車載激光點(diǎn)云與全景影像的配準(zhǔn)研究
2014-08-01 01:04:58聶倩蔡元波林昀陳長軍
遙感信息 2014年1期
聶倩,蔡元波,林昀,陳長軍
(1.寧波市測繪設(shè)計(jì)研究院,浙江 寧波 315042;2.武漢大學(xué) 測繪學(xué)院,武漢 430079)
1 引 言
地面三維激光掃描技術(shù)采用非接觸主動測量方式直接高速獲取高精度、高密度、超高分辨率的三維空間信息,已成為快速獲取城市空間信息的全新技術(shù)手段[1-3]。雖然很多地面激光掃描儀可通過內(nèi)置相機(jī)同步獲取掃描點(diǎn)的紋理,但是其分辨率、攝影方式、精準(zhǔn)度等均不能滿足應(yīng)用的需要。而全景成像技術(shù)是一種超廣角視野表達(dá)方式,它包含了比圖像序列更直觀、更完整的場景信息,同時可供用戶自由轉(zhuǎn)換視角。因此,目前以高速地面三維激光掃描儀和全景相機(jī)為核心傳感器,并輔以GPS、IMU進(jìn)行激光掃描傳感器定位定姿的移動測量系統(tǒng)正在興起[4-9],例如Topcon的IP-S2系統(tǒng)、寧波測繪院的移動測量系統(tǒng)等。
基于激光掃描儀和全景相機(jī)的移動測量系統(tǒng)用于城市快速三維測量與重建的一個關(guān)鍵步驟就是點(diǎn)云與全景影像的高精度配準(zhǔn)[10]。目前,關(guān)于點(diǎn)云與普通CCD影像的配準(zhǔn)已經(jīng)有很多研究成果:共線方程解法、直接線性變換法、角錐體法等[11-12],而對于車載點(diǎn)云與全景影像的配準(zhǔn)研究則鮮有進(jìn)展。由于激光點(diǎn)云和全景影像在數(shù)據(jù)表現(xiàn)形式和屬性上均有很大差異,因此傳統(tǒng)的遙感配準(zhǔn)方法不能完全適用于這兩類數(shù)據(jù)的配準(zhǔn)。針對上述問題,本文提出一種車載激光點(diǎn)云與全景影像配準(zhǔn)方法,該方法利用POS數(shù)據(jù)和各個傳感器間的相對空間位置關(guān)系建立點(diǎn)云與單張面陣CCD影像間的對應(yīng)關(guān)系,然后根據(jù)全景影像與單張面陣CCD影像間的映射關(guān)系,從而實(shí)現(xiàn)車載激光點(diǎn)云與全景影像的高精度配準(zhǔn)。
2 移動測量系統(tǒng)的組成及工作原理
本文的移動測量系統(tǒng)是由寧波市測繪設(shè)計(jì)研究院和武漢大學(xué)共同開發(fā)研制,它以帕拉丁汽車為移動平臺,集成安裝了1部高精度慣性導(dǎo)航設(shè)備(GPS/IMU)、1臺高分辨率全景相機(jī)、2臺RIEGL公司不同型號激光掃描儀VZ-400和LMS-120i、1臺同步控制單元以及4臺工控計(jì)算機(jī)。
本文的移動測量系統(tǒng)所有傳感器被固定在移動平臺上,采用系統(tǒng)標(biāo)定建立其嚴(yán)格幾何關(guān)系,并通過同步控制系統(tǒng)觸發(fā)脈沖來實(shí)現(xiàn)各傳感器數(shù)據(jù)的同步采集。當(dāng)車輛以一定速度勻速行駛時,GPS和IMU同時觀測記錄各傳感器的位置和姿態(tài)數(shù)據(jù),VZ-400和LMS-120i掃描儀分別獲取車輛兩側(cè)和地表面的點(diǎn)云信息,全景相機(jī)采集城市街景影像,從而實(shí)現(xiàn)全方位場景下的三維空間信息和紋理信息獲取。
3 車載激光點(diǎn)云與全景影像的配準(zhǔn)
如圖1所示,本文移動測量系統(tǒng)的全景相機(jī)由8個面陣CCD鏡頭構(gòu)成,面陣CCD相機(jī)采用框幅式成像方式仍滿足中心投影構(gòu)像方程,在每個采樣時刻獲取8張面陣CCD影像,然后將8張影像進(jìn)行球面投影和拼接處理,從而形成全景影像。由于全景成像系統(tǒng)的8臺CCD相機(jī)為非量測工業(yè)相機(jī),其成像存在較大的畸變,因此本文首先對單臺面陣CCD相機(jī)進(jìn)行標(biāo)定以獲取其內(nèi)方位元素和畸變參數(shù),然后利用VZ-400掃描儀可以靜態(tài)掃描特性,建立單臺CCD相機(jī)的像空輔坐標(biāo)和VZ-400掃描儀坐標(biāo)系間的平移和旋轉(zhuǎn)關(guān)系,并基于POS數(shù)據(jù)和各個傳感器間的相對空間位置信息實(shí)現(xiàn)激光點(diǎn)云和單張面陣CCD影像間的配準(zhǔn),最后利用全景影像與單張CCD影像間的映射關(guān)系實(shí)現(xiàn)點(diǎn)云與全景影像的配準(zhǔn)。圖1給出了車載點(diǎn)云與全景影像的配準(zhǔn)流程。
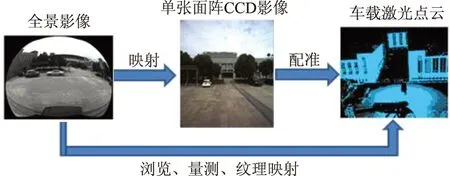
圖1 車載點(diǎn)云與全景影像配準(zhǔn)的原理
3.1 單臺面陣CCD相機(jī)的標(biāo)定
為了消除畸變對配準(zhǔn)精度的影響,本文采用張正友提出的平面標(biāo)定法進(jìn)行單臺面陣CCD相機(jī)的標(biāo)定試驗(yàn),以確定單鏡頭的內(nèi)參數(shù)和畸變系統(tǒng),從而消除相機(jī)畸變對配準(zhǔn)精度的影響。具體實(shí)施步驟如下:
(1)對全景相機(jī)的每一個鏡頭,采用平面棋盤格作為標(biāo)定物,獲取不同視角下的多張圖像。
(2)利用Harris算子進(jìn)行影像特征點(diǎn)的提取。
(3)在不考慮徑向及切向畸變的情況下,利用旋轉(zhuǎn)矩陣的正交性,求解相機(jī)的內(nèi)參數(shù)(f,x0,y0)。
(4)利用最小二乘法估算相機(jī)的徑向和切向畸變系統(tǒng)(k1,k2,p1,p2),并利用最大似然估計(jì)原則整體優(yōu)化所有參數(shù)。
3.2 車載激光點(diǎn)云與單張面陣CCD影像間的配準(zhǔn)
由于全景成像系統(tǒng)在每一個采樣瞬間獲得8張面陣CCD影像,以面陣CCD相機(jī)m為例詳細(xì)介紹其與車載點(diǎn)云間的配準(zhǔn)。對于某一個地面目標(biāo)點(diǎn),其所對應(yīng)像點(diǎn)的像空輔坐標(biāo)與同名點(diǎn)云的掃描儀坐標(biāo)間存在如下對應(yīng)關(guān)系:
(1)
由于移動測量系統(tǒng)各傳感器間進(jìn)行了嚴(yán)格標(biāo)定,即掃描儀坐標(biāo)系L、慣導(dǎo)坐標(biāo)系G和WGS-84系W間的轉(zhuǎn)換關(guān)系在系統(tǒng)標(biāo)定時已確定,如式(2)和式(3)所示。
(2)
(3)
其中,RLG和TLG分別表示掃描儀坐標(biāo)系和慣導(dǎo)坐標(biāo)系間的旋轉(zhuǎn)矩陣和平移量;RGW和TGW表示慣導(dǎo)系和WGS-84系間的旋轉(zhuǎn)矩陣和平移量。
綜合式(1)~式(3),可建立單張面陣CCD影像的像點(diǎn)像空輔坐標(biāo)與其WGS-84坐標(biāo)間的轉(zhuǎn)換關(guān)系:
(4)
(5)
CPW=TGW+RGWTLG+RGWRLGCPL
(6)
由于車載系統(tǒng)經(jīng)過嚴(yán)格標(biāo)定,即RLG、RGW、TLG和TGW已知,故RPW和CPW的解算可以轉(zhuǎn)換為RPL和CPL的求解問題。因此,本文將移動測量系統(tǒng)進(jìn)行靜態(tài)掃描和拍照,利用單張CCD影像的n個像點(diǎn)和同名點(diǎn)云的掃描坐標(biāo),由式(1)列出誤差方程,并根據(jù)最小二乘平差原理進(jìn)行旋轉(zhuǎn)矩陣RPL和平移向量CPL的解算,最后基于POS數(shù)據(jù)和各傳感器間的相對空間位置信息實(shí)現(xiàn)車載激光點(diǎn)云與單張CCD影像間的配準(zhǔn)。注意:由于全景成像系統(tǒng)與激光掃描儀在車輛平臺上的位置是固定的,即相機(jī)m和掃描儀間的轉(zhuǎn)換參數(shù)RPL和CPL一旦確定,則車載系統(tǒng)在采集數(shù)據(jù)中可實(shí)現(xiàn)點(diǎn)云與影像的實(shí)時配準(zhǔn)。
3.3 全景影像與單張CCD影像間的映射
假設(shè)面陣CCD影像m(m=1,2,…,8)上任意像點(diǎn)A的像素坐標(biāo)為(i,j),則對應(yīng)全景球的三維點(diǎn)坐標(biāo)為(xS,yS,zS),將影像投影到球面生成球面坐標(biāo)系以(θ,φ,r)表示,其中θ為水平旋轉(zhuǎn)角,φ為俯仰角,r為球體半徑,根據(jù)空間直角坐標(biāo)與球面坐標(biāo)的轉(zhuǎn)換關(guān)系,可得:
(7)
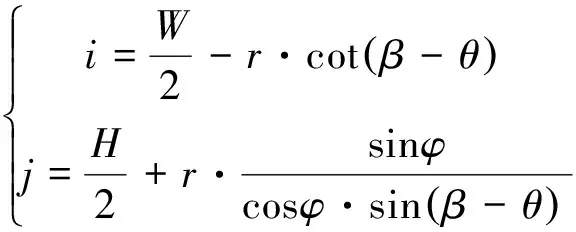
(8)
其中,β為相機(jī)光軸繞垂直軸Y軸的旋轉(zhuǎn)角度,對于相機(jī)m而言,β=45×(m-1);W和H分別為面陣CCD影像m的長度和寬度。
根據(jù)全景影像上任意一點(diǎn)的三維坐標(biāo)(xS,yS,zS)可由式(7)和式(8)確定它所對應(yīng)的單張面陣CCD影像上的像點(diǎn)行列號,進(jìn)而依據(jù)式(4)實(shí)現(xiàn)全景影像與車載激光點(diǎn)云間的配準(zhǔn)。
4 試驗(yàn)及分析
為了驗(yàn)證本文配準(zhǔn)方法的正確性和可靠性,首先對全景成像系統(tǒng)的8個面陣CCD鏡頭進(jìn)行平面板標(biāo)定試驗(yàn),以確定其內(nèi)方位元素和畸變系數(shù),然后利用車載系統(tǒng)進(jìn)行靜態(tài)掃描和拍照,解算單臺CCD相機(jī)與掃描儀坐標(biāo)系間的旋轉(zhuǎn)平移關(guān)系。最后采用車載移動測量系統(tǒng)對寧波市聚賢路周邊區(qū)域進(jìn)行了激光點(diǎn)云和全景影像采集試驗(yàn)。表1為單臺面陣CCD相機(jī)的標(biāo)定結(jié)果;表2為面陣CCD相機(jī)與激光掃描儀間的轉(zhuǎn)換關(guān)系;圖2和圖3為車載點(diǎn)云與全景影像的配準(zhǔn)結(jié)果。
本文通過由配準(zhǔn)后全景影像的像點(diǎn)反算其對應(yīng)點(diǎn)云的物方坐標(biāo),并與檢查點(diǎn)的實(shí)測物方坐標(biāo)進(jìn)行對比分析,從而定量評價(jià)車載點(diǎn)云與全景影像的配準(zhǔn)精度。本文選取了13個檢查點(diǎn)進(jìn)行實(shí)驗(yàn)分析,其中X、Y是利用全站儀獲取的檢查點(diǎn)在WGS-84高斯投影坐標(biāo)系下的平面坐標(biāo);X′、Y′是全景影像像點(diǎn)所對應(yīng)的同名點(diǎn)云的物方坐標(biāo)。由表3可以看出,通過13個檢查點(diǎn)的全景像點(diǎn)坐標(biāo)反算點(diǎn)云物方坐標(biāo)與實(shí)測坐標(biāo)的比對,可以看出車載點(diǎn)云與全景影像整體可達(dá)到0.1的平面中誤差。因此,利用本文方法進(jìn)行車載點(diǎn)云與全景影像的配準(zhǔn)后,由全景影像實(shí)現(xiàn)地物量測可以滿足城市大比例尺測圖的精度要求。
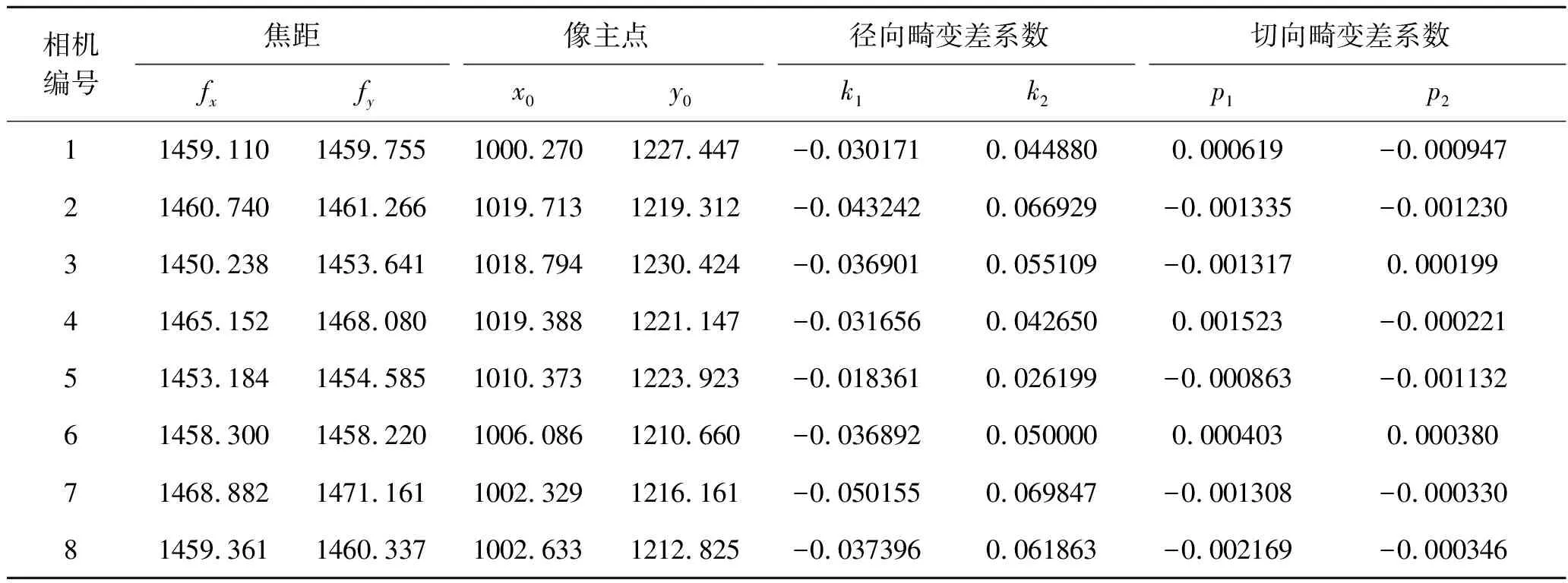
表1 單臺面陣CCD相機(jī)的標(biāo)定結(jié)果
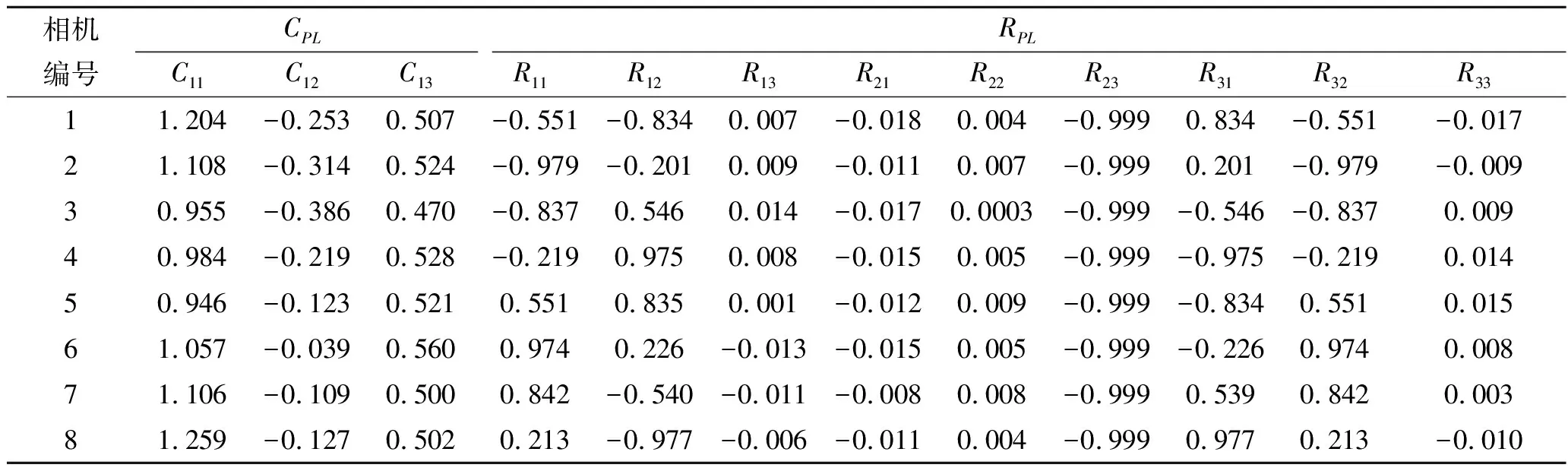
表2 單臺面陣CCD相機(jī)與VZ-400掃描儀間的轉(zhuǎn)換關(guān)系
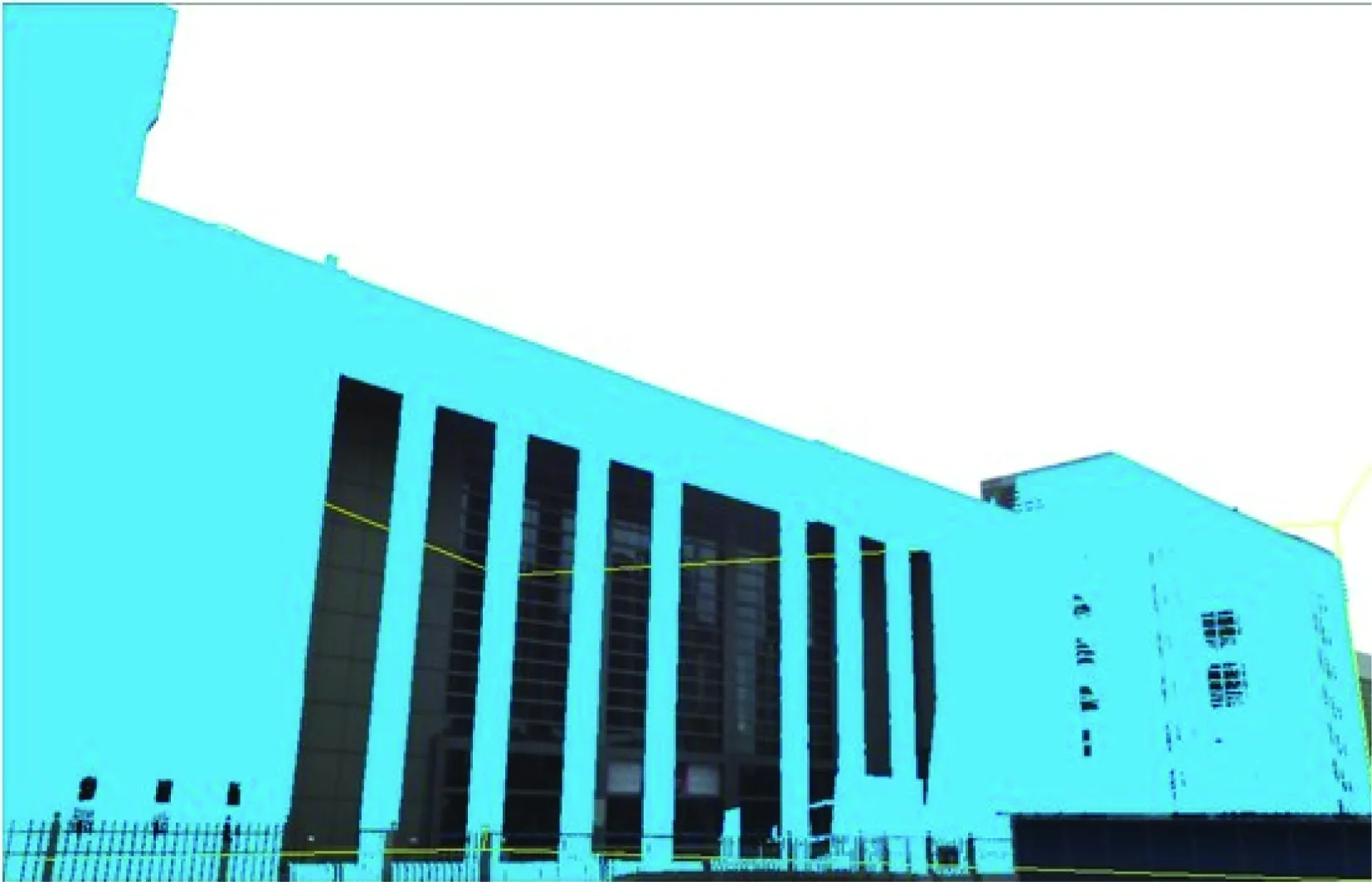
圖2 車載點(diǎn)云與全景影像絕對配準(zhǔn)后的結(jié)果
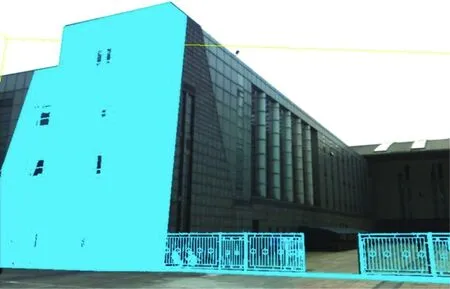
圖3 車載點(diǎn)云與全景影像絕對配準(zhǔn)后的局部效果
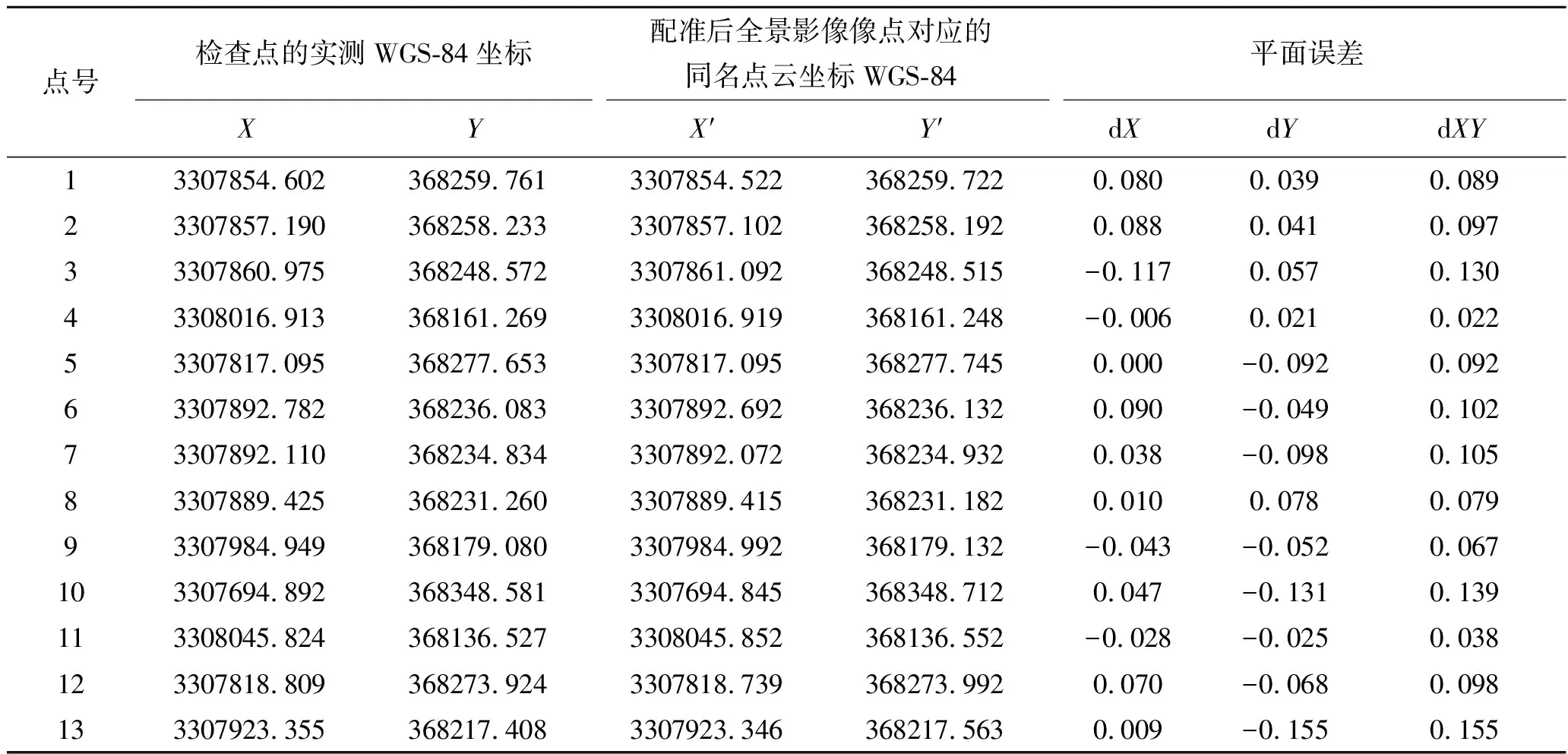
表3 配準(zhǔn)結(jié)果精度(m)
5 結(jié)束語
本文對車載三維激光點(diǎn)云與全景影像的配準(zhǔn)進(jìn)行研究,首先利用POS數(shù)據(jù)和各個傳感器間的相對空間位置關(guān)系建立點(diǎn)云與單張面陣CCD影像間的對應(yīng)關(guān)系,然后根據(jù)全景影像與單張面陣CCD影像間的映射關(guān)系,從而實(shí)現(xiàn)車載點(diǎn)云與全景影像的高精度配準(zhǔn)。試驗(yàn)結(jié)果表明,本文配準(zhǔn)方法簡單,可以達(dá)到0.1m的平面精度,基于配準(zhǔn)后的全景影像進(jìn)行地物量測可滿足城市大比例尺測圖的精度要求。
參考文獻(xiàn):
[1] 張毅.地面三維激光掃描點(diǎn)云數(shù)據(jù)處理方法研究[D].武漢大學(xué),2008.
[2] 馬洪超,姚春靜,鄔建偉.利用線特征進(jìn)行高分辨率影像與LiDAR點(diǎn)云的配準(zhǔn)[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2012,37(2):136-140.
[3] 楊勇,鐘若飛,康永偉,等.車載激光與單目線陣相機(jī)的數(shù)據(jù)融合[J].首都師范大學(xué)學(xué)報(bào),2010,31(2):82-87.
[4] 張卡,盛業(yè)華,葉春,等.車載三維數(shù)據(jù)采集系統(tǒng)的絕對標(biāo)定及精度分析[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2008,33(1):55-59.
[5] 陳允芳,葉澤田.IMU/DGPS輔助車載CCD及激光掃描儀三維數(shù)據(jù)采集與建模[J].測繪科學(xué),2006,31(5):91-92.
[6] HAALA N,PETER M,KREMER J.Mobile LiDAR mapping for 3D point cloud collection in urban areas:A performance test[J].In:ISPRS,2008(37):1119-1124.
[7] RIEGER P,STUDNICKA N,PFENNINGBAUER M.Boresight alignment method for mobile laser scanning systems[EB/OL].http://www.geomatik-hanmburg.de/tls/tls2.
[8] HAMMOUDI K,DORNAIKA F,PAPARODITIS N.Extracting building footprints from 3d point clouds using terrestrial laser scanning at street level[C].2009 International Conference on CMRT09 IAPRS,Paris,2009.
[9] HAN Y M,WANG L.A novel approach to calibrating the line scan camera of Vehicle-borne 3D data acquisition system[C].2010 International Colloquium on Computing,Communication,Control,and Management,2010.
[10] 陳為民.基于全景成像與激光掃描的城市快速三維測量與重建技術(shù)研究[D].武漢大學(xué),2012.
[11] 王國利,王晏民.地面激光點(diǎn)云多源約束的穩(wěn)健整體配準(zhǔn)[J].測繪通報(bào),2012,(1):20-21.
[12] 王宴民,胡春梅.一種地面激光雷達(dá)點(diǎn)云與紋理影像穩(wěn)健配準(zhǔn)方法[J].測繪學(xué)報(bào),2012,41(2):266-272.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45