孤島微電網中逆變器并聯功率與電壓均衡控制技術研究
2014-08-07 12:19:30耿志清卓放寧改娣師洪濤張東翟灝
西安交通大學學報 2014年12期
關鍵詞:控制策略
耿志清,卓放,寧改娣,師洪濤,張東,翟灝
(西安交通大學電氣工程學院, 710049, 西安)
孤島微電網中逆變器并聯功率與電壓均衡控制技術研究
耿志清,卓放,寧改娣,師洪濤,張東,翟灝
(西安交通大學電氣工程學院, 710049, 西安)
針對微電網中采用傳統雙環控制的逆變器并聯系統功率均分精度較低以及輸出電壓和頻率的偏移問題,分析了并聯系統的功率均分機理及輸出電壓外特性,提出了一種基于虛擬阻抗和輸出電壓-頻率瞬時值調節的逆變器并聯運行功率與電壓均衡控制策略。在傳統的雙環控制器中增加虛擬阻抗環,改善了輸出阻抗特性,采用P-ω、Q-V下垂控制法提高了功率均分精度;同時加入輸出電壓幅值和頻率調節環,對由下垂引起的電壓、頻率的偏移進行二次調節,能保證較高的輸出電壓質量。仿真和實驗結果表明,所提出的功率與電壓均衡控制策略使孤島微網中的并聯逆變器較好地均分負載功率,同時維持輸出電壓和頻率為額定值,驗證了所提算法的有效性。
微電網;逆變器并聯;功率均分;電壓-頻率調節;均衡控制
隨著世界傳統能源逐漸枯竭,能源危機日漸嚴重,以新能源為支撐的微電網以其獨特的優勢應運而生。單臺逆變電源由于受到容量和可靠性的限制,難以滿足負載的功率需求,為了提高逆變電源容量和可靠性,微網中多采用逆變器并聯技術[1-7]。為了獲得精確的功率均分精度和保持微網電壓和頻率的穩定[5],在各分布式發電單元間設置通訊互聯線以及中央控制器,可實現對逆變器輸出電壓的控制。但是聯絡線的加入增加了成本,限制了分布式系統的距離,還會降低系統的穩定性[8-10]。無聯絡線控制技術僅需測量分布式系統的本地信號,無需通訊就能實現對電壓的控制,因而得到了廣泛應用[2,6-8]。
在無聯絡線的逆變器并聯系統中,引入電力系統中同步發電機的自下垂特性,即以各并聯逆變器輸出的有功功率和無功功率為控制變量,調整各逆變器輸出電壓的幅值和頻率,從而使得各并聯逆變器輸出電壓得以同步,最終實現消除環流均分負載的目的[8-9]。傳統的下垂控制沒有考慮電壓和頻率的恢復問題,也就是類似于傳統發電機中的二次調整問題,微電網中功率波動越大,電壓和頻率的瞬時偏差越大。基于此,有學者提出根據功率變化實時調節下垂系數,即在功率波動較大時采用較小的下垂系數來減小電壓和頻率的偏移[10]。但是,下垂系數過小會影響系統動態響應、過大則會引起系統不穩定,其取值需進行折中考慮[6]。微電網由于容量較低,一般接入到低壓配電網中[2,10-11],而低壓線路的線路電阻遠大于電抗(阻抗比可達7.33)[12],當輸出阻抗及線路阻抗之和為阻性時,P-Q解耦將受到影響,且在穩態時無功功率均分效果較差。因此,逆變器的輸出阻抗特性影響著下垂控制的效果。
文獻[10]提出通過改變控制參數來增大輸出阻抗以減小無功環流,同時根據功率波動大小實時改變下垂系數,以減小功率波動引起的電壓、頻率與額定值的偏差過大。但使用該方法時,電壓、頻率偏離額定值的情況仍存在。利用虛擬阻抗來改變輸出阻抗特性,并減小線路阻抗差異對功率均分的影響得到廣泛應用[1,3,6,8]。文獻[11]提出在低壓微電網中加入感性虛擬阻抗來減小輸出電阻對系統環流的影響,同時通過對傳統下垂控制進行改進,有效降低了線路電阻對并聯均流的影響。但是,該方法以輸出濾波電容很小為前提,當逆變器容量較大且對濾波要求較高而采用較大電容時,均流效果受到影響。采用下垂控制的逆變器在功率分配精度與電壓質量之間存在矛盾,現有的分層控制技術雖然可以在一定程度上減小電壓、頻率與額定值的偏差,但由于各分布式電源與中央控制器之間需要通信,降低了系統的可靠性[13]。
本文綜合考慮了并聯系統的功率均分機理及輸出電壓的外特性,在傳統的雙環并聯控制器中增加虛擬阻抗環,改善了輸出阻抗特性,采用P-ω、Q-V下垂控制法提高了功率均分精度。同時,加入輸出電壓幅值和頻率調節環,對由下垂引起的電壓、頻率的偏移進行二次調節,能保證較高的輸出電壓質量,實現功率與電壓的均衡控制。通過仿真和實驗驗證了該算法的有效性。
1 微電網中逆變器并聯控制策略
1.1 傳統逆變器并聯控制技術
本文以兩臺逆變器并聯等效模型(見圖1)為研究對象,對逆變器并聯時的功率均分問題進行分析。
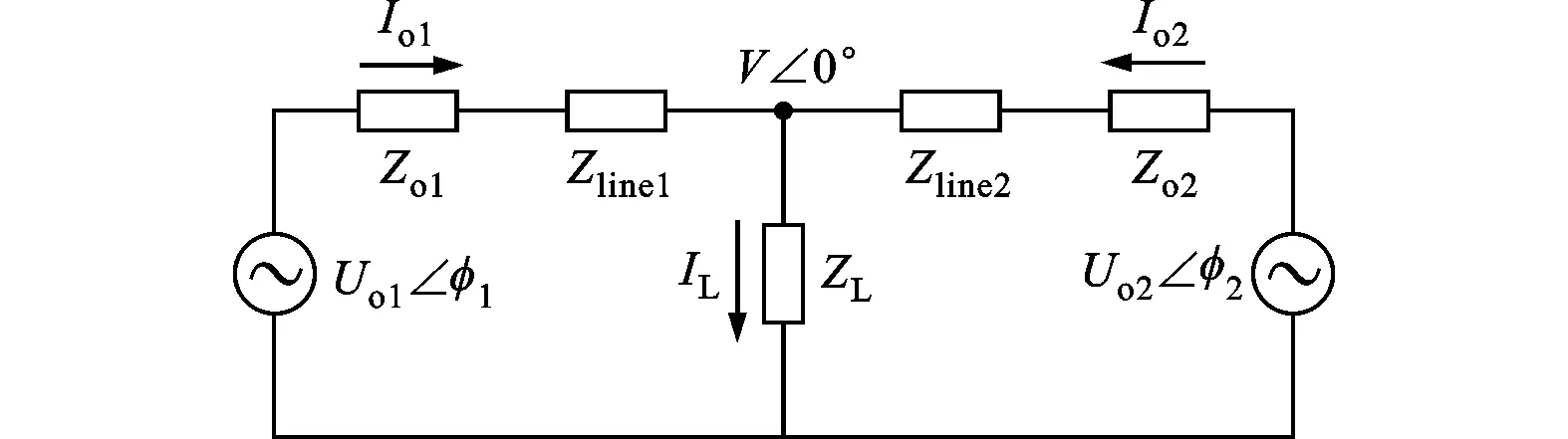
圖1 兩臺逆變器并聯等效模型
在上述模型中,定義兩臺逆變器的輸出電壓為Uoi∠φi(i=1,2),φi為輸出電壓與母線電壓的相角差;輸出電流為Ioi,逆變器輸出阻抗與線路阻抗和為Zi∠θi=Zoi+Zlinei=Ri+jXi,Zi和θi分別為其幅值和相角;負載阻抗為ZL,負載電流為IL。假設公共交流母線電壓V=V∠0°作為參考向量,由于Uoi的相角是通過鎖相環對母線電壓V鎖相得到的,因而Uoi和V的相角差很小(sinφi≈φi,cosφi≈1);當逆變器輸出阻抗與線路阻抗之和為感性時,Zi=jXi(θi=90°),逆變器的輸出有功、無功功率為[5-6]

(1)
(2)
分析式(1)、式(2)可見,有功功率Pi主要由φi決定,而無功功率Qi主要由Uoi和V的幅值差決定,因此在一定程度上,有功、無功功率可通過控制頻率和電壓來實現獨立控制,由此可得傳統的P-ω、Q-V下垂控制方程
(3)

當逆變器輸出阻抗與線路阻抗之和為阻性時,Zi=Ri,此時θi=0°,下垂控制變為P-V、Q-ω,下垂控制方程如下
(4)
當逆變器輸出阻抗與線路阻抗之和為阻感性時,且有0°<θi<90°,此時下垂控制方程為
(5)
通常,不同電壓等級的線路具有不同的阻抗比(R/X)[10],因此應綜合考慮逆變器輸出阻抗及線路參數特性,選取合適的下垂控制策略。
1.2 逆變器并聯的功率均分機理
微電網中多個并聯的逆變電源通過共同的交流母線作為其輸出的唯一連接,并聯逆變電源之間需要根據自身的輸出功率,通過合理、優化的控制方法調節各自的輸出電壓幅值、頻率和相位,從而實現各逆變單元之間負載功率的合理分配。由式(1)、式(2)可知,逆變電源的輸出功率與其輸出阻抗、線路阻抗及輸出電壓的幅值和相角差有關,當各并聯逆變器的輸出阻抗與線路阻抗都相等時,P-ω、Q-V下垂控制可實現各逆變器的功率均分。但在實際情況下,各逆變器與母線的連線阻抗存在差異,因而功率就難以嚴格均分。
由式(1)、式(2)可知,若Zi∠θi為感性,則在穩態時,有功功率與相角有關,無功功率與電壓有關,通過P-ω、Q-V下垂控制可分別調節有功、無功輸出[6-7,10-11];若Zi∠θi為阻感性,則在穩態時,有功、無功之間存在耦合,需進行解耦控制,傳統的P-ω、Q-V下垂法不再適用,同時逆變器與母線之間連線阻抗的不平衡也影響了功率的均分。因此,必須對輸出阻抗進行優化,使逆變器的等效輸出阻抗近似為感性,同時減小各并聯逆變器輸出阻抗與線路阻抗的差異,提高功率均分精度,減小系統環流。
1.3 dq坐標系下的虛擬阻抗設計
在傳統并聯控制器中加入虛擬電感,可使逆變器輸出阻抗感性增強,即R/X變小,提高了有功、無功的解耦控制精度,同時還可抑制并聯逆變器間的無功環流[3,8]。另外,虛擬電阻的加入,增加了系統的阻尼,能有效抑制系統振蕩[6]。加入虛擬阻抗后,實現了對系統等效線路阻抗的間接控制,可表示為
(6)

(7)
(8)
式中:Rvir、Lvir分別為虛擬電阻和虛擬電感;Vorefd和Vorefq為輸出電壓調整參考值的d、q分量;ω為dq坐標系的旋轉角頻率。
在dq旋轉坐標下實現虛擬阻抗如圖2所示。
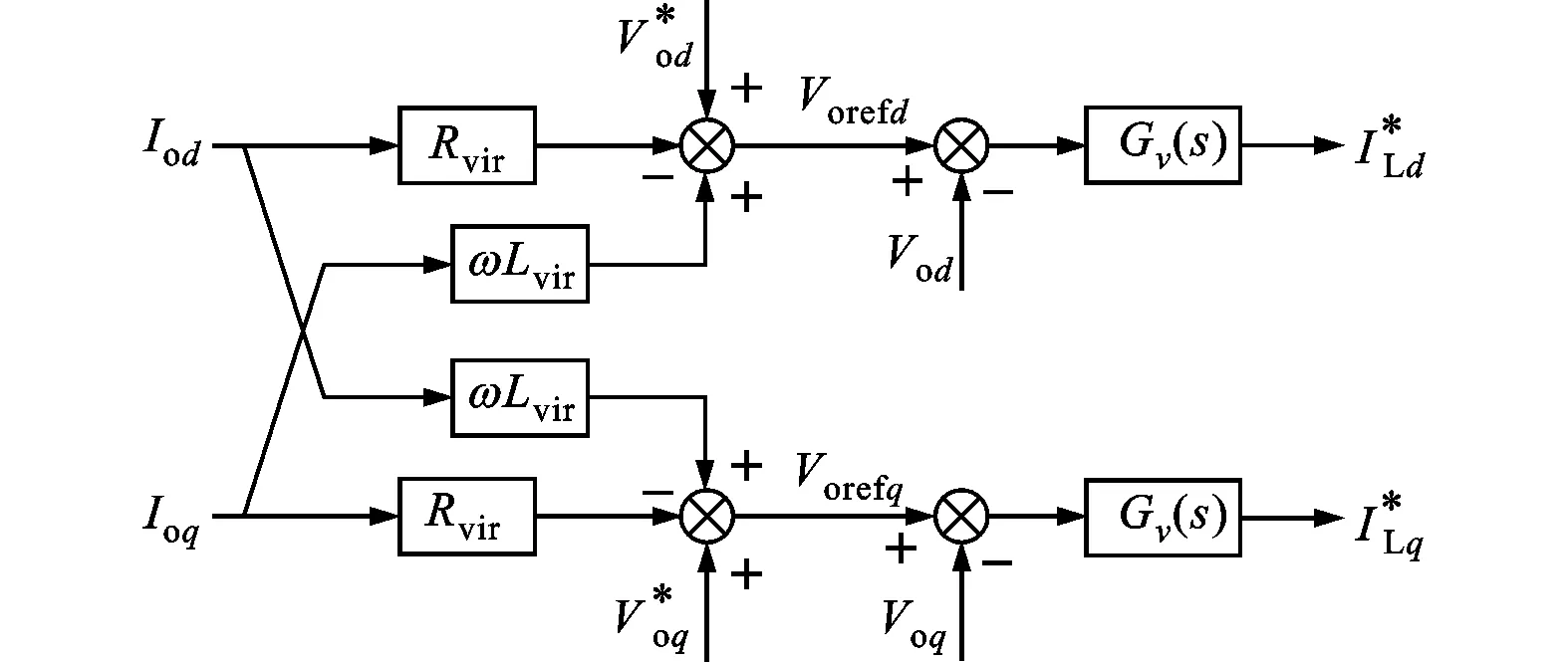
Vod、Voq分別為輸出電壓反饋值的d、q分量;Gv(s)為電壓環PI調節器的傳遞函數分別為電流環參考值的d、q分量
2 功率與電壓均衡控制策略
2.1 逆變器的輸出電壓外特性分析
圖3為加入虛擬阻抗的逆變器控制框圖,逆變器采用電壓、電流雙環控制,電壓外環采用PI調節器,其傳遞函數為Gv(s),其輸出作為電感電流內環的參考輸入,傳遞函數為Gi(s)。
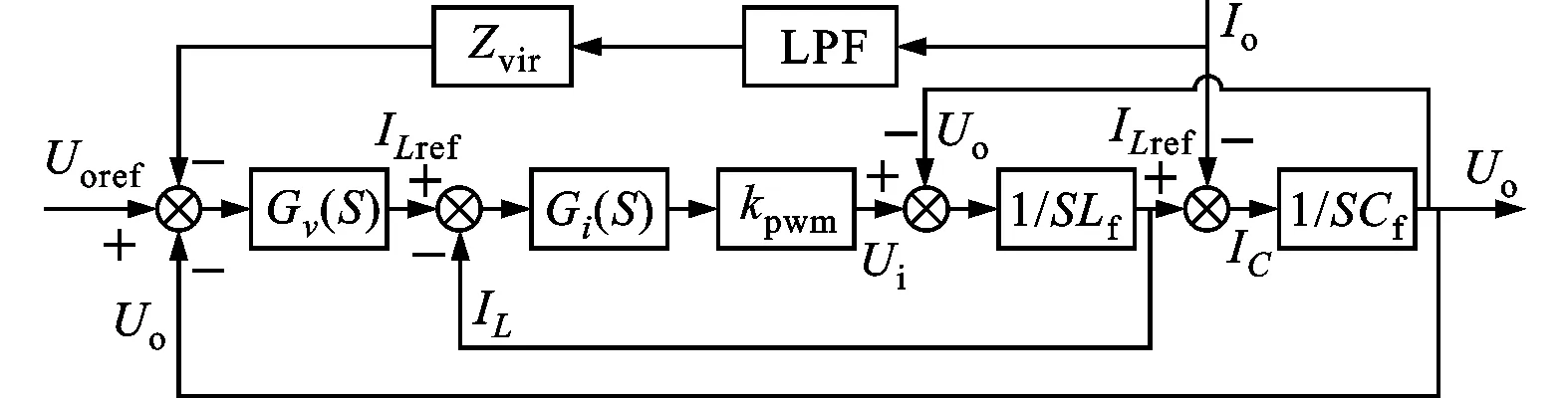
Uo為逆變器輸出電壓;Uoref為輸出電壓參考值;Lf和Cf分別為逆變器的輸出LC濾波電感和電容;kpwm為PWM環節的比例系數;IL、IC和Io分別為濾波電感電流、濾波電容電流和輸出電流
由圖3可推導出逆變器的輸出電壓為
Uo(s)=G(s)[Uoref(s)-Zvir(s)Io(s)]-Zo(s)Io(s)
(9)
式中


將式(9)整理后,得
Uo(s)=G(s)Uoref(s)-Io(s)[G(s)Zvir(s)+Zo(s)]
(10)
加入虛擬阻抗后,總的輸出阻抗為
Zovir(s)=G(s)Zvir(s)+Zo(s)
(11)

從式(9)和式(10)可以看出,逆變器的輸出電壓由兩部分決定。一是跟蹤輸入給定量的部分G(s),其性能決定了輸出量對給定量的跟蹤性能。通過分析G(s)可知,與輸出電壓成正相關的參數為逆變器增益kpwm,與輸出電壓成負相關的參數有輸出濾波電容和電感,即當輸出濾波電感和電容過大時,會導致輸出電壓嚴重偏離額定值。二是逆變器的閉環輸出阻抗Zovir(s)。采用下垂控制的逆變器,其輸出阻抗同時受到線路阻抗、輸出濾波器及控制參數的影響[4,6,8],且輸出阻抗隨濾波電感和虛擬阻抗的增加而增加,隨濾波電容的增加而減小。當逆變器的主電路及控制參數確定后,G(s)基本保持不變,Zovir(s)主要由虛擬阻抗決定,因此虛擬阻抗的加入改變了輸出阻抗的特性,使其感性增強,幅值增大,在傳統下垂控制下提高了P、Q解耦控制精度,減小了系統環流。
2.2 電壓和頻率控制策略

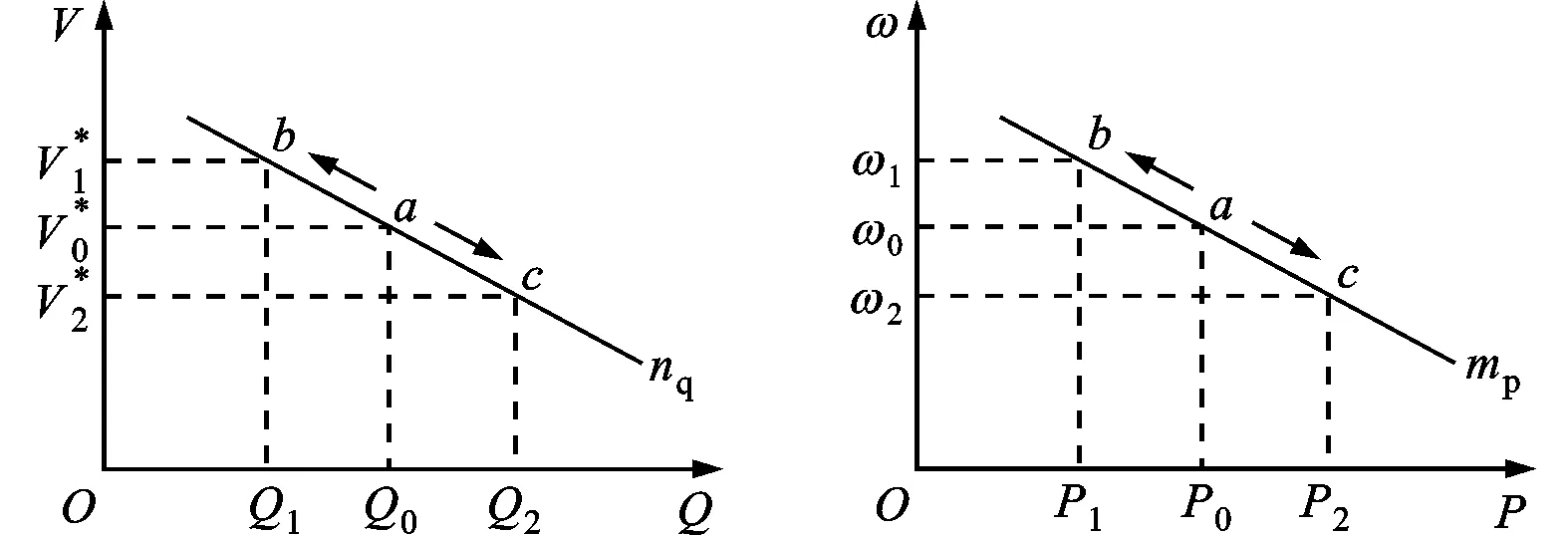
(a)Q-V (b)P-ω
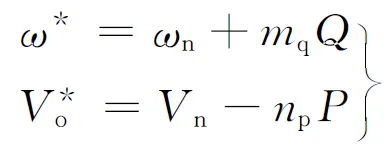
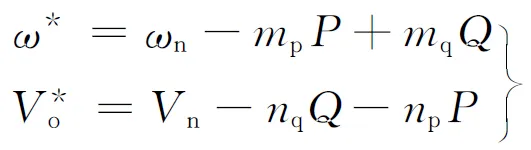
為了實現微網的基本控制目標,即保證各并聯逆變器均分負載功率且逆變器的輸出電壓幅值和頻率保持額定輸出,當功率變化引起電壓和頻率變化時,需對逆變器輸出電壓幅值和頻率進行動態調節。結合圖4和式(3)可知,要想對輸出電壓及頻率進行調節,可通過改變下垂系數或Vn、ωn來達到目的。本文提出通過改變輸出電壓額定值Vn和頻率額定值ωn來實現。即當負載功率增加(減小)引起電壓幅值和頻率降低(升高)時,可通過增加(減小)電壓和頻率的額定值來保持輸出不變,在坐標圖中表現為將原下垂曲線豎直向上或向下平移ΔVn(或Δωn),以此來補償電壓和頻率由于下垂產生的偏差,使系統達到新的穩態,如圖5所示。
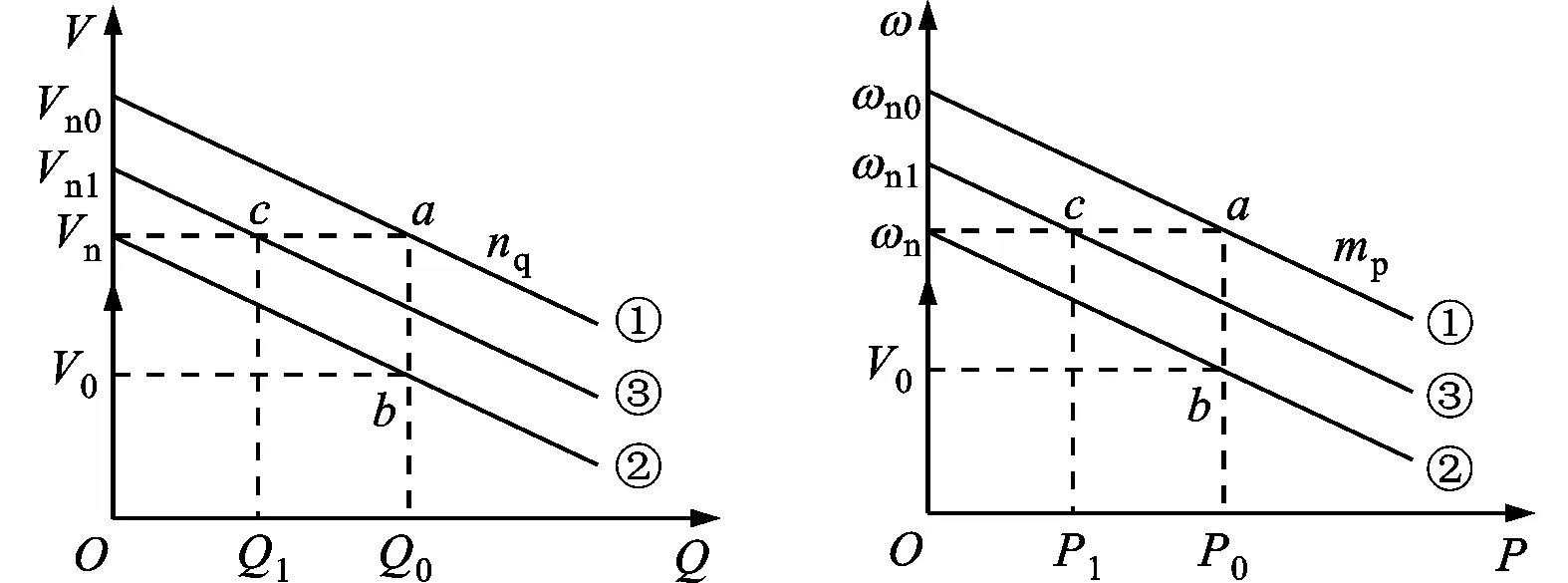
(a)Q-V (b)P-ω

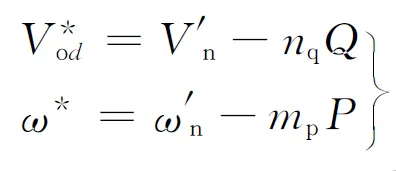
(12)
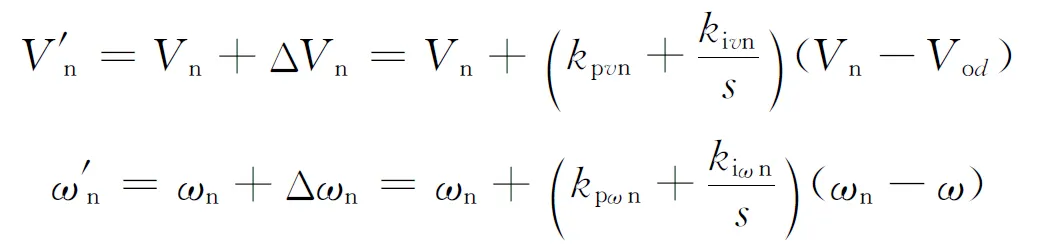

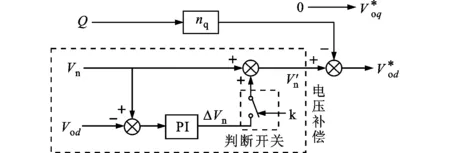
圖6 輸出電壓調節框圖
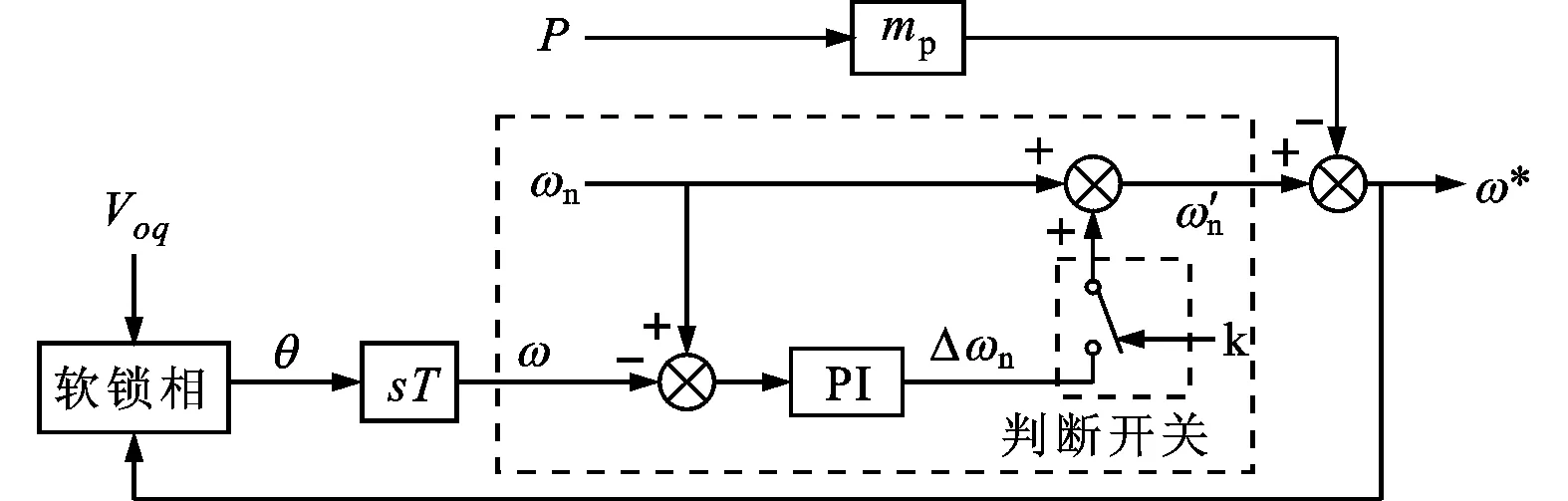
圖7 頻率調節框圖
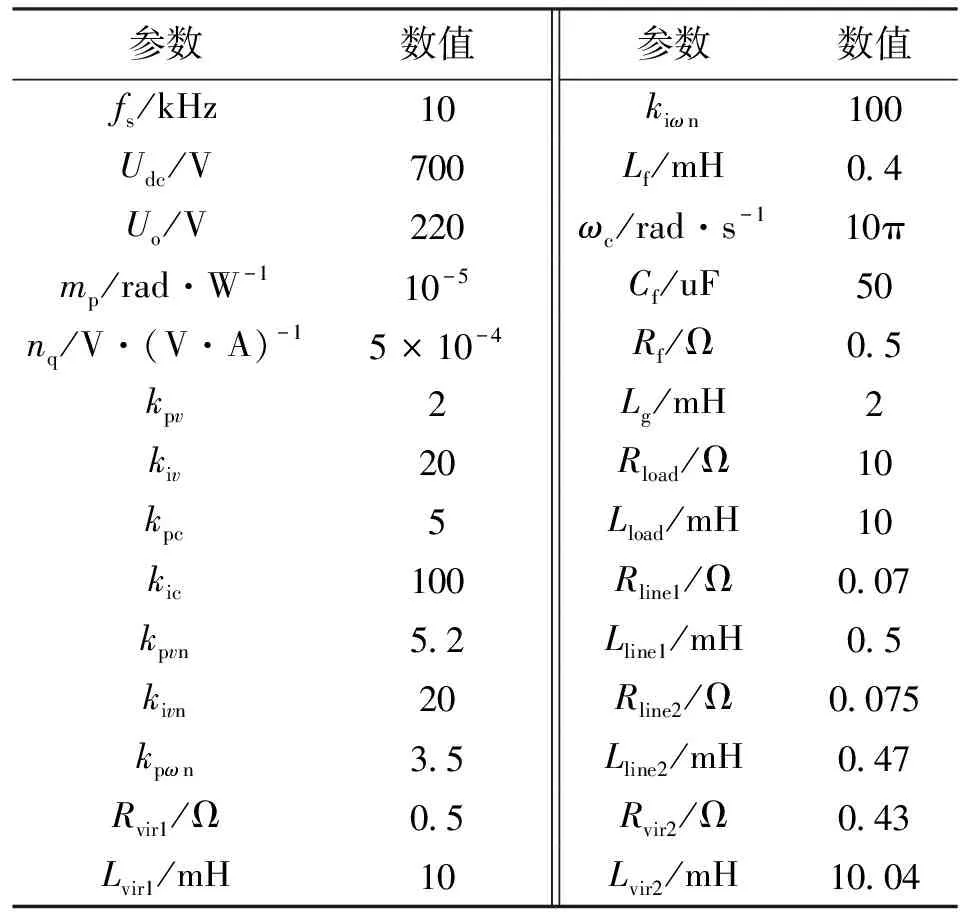
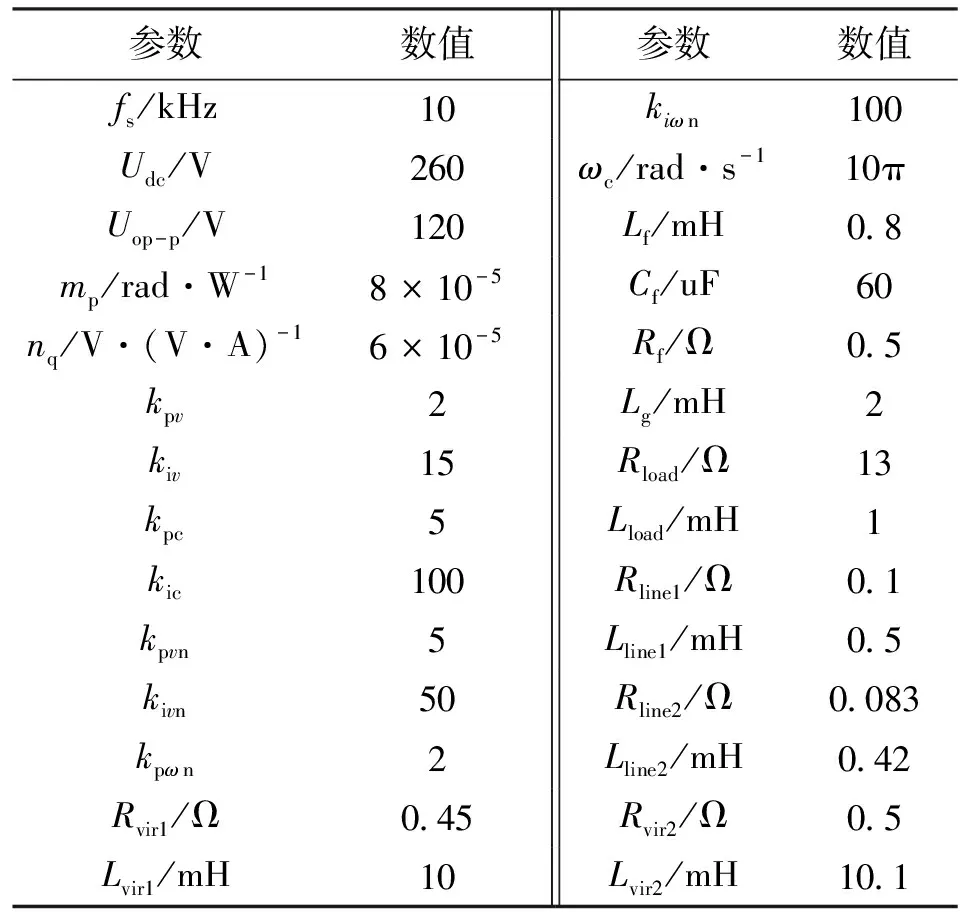
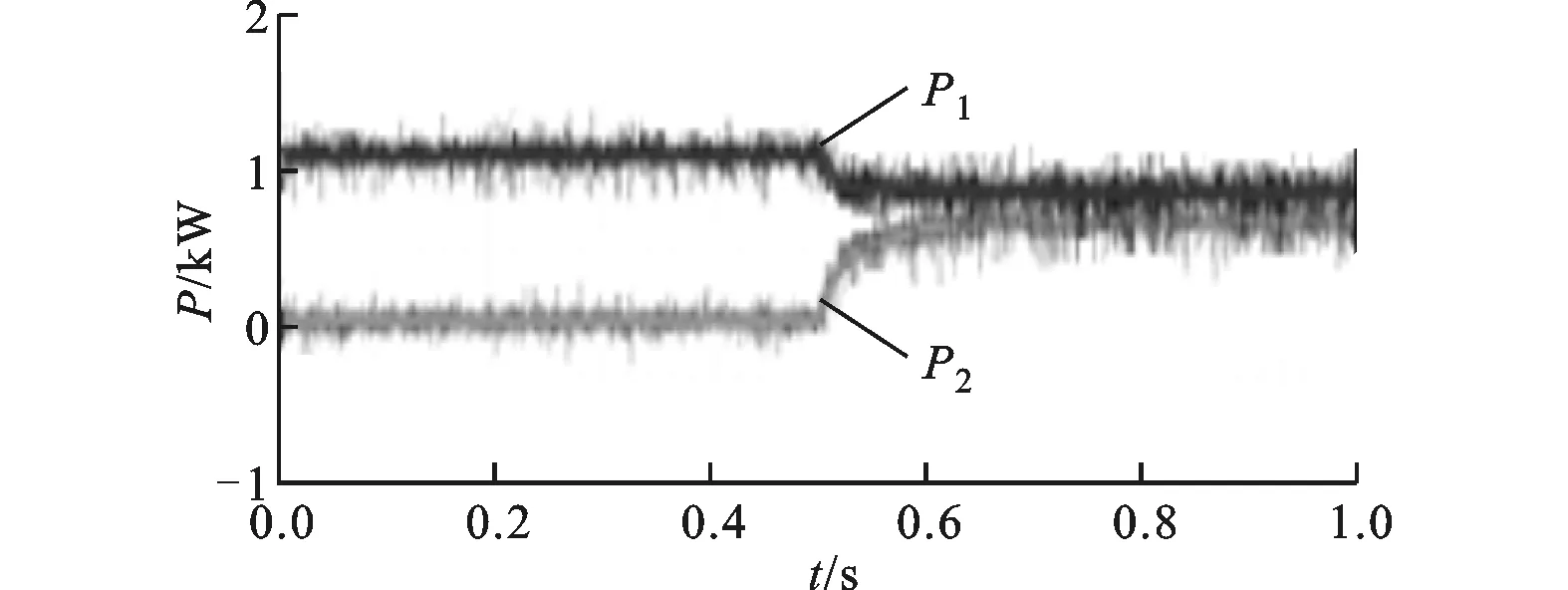
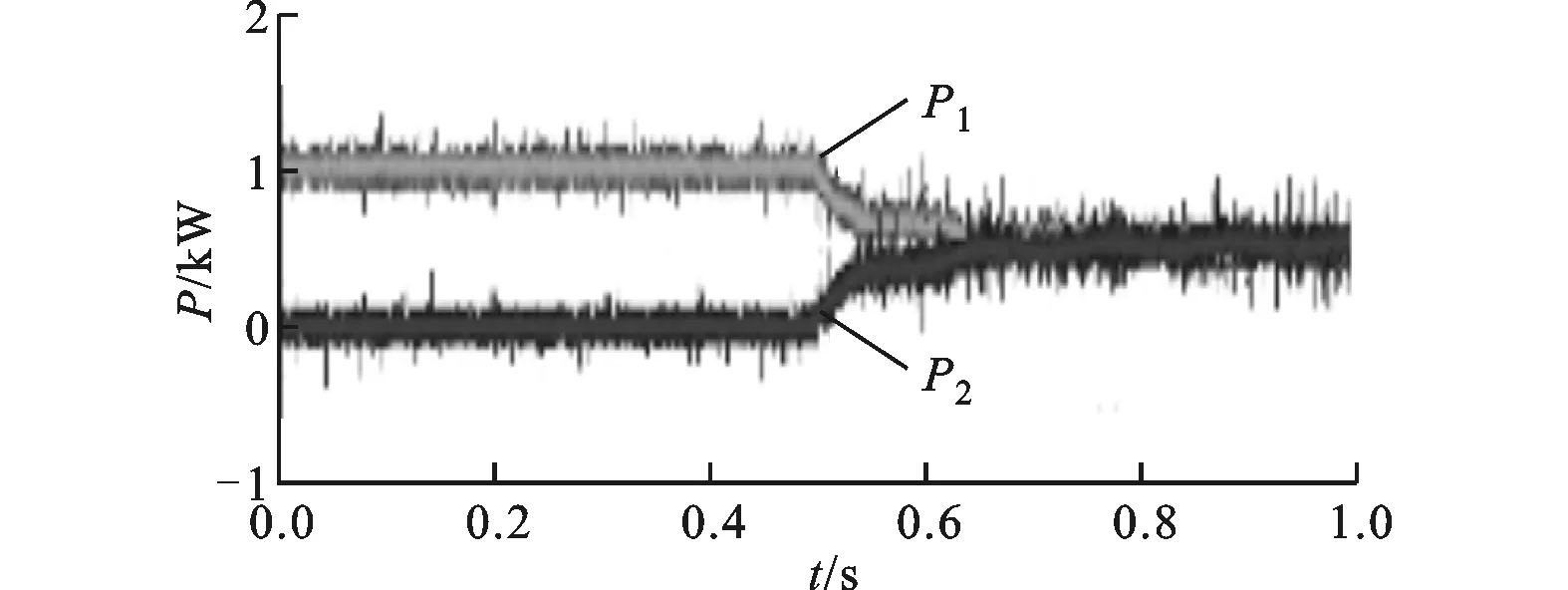
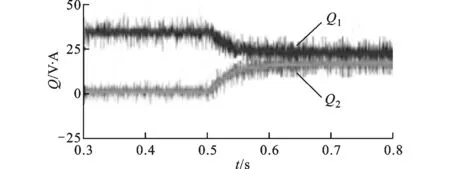
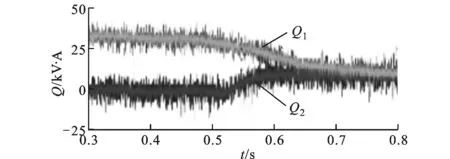
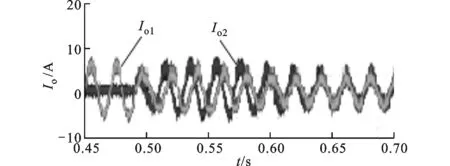
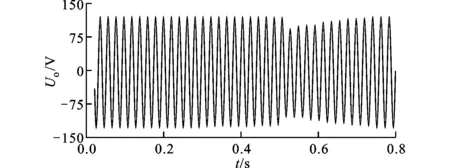
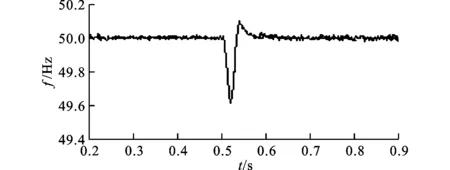
結合式(3)及圖5,由于下垂控制固有的特性,即頻率、電壓與有功、無功互相影響,當逆變器空載運行時,由于輸出功率為0,其輸出電壓和頻率均為額定值。當逆變器帶負載運行時,其實際輸出電壓和頻率將小于額定值,如圖5中,逆變器在下垂曲線②的作用下運行,工作點為b(V0,Q0),但V0 圖8 功率與電壓均衡控制流程圖 當系統檢測到逆變器輸出功率發生較大降落(第二臺逆變器投入或負載突然切除)且功率均分未完成時,令k=0,電壓和頻率的補償開關斷開,暫停對電壓和頻率的補償調節,避免下垂與補償調節產生耦合,下垂曲線回到曲線②,逆變器輸出無功從Q0逐漸減小,對應電壓從V0逐漸增大,但始終小于Vn。當系統檢測到功率均分完成后,令k=1,閉合電壓和頻率補償開關,經過微調,將Vn向上平移ΔVn1,得到下垂曲線③,系統達到穩態,工作點為c(Vn,Q1)。 由于兩臺逆變器參數相同,故其輸出電壓保持同步,都達到Vn,兩臺逆變器均分功率,均為Q1=Q0/2。系統對功率波動的監測是基于判斷dQ/dt及dP/dt的大小進行的。當另一臺逆變器切除或突增負載導致逆變器輸出功率突增時,電壓調節過程與上面相似,同樣可得相同情況下的頻率調節原理,實現流程如圖8所示。這樣,通過下垂控制與電壓和頻率補償調節的分時作用,避免了二者產生耦合,互相影響,達到了并聯系統功率合理分配和保持較高電能質量的目的。 為驗證本文采用的并聯控制算法的有效性,使用PSIM仿真軟件搭建了兩臺逆變器并聯模型,仿真模型參數設置見表1。 表1 本文模型仿真參數 仿真過程為:首先由一臺逆變器單獨帶負載運行,在0.1s時,逆變器2通過交流母線并入,兩臺逆變器并聯運行,共同提供負載功率。采用未加虛擬阻抗的傳統雙環控制策略和本文提出的控制策略進行兩次仿真,仿真結果如圖9所示。 (a)傳統控制方法下逆變器輸出的有功功率 (b)本文控制方法下逆變器輸出的有功功率 (c)傳統控制方法下逆變器輸出的無功功率 (d)本文控制方法下逆變器輸出的無功功率 (e)本文控制方法下的逆變器輸出電流 (f)本文控制方法下的逆變器輸出電壓 (g)本文控制方法下的逆變器輸出頻率 由圖9a~圖9d可知,由于兩逆變器與母線之間線路阻抗的差異,采用傳統雙環控制時逆變器有功、無功功率不能較好地均分。加入虛擬阻抗環后,逆變器輸出有功和無功功率能夠較好地均分,且動態響應快。 另外,加入本文所提的電壓和頻率補償環節后,逆變器1單獨帶負載運行時,由于下垂特性和虛擬阻抗的作用,電壓和頻率與額定值相比有較小的偏差。采用電壓和頻率調節策略,通過實時增大Vn和ωn,逆變器的輸出電壓和頻率都維持在額定值。在0.1s時,逆變器2并入,逆變器1的輸出功率迅速減小,系統快速響應,并暫停電壓和頻率的補償調節,切換到采用虛擬阻抗的P-ω、Q-V傳統下垂控制。通過分別調節電壓和頻率,有功、無功功率得到獨立控制,兩臺逆變器的輸出有功、無功功率迅速達到均分,且基本消除了系統環流。在此過程中,逆變器1的輸出電壓和頻率由于沒有了補償調節,在下垂特性的作用下,電壓和頻率都小于額定值,且隨著逆變器輸出功率的減小,電壓和頻率逐漸接近額定值。當功率均分完成后,系統重新啟動電壓幅值和頻率調節,在大約4個周期之后,兩臺逆變器的電壓幅值和頻率都恢復到額定值,且基本無環流,響應速度較快。 本文基于實驗室的兩臺逆變器并聯系統進行了實驗驗證,并與仿真結果進行對比,逆變器容量為1kV·A,其他參數如表2所示。 表2 本文模型實驗參數 與仿真過程相同,分別采用未加虛擬阻抗的傳統雙環控制策略和本文提出的控制策略進行兩組試驗,實驗結果如圖10所示。 (a)傳統雙環控制下的逆變器輸出有功功率 (b)本文控制方法下的逆變器輸出有功功率 (c)傳統雙環控制下的逆變器輸出無功功率 (d)本文控制方法下的逆變器輸出無功功率 (e)本文控制方法下的逆變器輸出電流 (f)本文控制方法下的逆變器輸出電壓 (g)本文控制方法下的逆變器頻率 從圖10a和圖10b可以看出,與仿真波形相似,采用傳統的未加虛擬阻抗的雙環控制時,并聯逆變器的輸出有功功率不能準確均分,P1、P2大約相差0.2 kW,而加入虛擬阻抗后,有功功率均分較好。從圖10c和圖10d可以看出,未加入虛擬阻抗時,兩逆變器輸出無功功率也存在偏差,而加入虛擬阻抗后,無功功率也能較好地均分。 采用本文算法的實驗過程如下。逆變器1單獨帶負載運行,提供給負載有功、無功功率,根據下垂特性,其電壓和頻率會小于額定值,但采用本文算法對電壓和頻率的參考值進行動態調節,電壓和頻率始終保持在額定值,見圖10f、圖10g(圖10f為逆變器1的a相電壓)。在某一時刻,投入逆變器2,由兩臺逆變器并聯運行,均分負載功率,因此逆變器1的輸出功率迅速減小,系統通過判斷開關,暫停對電壓和頻率的補償調節,切換到傳統下垂控制模式下,逆變器1的電壓和頻率迅速降低到額定值以下,且隨著輸出功率減小,其電壓幅值和頻率逐漸增大,但維持在額定值以下。同時,采用含有虛擬阻抗的控制策略,實現有功、無功的解耦控制,使兩臺逆變器均分負載功率,由圖10b、圖10d、圖10e(圖10e為兩臺逆變器的a相電流)可以看出,功率均分精度較高,動態響應較快。當系統檢測到功率均分完成后,重新切換到電壓和頻率補償調節模式,逐漸微調電壓和頻率恢復到額定值,兩臺逆變器輸出電壓相同,功率保持均分,環流較小,提供較高的電能質量。 虛擬阻抗的應用改變了逆變器的輸出阻抗特性,有效抑制了線路參數差異對功率分配造成的影響,提高了并聯逆變器的輸出功率均分精度。在微電網孤島運行時,提出的控制策略彌補了傳統逆變器并聯技術的不足,實現了電壓和頻率的二次調節,使微電網孤島運行時電壓和頻率維持在額定值,保持較高的電能質量,實現了微電網孤島運行時并聯逆變器的功率與電壓均衡控制,具有較高的使用價值。 [1] 陳宏志, 王旭, 劉建昌. 基于虛擬電阻匹配模式的逆變器并聯方案 [J]. 中國電機工程學報, 2012, 32(6): 24-32. CHEN Hongzhi, WANG Xu, LIU Jianchang. Current sharing method for parallel inverters based impedance matching mode [J]. Proceedings of the CSEE, 2012, 32(6): 24-32. [2] SHI Hongtao, ZHUO Fang, HOU Lixiang, et al. Small-signal stability analysis of a microgrid operating in droop control mode [C]∥2013 IEEE Energy Conversion Congress and Exposition Asia. Piscataway, NJ, USA: IEEE, 2013: 882-887. [3] GUERRERO J M, VICUNA L G, MATAS J, et al. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control [J]. IEEE Transactions on Industrial Electronics, 2005, 52(4): 1126-1135. [4] SHI Hongtao, YANG Zhen, YUE Xiaolong, et al. Calculation and measurement of harmonic impedance for a microgrid operating in islanding mode [C]∥2012 7th International Power Electronics and Motion Control Conference. Piscataway, NJ, USA: IEEE, 2012: 356-361. [5] MOHAMED Y A R I, EL-SAADANY E F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids [J]. IEEE Transactions on Power Electronics, 2008, 23(6): 2806-2816. [6] YAO Wei, CHEN Min, MATAS J, et al. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing [J]. IEEE Transactions on Industrial Electronics, 2011, 58(2): 576-587. [7] 姚瑋, 陳敏, 陳晶晶, 等. 一種用于無互連線逆變器并聯的多環控制方法 [J]. 電工技術學報, 2008, 23(1): 84-89. YAO Wei, CHEN Min, CHEN Jingjing, et al. An improved wireless control strategy for parallel operation of distributed generation inverters [J]. Transactions of China Electrotechnical Society, 2008, 23(1): 84-89. [8] HE Jinwei, LI Yunwei. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation [J]. IEEE Transactions on Industrial Applications, 2011, 47(6): 2525-2538. [9] GUERRERO J M, DE VICUNA L G, MATAS J, et al. A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems [J]. IEEE Trans on Power Electronics, 2004, 19(5): 1205-1213. [10]姚瑋, 陳敏, 牟善科, 等. 基于改進下垂法的微電網逆變器并聯控制技術 [J]. 電力系統自動化, 2009, 33(6): 77-80. YAO Wei, CHEN Min, MOU Shanke, et al. Paralleling control technique of microgrid inverters based on improved droop method [J]. Automation of Electric Power Systems, 2009, 33(6): 77-80. [11]張慶海, 彭楚武, 陳燕東, 等. 一種微電網多逆變器并聯運行控制策略 [J]. 中國電機工程學報, 2012, 32(25): 126-132. ZHANG Qinghai, PENG Chuwu, CHEN Yandong, et al. A control strategy for parallel operation of multi-inverters in microgrid [J]. Proceedings of the CSEE, 2012, 32(25): 126-132. [12]王成山, 肖朝霞, 王守相. 微網綜合控制與分析 [J]. 電力系統自動化, 2008, 32(7): 98-103. WANG Chengshan, XIAO Zhaoxia, WANG Shouxiang. Synthetical control and analysis of microgrid [J]. Automation of Electric Power Systems, 2008, 32(7): 98-103. [13]周念成, 金明, 王強鋼, 等. 串聯和并聯結構的多微網系統分層協調控制策略 [J]. 電力系統自動化, 2013, 37(12): 13-18. ZHOU Niancheng, JIN Ming, WANG Qianggang, et al. Hierarchical coordination control strategy for multi-microgrid system with series and parallel structure [J]. Automation of Electric Power Systems, 2013, 37(12): 13-18. [14]王永剛. 基于下垂控制的微網頻率穩定性分析 [D]. 北京: 華北電力大學, 2012. [15]張東, 卓放, 師洪濤, 等. 分布式發電系統三相變流器軟件鎖相環設計 [J]. 電力電子技術, 2013, 47(10): 43-45. ZANG Dong, ZHUO Fang, SHI Hongtao, et al. Design of the software phase locked loop for the three phase converter in distributed power generation system [J]. Power Electronics, 2013, 47(10): 43-45. (編輯 杜秀杰) BalancedControlStrategyforParalleledInverterPowerandVoltageinIslandedMicro-Grid GENG Zhiqing,ZHUO Fang,NING Gaidi,SHI Hongtao,ZHANG Dong,ZHAI Hao (School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China) Considering the low power allocation accuracy of paralleled inverters system using traditional double-loop control and the voltage and frequency deviations caused by droop control in micro-grid, the power allocation mechanism and output voltage characteristics of a parallel system are discussed, and a balanced control strategy of power and voltage for inverters parallel operation is proposed based on virtual impedance and instantaneous output voltage/frequency regulation. Virtual impedance is added to existing control loops to improve the characteristics of output impedance, and the power allocation accuracy is enhanced withP-ω,Q-Vdroop control. A scheme for regulating output voltage magnitude and frequency also participates in the loops to exert secondary regulation on the voltage and frequency deviations from droop control, and the higher output voltage quality remains. The simulation and experiment demonstrate that the proposed balanced control strategy for power and voltage makes the paralleled inverters share the load power better and preserves the rated output voltage and frequency in islanded micro-grid. micro-grid; paralleled inverters; power sharing; voltage/frequency regulation; balanced control 2014-03-23。 耿志清(1989—),男,碩士生;卓放(通信作者),男,教授。 國家自然科學基金資助項目(51177130);國家高技術研究發展計劃資助項目(2012AA050206)。 時間:2014-07-28 10.7652/xjtuxb201412007 TM464 :A :0253-987X(2014)12-0041-08 網絡出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20140728.1036.002.html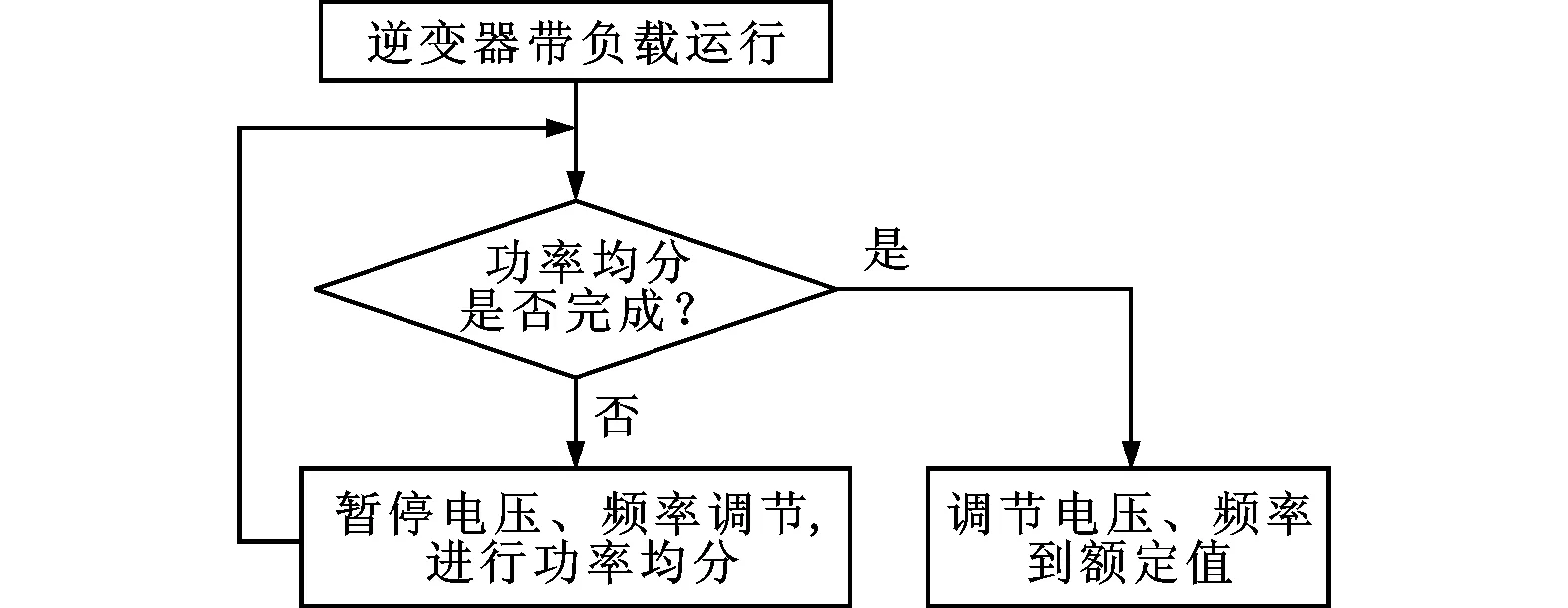
3 仿 真
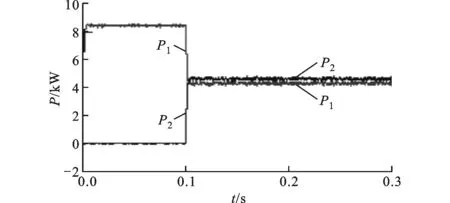
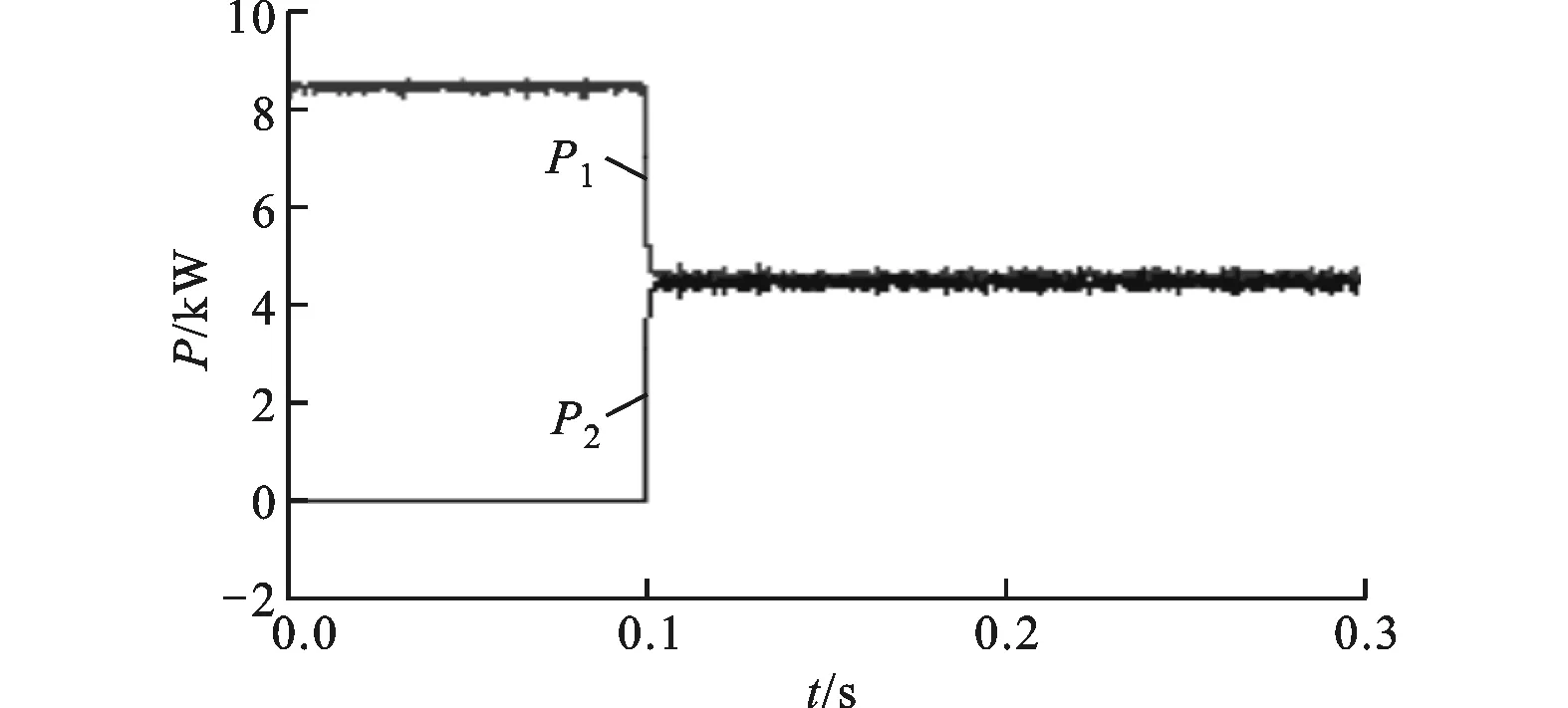
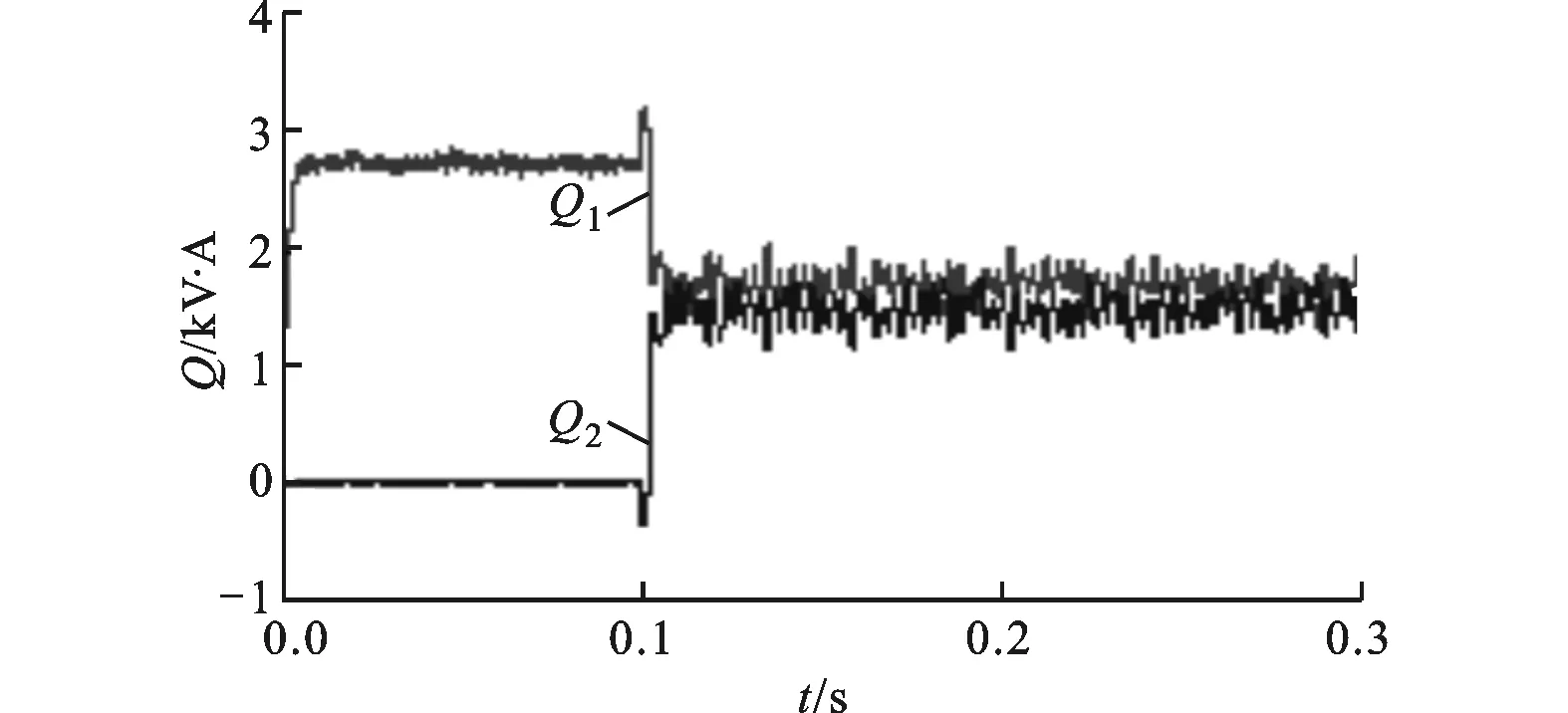
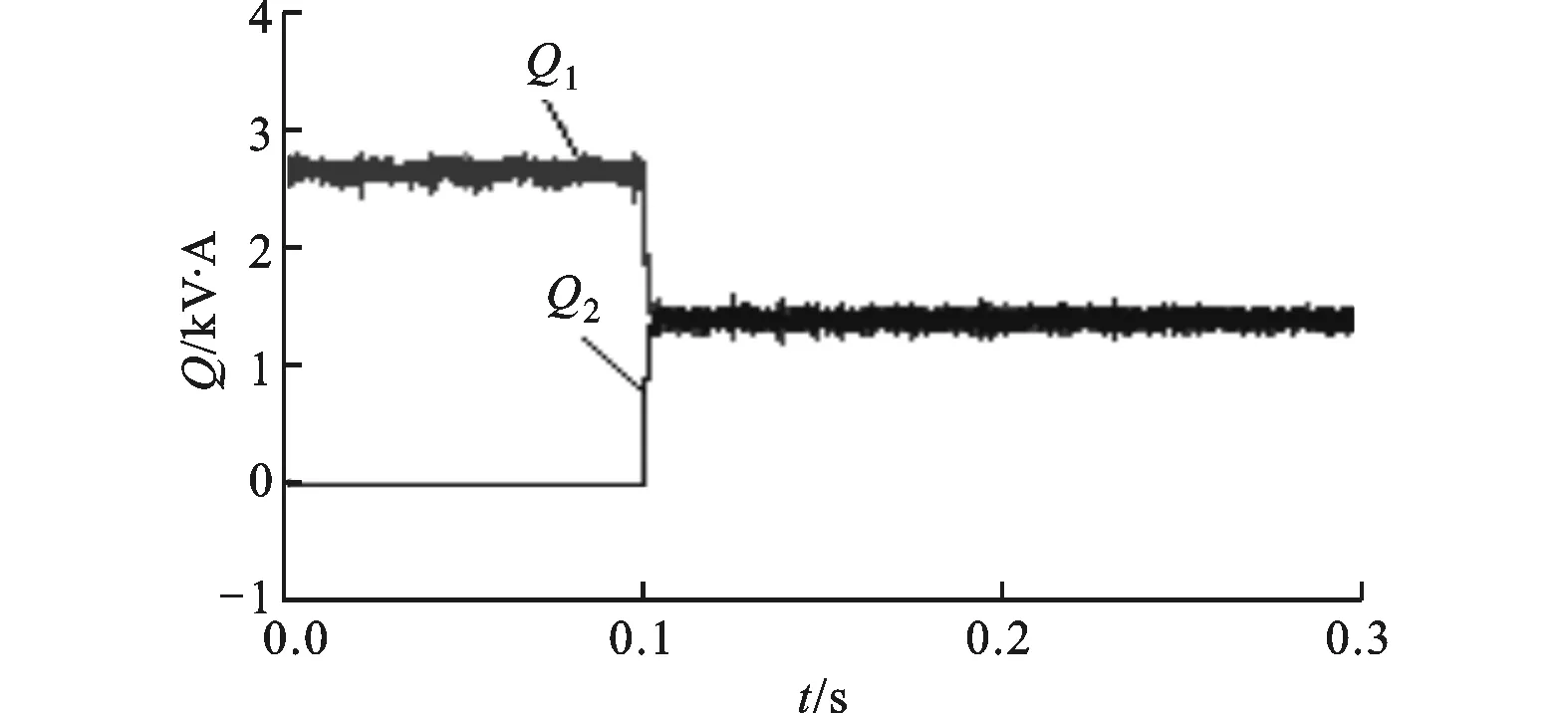
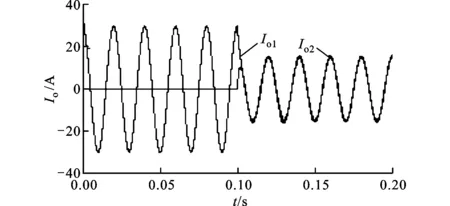
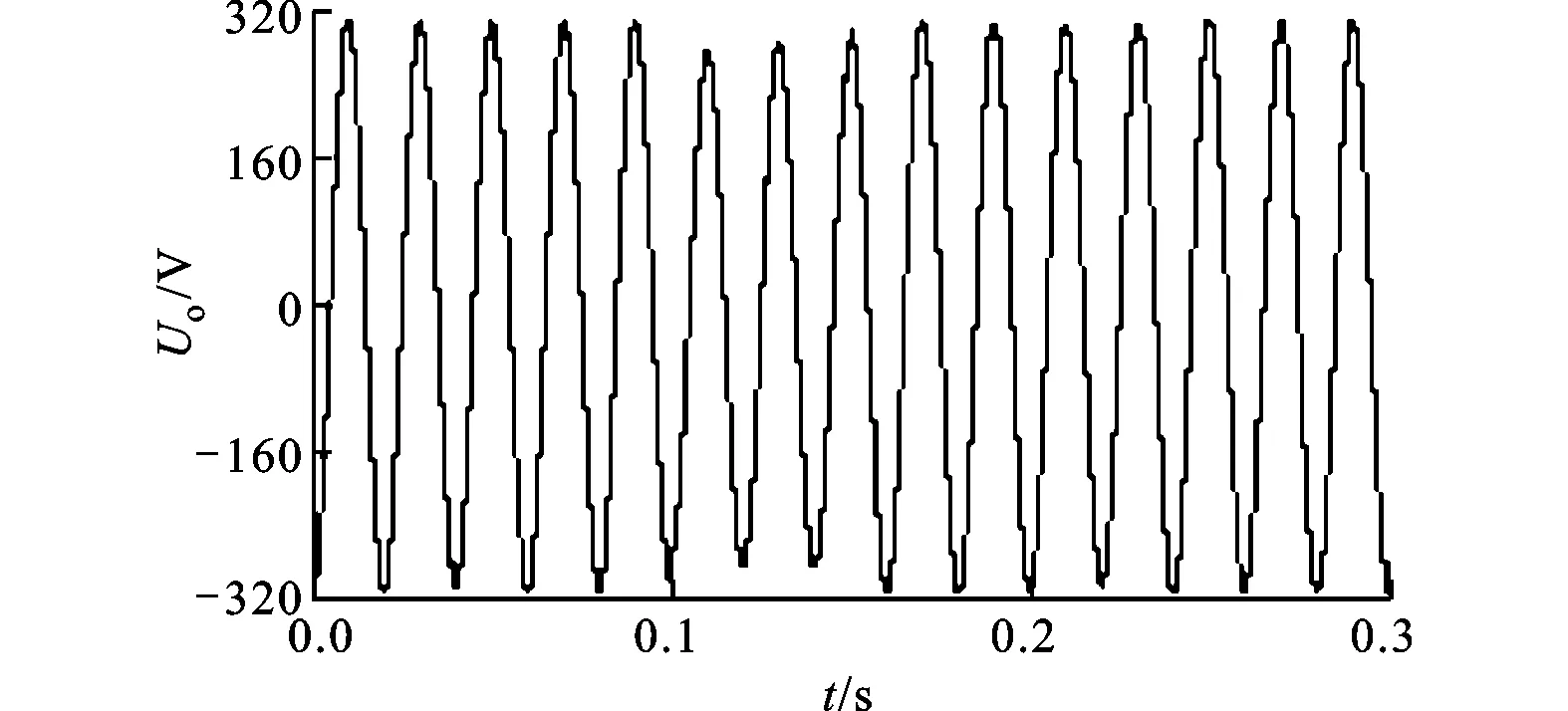
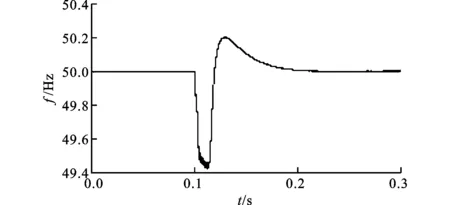
4 實 驗
5 結 論
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36