衛星姿態控制系統的可重構性指標分配1
2014-08-09 22:15:35項昌毅程月華劉成瑞
航天控制 2014年2期
項昌毅 楊 浩 程月華 姜 斌 劉成瑞
1.南京航空航天大學自動化學院,南京 210016 2.南京航空航天大學高新技術研究院,南京 210016 3.北京控制工程研究所, 北京200233 4.北京市空間智能控制技術重點實驗室, 北京200233
?
衛星姿態控制系統的可重構性指標分配1
項昌毅1楊 浩1程月華2姜 斌1劉成瑞3,4
1.南京航空航天大學自動化學院,南京 210016 2.南京航空航天大學高新技術研究院,南京 210016 3.北京控制工程研究所, 北京200233 4.北京市空間智能控制技術重點實驗室, 北京200233

研究有約束條件下的可重構性指標分配問題,旨在為衛星姿態控制系統的可重構性指標分配找到合理的解決方案。結合衛星姿態控制系統可重構性統計數據不足的特點以及資源最優化的要求,將可重構性指標分配分為初次分配和再分配,由于衛星姿態控制系統因素指標的不確定性以及人的認識的模糊性,提出基于模糊綜合評價法的可重構性指標初次分配,仿真結果顯示了該方法的有效性。針對系統資源優化配置的要求,提出一種基于啟發式算法的可重構性指標再分配,該方法可解決約束條件內資源最優配置問題,并得到接近或者超過系統可重構度的最優解,最后將該算法用于衛星姿態控制系統仿真,與直接尋查法的分配結果作比較,顯示了新算法更好的適用性。由于所提的方法計算量較小,結果較精確,在工程領域具有很好的實際意義。
可重構性;可重構度;可重構性指標分配;衛星姿態控制系統;模糊綜合評價法;啟發式算法
隨著空間技術的不斷發展,衛星的應用越來越廣泛。由于衛星長期運行在失重和強輻射的深空環境中,機械或電氣部件的老化或磨損難免會造成部件故障,由此導致穩定度和控制精度等性能降低,甚至衛星控制系統的崩潰[1]。為了解決這些問題,許多學者展開了廣泛深入的研究,其中自適應控制、最優控制、反饋控制、H∞ 控制及綜合控制方法[2-6]在衛星姿態控制中得到了廣泛的研究和應用。上述研究均通過控制率重構等方法實現衛星欠驅動控制,由于衛星特殊的工作任務,通常重要部件是有冗余備份的,當冗余代替故障部件工作時,控制精度等性能指標與原系統沒有差別。因此,對部件冗余情況下的系統故障重構能力研究是非常有意義的[7-10]。
重構指系統從一種構形向另一種構形的轉換,是系統生存和發展的基本手段[11]。可重構性[12]指系統在一定條件下完成重構的能力。本文以衛星姿態控制系統為對象,提出一種可重構性指標分配的理論方法,用于系統可重構度最大的優化配置,最后通過仿真驗證了所提方法的有效性。
1 可重構度描述
本文解決的主要問題是衛星姿態控制系統的可重構性指標分配。衛星姿態控制系統是控制衛星姿態的系統,由控制器、執行器和傳感器等3個分系統串聯組成。可重構性指標分配是指將使用方提出的可重構性指標,從上而下分配到各分系統,設計最優化配置以滿足系統的可重構性要求。
在討論可重構性指標分配之前要明確什么是可重構性指標,本文將可重構性指標稱為可重構度。從工程實際出發,在軌衛星發生部件故障后,優先采用的是硬件備份切換方式來重構系統。假定部件之間沒有故障關聯,故障部件切換成功率達100%。當系統中只有一個獨立功能的部件發生故障時,定義為一重故障。同理,n重故障定義為同時有n個部件發生故障。當衛星發生n重故障時,該可重構性指標稱為n重可重構度。
定義1:當系統發生n重故障時,系統的n重可重構度為:
n重可重構度=
(1)
其中,0≤R≤1。由于衛星部件較高的可靠性,本文進行可重構性指標分配時只考慮二重故障,其它多重故障可重構性指標分配的步驟原理和二重故障是一致的。
1.1 二重可重構度計算
假設系統第k(k=1,2,3,分別表示控制器、執行器和傳感器)個分系統有mk個部件,其中可重構的一重故障有n1k(右下角標1表示一重故障)個,可重構的二重故障有n2k(右下角標2表示二重故障)個,則該系統二重可重構度R為:
(2)
從上述可重構度的定義看出,系統冗余的部件數越多,并不意味著可重構度就越高,可重構度的大小還與系統的配置方案有關。
2 衛星姿態控制系統的可重構性指標分配
由于可重構性統計數據不足的特點以及資源最優化要求,將衛星姿態控制系統的二重可重構度分配分為2個過程進行討論:初次分配和再分配。基本框圖如圖1所示。
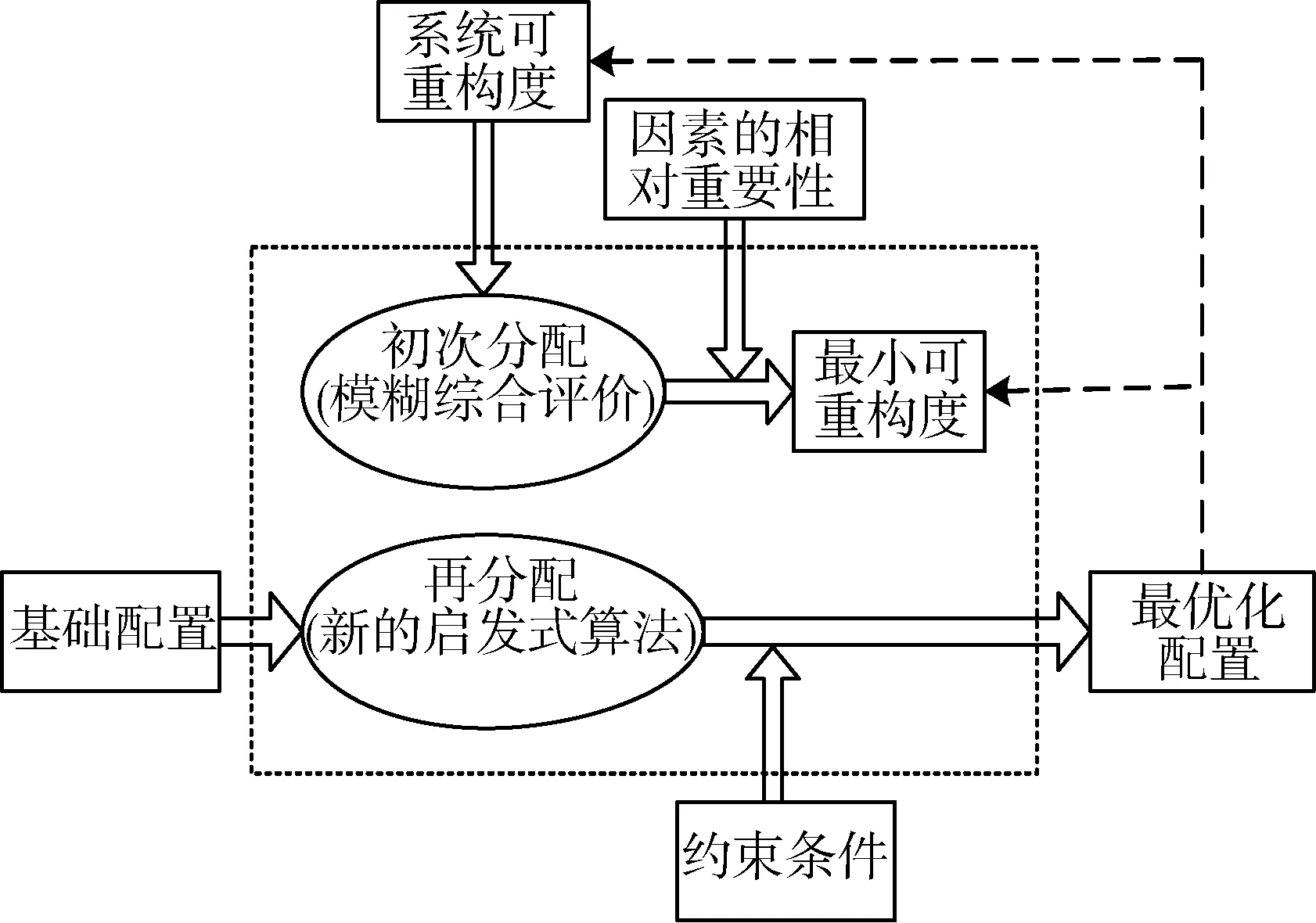
圖1 可重構性指標分配方法框圖
2.1 可重構性指標初次分配
衛星姿態控制系統包含3個分系統,在執行重構任務時每個分系統的可重構性要求各不相同,受到主觀評價不準確等方面的限制,有些因素很難用經典數學進行描述,所以借鑒模糊數學的理論,因為這種評價過程涉及模糊因素, 故稱這種評價是模糊綜合評價或模糊綜合決策[13]。圖2所示是模糊綜合評價法的基本流程。
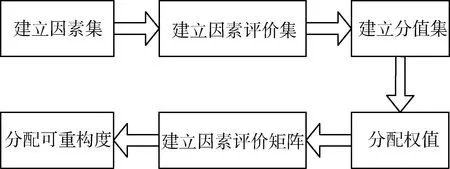
圖2 模糊綜合評價分配法的基本流程圖
(1) 建立因素集、因素評價集及相應的分值集
為了全面分析可重構性指標,評價指標的選取應遵循全面性、唯一性、科學性和可操作性等原則。依據上述規則,因素集U可取為:U={重量,經濟,能耗,可靠性,控制精度,故障可診斷性,重構風險性}
(3)
根據上述因素的特點,可把各個因素用以下5個評價等級來描述:低,較低,一般,較高和高。因素評價集Vi:
Vi={低,較低,一般,較高,高}
(4)
其中,i=1,2,…,7為因素指標,j=1,2,…,5為等級指標,vij表示第i個因素的第j個等級。
對綜合評價指標采用量化處理,給予衛星姿態控制系統各因素的每個評價等級一個相應的分值cj,等級1分值記為20,等級2記為21,等級3記為22,等級4記為23,等級5記為24。則因素評價等級對應的分值集C為:
C={c1,c2,c3,c4,c5}={1,2,4,8,16}
(5)
(2) 權值計算
可重構性指標因素之間重要性并不相同,需要給各因素賦予不同的權值,在缺乏樣本數據的情況下, 為了提高分配權值的可信度,采用層次分析法[14]。
1) 按照表1規則,由專家比較并給出可重構性指標因素之間的重要程度。
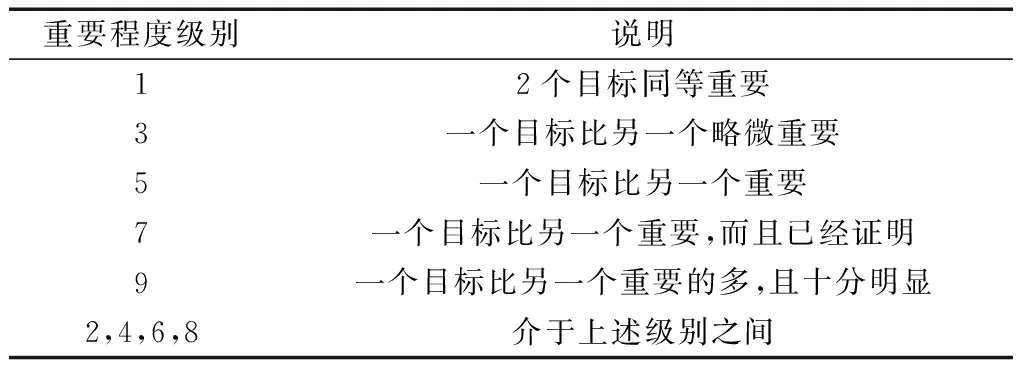
表1 重要程度級別的說明
經過比較兩兩因素之間的重要性,可以得到一個7×7的判斷矩陣A。 由于這一過程是將定性思維定量化的過程,有時難以給出精確的比較判斷,可能引起判斷的不一致。因而還需對判斷矩陣進行一致性檢驗。
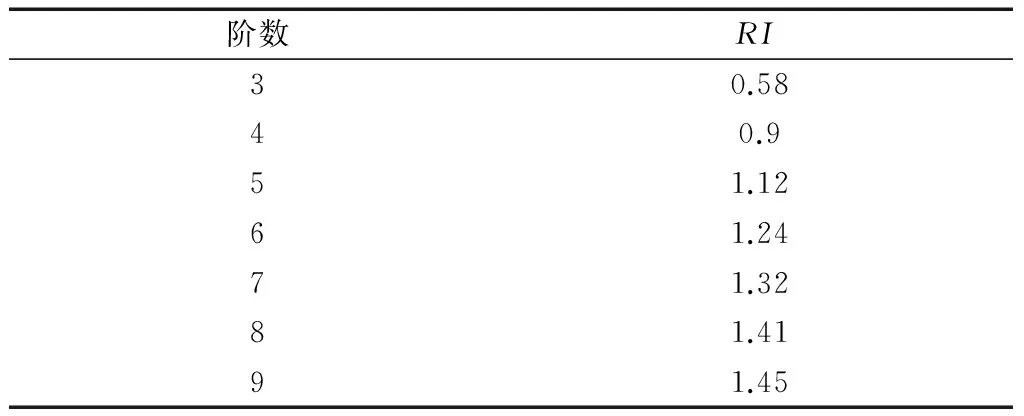
表2 A矩陣階數與RI
一般地,當CR<0.1 時,可以認為判斷矩陣具有滿意一致性,否則需要重新調整判斷矩陣。
2)求出權重
A中每行元素連乘開7次方:
(6)
(7)
3)得到權重矩陣
W=(w1,…,wi, …,w7)
(8)
(3) 因素評價矩陣
對可重構性指標第i個因素進行評價,評價對象隸屬于第j個等級的隸屬度為rij(i=1,2,…,7;j=1,2,…,5;0≤rij≤1),建立衛星姿態控制系統第k(k=1,2,3)個分系統的因素評判矩陣Dk:
(9)
評判矩陣Dk是通過若干專家對各個分系統在各個因素的不同等級上作0到1之間某個數值的隸屬度判斷,經統計處理后得到。
(4) 分配最小可重構度
由模糊變換可得衛星姿態控制系統第k個分系統的模糊評價集為:
Bk=W°Dk=(b1,b2,…,b7)
(10)式中,符號°為模糊算子,為了盡量保留全部的有用信息,采用實數加乘法計算模型M (*,+)進行計算:
(11)
將第k個分系統的模糊評價矩陣Bk和分值集C相乘,可得該分系統綜合評價分值dk:
dk=Bk·CT
(12)
設衛星姿態控制系統二重可重構度的目標值為R,則第k個分系統所分配的最小二重可重構度:
(13)
由上述步驟可得分系統的二重可重構度,在這個基礎上進行可重構性指標的再分配。
2.2 可重構性指標再分配
再分配是在初次分配的基礎上進行的,需要考慮約束條件,同時滿足系統的二重可重構度和分系統的最小可重構度的要求。由于啟發式算法[15-16]計算量少且能獲得接近系統最優性能的解,故在冗余分配中有一定的應用。綜合考慮能耗和性能指標的要求,所以在指標冗余分配中有一定應用。
在介紹所提方法之前,首先了解一下衛星姿態控制系統部件的安裝方式。為了便于研究可重構性指標分配方法,簡化系統模型,這里考慮的執行器和傳感器分別由多個單一的飛輪和陀螺組成。
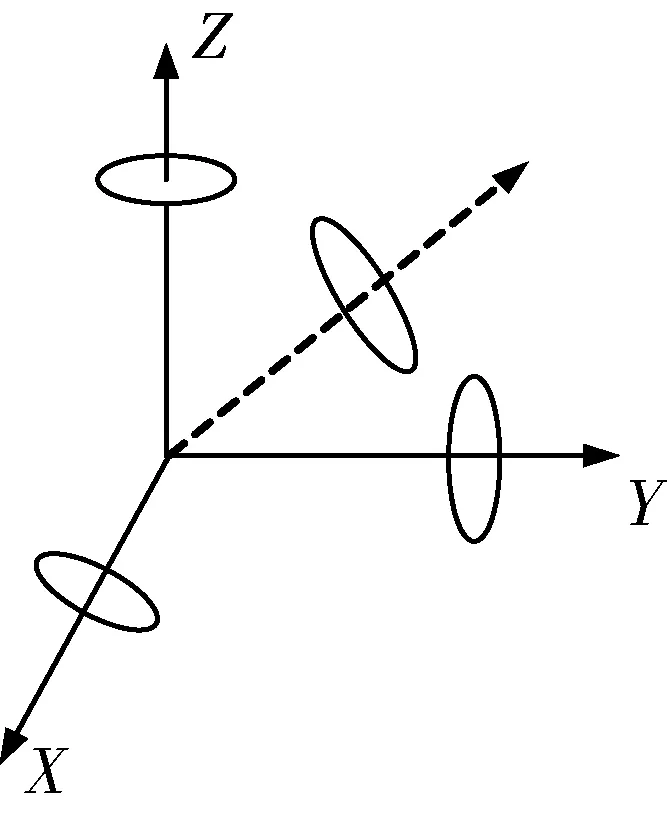
圖3 常見執行器配置方案
圖3是1個由4飛輪構成的執行器,XYZ軸是正裝軸,虛線軸表示斜裝軸(該軸的3個歐拉角在0°到90°之間)。由圖可知,飛輪的安裝方式有正裝和斜裝。所謂的正裝是指與空間的一個面相平行的安裝方式,顯而易見,斜裝是與3個平面都不平行的安裝方式。這2種方式對系統可重構性影響是不同的,在進行可重構性指標分配時應加以區分。陀螺與飛輪相似,也有2種安裝方式。然而,控制器與它們不同,這里所考慮的控制器是一個整體,換言之,組成控制器的單一元件就是它本身。不同控制器之間只采用并聯的安裝方式。
為了區分同一部件不同的安裝方式,用階段p表示不同安裝方式的部件,p=1,2,3,4,5分別表示控制器、正裝飛輪、斜裝飛輪、正裝陀螺和斜裝陀螺。這樣表示可以區別不同安裝方式的差別,并不影響分配結果。
對于一個由p個階段串聯組成的系統,基于啟發式算法的可重構性指標再分配流程如圖4所示。
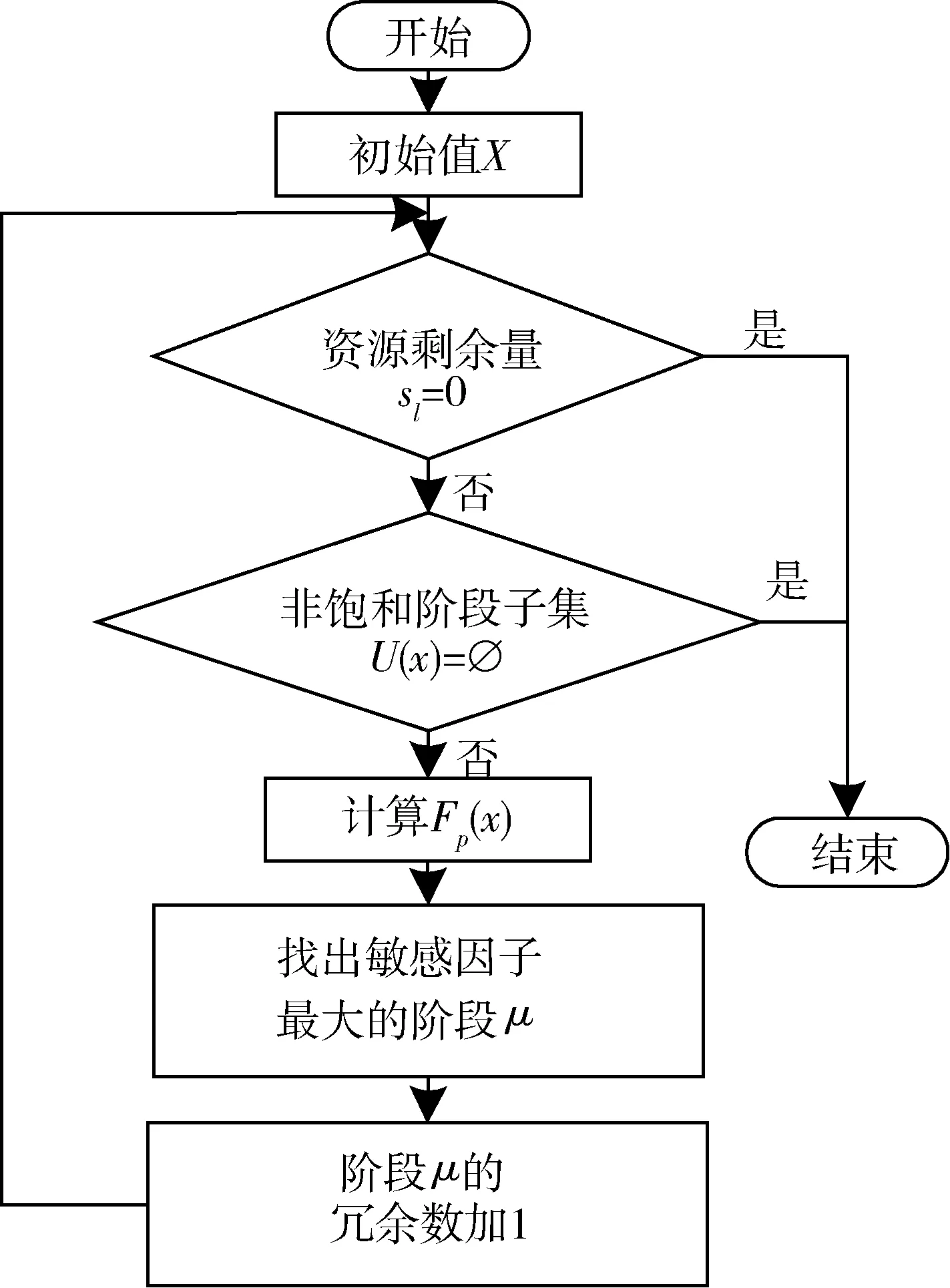
圖4 基于啟發式算法的可重構性指標分配流程圖
下面結合衛星姿態控制系統,將基于啟發式算法的可重構性指標再分配方法詳細闡述如下:
步驟0:為衛星姿態控制系統找到一個可行解x=(x1,x2,x3,x4,x5),向量中變量分別表示控制器、正裝飛輪、斜裝飛輪、正裝陀螺和斜裝陀螺的個數;
步驟2:令xμ=xμ+1,然后回到步驟1;
步驟3:求出的x即是衛星姿態控制系統的最優化解,計算結束。
其中,第p個階段的敏感因子為:
Fp(x)=[Rk(xp+1)-Rk(xp)]
(14)
注:在以往有約束條件的指標分配方法中,直接尋查法[17]計算量少并且能獲得接近系統最優值的解,所以應用廣泛,是最具有代表性的一種。為了驗證所提啟發式算法解決可重構性指標分配問題的有效性,將直接尋查法用于可重構性指標再分配,并將2種方法的分配結果作對比。基于直接尋查法的衛星姿態控制系統可重構性指標再分配的思路是:每次在系統中二重可重構度最小的一級上加入一個冗余單元,并檢查約束條件。在約束條件允許范圍內,通過一些列試探,可以使系統二重可重構度接近最大值,這是一種近似最優解。
約束條件為:sl≠0,l=1,2,3,其中,sl表示第l種資源剩余量。
3 衛星姿態控制系統算例仿真
如前文所述,衛星姿態控制系統是由控制器、執行器和傳感器等3部分組成的。本章將第2節中所提的可重構性指標分配方法用于衛星姿態控制系統進行仿真計算。
給定衛星姿態控制系統可重構度目標值:二重可重構度R1=0.8,該目標值是自己選取的,在實際系統的可重構性設計中,目標值是客戶/設計人員根據實際的任務需要設定的。部件基本屬性值:
(W1,W2,W3,W4,W5)=(1.5, 2.5, 2.5, 2, 2)
(C1,C2,C3,C4,C5)=(2, 3, 3, 1.5, 1.5)
(E1,E2,E3,E4,E5)=(3, 0.5, 1.5, 1, 2)
其中,W表示部件重量,C表示部件成本,E表示部件能耗。約束條件:b1=26,b2=30,b3=25。要求衛星姿態控制系統實現二重故障重構時,不欠驅動。
3.1 可重構性指標初次分配
首先用模糊綜合評價法將衛星姿態控制系統的二重可重構度目標值分配到分系統。
1)由2.1節可寫出因素集U、因素評價Vi和分值集C:
U={重量,經濟,能耗,可靠性,控制精度,
故障可診斷性,重構風險性},
Vi={低,較低,一般,較高,高},C={1,2,4,8,16}。
2)確定因素的權值以及因素的隸屬值。由專家給出可重構性指標因素之間的重要關系,如表3所示。由表3直接寫出判斷矩陣:
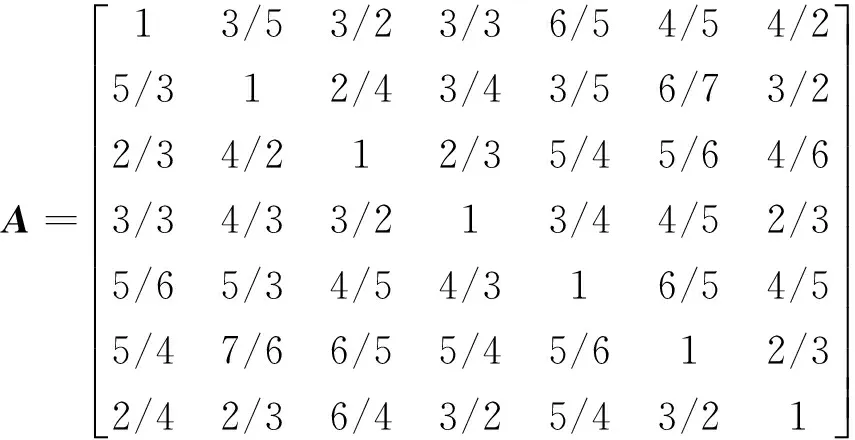
表3 可重構性指標因素之間的重要關系
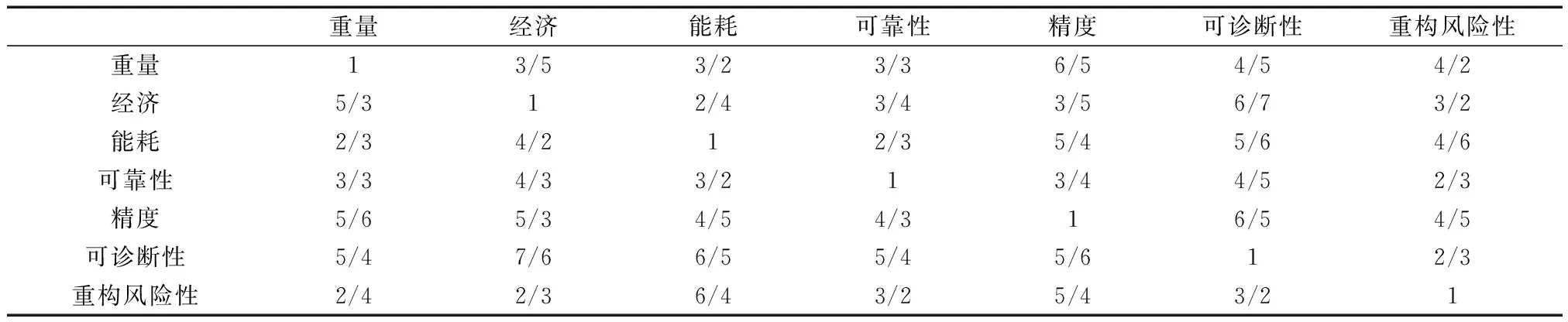
重量經濟能耗可靠性精度可診斷性重構風險性重量13/53/23/36/54/54/2經濟5/312/43/43/56/73/2能耗2/34/212/35/45/64/6可靠性3/34/33/213/44/52/3精度5/65/34/54/316/54/5可診斷性5/47/66/55/45/612/3重構風險性2/42/36/43/25/43/21
通過2.1節,計算可得可重構性指標各因素的權重矩陣為:
W=[0.1542 0.1285 0.1331 0.1381 0.1499 0.1466 0.1497]。
給出衛星姿態控制系統的控制器、執行器和傳感器的評價矩陣分別為:
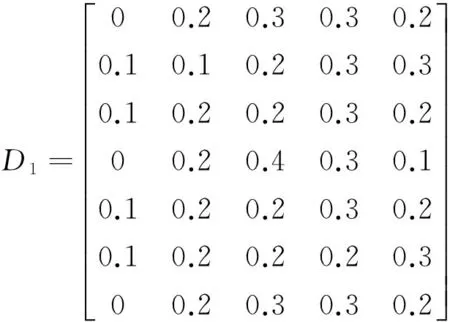
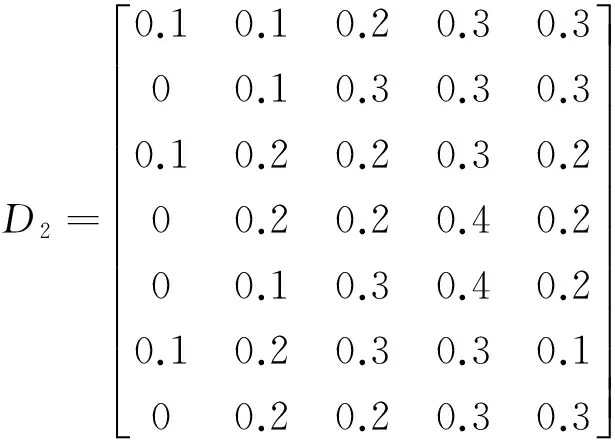
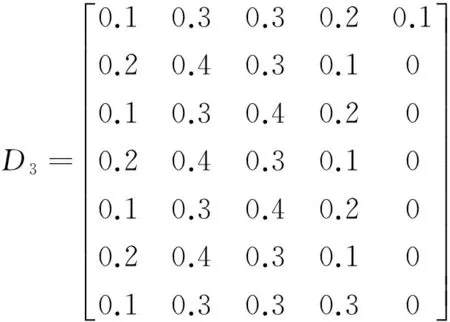
通過2.1節步驟,運算可得衛星姿態控制系統的控制器、執行器和傳感器的最小二重可重構度為:
=0.3069,R2=0.3263,R3=0.1669。
由上述結果可以看出,初次分配得到3個不相同的分系統二重可重構度,體現了不同分系統在重構任務中不同的重要性。
3.2 可重構性指標再分配
衛星需要控制3個方向的姿態,而一個飛輪在不欠驅動的情況下,只能控制1個方向,所以至少需要3個飛輪。陀螺與飛輪原理相同,至少需要3個陀螺才能不欠驅動。
根據2.2節,直接寫出系統5個階段的最低配置為x=(1,3,0,3,0)。相應地,資源剩余量s1=13,s2=14.5,s3=12.5。

當p∈U(x),[Rk(xp+1)-Rk(xp)]的值:


因此,α=0.5時所有非飽和分系統的敏感因子為:F1(x)=1.0417,F2(x)=1.1250,F3(x)=2.2500,F4(x)=1.3333,F5(x)=2.6667。
由于F5為最大的敏感因子,所以對傳感器增加1個斜裝陀螺,對于α=0.5的其它迭代結果由表4給出。
當α=0.5,通過新的啟發式算法得到系統最優配置是(3,3,2,4,1)。相應的配置如圖5所示。
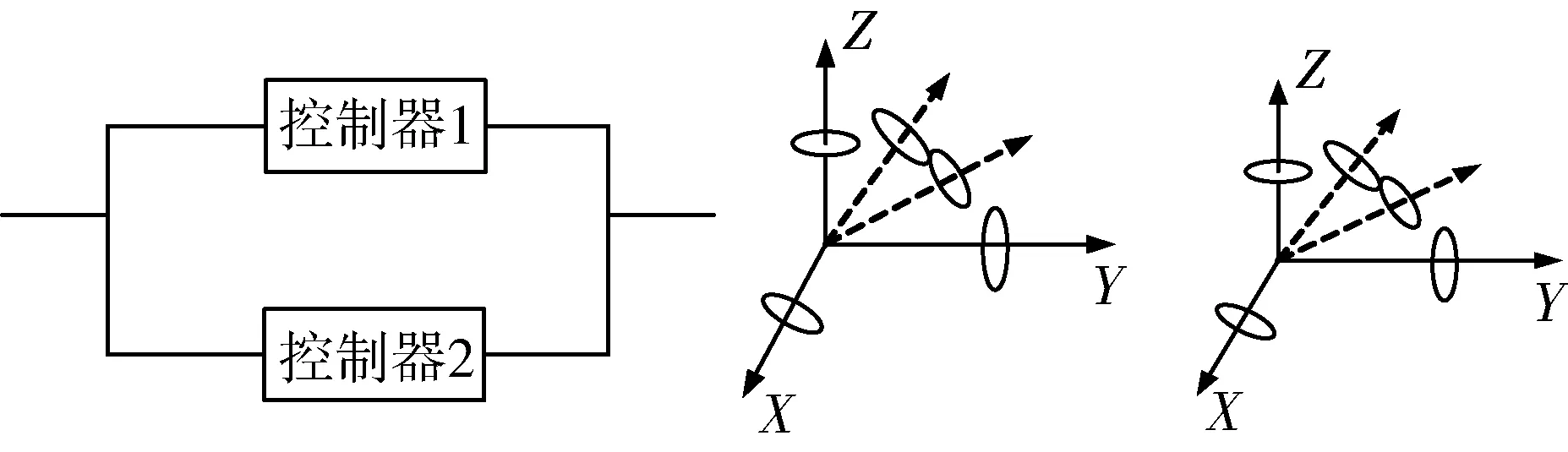
圖5 控制器、執行器和傳感器配置方案
驗證分配結果的有效性:

從分配結果看出,該配置方案的二重可重構度R*=1,大于系統的目標值0.8,且各分系統的二重可重構度大于初次分配的最小二重可重構度,表明方案能夠滿足系統的可重構性要求。
(表4中* 表示敏感因子的最大值;b 表示飽和階段。)
注:該實例中,基于直接尋查法的可重構性指標再分配的計算步驟為:首先取初始解為x=(1,3,0,3,0),計算3個分系統的二重可重構度:R1=0,R2=0,R3=0。由于這3個分系統的二重可重構度相等,所以依據直接尋查法的思想,對任何分系統增加冗余部件都是一樣的,這里首先選擇增加1個控制器。此時:s1=11.5,s2=12.5,s3=9.5,重復這個步驟,可以發現3個分系統二重可重構度相等,選擇增加1個控制器,s1=10,s2=10.5,s3=6.5,繼續上述過程,當s1=1,s2=1.5,s3=1.5時,增加任何一個分系統的部件都會超出資源剩余量,計算結束,得到系統最優配置為x=(3,4,1,4,1)。
從上述分配過程可以看到,直接尋查法能夠滿足系統指標分配基本要求,但是所得系統二重可重構度小于所提啟發式算法的結果。原因在于直接尋查法在考慮可重構度增量時,并沒有考慮資源的最優化,而所提啟發式算法的敏感因子包含了部件的資源消耗與剩余資源的關系,通過這個環節,可以使得資源利用最大化,并最終在約束條件內獲得二重可重構度最大的配置,這就顯示了新的啟發式算法的優越性。
4 結束語
針對衛星姿態控制系統的可重構性指標分配問題,將系統分配過程分為初次分配和再分配,利用模糊綜合評價法進行可重構性指標的初次分配,很好地解決了衛星姿態控制系統可重構性數據統計不足的特點,并根據專家評分等方法給各分系統分配不同的最小可重構度,從而得到與重構重要性相符的初次分配結果。啟發式方法用于衛星姿態控制系統的可重構性指標再分配,能有效地處理串聯系統冗余分配的問題,通過比較不同方案的敏感因子,得到滿足系統可重構度的配置方案,相比于直接尋查法,它能更好地優化配置系統的資源,同時它的計算量較少,在實際工程領域具有一定的應用價值。
[1] Cyrus D Jilla,David W Miller. Satellite Design: Past, Present and Future[J]. International Journal of Small Satellite Engineering,12 February 1997:234-240.
[2] 羅曉平, 黃海.自適應結構控制及其空間應用[J]. 航天控制,2005,23(2):47-53.(LUO Xiaoping, HUANG Hai. Adaptive Structural Control and Its Applications in Space[J].Aerospace Control, 2005, 23(2): 47-53.)
[3] Sharma R, Tewari A. Optimal Nonlinear Tracking of Spacecraft Attitude Maneuvers[J]. IEEE Transactions on Control Systems Technology, 2004, 12(5): 677-682.
[4] Dalsmo M, Egeland O. State Feedback H∞ Suboptimal Control of a Rigid Spacecraft[J]. IEEE Transactions on Automatic Control, 1997, 42(8): 1186-1191.
[5] 孫德波, 段廣仁, 王愛華.飛行器視覺導航的 H∞ 濾波[J].航天控制, 2005, 23(3): 4-8.(SUN Debo, DUAN Guangren, WANG Aihua. The H∞ Filter forAerocraft Vision Navigation[J]. Aerospace Control, 2005, 23(3) : 4-8.)
[6] Hu Q L. Robust Adaptive Sliding Mode Attitude Maneuvering and Vibration Damping of Three-axis-stabilized Flexible Spacecraft with Actuator Saturation Limits[J].Nonlinear Dynamics, 2009, 55(4): 301-321.
[7] Hao Yang,Bin Jiang, Marcel Staroswiecki.Fault Recoverability Analysis of Switched Systems[J].International Journal of Systems Science, 2012, 43(3), 535- 542 .
[8] 王駿, 陳欣, 楊浩.基于神經網絡與自適應控制的系統重構方法[J].航天控制,2006, 24(2): 9-13.(WANG Jun, CHEN Xin, YANG Hao. A Method of System Reconfiguration Based on Neural Network and Adaptive Control[J]. Aerospace Control, 2006, 24(2): 9-13.)
[9] 李培根,張潔.敏捷化智能制造系統的重構與控制[M].北京:機械工業出版社,2003.(Li Peigen, Zhang Jie. Reconstruction and Control of Agile Intelligent Manufacturing Systems[M]. Beijing: Mechanical Industry Press, 2003.)
[10] Staroswiecki M. On Reconfigurability with Respect to Actuator Failures[C]. Proceedings of the 15th Triennial World Congress, IFAC 2002, Barcelona, Spain. 2002: 775-780 .
[11] 李士勇.工程模糊數學及應用[M].哈爾濱:哈爾濱工業大學出版社,2004.(Li Shiyong.Engineering Fuzzy Mathematics and Application[M]. Harbin: Harbin Institute of Technology Press, 2004.)
[12] Zhen Y, Hua W, Li Z L, et al. Researching the Comprehensive Use of Fuzzy Comprehensive Evaluation and Markov Chain[C]. IEEE International Symposium on Medicine & Education, 2009, 1: 476-479.
[13] Sharma J, Venkateswaran K V. A Direct Method for Maximizing the System Reliability[J]. IEEE Transactions on Reliability, 1971, 20(4): 256-259.
[14] Saaty T L. Analytic Hierarchy Process[J]. Encyclopedia of Biostatistics, 2005.
[15] Aggarwal K K. Redundancy Optimization in General Systems[J]. Reliability, IEEE Transactions on 1976, 25(5): 330-332.
[16] Nakagawa Y, Nakashima K. A Heuristic Method for Determining Optimal Reliability Allocation[J]. IEEE Transactions on Reliability, 1977, 26(3): 156-161.
[17] Chen C L, Chen N. Direct Search Method for Solving Economic Dispatch Problem Considering Transmission Capacity Constraints[J]. Power Systems, IEEE Transactions on, 2001, 16(4): 764-769.
Reconfigurable Allocation of Satellite Attitude Control System
XIANG Changyi1YANG Hao1CHEN Yuehua2JIANG Bin1LIU Chengrui3,4
1. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2. Academy of Frontier Science, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 3. Beijing Institute of Control Engineering, Beijing 200233, China 4. Science and Technology on Space Intelligent Control Laboratory, Beijing 200233, China
Areconfigurableallocationwithconstraintsforthesatelliteattitudecontrolsystem,ispresentedinthepaper.Thisallocationcanbedividedintoprimaryandsecondaryallocationaccordingtothefeatureofreconfigurabilitydatadeficiencyandtherequirementsofresourceoptimization.Theprimaryallocationbasedonfuzzycomprehensiveevaluationmethodisproposedinviewoftheuncertaintyofindicatorsandambiguityofhumanknowledge.Thesimulationresultsshowtheeffectivenessandfeasibilityoftheproposedmethod.Aimedatapproachingtheoptimalsolution,anewheuristicalgorithmisproposed.Thenthesecondaryallocationofthesystemuseboththenewheuristicalgorithmandthedirectsearchmethod.Thesimulationresultsshowthattheformermethodismuchmoreeffectivewithlowcomputationloadsandaccurateresults.
Reconfigurableallocation;Satelliteattitudecontrolsystem;Fuzzycomprehensiveevaluationmethod;Heuristicalgorithm
*國家自然科學基金(61203091,61104116,61273171);上海航天科技創新基金(SAST201234);中央高校基本科研業務費專項資金 (NS2012069)
2013-03-12
項昌毅(1988-),男,江西人,碩士研究生,主要研究方向為故障診斷與容錯控制;楊 浩(1982-),男,江蘇人,副教授,主要研究方向為故障診斷與容錯控制;程月華(1977-),女,安徽人,副研究員,主要研究方向為小衛星姿態控制、故障診斷與容錯控制;姜 斌(1966-),男,江西人,教授,博士研究生導師,主要研究方向為故障診斷與容錯控制;劉成瑞(1987-),男,河北人,高級工程師,主要研究方向為航天器故障診斷與可靠性研究。
TP277; V448.22
A
1006-3242(2014)02-0046-07
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
鐵道通信信號(2020年9期)2020-02-06 09:15:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
汽車維護與修理(2015年2期)2015-02-28 12:15:39
