基于諧波電流閉環控制的九相感應電機矢量控制系統
2014-08-08 01:18:20梅柏杉馮江波
電機與控制應用 2014年10期
梅柏杉, 馮江波, 吳 迪
(上海電力學院 電氣工程學院, 上海 200090)
0 引 言
多相電機驅動系統相對于三相驅動系統來說具有很多優勢[1]:更容易以低壓功率器件實現大功率傳動;可使轉矩脈動幅值減小,頻率增加;通過注入諧波來提高電機鐵心利用率,增大電機的轉矩密度;更重要的是,多相電機具有更多的控制自由度,增加的自由度可用來實現電機在缺相故障下的容錯運行,使得多相電機具有較高的可靠性。
本文以一臺九相集中整距繞組感應電機為例,建立了其在d、q坐標系下的數學模型[2],并對其基于轉子磁鏈定向下的控制系統進行研究,由于九相電機定子繞組會產生大量的諧波,所以在電機的變頻調速控制系統中必須考慮諧波電流的抑制。因此,本文提出的控制系統不僅考慮其基波電流的影響,對于可控的3、5、7次諧波電流也進行了閉環控制,有效地抑制了諧波電流。
1 九相旋轉坐標變換矩陣
通過對九相集中整距繞組感應電機進行磁動勢分析,對電機有較大影響的為其3、5、7次諧波電流[5],且基波與3、5、7次諧波電流間是相互解耦的。因此,與三相旋轉坐標變換類似,可通過九相旋轉坐標變換將九相電機映射到4個相互獨立的dk、qk平面上,其中k(k=1、3、5、7)次諧波平面的電角度為k2π,對應knp對極的九相正弦波繞組電機。k次諧波電流的頻率為基波電流頻率的k倍。也就是說,可以將一臺九相集中整距繞組感應電機等效為4臺正弦波繞組電機,只是這4臺正弦波繞組電機電流頻率不同,對應的極對數不同。
由于本文建立的是九相集中整距繞組感應電機在d、q坐標系下的數學模型,因此需要一個九相的旋轉坐標變換矩陣將電機在自然坐標系下的方程轉換到旋轉坐標系下[3],使得電機定子繞組各相間實現解耦。遵循磁動勢不變原則,其變換矩陣如式(1)所示。

cosθcos(θ-?)cos(θ-2?)…cos(θ-8?)-sinθ-sin(θ-?)-sin(θ-2?)…-sin(θ-8?)cos3θcos3(θ-?)cos3(θ-2?)…cos3(θ-8?)-sin3θ-sin3(θ-?)-sin3(θ-2?)…-sin3(θ-8?)????cos7θcos7(θ-?)cos7(θ-2?)…cos7(θ-8?)-sin7θ-sin7(θ-?)-sin7(θ-2?)…-sin7(θ-8?)121212…12
(1)

(2)
上述變換矩陣及其逆矩陣在MATLAB中通過編寫S函數來實現。
2 九相感應電機的數學模型
九相集中整距繞組感應電機中3、5、7次諧波電流產生的相同次數磁動勢與基波電流產生的磁動勢均以基波同步速正向旋轉[4-5]。九相集中整距繞組感應電機可以等效為4個相互獨立的九相正弦波繞組電機。據此可列寫電機的動態方程組。電機定子側空間矢量包括定子電壓矢量,定子電流矢量和定子磁鏈矢量,定子側的變量用下標s加以區別。轉子側與定子側類同,也包括電壓、電流和磁鏈。轉子側的量用下標r來區別。經過上述坐標變換矩陣,可將電機在自然坐標系下的復雜數學模型轉換為旋轉坐標系下的動態模型,其電壓方程、磁鏈方程、電磁轉矩表達式及機械運動方程如式(3)~式(8)所示。
(3)
(4)
(5)
(6)
(7)
(8)
式中:Lkls——k次諧波平面定子漏感;
Lklr——k次諧波平面轉子漏感;
Lkm——k次諧波平面定轉子之間互感;
np——電機極對數;
J——電機和其負載的轉動慣量;
B——摩擦系數。
由上述數學方程組構建的電機模型,適合于在MATLAB的Simulink工具箱中實現。
3 九相感應電機矢量控制系統
3.1 基波及各次諧波電流的解耦控制
由于九相集中整距繞組電機不像一般三相電機那樣通過短距和分布繞組來消除或減小諧波的影響,故其中存在不可忽視的諧波。在多相電機矢量控制系統中,若不進行諧波注入以增大轉矩輸出,則大多只對其基波電流加以閉環控制,而對于諧波電流只是在逆變器側進行諧波電壓抑制。本文在利用基波電流的同時對諧波電流加以閉環控制以抑制其影響。根據上文給出的九相坐標變換矩陣,將電機的定子電流分別變換到基波和各次諧波平面上。在基波平面,d1、q1兩軸的旋轉速度為ωs。若令d1軸總是沿著基波轉子磁鏈矢量ψ1r的方向,則轉子磁場只存在于d1上,q1軸的磁場為零。即將基波同步速旋轉坐標系按轉子磁場定向,此時(k=1)應有
ψ1dr=ψ1r
(9)
ψ1qr=0
(10)
將式(9)、式(10)代入式(5),化簡可得
(11)
(12)
在轉子磁場定向下時,轉子電壓方程式(4)可重新表示為[6]
(13)
u1qr=rri1qr+(ωs-ωr)ψ1dr
(14)
將式(11)、式(12)代入式(13)、式(14)且考慮到感應電機內部轉子繞組是短路的,即u1dr=u1qr=0,則可得
(15)
(16)
其中:p——微分算子;
ω1——基波平面對應的轉差頻率,ω1=ωs-ωr;
T1r=(L1m+L1ls)/rr。
同理,參考三相電機的矢量控制方程,可得出基波平面內定子電流轉矩分量的表達式為
(17)
由式(15)看出,轉子基波磁鏈ψ1r僅與基波定子電流勵磁分量i1ds有關,與定子電流的轉矩分量i1qs無關。由此實現了定子電流勵磁分量與轉矩分量的解耦[7-8]。
給定3,5,7次諧波電流的參考值都為零,參考值和實際值之差經過PI調節器產生各次諧波參考電壓,經過定子電壓方程的解耦和坐標逆變換,作為指令電壓送入九相WPWM逆變器。
3.2 定子電壓方程的解耦
由于本文的電機控制系統是經由PWM電壓型逆變器饋電的,因此必須利用定子電壓方程,即通過控制定子電壓去間接控制定子電流,這樣就需要對各個諧波平面定子電壓方程都進行解耦處理。
將磁鏈方程式(5)、式(6)代入定子電壓方程式(3)中,化簡可得
(18)
(19)

(20)
ukpq=kωsLksikds
(21)
將式(20)和式(21)分別加入到ikds和ikqs的PI調節器的輸出中,則其輸出端的電壓為
(22)
(23)
3.3 矢量控制原理圖
通過對九相感應電機定子的基波電流與3、5、7次諧波電流都進行閉環控制,即通過改善控制策略的方式將定子電流的諧波消除掉,使得系統的諧波損耗降低。諧波電流閉環控制的九相感應電機矢量控制系統結構如圖1所示[9]。

圖1 諧波電流閉環控制的九相感應電機矢量控制
3.4 仿真結果及其分析
為驗證上述控制策略的有效性,參照圖1在simulimk平臺下分別搭建了九相集中整距繞組感應電機諧波電流開環和閉環控制策略的仿真模型,其中九相電機參數如下[10]:定子電阻rs=0.846 2 Ω,轉子電阻rr=0.451 8 Ω,定子基波及各次諧波漏感為:L1ls=6.6 mH,L3ls=6.6 mH,L5ls=7 mH,L7ls=7.3 mH;轉子基波及各次諧波漏感為:L1lr=13.1 mH,L3lr=10.6 mH,L5lr=11.6 mH,L7lr=12.8 mH;基波及各個諧波平面互感依次L1m=270 mH,L3m=30.6 mH,L5m=11.1 mH,L7m=5 mH;電機極對數P=3,額定轉速為980 r/min。
設定電機轉速為980 r/min,電機所加外部初始負載為0 N·m,仿真時間設定為1 s。在0.3 s時刻,突加150 N·m額定負載。圖2、圖3分別為諧波電流開環和閉環控制時得到的定子電流(穩態時)波形。諧波分析結果如圖4、圖5所示。

圖2 諧波電流開環控制時電機定子電流波形
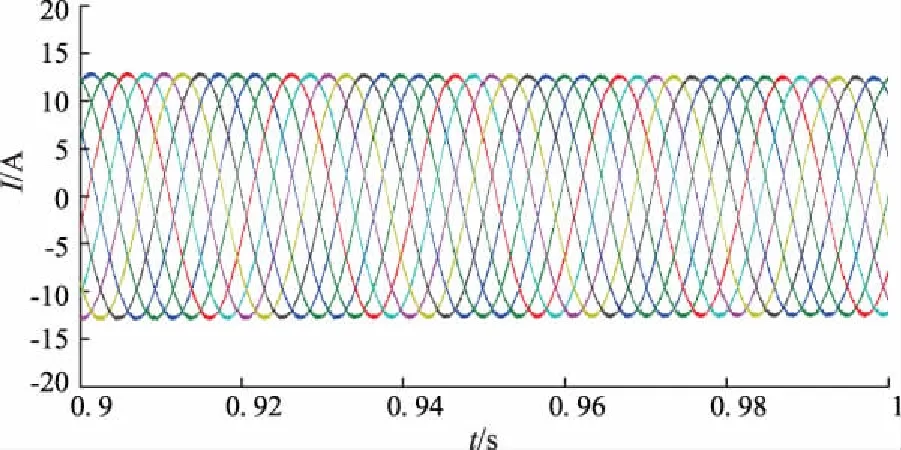
圖3 諧波電流閉環控制時電機定子電流波形
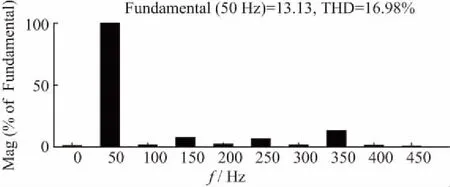
圖4 諧波電流開環控制時A相電流諧波分析

圖5 諧波電流閉環控制時A相電流諧波分析
由圖2、圖4可知,在開環控制時,由于電機繞組結構的原因,定子電流中諧波含量較大,波形畸變率較高。諧波電流的存在會使得電機在運行過程中出現較大的振動及損耗增加。由圖3和圖5則可看出,對諧波電流施行閉環控制后,定子電流諧波含量明顯降低,波形畸變率也大大減小。
諧波電流閉環控制時對應的轉速及轉矩波形如圖6所示。

圖6 諧波電流閉環控制時電機轉速及轉矩波形
由圖6可見,電機轉速跟蹤迅速,并且幾乎沒有超調,說明矢量控制系統的動態性能較佳,比較好地實現了實際轉速對于給定轉速的跟蹤。初始時外加負載為0 N·m,即電機空載起動,轉速響應迅速,在約0.11 s時刻達到給定轉速980 r/min。在電機達到給定轉速后,電流幅值變小,電磁轉矩也變小(空載轉矩)。在0.3 s時刻突加的150 N·m額定負載轉矩,使電機轉速稍有下降,但在速度和電流調節器的作用下,電磁轉矩響應迅速,很快又使得電機轉速恢復為額定轉速。綜上,對九相集中整距繞組感應電機的調速系統而言,采用諧波電流閉環控制的矢量控制策略可以有效抵制其定子的諧波電流,有效降低電機的諧波損耗,且轉速跟蹤迅速準確,但同時因為此控制策略含有8個電流環,控制起來也相對更加復雜一些。
4 結 語
本文根據建立的九相感應電機數學模型,搭建了完整的電機矢量控制系統模型。通過對控制系統仿真,得出采用諧波平面電流閉環控制的九相感應電機矢量控制策略可以有效抵制其定子的諧波電流,減小電機運行過程中的損耗和振動,且轉速跟蹤迅速準確,驗證了諧波電流閉環控制策略在九相感應電機轉子磁場定向矢量控制中具有一定的應用價值,并且為下一步進行諧波電流注入和容錯運行控制的研究奠定了基礎。
【參考文獻】
[1] 莊朝暉.多相感應電機調速系統[D]. 武漢:華中科技大學,2001.
[2] 王東,馬偉明,郭云,等.基于非正弦供電方式的多相感應電動機建模[J].電工技術學報,2010,25(2):6-14.
[3] 李勇,鄭琦,鄭瑜.九相感應電機與三相感應電機的性能比較[J].機電工程,2011,28(10):1273-1276.
[4] 王鐵軍,孟凡友,吳旭升. 多相異步電動機在廣義d-q-0 參照系中的仿真分析[J].海軍工程大學學報,2008,20(5):51-55.
[5] LEVI E, BOJOJ R, PROFUMO F, et al. Multiphase induction motor drivesa technology status review[J]. IET Electric Power Applications, 2007,1(4):489-516.
[6] LIU D, JIA Q, HUANG J, et al. Realization of a SPWM inverter for multi-phase induction motor drives[C]∥Proceedings of the International Conference on Electrical Machines and Systems, 2008: 1287-1290.
[7] 劉東,黃進,康敏,等.多相感應電機的非正弦供電技術[J].中國電機工程學報,2011,31(12):84-89.
[8] TIEJUN W, CHENGLIN G, YONGBING C, et al. Research on harmonics of multiphase induction motors in Proc [C]∥IEEE IEMDC, Antalya, Turkey. 2007:1524-1528.
[9] LEVI E. Multiphase electric machines for variable speed applications[J]. IEEE Trans Industrial Electronics, 2008,55(5):1893-1909.
[10] 劉東,黃進,康敏,等.多相異步電機參數的計算與測量[J].中國電機工程學報,2010,30(24):81-87.