無人機全天時航空成像偵察系統(tǒng)建模與仿真
2014-08-05 02:41:26周錦春李耀軍趙春暉
計算機工程與應(yīng)用 2014年24期
周錦春,李耀軍,趙春暉
1.萍鄉(xiāng)學(xué)院,江西 萍鄉(xiāng) 337000
2.西安電子工程研究所,西安 710100
3.西北工業(yè)大學(xué) 自動化學(xué)院,西安 710072
無人機全天時航空成像偵察系統(tǒng)建模與仿真
周錦春1,李耀軍2,趙春暉3
1.萍鄉(xiāng)學(xué)院,江西 萍鄉(xiāng) 337000
2.西安電子工程研究所,西安 710100
3.西北工業(yè)大學(xué) 自動化學(xué)院,西安 710072
1 引言
航空偵察作為軍事偵察的重要組成部分之一,既是獲取戰(zhàn)術(shù)情報的基本手段,也是其獲取戰(zhàn)略情報的重要途徑[1-2]。目前,航空偵察平臺主要有無人駕駛偵察機、有人駕駛偵察機、偵察直升機和預(yù)警機等[3],各軍事大國均不遺余力地在航空相機設(shè)備研制、成像仿真等方面開展大量研究,并在現(xiàn)代戰(zhàn)爭中不斷摸索和改進。
航空相機成像仿真是相機裝備預(yù)研、改進相機設(shè)計、優(yōu)化相機性能重要途徑之一。通過系統(tǒng)仿真,研制人員可以方便快捷地得到不同參數(shù)配置、不同使用環(huán)境條件下的設(shè)計結(jié)果,能在相機投產(chǎn)前對其整體性能進行預(yù)估,以確定系統(tǒng)的成像品質(zhì)是否滿足要求、系統(tǒng)是否優(yōu)化,及早發(fā)現(xiàn)設(shè)計中存在的不足,減少了設(shè)計反復(fù),縮短了研制周期,降低了研制成本[4-5]。
本文旨在探索并研究無人機航空成像偵察的關(guān)鍵技術(shù),構(gòu)建全天時可見光航空成像偵察系統(tǒng)模型(包括無人機數(shù)學(xué)模型、相機成像幾何模型和大氣輻射傳輸模型等),可模擬完成大部分的航空成像偵察任務(wù)。同時,仿真成像結(jié)果可進行圖像處理、成像偵察等相關(guān)算法的驗證、評估與改進。
2 航空成像偵察系統(tǒng)功能與設(shè)計
2.1 仿真目標
無人機全天時可見光航空成像偵察系統(tǒng)采用模塊化設(shè)計方法,使用無人機數(shù)學(xué)模型、相機成像幾何模型和大氣輻射傳輸模型實現(xiàn)對可見光航空相機的主要功能和成像過程的仿真,具體仿真目標如下:
(1)能夠反映焦距、相對孔徑、視場角等工作參數(shù)變化對成像結(jié)果的影響;
(2)能夠反映無人機位置、速度、姿態(tài)角等參數(shù)變化對成像仿真結(jié)果的影響;
(3)能夠反映大氣能見度、景物光照度、太陽高度角等大氣環(huán)境參數(shù)對成像結(jié)果的影響。
2.2 功能模塊
本仿真系統(tǒng)主要包括以下六個模塊。
(1)仿真參數(shù)初始化
本模塊具備查詢其他仿真成員,訂購可見光航空相機模型仿真運行所需的參數(shù)表,例如圖像數(shù)據(jù)、搭載平臺參數(shù)和相關(guān)大氣環(huán)境參數(shù)等,同時可與其他仿真成員交互仿真控制命令。
(2)數(shù)字地圖加載
本模塊可從仿真參數(shù)初始化模塊獲取參數(shù)表,并可加載觀測區(qū)域高分辨率正射影像圖和數(shù)字高程模型圖,作為相機仿真模型的公共圖像數(shù)據(jù)源。
(3)相機成像仿真
該模塊可從仿真參數(shù)初始化模塊獲取參數(shù)表,從數(shù)字地圖加載模塊獲取公共圖像數(shù)據(jù)源,并能對可見光航空相機模型參數(shù)(焦距、相對孔徑、視場角等),通過仿真計算,反映出相機模型參數(shù)變化對仿真成像結(jié)果的影響。
(4)大氣輻射傳輸仿真
該模塊可從仿真參數(shù)初始化模塊獲取參數(shù)表,從數(shù)字地圖加載模塊獲取公共圖像數(shù)據(jù)源,并能對大氣環(huán)境參數(shù)(大氣能見度、景物光照度、太陽高度角等),通過仿真計算,反映出大氣環(huán)境參數(shù)變化對仿真成像結(jié)果的影響。
(5)無人機半物理仿真
基于VxWorks嵌入式PC104計算機,該模塊從仿真參數(shù)初始化模塊獲取參數(shù)表,從數(shù)字地圖加載模塊獲取公共圖像數(shù)據(jù)源,并能對無人機平臺參數(shù)(經(jīng)緯度、高度、速度、俯仰角、滾轉(zhuǎn)角、偏航角等),通過仿真計算,反映出搭載平臺參數(shù)變化對仿真成像結(jié)果的影響。
(6)仿真圖像與報告輸出
將相機參數(shù)成像模擬、大氣環(huán)境參數(shù)成像模擬和搭載平臺參數(shù)成像模擬的模擬結(jié)果進行整合,將整合后結(jié)果格式化輸出。
2.3 硬件設(shè)計
系統(tǒng)采用PC/104總線的體系結(jié)構(gòu),使用TCP/IP協(xié)議,采用套接字(socket)的消息機制進行網(wǎng)絡(luò)通信,VxWorks運行的硬件平臺是基于x86處理器的嵌入式PC104計算機,利用MATLAB的RTW和VxWorks接口實現(xiàn)的,RTW生成可以在VxWorks上運行的仿真模型實時C代碼,避免了手工編寫代碼出現(xiàn)的錯誤、大大減少了仿真軟件的開發(fā)量、縮短了無人機半物理仿真系統(tǒng)的開發(fā)周期并降低了開發(fā)成本。
主機運行MATLAB7.1和VxWorks操作系統(tǒng)的集成開發(fā)環(huán)境Tornado,VxWorks運行于目標機,兩者通過網(wǎng)絡(luò)方式連接,共同完成整個的半物理仿真實驗。仿真應(yīng)用程序開發(fā)完成后,VxWorks可脫離Tornado獨立運行,實現(xiàn)無人機半物理仿真功能。
2.4 軟件設(shè)計
無人機全天時航空成像偵察系統(tǒng)的仿真模型之間的接口關(guān)系圖如圖1所示。軟件總體設(shè)計結(jié)構(gòu)圖如圖2所示。系統(tǒng)最終將相機參數(shù)成像仿真、大氣環(huán)境參數(shù)成像仿真和搭載平臺參數(shù)成像仿真的仿真結(jié)果進行整合后格式化輸出。
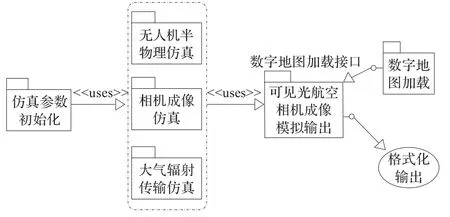
圖1 仿真模型之間的接口關(guān)系
3 航空成像偵察系統(tǒng)模型構(gòu)建
3.1 無人機數(shù)學(xué)模型
無人機數(shù)學(xué)模型[6]的建立是進行無人機半物理仿真實驗的基礎(chǔ),無人機數(shù)學(xué)模型采用牛頓定律建立六自由度的非線性全量方程。通過求出各軸的氣動力和氣動力矩系數(shù)(阻力系數(shù)cx,升力系數(shù)cv,側(cè)力系數(shù)cz,滾轉(zhuǎn)力矩系數(shù)mx,偏航力矩系數(shù)my,俯仰力矩系數(shù)mz)來
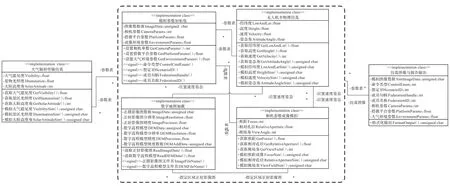
圖2 軟件總體設(shè)計結(jié)構(gòu)圖
計算作用于飛機的阻力Q、升力Y、側(cè)力C、滾轉(zhuǎn)力矩Mx、偏航力矩My、俯仰力矩Mz。

式中,q=0.5ρV2為動壓,Sw為機翼面積,L為翼展,bA為平均氣動弦長。
根據(jù)現(xiàn)場風(fēng)洞實驗提供的有限吹風(fēng)參數(shù),采用拉格朗日插值的方法解算出任意時刻的氣動系數(shù),通過基于動力學(xué)方程(無人機被看作剛體)和運動學(xué)方程(無人機被看作質(zhì)點)建立十二階微分方程組如下[7]:
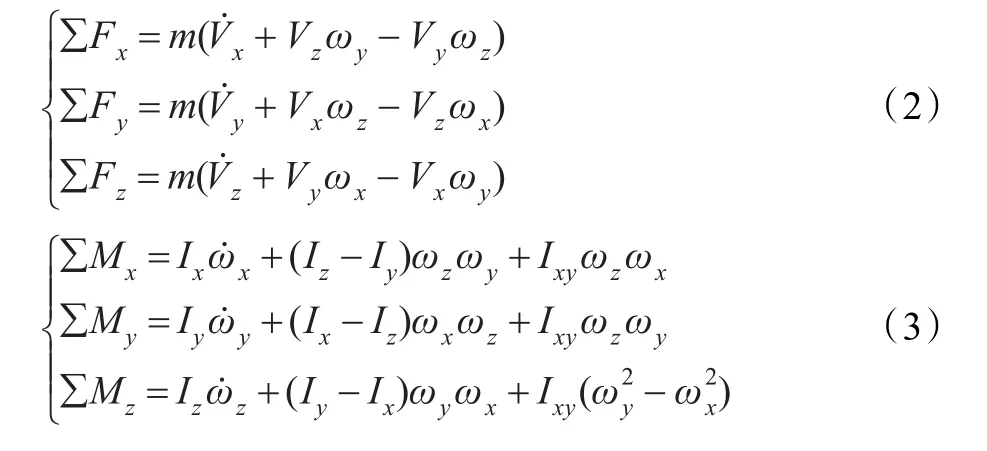
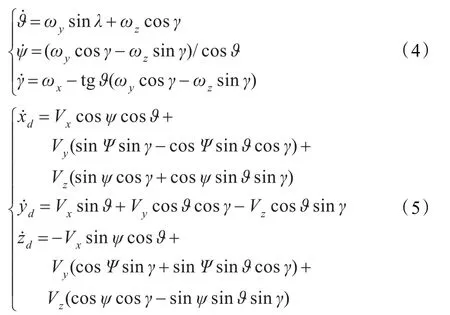
方程中∑Fx、∑Fy、∑Fz;∑Mx、∑My、∑Mz分別為力和力矩在飛機機體軸上的分量,Vx,Vy,Vz為飛機質(zhì)心速度V在機體軸系上的分量,Ix,Iy,Iz為慣性矩,Ixy為慣性積,x˙d,y˙d,z˙d為質(zhì)心對地坐標系的速度,?,ψ,γ為俯仰角,偏航角,滾轉(zhuǎn)角。ωx,ωy,ωz為飛機繞機體軸的旋轉(zhuǎn)角速度。無人機仿真模型通過解算上述的十二階微分方程組得到無人機實時的飛行姿態(tài)信息。
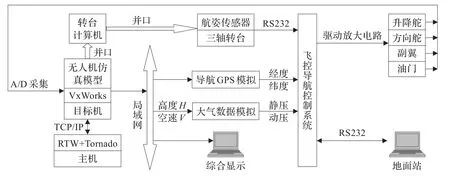
圖3 無人機半物理仿真系統(tǒng)總體結(jié)構(gòu)框圖
無人機半物理仿真系統(tǒng)總體結(jié)構(gòu)框圖如圖3所示,地面站通過RS232定時發(fā)送遙控指令至飛控/導(dǎo)航系統(tǒng),接收飛行狀態(tài)數(shù)據(jù)實現(xiàn)在電子地圖上航跡顯示、航跡規(guī)劃等。飛控/導(dǎo)航系統(tǒng)接收數(shù)據(jù)進行控制律解算,將解算出的控制信號經(jīng)過驅(qū)動放大電路驅(qū)動舵機運動,通過A/D采集輸出的舵偏角信號作無人機仿真模型的輸入信號,仿真模型仿真飛機的響應(yīng)過程進行飛機模型實時姿態(tài)信息的解算,并通過并口將解算出的滾轉(zhuǎn)角、俯仰角和偏航角發(fā)送給轉(zhuǎn)臺計算機,通過TCP/IP將空速、高度傳給大氣數(shù)據(jù)仿真系統(tǒng),轉(zhuǎn)臺計算機通過并口將姿態(tài)位置信息傳給三軸轉(zhuǎn)臺,由三軸轉(zhuǎn)臺帶動航姿傳感器運動將感知的飛機當前姿態(tài)信息通過RS232傳給飛控/導(dǎo)航系統(tǒng),大氣數(shù)據(jù)仿真系統(tǒng)來仿真提供飛機飛行中的高度和空速,給飛控/導(dǎo)航系統(tǒng)中的高度、空速傳感器提供靜壓和動壓,通過壓力計算將高度值和空速值傳給飛控/導(dǎo)航系統(tǒng)進行控制律解算,驅(qū)動舵機運動,構(gòu)成閉環(huán)無人機半物理仿真系統(tǒng)。
3.2 相機成像幾何模型
本文選用的相機模型為小孔透視模型[8-14],小孔透視模型是一種最常用的理想模型,其物理上相當于薄透鏡,它的成像關(guān)系是線性的。它不考慮透鏡的畸變,在大多數(shù)場合,這種模型可以滿足精度要求。在此模型中,定義了以下四種相互關(guān)聯(lián)的坐標系,如圖4所示。
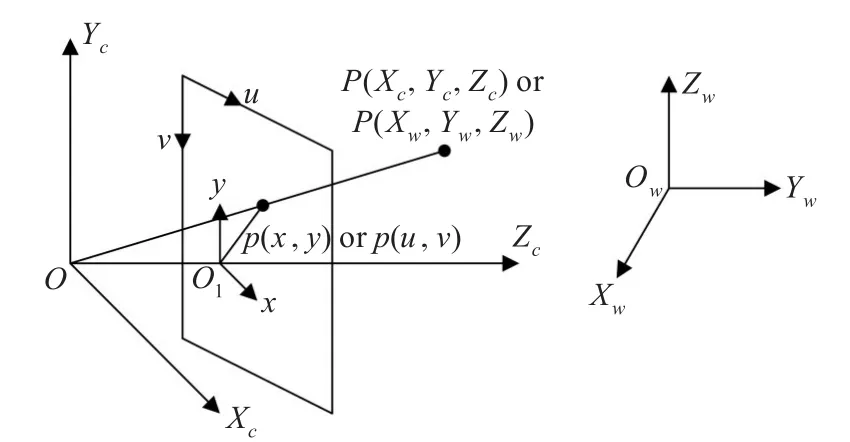
圖4 小孔相機模型
世界坐標系:坐標軸 Xw,Yw,Zw組成三維世界直角坐標系,P(Xw,Yw,Zw)表示空間物點P的世界坐標即絕對坐標。
相機坐標系:坐標軸Xc,Yc,Zc組成相機空間直角坐標系,坐標原點在o點(光學(xué)中心),Zc軸與光軸重合。P(Xc,Yc,Zc)是空間點P在相機坐標系中的三維坐標。
圖像物理坐標系:坐標軸x,y組成圖像平面直角坐標系,坐標原點o1是光軸與圖像平面的交點,x,y軸分別平行于Xc,Yc軸。P(x,y)是圖像平面上以毫米為單位圖像坐標系中的坐標。像平面與相機坐標系原點(光學(xué)中心)的距離是 f,f表示相機鏡頭的有效焦距。
圖像像素坐標系:坐標軸u,v組成像素平面直角坐標系,坐標原點在圖像的左上角,u,v軸平行于Xc,Yc軸。P(u,v)是圖像平面上以像素為單位像素坐標系中P點的最終坐標。
相機的成像過程是一個射影變換(透視或中心射影)的過程,是一個從三維空間到二維空間退化的射影變換過程。如圖4所示的小孔模型中,將三維空間中的物點投影到圖像平面上。假設(shè)其dx,dy分別為離散化像素點在軸方向上的寬度(mm/pixel),(u0,v0)為相機光軸與圖像平面的交點,即圖像中心(主點)坐標。相機坐標系與圖像坐標系之間的變換關(guān)系[15]如下:
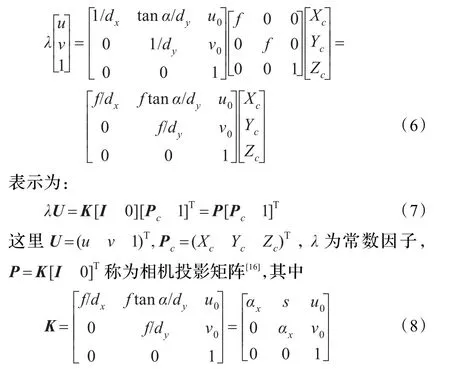
其中αx為焦距 f與像素點在u方向?qū)挾鹊谋戎担羪為焦距 f與像素點在v方向?qū)挾鹊谋戎担处義,αy分別稱為u軸與v軸方向的尺度因子。(u0,v0)為光軸與圖像平面交點像素坐標,即主點坐標。s稱為畸變因子。K完全由αx,αy,u0,v0決定,由于它們只與相機內(nèi)部結(jié)構(gòu)有關(guān),稱這些參數(shù)為相機內(nèi)參數(shù),矩陣K稱為相機內(nèi)參數(shù)矩陣。當此像素點是矩形時,則α=0?s=0,K完全由αx,αy,u0,v0四個相機內(nèi)參數(shù)決定,通常稱它為四參數(shù)模型。當像素點不是矩形時,即考慮成像畸變效果,則 s將不為0,K完全由αx,αy,s,u0,v0五個相機內(nèi)參數(shù)決定,即五參數(shù)模型。基于相機成像幾何模型[13],航空相機影像仿真論證參數(shù)詳見文獻[17]。
3.3 大氣輻射傳輸模型
大氣能見度、景物光照度、太陽高度角等與輻射圖像灰度強度關(guān)系密切,簡言之,大氣能見度越遠、景物光照度越大、太陽高度角越高,則圖像灰度強度也越大。上述因素的影響效果均與大氣輻射傳輸模型有關(guān)。光譜輻射在大氣中傳輸時產(chǎn)生折射、吸收和散射等物理過程,從而導(dǎo)致輻射衰減。大氣衰減量與輻射波長、光程長度及大氣物理特性等因素有關(guān)。大氣總是處于不斷變化中,很多參量難以精確測定,考慮對成像影響的大氣效應(yīng)則更難,因為自然環(huán)境下的成像不僅取決于大氣透射率,而且取決于大氣背景輻射、大氣湍流以及氣溶膠的多次前向散射效應(yīng),還與大氣溫度梯度場、飛行器周圍的空氣動力學(xué)流場等因素有關(guān)。目前大部分是用經(jīng)驗公式或半經(jīng)驗公式來近似計算大氣傳輸特性。采用美國空軍地球物理實驗室的LOWTRAN 7大氣傳輸/輻射計算軟件,該軟件可以計算近紫外到毫米波波段在不同大氣和氣象條件下的傳輸特性。借此模擬大部分典型氣象條件下的大氣傳輸特性,建立不同的氣象模型。
目標表面發(fā)出的光譜輻射,在大氣環(huán)境中傳輸,經(jīng)歷了大氣分子、氣溶膠的吸收和散射,則特定波段內(nèi)目標表面發(fā)射的輻射強度為E0,經(jīng)歷路徑L到達探測目標時的輻射強度衰減為[18]:
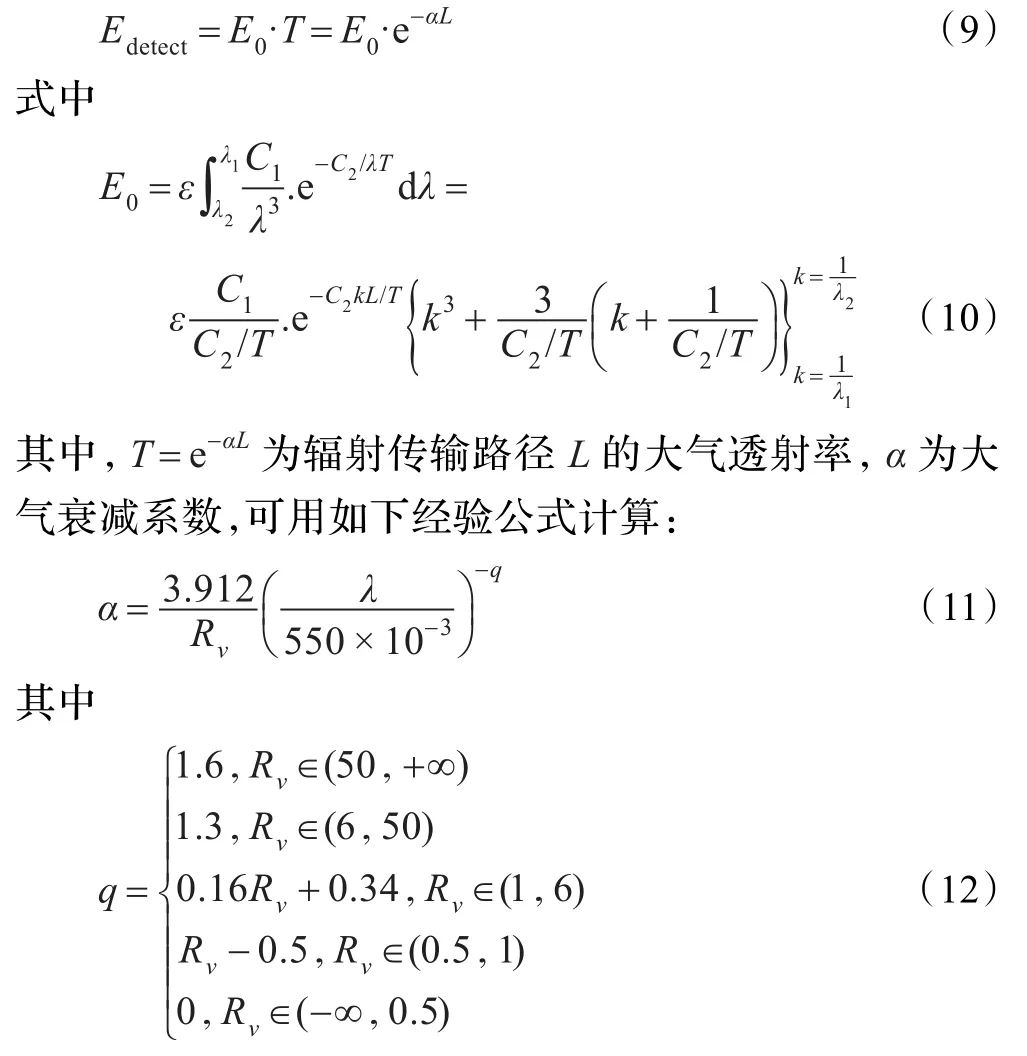
式中Rv為大氣能見度,單位為km;λ為激光波長,單位為μm。
至此,Edetect可以通過公式(9)~(12)計算出來。但是,目標表面的輻射強度 Edetect受到多種因素的影響,如周圍環(huán)境的輻射強度 Eambient、太陽/月亮的輻射強度Edirect、黑體表面的輻射強度 Ethermal以及場景中心的輻射強度Epath等,其最終輻射強度是上述多種因素影響效果的疊加,因此,探測到地面目標的實際輻射強度可表示為[18]:
其中,Edetect是到達探測器的輻射強度,Eambient是周圍環(huán)境的輻射強度,Edirect是太陽/月亮的輻射強度,Ethermal是黑體表面輻射強度;Epath是場景中心的輻射強度,Tpath是場景中心瞄準線的大氣路徑傳輸,R是材料表面反射系數(shù);C是曲面法線和太陽/月亮夾角的余弦值(如果小于0,則設(shè)置為0);F是太陽/月亮部分的鏡面反射輻射率;norm是鏡面反射標準化因數(shù);f是依賴于鏡面組成的反射角。
考慮到大氣分布的起伏和大氣湍流的擾動效應(yīng),設(shè)在探測波段內(nèi)零視距輻射圖像中最高和最低輻射強度為Emax和Emin,則路徑輻射在最終輻射圖像中引起的強度變化為:

式中Randn(x,y)為圖像平面的正態(tài)分布隨機函數(shù),β為噪聲幅度系數(shù)。因此,考慮大氣衰減、路徑輻射及系統(tǒng)噪聲擾動后,最終的輻射圖像灰度強度分布為:
為零視距圖像的灰度強度分布,式中r是常量,且r∈[0,1)。
4 航空成像偵察系統(tǒng)仿真實驗
該仿真系統(tǒng)基于KD-RTI分布式仿真運行支撐環(huán)境開發(fā),采用VC平臺開發(fā),符合HLA OMT規(guī)范。仿真系統(tǒng)的數(shù)據(jù)源即正射影像地圖數(shù)據(jù)由Google earth中國地圖服務(wù)器提供,數(shù)據(jù)大小約300 GB,覆蓋中國版圖,最高分辨率為0.6 m/pix。仿真系統(tǒng)采用分布式仿真,數(shù)據(jù)傳輸基于TCP/IP協(xié)議,通過發(fā)送地圖范圍及分辨率參數(shù)請求,獲取定制區(qū)域的地圖影像圖。仿真系統(tǒng)的總控基于STK(Satellite Toolkit)開發(fā),各仿真成員基于HLA OMT規(guī)范互聯(lián)互通互操作。
4.1 參數(shù)設(shè)置
無人機全天時航空成像偵察實時仿真系統(tǒng)成像參數(shù)設(shè)置內(nèi)容主要包括三個部分:(1)相機參數(shù):工作模式、焦距、快門、有效孔徑、感光度、幅面像素等;(2)飛機參數(shù):俯仰角、滾轉(zhuǎn)角、偏航角、東向速度、北向速度、天向速度、經(jīng)度、緯度、高度等;(3)大氣參數(shù):景物光照度、太陽高度角、大氣能見度等。具體設(shè)置窗體如圖5所示。

圖5 成像參數(shù)設(shè)置
4.2 仿真效果
無人機全天時航空成像偵察系統(tǒng)仿真效果如圖6至圖11內(nèi)容所示。其中參數(shù) f表示焦距(單位:mm);ISO表示感光度,EA表示有效孔徑(單位:mm);I表示景物光照度,S表示太陽高度角(單位:(°)),V表示大氣能見度(單位:km),Velocity表示飛行速度(單位:km/h);pitch、roll分別表示俯仰角與滾轉(zhuǎn)角(單位:(°))。經(jīng)驗證,該仿真系統(tǒng)成像效果逼真度較高,目前已應(yīng)用于空軍某研究所航空成像偵察演示驗證系統(tǒng)。
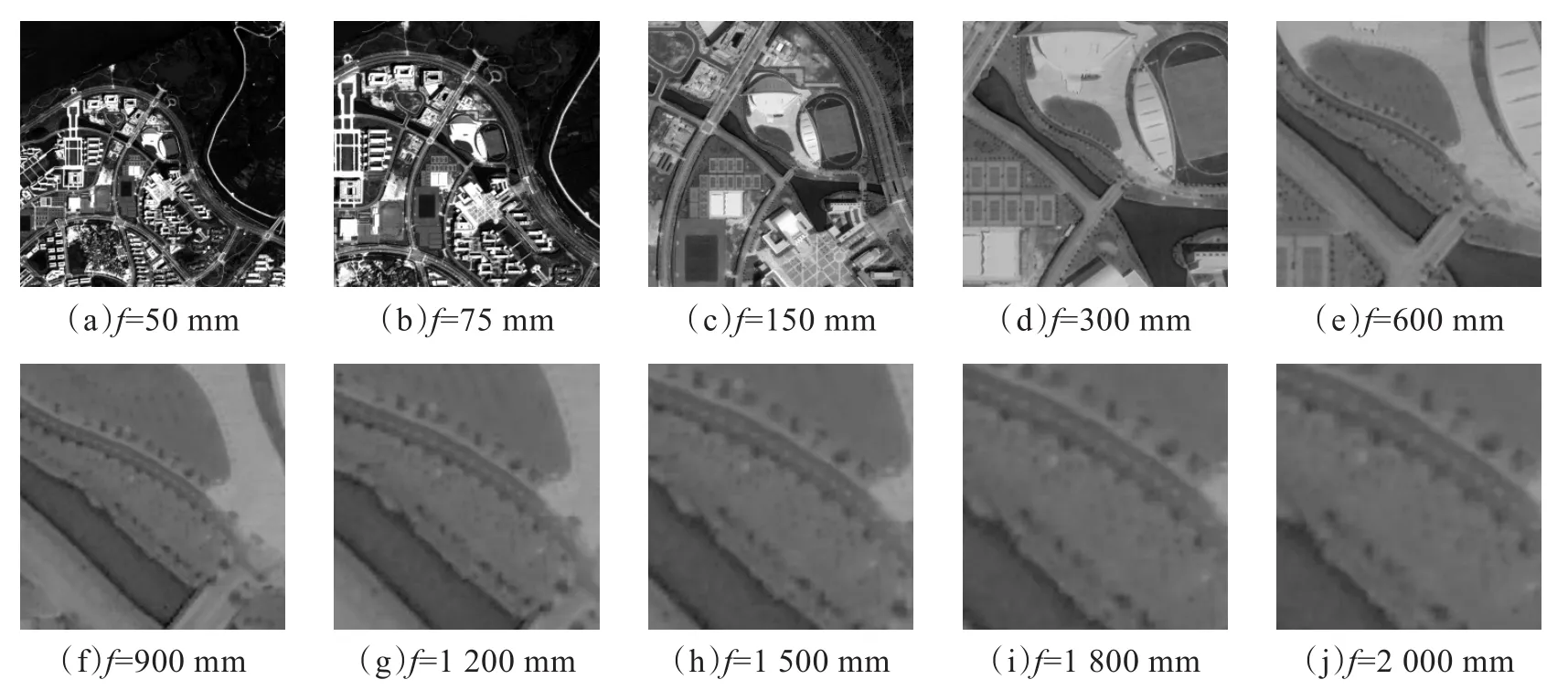
圖6 焦距f在50~2 000 mm之間變化時航空相機模擬成像的尺度效果
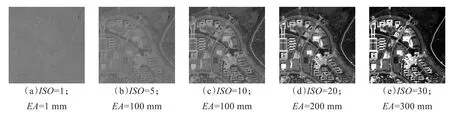
圖7 感光度ISO及有效孔徑EA變化時航空相機模擬成像的亮度和對比度效果
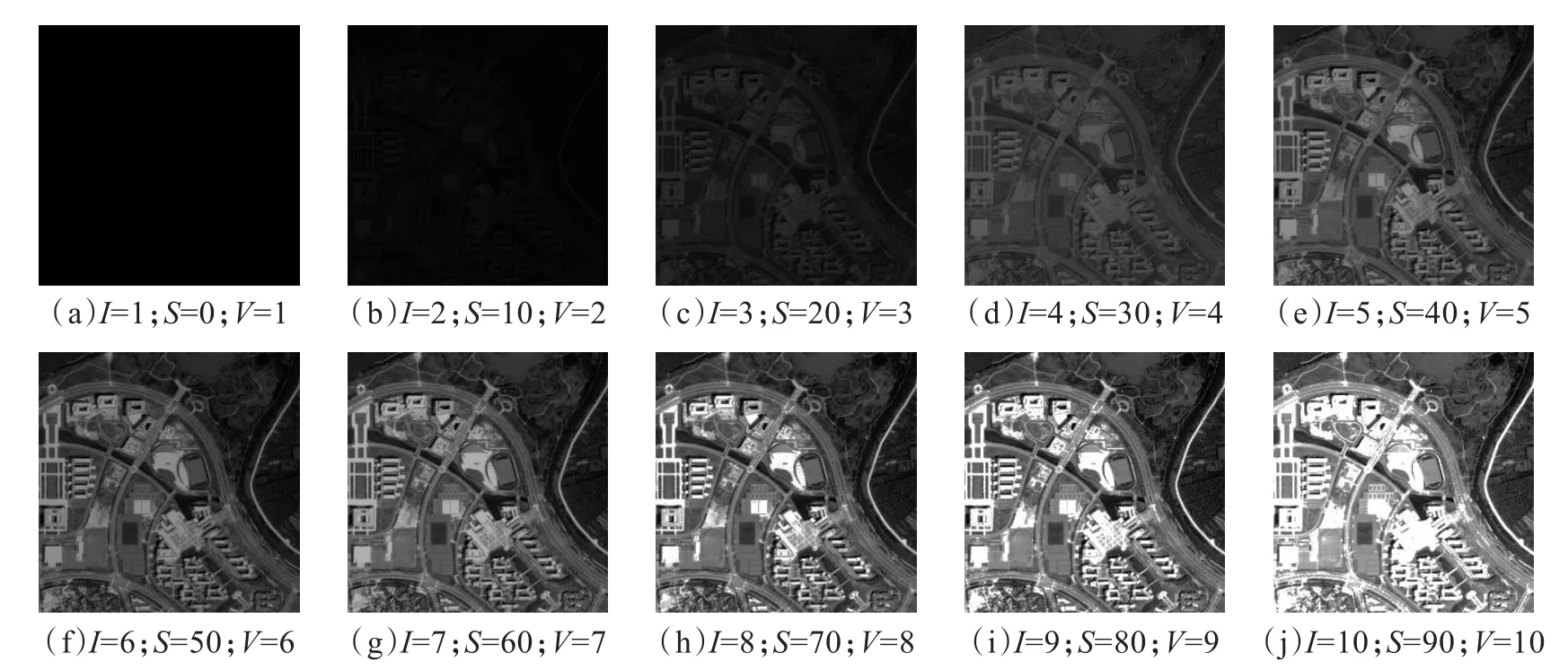
圖8 景物光照度I、太陽高度角S和大氣能見度V參數(shù)變化時航空相機模擬成像的亮度效果(單位:級、(°)、km)
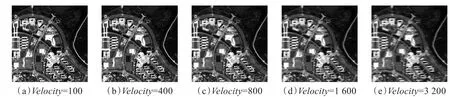
圖9 無人機飛行速度Velocity變化時航空相機模擬成像的模糊效果(單位:km·h-1)

圖10 無人機滾轉(zhuǎn)角roll變化時航空相機模擬成像的投影效果

圖11 無人機俯仰角pitch變化時航空相機模擬成像的投影效果
5 結(jié)論
本文參照無人機真實工作環(huán)境,深入研究了無人機數(shù)學(xué)模型、相機成像幾何模型和大氣輻射傳輸模型對航空相機成像偵察效果的影響,并以此為基礎(chǔ)設(shè)計了無人機全天時航空成像偵察實時系統(tǒng)。能夠反映航空相機工作參數(shù)變化對成像結(jié)果的影響;能夠反映無人機平臺參數(shù)變化對成像仿真結(jié)果的影響;能夠反映主要大氣環(huán)境參數(shù)對成像結(jié)果的影響。本仿真系統(tǒng)可實現(xiàn)參數(shù)優(yōu)化驗證實驗,對在研無人機航空相機裝備的論證與定型具有較強的驗證意義和指導(dǎo)價值。
[1]吳技.國外航空偵察系統(tǒng)的現(xiàn)狀與發(fā)展趨勢[J].電訊技術(shù),2009,46(6):107-112.
[2]喬亞.國外航空情報偵察現(xiàn)狀及技術(shù)展望[J].航空科學(xué)技術(shù),2005(2):28-31.
[3]張兵,唐文超.美國航空偵察裝備的現(xiàn)狀及發(fā)展[J].國防科技,2009,30(2):88-92.
[4]張燕燕,黃其濤.飛行仿真系統(tǒng)視景系統(tǒng)的設(shè)計與實現(xiàn)[J].系統(tǒng)仿真學(xué)報,2009(6):3662-3667.
[5]范鵬飛,范秀英,粱勇,等.基于成像過程的航空相機成像仿真系統(tǒng)[J].兵工自動化,2010,29(11):19-23.
[6]李軍偉,袁冬莉.基于VxWorks的無人機半物理仿真研究[J].測控技術(shù),2008,27(9):92-94.
[7]張明廉.飛行控制系統(tǒng)[M].北京:國防工業(yè)出版社,1984.
[8]Willson R.Modeling and calibration of automated zoom lenses[D].Department of Electrical and Computer Engineering,Carnegie Mellon University,1994.
[9]Willson R.Modeling and calibration of automated zoom lenses[C]//Proceedings of the SPIE 2350:Video Metrics III,Boston,MA,1994:170-186.
[10]Tsai R Y.A versatile camera calibration technique for high accuracy 3D machine vision metrology using off-theshelf TV cameras and lenses[J].IEEE Journal of Robotics and Automation,1987,RA-3(4):323-344.
[11]Weng J,Cohen P,Heeniou M.Camera calibration with distortion models and accuracy evaluation[J].IEEE Transactions on Pattern Analysis And Machine Intelligence,1992,14(10):965-980.
[12]章志鳴,沈元華,陳惠芬.光學(xué)[M].北京:高等教育出版社,2000.
[13]韋穗,楊尚駿,章權(quán)兵.計算機視覺中的多視圖幾何[M].胡茂林,譯.合肥:安徽大學(xué)出版社,2002.
[14]張廣軍.機器視覺[M].北京:科學(xué)出版社,2005.
[15]鄭國威.基于平面鏡的相機標定技術(shù)研究[D].西安:西北工業(yè)大學(xué),2006.
[16]Mohr R,Triggs B.Projective geometry for image analysis[R].International Society for Photogrammetry and Remote Sensing,1996.
[17]於崇真.一種高分辨率CCD陣列掃描光學(xué)系統(tǒng)[J].光子學(xué)報,1995,24(3):241-245.
[18]付強,姜會林,王小曼,等.基于MAT模塊的虛擬戰(zhàn)場大氣環(huán)境仿真[C]//系統(tǒng)仿真技術(shù)及其應(yīng)用學(xué)術(shù)會議論文集,2010.
ZHOU Jinchun1,LI Yaojun2,ZHAO Chunhui3
1.Pingxiang University,Pingxiang,Jiangxi 337000,China
2.Xi’an Electronic Engineering Research Institute,Xi’an 710100,China
3.School of Automation,Northwestern Polytechnical University,Xi’an 710072,China
Aerial imaging reconnaissance is the important means to obtain tactical intelligence.This paper designs an all-time optical aerial imaging reconnaissance system for UAV referred to various flying environment.Based on UAV(Unmanned Aerial Vehicle)mathematics model,visible camera geometry imaging model and atmospheric transmission model,the system simulates the aerial camera reconnaissance using different parameters,which are changed along with UAV motion parameters,camera imaging parameters,atmospheric transferring parameters.Numbers of test results prove that the imaging reconnaissance system has very high fidelity and validity.According to output reports,system performance can be easy to evaluate and improve.More important is that this system can help guide and demonstrate aerial imaging reconnaissance equipment for UAV.
aerial imaging reconnaissance;camera imaging model;radiation transfer model;semi-physical simulation; Unmanned Aerial Vehicle(UAV)
航空成像偵察是獲取戰(zhàn)術(shù)情報的重要途徑。設(shè)計的全天時可見光航空相機成像偵察系統(tǒng)參照無人機各種飛行環(huán)境,基于無人機數(shù)學(xué)模型、可見光相機成像幾何模型和大氣輻射傳輸模型,實現(xiàn)航空相機在無人機運動參數(shù)、航空相機參數(shù)、大氣環(huán)境參數(shù)變化情況下的成像偵察仿真。該系統(tǒng)由仿真參數(shù)初始化、數(shù)字地圖加載、相機成像仿真、大氣輻射傳輸仿真、無人機半物理仿真、圖像仿真與報告輸出六個模塊組成。通過大量實驗測試表明本系統(tǒng)模型有很高的逼真度和有效性,同時,可根據(jù)系統(tǒng)仿真報告對系統(tǒng)模型進行性能評估與改進。本系統(tǒng)的參數(shù)優(yōu)化功能可指導(dǎo)和論證無人機航空相機成像偵察裝備的研制工作。
航空成像偵察;相機成像模型;輻射傳輸模型;半物理仿真;無人機
A
TP391.9
10.3778/j.issn.1002-8331.1305-0495
ZHOU Jinchun,LI Yaojun,ZHAO Chunhui.Modeling and simulation of aerial all day imaging reconnaissance system for UAV.Computer Engineering and Applications,2014,50(24):259-265.
周錦春(1966—),男,副教授,主要從事計算機應(yīng)用與模式識別方向研究;李耀軍(1981—),男,高級工程師,主要從事組合導(dǎo)航與信息融合;趙春暉(1973—),男,副教授,主要從事無人機導(dǎo)航與信息融合。
2013-06-04
2013-08-12
1002-8331(2014)24-0259-07
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
