一種基于掃描點云數據儲氣罐支柱形變監測新方法
2014-08-01 01:05:00李章樹馬磊馬小雪謝瀟莊逐舟
遙感信息 2014年1期
關鍵詞:變形
李章樹,馬磊,馬小雪,謝瀟,莊逐舟
(1.西華大學建筑與土木工程學院,成都 610031;2.南京大學地理與海洋科學學院,南京 210046;3.中國建筑西南勘查設計院有限公司,成都 610031;4.寧夏大學資源環境學院,銀川 750021)
1 引 言
本次實驗的主要構筑物為8個高壓球形罐,內徑為了12.312m,基礎中心直徑為12.26m,每個球形罐容積為1000m3,每個球形罐由8根鋼支柱支撐,鋼支柱高度為7.8m,與罐體結合部位為50cm。實驗先利用全站儀對所有罐體的支柱實施了形變檢測,然后采用瑞士徠卡HDS三維激光掃描儀對儲氣罐支柱再次進行檢測并將實驗結果進行了對比分析。
三維激光掃描技術又稱作高清晰測量(High Definition Surveying,HDS),它是利用激光測距的原理,通過記錄被測物體表面大量的密集點的三維坐標信息和反射率信息,將各種大實體和實景的海量點云數據完整地采集到電腦中,其掃描速度可以達到50000點/秒,視場角可達270°,表面模型精度可達1mm。本文利用Leica TCA2003掃描儀掃描的海量點云數據在Cyclone軟件里進行數據預處理,實現儲配站的點云數據的匹配、建模及粗差探測。然后在Matlab平臺下編程制計算煤氣罐支柱斷面和球體的中心坐標,自動繪制出成果數據的三維圖形,為儲氣罐的安全性提供直觀可靠的科學數據。
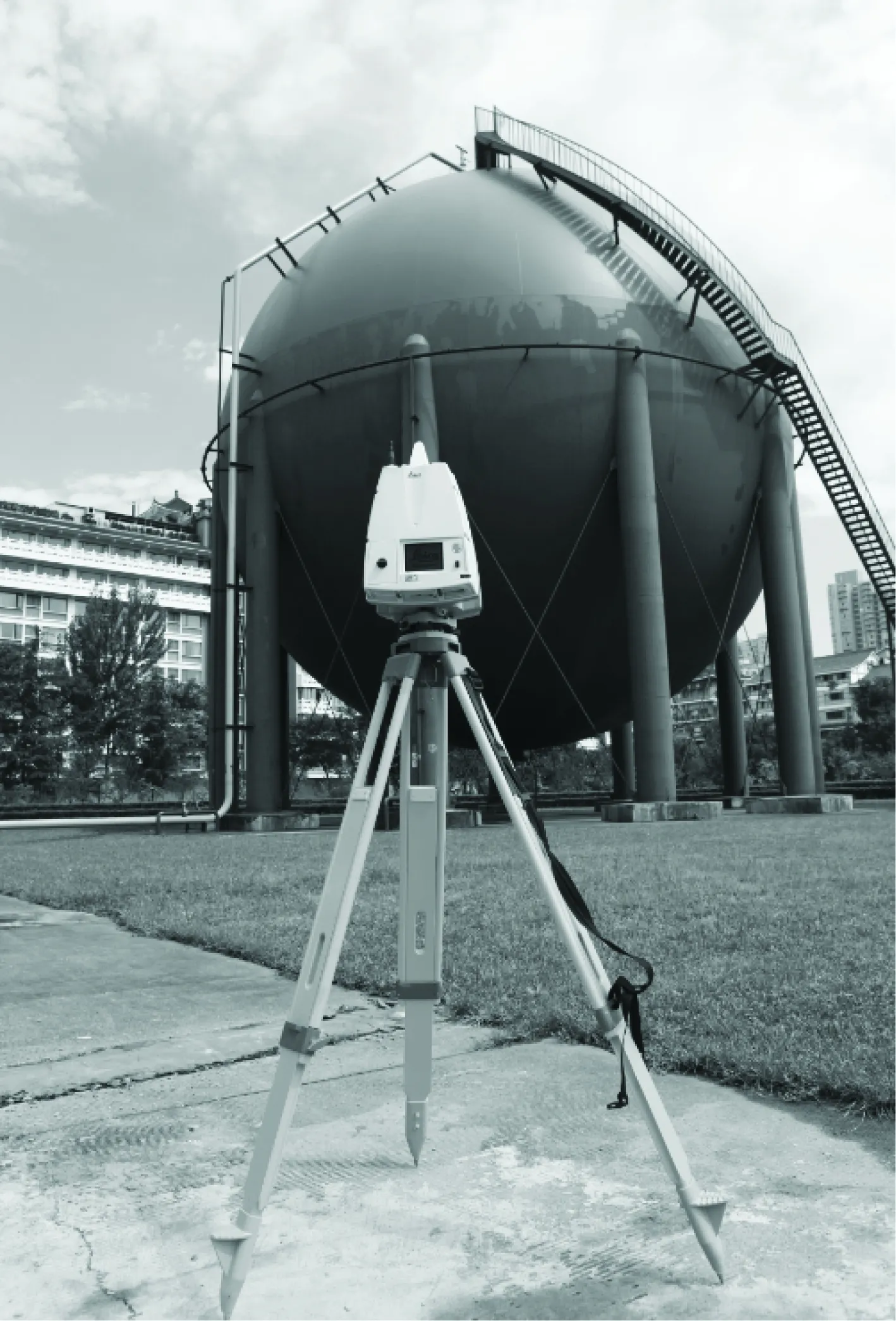
圖1 Leica三維激光掃描儀掃描儲氣罐
2 海量點云數據處理
2.1 點云數據的拼接
TCA2003精密電子掃描儀掃描的儲氣罐三維數據是以各測站的文件分別存放,需要對各測站點云數據進行拼接。由于受外界施工、光照等因素的影響,每一站的數據都會存在噪音點,所以首先通過隨機軟件Cyclone對點云數據去除噪音點。然后通過設置的站標拼接點云數據。雖然任一站掃描所得數據的內部點相對位置都是正確的,但不同站間的坐標系并不匹配。為統一坐標系,需進行多站拼接。所有數據是以每天每站的形式存儲,每一測站的數據都是一個單獨的坐標系。拼接的思路是先將每天中各測站的數據拼接成一個數據,然后拼接整體數據。圖2為第二儲配站點云數據拼接結果圖。
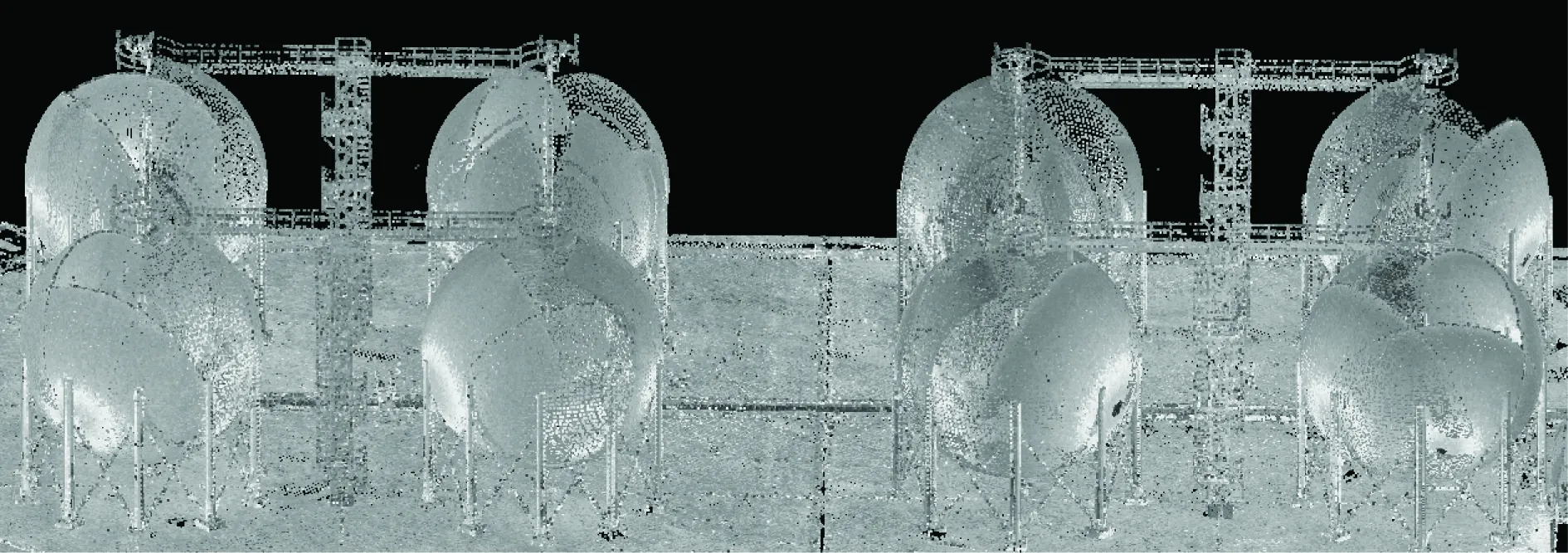
圖2 第二儲配站點云數據拼接結果
2.2 點云數據的計算
2.2.1 點云數據的提取
使用Cyclone軟件提取出每一根支柱及罐體的點云數據,分別保存成文本文件,首先要對每根支柱及罐體的數據進行殘余噪聲剔除處理,以避免像掃描的拉桿或其他遮擋物的影響。由于柱體切割時通過手工完成難免具有噪聲數據,首先根據柱體的切片數據,在程序中計算出初始圓心,在數據中設置離初始圓心的距離閥值過濾掉噪聲數據,使得參與計算的數據更加準確。圖3為噪音比較明顯的切面數據。圖4為過濾后的切面數據。
圖3 篩選前點云數據的平面投影
圖4 篩選后點云數據的平面投影

圖5 分割柱體離散點擬合圓示意圖
2.2.2 支柱切片擬合圓計算
根據柱體和球體離散點Z的坐標每隔0.1m切出每個柱體在XY坐標中的投影離散點,如圖5所示。通過分離出的離散點在程序中通過對柱體漸進循環擬合算法得出圓柱切面圓和圓心坐標和半徑。并以圓心槽坐標x、圓心縱坐標y、半徑z、高程的格式寫入文本文件。
根據海量的點云數據投影到水平面的離散點數據集中擬合出最佳圓,首先需要構造一個解析函數使得在原離散點上盡可能接近給定的值。程序的算法不僅要考慮擬合圓的精度也要考慮算法的運算速度。我們選擇Taubin method,該算法由G.Taubin于1991年提出。該程序屬于強健和精確圓擬合,即使數據點只是很小圓弧范圍內,也能擬合令人滿意的結果。這種算法的穩定性和效率都有讓人滿意的結果。該方法的步驟為:
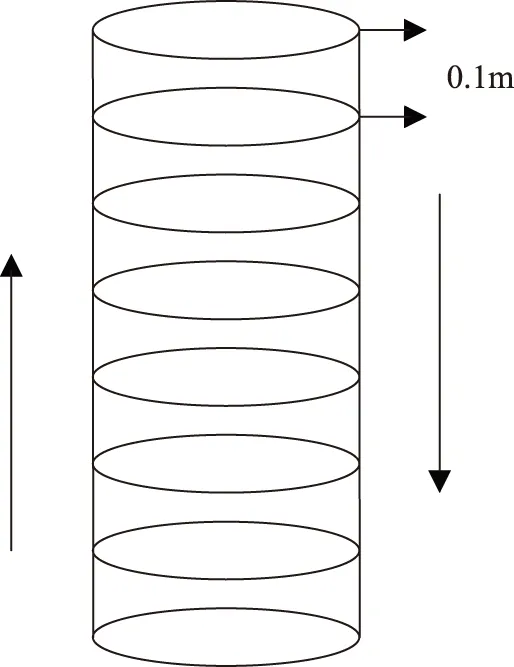
圖6 分割柱體離散點擬合圓示意圖
①定義一個以圓心橫坐標、圓心縱坐標和半徑為變量的測度函數;
②將已知樣點的橫坐標的平均值、縱坐標的平均值分別作為圓心橫坐標、圓心縱坐標的初始值,將半徑的初始值取為零;
③分別求取測度函數的梯度和hessian矩陣,然后利用測度函數的梯度和hessian矩陣求取更新步長;
④利用更新步長對圓心橫坐標、圓心縱坐標和半徑的取值進行更新;
⑤設定一個閾值,當更新步長大于該閾值時,返回步驟3;當更新步長小于等于該閾值時,則結束圓擬合過程;最后更新得到的圓心橫坐標、圓心縱坐標和半徑的取值即為圓擬合過程的最終結果。
2.3 罐體支柱計算結果的變形分析
2.3.1 支柱變形數據繪圖直觀表示
通過上述擬合計算的結果,利用Matlab的繪圖功能實現批量繪制支柱的三維視圖、支柱中心的俯視圖及三維視圖。通過對變形值的放大,可以直觀的看出每根支柱的變形量。以4號罐4號支柱為例,圖7、圖8、圖9為罐體支柱變形視圖。
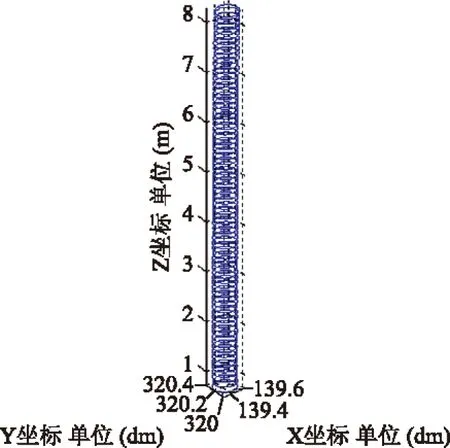
圖7 2儲4號罐4號支柱三維視圖
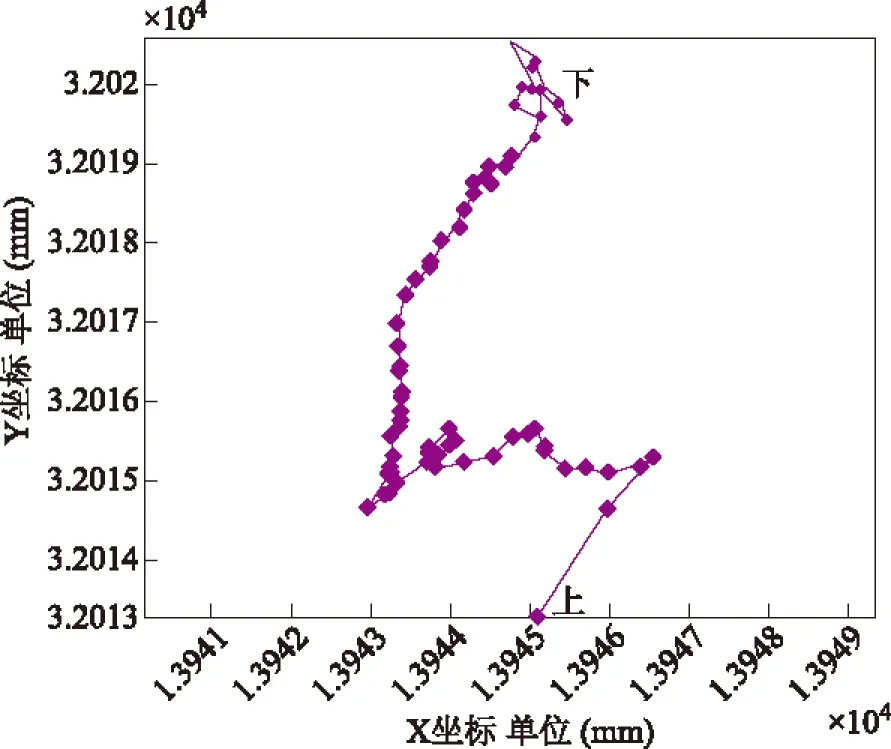
圖8 2儲4號罐4號支柱中心俯視圖
圖9 2儲4號罐4號支柱中心三維視圖
通過分析可知,圖7可以直觀地看出支柱的變形狀況,其中2儲4號罐4號支柱整體變形較小、沒有明顯的彎曲;圖8可以看出支柱在橫坐標和縱坐標兩個方向上的變化均不超過4mm和7mm;圖9和圖7一致,是支柱中心坐標的變化,可以看出支柱在頂部8m左右的變形量相對較大。
2.3.2 支柱變形切向分量及徑向分量的計算
點云數據及支柱切片圓數據均是基于空間直角坐標系的,根據測量規范,需在切向及徑向兩個方向上表現支柱的變形狀況。需對不同高度上的每個切片圓數據進行仿射變換。原理如下:

(1)
式中,(X,Y)為支柱變形切向分量及徑向分量,(x,y)為支柱變形量的直角坐標。Δx、Δy、θ、m分別為平面上的平移、旋轉、尺度參數。對于本工程,Δx、Δy為支柱高度1m以下切片圓中心平均坐標,其余計算的所有周向分量及徑向分量均是以這個平均坐標作為參考,其數據表明了各罐體支柱的變化量,即支柱的傾斜狀況和直線度。θ可以通過罐體中心與切片圓中心連線的方位角計算得到。尺度變換參數m為1。通過Matlab編程實現了支柱變形切向分量及徑向分量的計算(圖10)。
圖10 支柱變形周向分量及徑向分量計算示意圖
3 結束語
本文將徠卡三維激光掃描儀應用到儲氣罐支柱的變形監測中,利用Matlab軟件實現了海量點云數據的自動提取與計算的方法。得出了儲氣罐的支柱垂直度、直線度、周向變形量、徑向變形量,計算結果與實際測量結果相符,計算結果準確可靠。利用這種技術能夠有效的提高儲氣罐變形監測的效率,降低成本,并且能夠得出豐富的可視化成果,為儲氣罐的安全性提供準確有效的科學數據。
參考文獻:
[1] 牟學軍,李春玉.低壓濕式儲氣罐變形研究[J].遼寧化工,1997,3(2):25-25.
[2] 龍璽,鐘約先,李仁舉,等.結構光三維掃描測量的三維拼接技術[J].清華大學學報,2002,4(6):447-480.
[3] 張志涌,楊祖櫻.Matlab教程[M].北京:北京航空航天大學出版社,2010.
[4] 張新長,馬林兵,張青年.地理信息系統數據庫[M].北京:科學出版社,2005.
[5] 劉春,陸春.三維激光掃描數據的壓縮與地形采樣[J].遙感信息.2005,2(2):6-10.
[6] VALKENBURG R J,MCIVOR A M.Accurate 3-D measurement using a structured light system[J].Image and Vision Computing,1998,16(2):99-110.
[7] 馬頌德,張正友.計算機視覺計算理論與算法基礎[M].北京:科學出版社,2003.
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36