拓展目標量測集合分割算法
2014-08-08 01:00:59閆小喜韓崇昭李威連峰
西安交通大學學報 2014年9期
關鍵詞:模型
閆小喜,韓崇昭,李威,連峰
(1.江蘇大學電氣信息工程學院, 212013, 江蘇鎮江; 2.西安交通大學電子與信息工程學院, 710049, 西安)
拓展目標量測集合分割算法
閆小喜1,韓崇昭2,李威2,連峰2
(1.江蘇大學電氣信息工程學院, 212013, 江蘇鎮江; 2.西安交通大學電子與信息工程學院, 710049, 西安)
針對拓展目標概率假設密度濾波器采用的量測集合所有可能分割方式在實際中幾乎不能夠實現的問題,提出了一種采用有限混合模型的量測集合近似分割算法,對所有可能分割方式進行近似處理。算法利用有限混合模型擬合量測集合以實現對量測集合的分割,首先利用期望極大化算法極大似然估計混合參數,然后利用量測來源的條件概率分割量測集合,最后以二維場景為例進行了仿真實驗。仿真結果表明:新算法在所有時刻上的最優子模式分配和混合分量數目均小于現有的典型量測集合分割算法;在拓展目標跟蹤性能上,新算法具有更好的多拓展目標跟蹤性能。
拓展目標跟蹤;概率假設密度;量測集合分割;有限混合模型
目標跟蹤主要解決從目標量測和雜波中估計目標數目和目標狀態的問題。目前,絕大多數目標跟蹤算法是在“每個目標在一個時刻至多產生一個量測”的前提假設下建立起來的,即把目標簡化為一個質點[1-3]。已有點目標跟蹤算法大部分是基于數據關聯的,需要建立起目標與量測的對應關系,此類方法是利用分散策略解決目標跟蹤問題。近幾年出現了利用整體策略的跟蹤算法,即概率假設密度點目標跟蹤算法[4-12]。然而,隨著現代雷達系統分辨率的不斷提高,尤其是高分辨率雷達和相控陣雷達的出現,雷達距離向分辨單元一般小于目標尺寸,一個雷達目標通常具有多個散射中心,該多散射中心特性體現在量測上為“每個目標在每個時刻產生多個量測”。因此,基于“每個目標在一個時刻至多產生一個量測”的點目標跟蹤算法不再適合現代雷達系統,在“每個目標在每個時刻產生多個量測”情況下的目標跟蹤應當視為拓展目標跟蹤[13]。對于特定約束條件下的單拓展目標,已有粗略的序貫蒙特卡羅實現方法[14-15]和Bayesian實現方法[16-17]。對于一般情況下的拓展目標跟蹤問題,一直缺乏嚴密的解決策略,直到拓展目標概率假設密度濾波器的出現[18]。拓展目標概率假設密度濾波器從概率假設密度的整體角度解決拓展目標狀態估計問題,避免了數據關聯環節。在拓展目標線性高斯假設下,可以利用加權高斯混合分量實現拓展目標概率假設密度濾波器[19]。
在拓展目標概率假設密度濾波器的高斯混合實現的步驟中,對量測集合的分割步占據著重要的地位,決定了整個實現算法的混合分量數目,從而決定了整個實現算法的拓展目標狀態估計性能。然而,拓展目標概率假設密度濾波器用到的是量測集合的所有可能分割方式,在實際應用時,所有可能分割方式幾乎是不能夠實現的,需要對其進行近似處理。針對該問題,提出了一種基于有限混合模型的量測集合近似分割算法。
1 問題描述
拓展目標概率假設密度濾波器的預測步為
(1)
式中:vk|k-1是時刻k預測目標強度;pS,k是存活概率;fk|k-1是狀態轉移密度;vk-1是時刻k-1目標強度;βk|k-1是衍生轉移密度;γk是出生強度。
拓展目標概率假設密度濾波器更新步[18]為
vk|k(x)=LZk(x)vk|k-1(x)
(2)
偽量測似然
LZk(x)=1-(1-e-λ(x))PD(x)+
(3)
式中:λ(x)是拓展目標期望量測數;PD是檢測概率;p∠Zk是對量測集合Zk的分割;ωp是量測集合方式p在所有可能分割方式中所占的比重;W是量測分割單元;|W|是分割單元W中量測的數目;φz(x)=φ(z|x)是單量測似然;λc是期望雜波數目;ck(z)是雜波分布;分割單元因子
dW=δ|W|,1+

(4)
其中δ是Kronecker delta函數。
預測目標強度vk|k-1關于函數h(x)的復合強度函數定義為
(5)
與點目標概率假設密度濾波器高斯混合實現算法類似[11],拓展目標概率假設密度濾波器在拓展目標線性高斯假設條件下具有高斯混合實現形式,該實現形式利用高斯混合近似拓展目標概率假設密度[19]。該高斯混合實現算法主要包括預測高斯混合實現步、量測集合分割步、更新高斯混合實現步、混合分量刪減步和狀態提取步。式(3)對拓展目標概率假設密度的更新分為3個層次來實現:第1層次是量測集合分割層p∠Zk;第2層次是量測集合分割單元層W∈p;第3層次是單獨量測層z∈W。其中,第1層次p∠Zk所表示的對量測集合Zk的分割,決定著第2層次和第3層次,是整個高斯混合實現算法中至關重要的一步,決定了整個高斯混合實現算法的混合分量數目、算法精度和時間開銷。從式(3)關于p∠Zk的求和運算可以看出,此步是利用量測集合Zk的所有可能分割方式更新拓展目標概率假設密度。由于所有可能分割方式數目隨著量測數目的增長而呈組合爆炸式增長,所以在具體實現中很難實現所有可能分割方式,即使對量測數目較少的量測集合Zk勉強實現所有可能分割方式,也會引入數目眾多的混合分量,導致較大的時間開銷,使整個高斯混合實現算法失去意義。因此,在拓展目標概率假設密度濾波器高斯混合實現中,需要對量測集合的所有可能分割方式進行近似處理,使得整個算法具有可行性。
2 算 法
如問題描述部分所述,我們的目的是對量測集合Z進行近似分割(為了簡單,此部分省略量測集合Zk的下標k)。首先明確此處對拓展目標量測集合Z分割的基本要求:
(1)每一量測集合分割方式p∠Z中量測分割單元W非空;
(2)每一量測集合分割方式p∠Z中量測z所歸屬量測分割單元W唯一;
(3)每一量測集合分割方式p∠Z中量測分割單元W內量測z無序。
所提基于有限混合模型的量測集合近似分割算法,依據拓展目標的一個基本事實:每個拓展目標所產生的多量測分布在拓展目標附近,屬于同一拓展目標的量測在空間上相距較近,不屬于同一個拓展目標的量測在空間上相距較遠。以此基本事實為出發點,所提算法利用有限混合模型擬合拓展目標量測集合以實現對量測集合的分割,使由同一拓展目標所產生的多個量測能夠分割在同一量測分割單元中。具體來說,有限混合模型的擬合過程為量測集合的分割過程,擬合后每個混合分量對應一個量測分割單元,即擬合后混合分量數目等于量測集合分割單元數。每個量測根據其來自于混合分量的來源指示條件概率判斷其量測分割單元的歸屬:選擇量測的最大來源指示條件概率所對應的混合分量作為該量測的歸屬分割單元。
對量測集合Z={z1,…,zn},利用具有m混合分量的有限混合模型p(z|θ)進行擬合。該有限混合模型為
(6)
式中:πj表示分量j的混合權重;θj={μj,Cj}表示由均值μj和方差Cj構成的分量j的參數集合;θ={π1,…,πm,θ1,…,θm}表示整個有限混合模型的參數集合,有限混合模型的混合權重π1,…,πm滿足
(7)
量測集合Z={z1,…,zn}的對數似然
(8)
所提算法采用極大似然方式分割量測集合,極大似然估計混合模型參數為

(9)

(10)


(11)
式中:t為期望極大化算法的迭代次數。W插入完全對數似然logp(Z,B|θ)后所構成的品質函數為

(12)
式中條件期望W的元素
(13)

(14)
式(14)對有限混合模型參數的更新包括對混合權重的更新、對分量均值的更新和對分量方差的更新。關于混合權重的更新,算法采用與文獻[20]類似的更新方式
(15)
式中:N表示用于描述每個混合分量的參數元素數目。在式(15)中,通過混合權重的置零操作來實現對具有負混合權重的混合分量的刪減。對經式(15)更新后的所有非零混合權重進行正規化,調整量測集合Z={z1,…,zn}在各混合分量間的證據分配。經式(15)更新后,非零混合權重所對應的混合分量的均值μj和方差Cj的更新方式為
(16)
(17)
此處混合分量均值和方差的更新方式與文獻[21]類似。
在算法起始步,需用較多數目的混合分量初始化有限混合模型(即初始化時混合分量數目m較大),以提高有限混合模型對量測集合的覆蓋程度。

3 仿真實驗
下面,以二維場景[-1000,1000]×[-1000,1000]為例來證明所提基于有限混合模型的量測集合分割算法的優勢。拓展目標運動模型為


拓展目標單量測方程為
式中:量測噪聲[w1,k,w2,k]T是零均值高斯白噪聲,其分量標準差σw1=σw2=20m。與文獻[19]中針對高分辨率雷達的拓展目標跟蹤方法所取參數一致,每個拓展目標在每個時刻產生的量測數目服從參數為10的泊松分布,雜波數目服從參數為50的泊松分布,雜波在跟蹤場景內均勻分布,檢測概率為0.99。
算法在有限混合模型初始化時,取混合分量數目為50,混合參數迭代估計過程的終止條件為完全對數似然的相對變化率低于10-4。
在一次蒙特卡羅實驗中,x坐標和y坐標的拓展目標真實值和算法估計值分別顯示在圖1和圖2中。結果表明,所提量測集合分割算法在拓展目標高斯混合實現中能夠正確估計多拓展目標狀態,并能夠識別拓展目標的出生和衍生。

圖1 x坐標的估計值與真實值
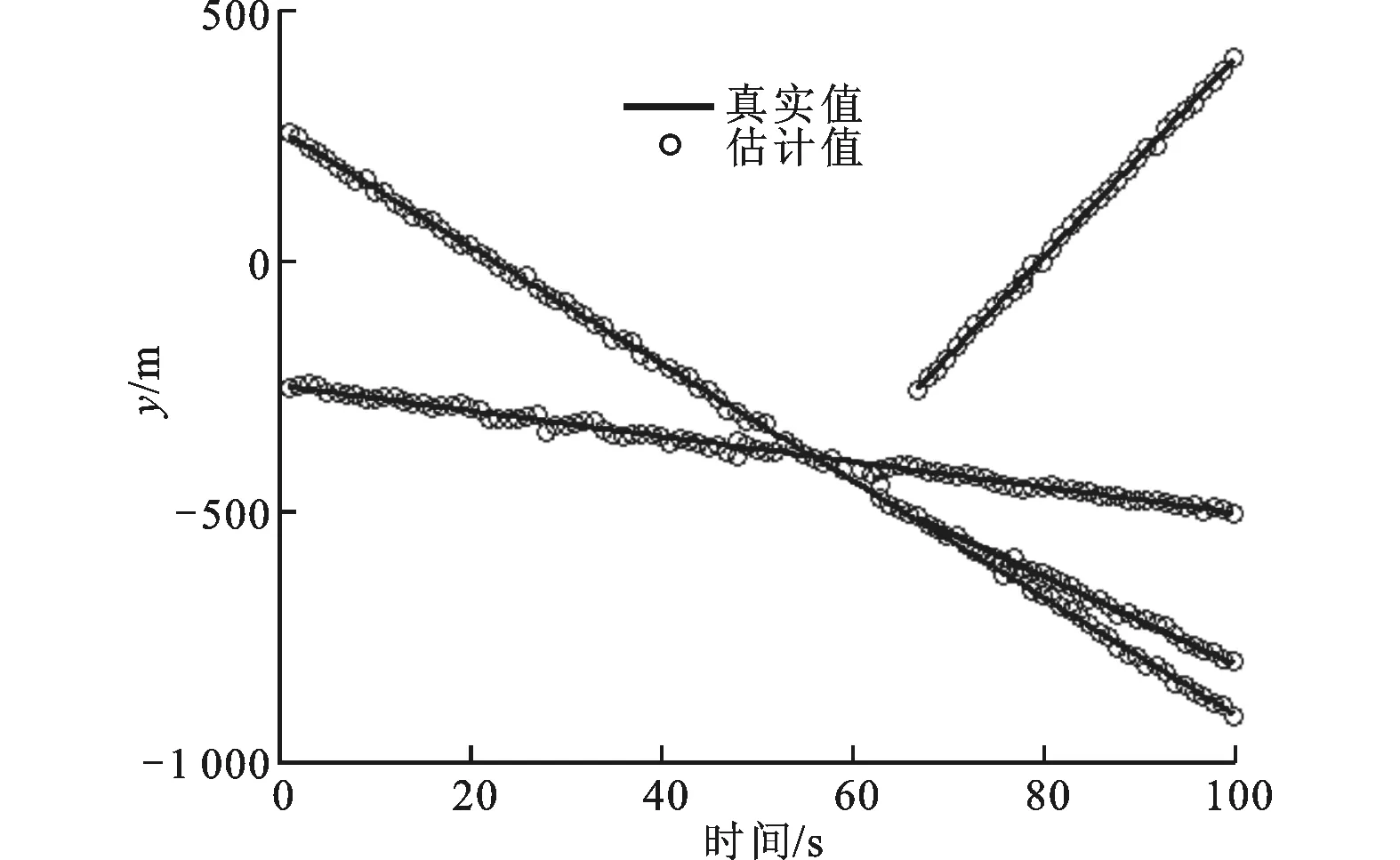
圖2 y坐標的估計值與真實值


兩種算法混合分量數目的對比如圖4所示,可以看出,所提量測集合分割算法的混合分量數目小于典型量測集合分割算法的數目。

圖3 50次蒙特卡羅的OSPA

圖4 兩種算法的混合分量數目對比
4 結 論
針對拓展目標概率假設密度濾波器高斯混合實現中的關鍵量測集合分割問題,提出了基于有限混合模型的量測集合分割算法,對量測集合的所有可能分割方式進行近似。算法依據拓展目標的多量測分布在拓展目標附近的事實,把量測集合的近似分割問題歸結為有限混合模型的極大似然估計問題。實驗結果表明,所提基于有限混合模型的量測集合分割算法具有更好的多拓展目標跟蹤性能。
[1] PULFORD G E. Taxonomy of multiple target tracking methods [J]. IET Proceeding of Radar, Sonar and Navigation, 2005, 152(2): 291-304.
[2] BLACKMAN S, POPOLI R. Design and analysis of modern tracking systems [M]. Norwood, USA: Artech House, 1999.
[3] BAR S Y, LI Xiaorong. Multitarget-multisensor tracking: principles and techniques [M]. Storrs, USA: YBS Publishing, 1995.
[4] MAHLER R. Multi-target Bayes filtering via first-order multi-target moments [J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178.
[5] MAHLER R. PHD filters of higher order in target number [J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543.
[6] MAHLER R. Statistical multisource-multitarget information fusion [M]. Norwood, USA: Artech House, 2007.
[7] MAHLER R, VO B T, VO B N. Forward-backward probability hypothesis density smoothing [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 707-728.
[8] VO B N, VO B T, MAHLER R. Closed-form solutions to forward-backward smoothing [J]. IEEE Transactions on Signal Processing, 2012, 60(1): 2-17.
[9] 閆小喜, 韓崇昭. 應用Dirichlet分布的概率假設密度多目標跟蹤 [J]. 西安交通大學學報, 2011, 45(2): 6-10.
YAN Xiaoxi, HAN Chongzhao. Multiple target tracking by probability hypothesis density based on Dirichlet distribution [J]. Journal of Xi’an Jiaotong University, 2011, 45(2): 6-10.
[10]VO B N, SINGH S, DOUCET A. Sequential Monte Carlo methods for multi-target filtering with random finite sets [J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245.
[11]VO B N, MA Wing-kin. The Gaussian mixture probability hypothesis density filter [J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104.
[12]VO B T, VO B N, CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter [J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553-3567.
[13]GILHOLM K, SALMOND D. Spatial distribution for tracking extended objects [J]. IEEE Proceedings of Radar, Sonar and Navigation, 2005, 152(5): 364-371.
[14]VERMAAK J, IKOMA N, GODSILL S J. Sequential Monte Carlo framework for extended object tracking [J]. IEEE Proceedings of Radar, Sonar and Navigation, 2005, 152(3): 353-363.
[15]ANGELOVA D, MIHAYLOYA L. Extended object tracking using Monte Carlo methods [J]. IEEE Transactions on Signal Processing, 2008, 56(2): 825-832.
[16]KOCH J W. Bayesian approach to extended object and cluster tracing using random matrices [J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042-1059.
[17]VO B T, VO B N, CANTONI A. Bayesian filtering with random finite set observations [J]. IEEE Transactions on Signal Processing, 2008, 56(4): 1313-1326.
[18]MAHLER R. PHD filters for nonstandard targets: I extended object [C]∥The 12th International Conference on Information Fusion. Piscataway, NJ, USA: IEEE, 2009: 915-921.
[19]GRANSTROM K, LUNDQUIST C, ORGUNER O. Extended target tracking using a Gaussian-mixture PHD filter [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3268-3286.
[20]FIGUEIREDO M, JAIN A K. Unsupervised learning of finite mixture models [J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 2002, 24(3): 381-396.
[21]ZIVKOVIC Z, HEIJDEN F V. Recursive unsupervised learning of finite mixture models [J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 2004, 26(5): 651-656.
[22]HOFFMAN J, MAHLER R. Multitarget miss distance via optimal assignment [J]. IEEE Transactions on Systems, Man and Cybernetics: Part A, 2004, 34(3): 327-336.
[23]SCHUHMACHER D, VO B T, VO B N. A consistent metric for performance evaluation of multi-object filters [J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457.
(編輯 趙煒)
APartitionAlgorithmofMeasurementSetsforExtendedObjects
YAN Xiaoxi1,HAN Chongzhao2,LI Wei2,LIAN Feng2
(1. School of Electrical and Information Engineering, Jiangsu University, Zhenjiang, Jiangsu 212013, China;2. School of Electronics and Information Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
An approximate partition algorithm of measurement sets is proposed to overcome the problem that it is impossible to implement all the possible partitions of a measurement set in density filters with extended object probability hypothesis, and the algorithm bases on a finite mixture model. The finite mixture model is used to fit the measurement set and then the partition of the measurement set is implemented. The expectation maximization algorithm is employed to obtain the maximum likelihood estimation of mixture parameters. Then, the conditional probability of the measurement source is applied in partitioning the measurement set. Simulation results show that the proposed algorithm is superior to typical partition algorithm of measurement sets in extended object tracking.
extended object tracking; probability hypothesis density; measurement set partition; finite mixture model
2014-03-08。
閆小喜(1981—),男,博士,講師。
國家自然科學基金資助項目(61304261);江蘇大學高級人才啟動基金資助項目(12JDG076)。
時間:2014-07-02
10.7652/xjtuxb201409004
TP274
:A
:0253-987X(2014)09-0019-05
網絡出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20140702.1107.002.html
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
