改進(jìn)的三角高程法在跨海高程傳遞中的應(yīng)用
2014-08-15 03:07:36徐亞明王代雄潘正風(fēng)
測(cè)繪通報(bào) 2014年4期
徐亞明,施 斌,王代雄,潘正風(fēng)
(1. 武漢大學(xué) 測(cè)繪學(xué)院,湖北 武漢 430079; 2. 精密工程與工業(yè)測(cè)量國(guó)家測(cè)繪地理信息局重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430079)
一、引 言
跨海高程傳遞是建立國(guó)家統(tǒng)一的陸海高程基準(zhǔn)框架網(wǎng)的一種重要手段。目前,跨海高程傳遞的方法通常有三角高程測(cè)量法、短期驗(yàn)潮法、GPS水準(zhǔn)法和重力測(cè)量法。短期驗(yàn)潮法是根據(jù)一定海域內(nèi)陸海潮汐一致的特點(diǎn),通過(guò)觀測(cè)陸海各自距水尺零點(diǎn)的潮位高并求取高差,實(shí)現(xiàn)陸海高程的傳遞,其觀測(cè)精度與時(shí)間成正相關(guān)。GPS水準(zhǔn)法利用靜態(tài)測(cè)量獲得的高精度大地高差與似大地水準(zhǔn)面差距之差來(lái)傳遞高程[1]。該方法相對(duì)實(shí)施周期短且方便實(shí)用,但前提是需要高精度的局部似大地水準(zhǔn)面模型。李建成等已成功利用GPS觀測(cè)所得的相對(duì)大地高差,聯(lián)合精確的似大地水準(zhǔn)面模型,將黃海高程傳遞到了距離上海30 km的洋山島上,其精度與獨(dú)立的潮位觀測(cè)差值為厘米級(jí),與三等水準(zhǔn)測(cè)量相差為毫米級(jí)[1]。重力測(cè)量法應(yīng)用重力位與高程的關(guān)系,計(jì)算陸地高程起算點(diǎn)的重力位值,根據(jù)跨海重力位差計(jì)算公式和海洋重力場(chǎng)資料計(jì)算出海域某點(diǎn)重力位值,確定該點(diǎn)相對(duì)陸地高程基準(zhǔn)的高程值,實(shí)現(xiàn)跨海高程基準(zhǔn)的精確傳遞。該方法可以快捷準(zhǔn)確地將海域GPS大地高轉(zhuǎn)化為1985國(guó)家高程系統(tǒng)的高程值,精度優(yōu)于10 cm[2]。
三角高程測(cè)量是跨海高程傳遞中一種應(yīng)用比較廣泛的技術(shù)。其基本思想是根據(jù)由已知高程點(diǎn)向目標(biāo)點(diǎn)觀測(cè)所得的豎角和水平距離,計(jì)算兩點(diǎn)間的高差,從而進(jìn)行高程的傳遞[3]。歐陽(yáng)桂崇等在一段10 km長(zhǎng)的跨海段高程傳遞中,利用三角高程測(cè)量獲得的結(jié)果與水準(zhǔn)測(cè)量、重力測(cè)量、GPS水準(zhǔn)及天文重力水準(zhǔn)測(cè)量的符合精度均小于5 mm/km,達(dá)到二等水準(zhǔn)要求。三角高程測(cè)量的精度主要受大氣折光影響,在跨海高程傳遞中,《國(guó)家一、二等水準(zhǔn)測(cè)量規(guī)范》(GB/T 12897—2006)規(guī)定采用大地四邊形結(jié)構(gòu),利用同步對(duì)向觀測(cè)方式來(lái)消除大氣折光誤差[3]。本文在此規(guī)范的基礎(chǔ)上,提出一種線形結(jié)構(gòu)的觀測(cè)方式結(jié)合相對(duì)嚴(yán)格的同步對(duì)向觀測(cè),降低了原方式的復(fù)雜程度和觀測(cè)量,取得了較好的效果。
二、精密三角高程測(cè)量原理
精密三角高程測(cè)量在三角高程測(cè)量基本原理的基礎(chǔ)上,采用兩臺(tái)帶有自動(dòng)照準(zhǔn)(ATR)功能的高精度全站儀,經(jīng)改裝后,照準(zhǔn)棱鏡固定在全站儀的把手上,同時(shí)進(jìn)行對(duì)向觀測(cè),其高差計(jì)算公式如下[4]
hAB=0.5×[(SABtanαAB-SABtanαBA)-
(1)

hAB=0.5×(SABtanαAB-SABtanαBA)
(2)
另外,在起始站和結(jié)束站上觀測(cè)的高差計(jì)算公式為
hAB=SABtanαAB
(3)
三、測(cè)量方案
1. 點(diǎn)位布設(shè)
觀測(cè)點(diǎn)位布設(shè)如圖1所示。在測(cè)線S1—S2之間選擇1、2、3三個(gè)臨時(shí)點(diǎn)作為全站儀設(shè)站點(diǎn)。1點(diǎn)離S1點(diǎn)的距離及3點(diǎn)離S2點(diǎn)的距離限制為5~20 m,1、2點(diǎn)之間為跨海對(duì)向觀測(cè)邊,為了使對(duì)向觀測(cè)邊數(shù)是偶數(shù),需設(shè)置2、3點(diǎn)之間為過(guò)渡對(duì)向觀測(cè)邊。另外,為了保證觀測(cè)質(zhì)量,要求1、2點(diǎn)之間通視良好,設(shè)置在較高處,使視線高出水面(一般在10 m以上)。

圖1 觀測(cè)點(diǎn)布設(shè)圖
2. 儀器選用及改裝
根據(jù)式(2)、式(3)可知,測(cè)量的精度取決于對(duì)向觀測(cè)的平距值SAB及豎角觀測(cè)值αAB、αBA的觀測(cè)精度,由于跨海高程傳遞中豎角都非常小,SAB的測(cè)量精度很容易控制在1 cm以內(nèi),這樣SAB的精度對(duì)最終高差的影響很小,可以不予考慮。因此,跨海高程傳遞測(cè)量的精度主要取決于測(cè)量?jī)x器的豎角觀測(cè)精度。本次選用的Leica TM30高精度智能全站儀測(cè)角精度為±0.5″,測(cè)距精度為±(1 mm+1×10-6D),在ATR模式下測(cè)量范圍為3000 m。精密三角高程測(cè)量需要對(duì)儀器進(jìn)行必要的改裝。改裝后的儀器如圖2所示,在TM30的把手位置安裝圓棱鏡,用于進(jìn)行跨海段的對(duì)向觀測(cè)。
3. 與傳統(tǒng)方法比較
若按照傳統(tǒng)的測(cè)距三角高程測(cè)量方式,根據(jù)規(guī)范要求需要布設(shè)成大地四邊形,如圖3(a)所示,兩岸共需埋設(shè)4個(gè)固定點(diǎn)[4],觀測(cè)程序較為復(fù)雜。同時(shí),跨海段觀測(cè)視線為大地四邊形的兩條對(duì)邊,各觀測(cè)邊將受到不同大氣折光的影響,難以直接消除。
而采用改進(jìn)后的線性結(jié)構(gòu)布設(shè)方式(如圖3(b)所示),只需布設(shè)兩個(gè)固定點(diǎn),觀測(cè)程序?qū)⒃诤艽蟪潭壬系玫胶?jiǎn)化,且觀測(cè)視線可近似認(rèn)為是對(duì)向觀測(cè),根據(jù)式(1)、式(2)相關(guān)理論,可以快速地消除大氣折光的影響。

圖2 改裝后的TM30全站儀
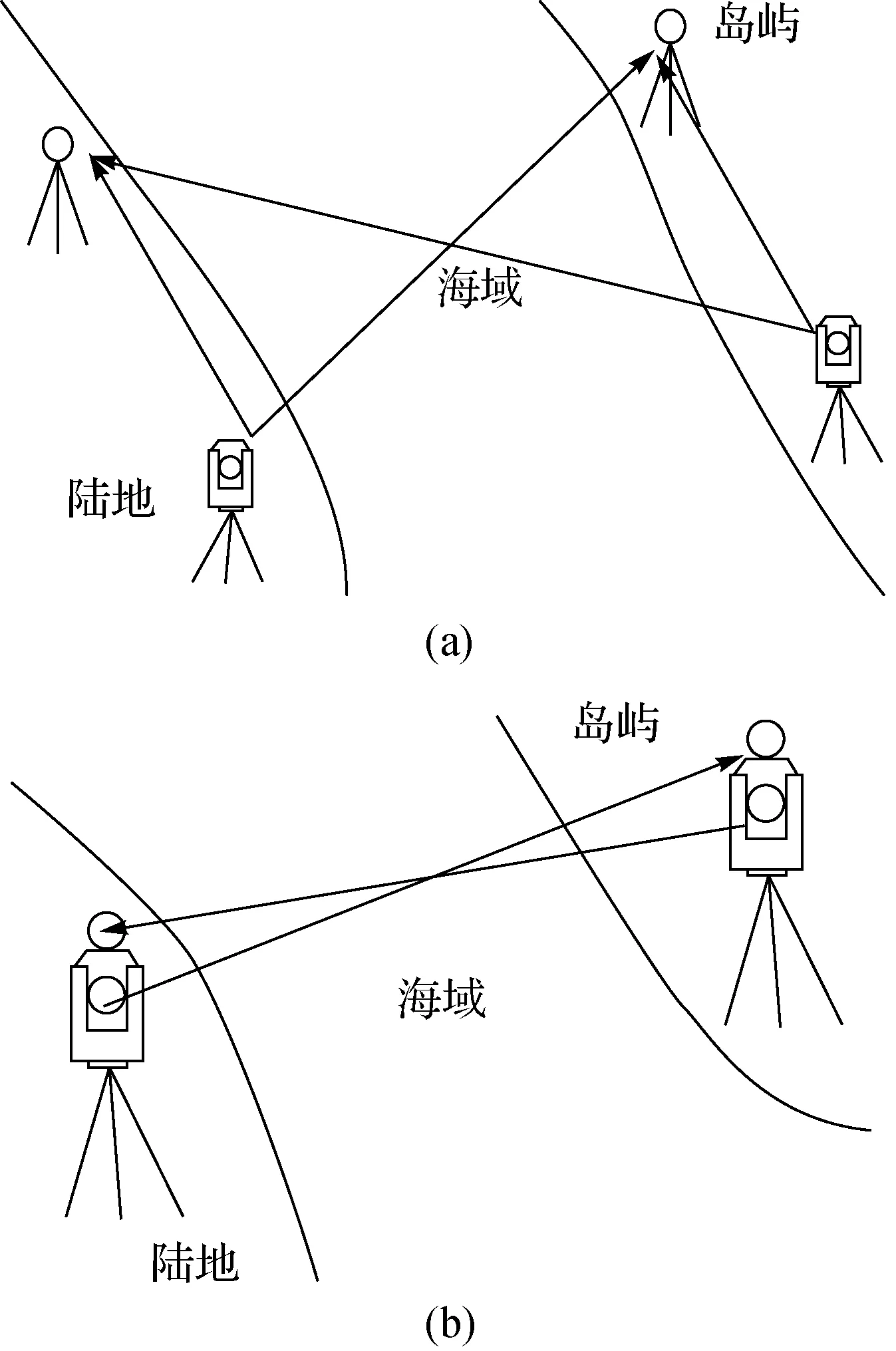
圖3 觀測(cè)示意圖
4. 觀測(cè)方案
本次測(cè)量利用TM30的ATR功能,無(wú)人工照準(zhǔn)測(cè)量。為保證觀測(cè)質(zhì)量,根據(jù)不同的氣象條件,制訂不同的對(duì)向觀測(cè)方法,見(jiàn)表1。

表1 不同氣象條件下的觀測(cè)方案

續(xù)表1
此外,為減小測(cè)角中誤差,一般采用多測(cè)回的方法。實(shí)際觀測(cè)中每組觀測(cè)4測(cè)回,保證每組的測(cè)角中誤差都在0.5″之內(nèi)。
(1) 起點(diǎn)觀測(cè)
在1點(diǎn)架設(shè)全站儀,在S1點(diǎn)上架設(shè)棱鏡桿,每個(gè)時(shí)段觀測(cè)一組平距及豎角值。另外,測(cè)距前需觀測(cè)溫度與氣壓。
(2) 跨海段觀測(cè)
跨海段對(duì)向觀測(cè)采用距離觀測(cè)與豎角觀測(cè)分開進(jìn)行的方式進(jìn)行測(cè)量。在每個(gè)測(cè)量時(shí)段開始之前及結(jié)束之后進(jìn)行距離觀測(cè),采用正倒鏡測(cè)量的模式,取前后8次測(cè)量的平均值。
豎角的觀測(cè)按照以下步驟進(jìn)行:
1) 在1、2點(diǎn)上分別架設(shè)全站儀進(jìn)行對(duì)向觀測(cè)。按照表1所示的方案進(jìn)行一個(gè)時(shí)段的觀測(cè)。對(duì)向觀測(cè)應(yīng)按照嚴(yán)格的“同步”觀測(cè)進(jìn)行,即1、2點(diǎn)的觀測(cè)間隔限制在5 min之內(nèi)。
2) 若分上下午兩時(shí)段觀測(cè),則在第二個(gè)時(shí)段開始前重新架設(shè)1點(diǎn)的全站儀(主要是儀器高的改變),改變對(duì)向觀測(cè)順序,按方案1進(jìn)行觀測(cè)。
為保證時(shí)間上的一致性,最先觀測(cè)的儀器多測(cè)一組,計(jì)算時(shí),利用舒勒平均值原理,先將最先觀測(cè)的5組兩組之間取平均,然后對(duì)觀測(cè)值取平均。
(3) 過(guò)渡邊對(duì)向觀測(cè)
將1點(diǎn)上的全站儀搬到3點(diǎn)架設(shè),進(jìn)行2、3點(diǎn)的對(duì)向觀測(cè),觀測(cè)4個(gè)測(cè)回,對(duì)向觀測(cè)共8個(gè)測(cè)回。變化儀器高,進(jìn)行2、3點(diǎn)間的返測(cè)。
(4) 末點(diǎn)觀測(cè)
將S1上的棱鏡桿移動(dòng)到S2上,保持棱鏡的高度不變,在3點(diǎn)上對(duì)S2進(jìn)行觀測(cè)。在過(guò)渡邊對(duì)向觀測(cè)變化儀器高后,同樣進(jìn)行3、S2點(diǎn)間的返測(cè)。
四、數(shù)據(jù)處理及精度分析
1. 限差分析
根據(jù)《國(guó)家一、二等水準(zhǔn)測(cè)量規(guī)范》(GB/T 12897—2006)的有關(guān)規(guī)定,二等水準(zhǔn)測(cè)量每千米中誤差Mw為2 mm,跨海段的總長(zhǎng)為L(zhǎng),高差測(cè)量的中誤差應(yīng)不大于
該測(cè)量為8組,取其平均值,則每組測(cè)量的中誤差應(yīng)不大于
兩組之間允許差值(中誤差)為
2. 數(shù)據(jù)分析
項(xiàng)目共進(jìn)行了兩跨海段高程的傳遞,測(cè)段一、二的高差觀測(cè)數(shù)據(jù)見(jiàn)表2。其中,測(cè)段一數(shù)據(jù)為一個(gè)時(shí)段觀測(cè)模式所得;測(cè)段二數(shù)據(jù)分為上、下午兩個(gè)時(shí)段觀測(cè)模式所得。

表2 高差觀測(cè)數(shù)據(jù)
本次測(cè)量中測(cè)段一的長(zhǎng)度為2.469 km,8組高差平均值為-3.449 0 m;測(cè)段二的長(zhǎng)度為1.818 km,8組高差平均值為5.251 1 m。根據(jù)式(4)—式(6)計(jì)算各項(xiàng)限差與實(shí)際值相比較,結(jié)果見(jiàn)表3。
可以看出,測(cè)段一、二不論是高差中誤差還是各組觀測(cè)值間最大互差均小于限差規(guī)定的值,兩個(gè)測(cè)段均達(dá)到二等水準(zhǔn)的要求。

表3 限差與實(shí)際比較 mm
五、結(jié)束語(yǔ)
本文在國(guó)家規(guī)范的基礎(chǔ)上,提出了一種線形觀測(cè)結(jié)構(gòu),同時(shí)選用高精度的測(cè)量機(jī)器人進(jìn)行相對(duì)嚴(yán)格的對(duì)向觀測(cè),削弱了大氣折光的影響,采用偶數(shù)站的測(cè)量,避免了量取儀器高和覘標(biāo)高的環(huán)節(jié),簡(jiǎn)化了作業(yè)流程,提高了作業(yè)效率。最后對(duì)該方法在二等水準(zhǔn)技術(shù)指標(biāo)下進(jìn)行了分析,證明精度達(dá)到二等水準(zhǔn)的要求。
參考文獻(xiàn):
[1] 李建成,姜衛(wèi)平.長(zhǎng)距離跨海高程基準(zhǔn)傳遞方法的研究[J]. 武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2001,26(6): 514-517.
[2] 鮑李峰,許厚澤,陸洋,等.利用重力位差實(shí)現(xiàn)跨海高程基準(zhǔn)傳遞:中國(guó),201110071065.1[P].2011-11-02.
[3] 國(guó)家測(cè)繪局.GB/T 12897—2006 國(guó)家一二等水準(zhǔn)測(cè)量規(guī)范[S].北京:中國(guó)標(biāo)準(zhǔn)出版社,2006.
[4] 潘正風(fēng),楊正堯,程效軍,等.數(shù)字測(cè)圖原理與方法[M].武漢:武漢大學(xué)出版社,2004.
[5] 劉冠蘭,李東宇,丁文宏.精密三角高程測(cè)量在寬水域跨河水準(zhǔn)中的應(yīng)用[J]. 工程勘察,2010,38(10):71-74.
[6] 王知章,潘正風(fēng),劉冠蘭. 三角高程測(cè)量在高鐵特大橋無(wú)碴軌道施工測(cè)量中的應(yīng)用[J].工程勘察,2009,37(6):66-68.
猜你喜歡
北京測(cè)繪(2020年12期)2020-12-29 01:37:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
電測(cè)與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08