnUb]為纜索的相對速度,U=Vc-J,m/s。
1.3 邊界條件
為解得纜索的動態方程(7),需要給出纜索的初始形態以及6 個邊界條件。浸在水中的纜索有2個端頭,即連接航行器的拖點端以及與岸上的滾筒端。由于纜索作用力直接影響拖點處的速度,于是得到3 個邊界條件:拖點相對于航行器坐標系原點的矢徑可以表示為rc=[xcyczc]T,航行器坐標原點相對于纜索坐標的運動速度可以表示為V=[uvw]T,其中(u,v,w)分別表示縱蕩速度、橫搖速度及垂蕩速度,航行器繞其質心G 的轉動角速度可以表示為Ω=[pqr]T,其中(p,q,r)分別表示航行器的橫搖角速度、縱搖角速度以及首搖角速度。因此,在航行器坐標系中,拖點的速度可以表示為(V+Ω×rc)。式(5)中,拖點在纜索局部坐標系中的速度可以表示為:

上式為下端的3 個邊界條件。由于滾筒對纜索主要產生切向的作用力,因此滾筒端部法向和副法線方向的速度為0:
其中St為t 時刻浸在水中的纜索總長。為了給出第6個邊界條件,可以考慮纜索滾筒的滾動。由牛頓第二定律可以給出:
式中:Id為滾筒的轉動慣量;Ωd為滾筒的角速度;Γ為纜索張力在滾筒端部產生的力矩;Γf為纜索樞軸與滾筒間滑動摩擦力產生的阻力矩。因為,Ωd=-Vt(St,t)/Rd;Γ=T(St,t)/Rd,其中,Rd表示滾筒的半徑,滾筒的動態方程可以被重新寫成:

1.4 纜索的影響
纜索張力的初始值為T(0,t)t(0,t),因此為了計算方便,可以將航行器受到的其他作用力通過式(5)在航行器運動坐標系中用張力表示如下:
其中,

因此,在航行器動態坐標系中,纜索拖點處由纜索引起的力矩可以表示為:
2 數值解法
在邊界條件式(8)~式(11)下,解偏微分方程(7)的數值法可以采用差分方法,將方程按時間和空間離散化來處理。然而,和一般的拖曳系統不同的是,纜索的長度不再是定值,隨著航行器前移,纜索的浸水長度逐漸增大。而且,t 時間內纜索浸水總長取決于纜索的切向速度- Vt(Sτ,τ)dτ,假設纜索浸水長度的初值為0,則

由于纜索長度隨著時間不斷變化,若將纜索分為多個片段,則片段的數目將隨著拖曳時間的增加而增大,因此無法將纜索切分為定長度定數目的片段,然而差分格式只有每個片段的長度都固定的情況下才生效。將式(14)按時間步長Δt 進行離散化,即:

其中Sk(k=1,2,…)為kΔt 時間內纜索的總浸水長度。也就是說,kΔt 時間內的纜索浸水長度可以被切分為k 個纜索片段,其長度表示為:

當Δt →0 時,纜索片段的長度可以近似為

其中ti=iΔt,因此k 個纜索片段的長度可以由前一時刻的速度所確定。
綜合式(15)~式(17),可以得到

因此,k+1 時刻纜索的總浸水長度為

確定纜索片段的長度后,方程(7)可以用有限元二階近似法進行求解。假設tk時刻,纜索的形態已知,即y(Si,tk),i=0,1,…,k 已知,那么問題就轉換為預測tk+1時刻纜索的形態,即求解y(Si,tk+1),i=0,1,…k+1,其中,Sk+1由式(19)確定。
定義
其中S0=0。注意到,由于ΔSk+1在tk時刻還未入水,式(21)中y(Sk+1,tk)由滾筒的滾動統一定義,即

而且,方程(7)仍然可以用于求解新的入水片段的動態近似解,而且,當纜索浸水長度不大時,模型的誤差可以忽略不計。應用方程(7)求解(Sj-1/2,tk+1/2),j=1,2,…,k+1 的微分方程如下:
其中j=1,2,…,k+1。式(22)為j=k+1 時,纜索新入水片段的近似動態方程。剩余6 個方程式由上述6 個邊界條件得出:
綜合式(22)~式(26),共可得到6(k+2)個非線性方程,其中k 可以求得。因此,對纜索的影響可以轉化解這6(k+2)個方程的問題。由于這6(k+2)個方程都跟拖曳前行的時間有關,因此,在求解之前應該估算出拖曳的結束時間,這可以通過設定纜索的實際總長來實現。求tk+1時刻,纜索對航行器的影響,可以通過將tk+1代入式(12)和式(13)中進行求解得到。綜上所述,數值法評估纜索對航行器影響的步驟如下:
1)設定邊界條件。設定步長Δt和總時間T。設初始時刻tk=t0=0 時,纜索的浸水長度為0,航行器末端與滾筒端一致。于是,纜索的初始形態y(Sk,tk)可通過將t=0,航行器的初始狀態參數(u,v,w,p,q,r,φ,θ,ψ)代入式(8)~式(11)來求解。
2)給出航行器tk+1=(k+1)Δt 時刻航行器的狀態參數(u,v,w,p,q,r,φ,θ,ψ)。航行器每一時刻的狀態參數可通過航行器上的傳感機器來實時測量,或者通過航行器的動態模型來預測。
3)解非線性方程(22)~(26)。方程可通過Matlab 優化工具箱來進行求解。
4)求纜索的影響。將y(0,tk+1)及t=tk+1代入式(12)和式(13)。
5)k ←k+1。
6)若k ≤T/Δt 則回到步驟2,否則停止操作。
3 評估纜索對水下航行器的影響
水下航行器上纜索為細長,輕質等浮力纜索,連接在航行器的尾部,該連接點在航行器的動態坐標中表示為rc=(-0.5,0,0)。滾筒連接處纜索的張力可以忽略不計,即纜索樞軸與滾筒間滑動摩擦力產生的阻力矩Γf=0。纜索的相關參數及流體的相關參數如下:
ρ=1000,m=0.0049,A=4.9E-6,m1=0.0098,we=0,e=0,Ct=0.01,Cn=1.0,d=0.0025
3.1 纜索影響的評估
由于受到模型參數不精確的影響,水下航行器的動態模型有所誤差。為了單獨對纜索的影響進行評估,這里航行器自身的運動不做研究。由于水下航行器的控制包括前進速度、航向及航行器沉深3 個方面,為了簡化計算,本文只考慮直航情況下,航行器水平直航情況:u=1,v=w=0,p=q=r=0,φ=θ=ψ=0。
圖1 為直航時拖點處的張力變化圖。從纜索拖曳力隨時間近乎線性增長可以推斷,當航行器的驅動力保持不變時,航行器將減速。換言之,要維持航行器勻速前移,驅動力必須相應增加。由于離散的偏微分方程無法用解析法進行求解,而用數值法解也并不容易。然而,上述情況中,將偏微分方程(7)與邊界條件式(8)~式(11)聯立時可以用解析法進行求解。纜索被航行器拖入靜水中保持勻速縱蕩時,必須在航行器運動方向上維持自身的形態。因此,纜索上的局部坐標系與慣性坐標系之間的方向角不隨空間或時間的變化而變化:
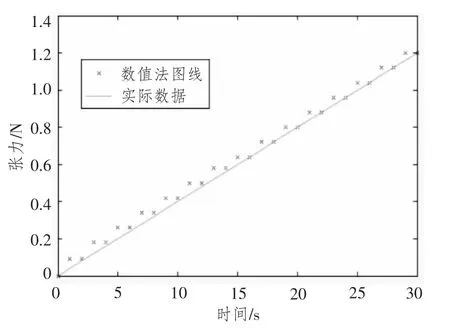
圖1 航行器直航時纜索張力的變化情況Fig.1 Simulation results of cable drag under straight ahead motion

根據纜索局部坐標(τ,n,b)的定義,水平運動時方向角的大小為:

本文所研究的纜索為非彈性纜索,因此沿纜索方向的速度均為常數:

將式(28)和航行器相關運動參數代入邊界條件(8)中,得到:

因此,纜索速度隨時間的變化量也為0,即:

將式(27)~式(31)代入式(7)得到:

又由邊界條件式(11)可得:

由式(32)和式(33)可得:

因此拖點處的張力為:

該式表明,拖點處纜索的張力與纜索浸水長度成正比。進一步分析,可以從式(14)得出:

綜上所述,并結合纜索的相關參數,拖點處纜索的張力可以表示為:

4 結 語
1)直航時拖曳處的纜索張力隨時間的增加近乎線性增大,也即隨著纜索長度的增加而增大;
2)可根據纜索拖點處所能承受的最大張力值,來指導拖曳距離或沉深,以避免拖曳過程中臍帶纜索斷裂;
3)隨著拖曳時間的推移,若航行器的助推力保持不變,航行器將減速前移,而不能保持原來的勻速運動,因此,結論1)也可用以指導航行器助推力的變化;
4)在設計帶纜航行器的自動駕駛裝置時,應將纜索的影響考慮在內。這種設計,采用復合結構,包含1 個反饋路徑和1 個前饋通路。其中,反饋控制器補償無纜航行器的運動誤差,而前饋控制器補償纜索運動對水下航行器產生的影響。這使得無纜航行器的自動控制成為了可能,這種自動控制裝置將是今后研究的重點。
[1]朱克強,李維揚.海洋纜體系統三維動態分析[C].全國離岸工程學會論文集(上冊),1989:1-7.
[2]朱克強,曹奇英,施國慶.分段曳力系統在纜體系統仿真中的應用[J].華東船舶工業學院學報,1993,7(1):18-24.
ZHU Ke-qiang,CAO Qing-ying,SHI Guo-qing.Appieation of seetional drag coeffieient to the cable 一body system modelin g[J].Journal of Zhenjiang Zhipbuilding Institute,1993,7(1):18-24.
[3]施國慶,朱克強.水下纜控潛水器運動特性研究[J].華東船舶工業學院學報,1993,7(3):1-9.
SHI Guo-qing,ZHU Ke-qiang.The motion characteristic analysis of tethered remotely operated driving vehicle[J].Journal of East China Shipbuilding Institue,1993,7(3):1-9
[4]朱克強.艦舶與水下拖體系統耦合運動的非線性數值模擬[J].華東船舶工業學院學報,1993,7(4).
ZHU Ke-qiang.The nonlinear numerical simulation of ship and underwater towed body system coupling motion[J].Journal of East China Shipbuilding Institue,1993,7(4):51-57.
[5]朱克強.水下遙控航行器的模擬與控制[J].中外船舶科技,1994(4).
[6]章浩燕,朱克強,張洋,等.水下拖曳纜索二維幾何形態的研究[J].艦船科學技術,2013,35(4):35-39.
ZHANG Hao-yan,ZHU Ke-qiang,ZHANG Yang,et al.Research on the two-dimensional cable geometries of a towed submersible[J].Ship Science and Technology,2013,35(4):35-39.
