LidarStation在浙江省海岸帶區域的DEM生產應用試驗
2014-08-15 01:39:10毛衛華徐勝攀左志權
測繪通報 2014年4期
毛衛華,徐勝攀,左志權,黃 河
(1. 浙江省測繪科學技術研究院,浙江 杭州 310012; 2. 中國測繪科學研究院,北京 100830)
一、引 言
與傳統的航空攝影測量系統相比,機載LiDAR可以直接獲取高精度的地面點三維坐標,具有數據產品生產周期短、自動化程度高、受天氣影響小、可以穿透植被等優點,特別適合于進行DEM的生產。目前國際上實用化程度較高的機載LiDAR數據處理軟件是TerraSolid,但它在手工編輯時采用二維方式,降低了三維點云的可視化效果,使得點云編輯不直觀,同時也不便于檢查點云編輯效果。
本文介紹基于國產LidarStation機載激光雷達數據處理軟件的三維可視化點云編輯技術方法,討論在地形、地物比較復雜的情況下,LidarStation三維可視化編輯在DEM生產中的應用,并與主流軟件TerraSolid相比較,說明其特色。
二、LidarStation軟件簡介
LidarStation是由中國測繪科學研究院研制的一款機載激光雷達數據專業處理軟件,由LAS文件預處理模塊、工程管理模塊、可視化與手工編輯模塊、綜合應用模塊等組成,提供了機載LiDAR點云航帶平差、點云二維/三維可視化、對點云的查詢與手工編輯、斷面分析、粗差剔除、濾波、DEM/DSM生成、等高線生成等多種功能。軟件良好的操作界面、三維環境下對點云的直觀編輯、支持對海量LiDAR點云的流式濾波與DEM/DSM一體化生成等,使得軟件具有良好的可操作性和較高的數據處理效率,在同類軟件中體現出一定的特色和優勢。
三、LidarStation的三維可視化編輯
1. 三維可視化編輯基本原理
點云三維可視化編輯需要解決的核心問題是點云拾取。拾取是交互式圖形系統的一項重要功能,是對圖形對象進行增、刪、改等操作的基礎。在三維點云可視化系統中,點云拾取問題就是利用鼠標實時位置捕捉點對象,或利用鼠標所確定的多邊形確定落在該多邊形內的點集。點云拾取可采用射線交叉法,在三維空間對點云進行相交檢測;也可將三維點云映射到二維屏幕上,對屏幕上的點云圖像與拾取點或拾取多邊形求交。為加速求交過程,可對三維點云按照一定方法進行層次組織,只對存在交集的層次結點進行進一步判斷。
2. 三維可視化編輯基本方法
基于三維點云拾取,可以很方便地對點云進行直接編輯,將點由源類(Source Class)分入指定的目標類(Target Class)。可通過LidarStation提供的三維窗口中的可視化編輯工具直接進行,也可對選定區域的點云作剖面,在剖面窗口中,進一步利用點云高程、斜率等信息進行分類。在進行三維點云分類編輯時,可對點云建立Delaunay三角網,并添加光照渲染,借此可以了解地面數字高程模型生成的初步效果和光滑狀況,以便實時檢測編輯質量,對存在問題的地方進一步編輯,從而達到更好的分類效果。
3. 點云三維實時顯示及編輯方式與TerraSolid軟件編輯模式對比
LidarStation軟件克服了傳統LiDAR數據處理軟件存在的三維可視化效果差、三維實時編輯能力差、編輯操作繁瑣的問題,對點云三維可視化與三維環境實時編輯方式進行了重點攻關,解決了三維環境實時顯示與編輯中的關鍵問題。軟件采用四叉樹構建三維點云空間索引,并采用頂點緩沖區對象(VBO)與著色器(Shader)實現三維點云實時可視化與復雜效果渲染,通過海量點云拾取算法實現對三維點云的交互式編輯。同時軟件提供了三維編輯環境下點云不同可視化效果,實現了按照高程、類別、條帶、強度等的多種展示方式,與TerraSolid軟件的對比效果如圖1所示。
四、LidarStation DEM生產試驗
1. 試驗區介紹
試驗區位于浙江省某海島城市。島內植被密集、地形復雜,并有湖泊、海域、港口等,區域面積為1700 m×1700 m,地形高差約為50 m。機載LiDAR數據采集傳感器為ALS60。圖2為該測區的航測數據示意圖。
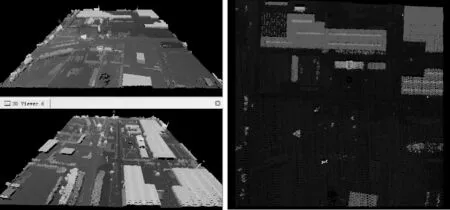
圖1 LidarStation軟件(左)和TerraSolid軟件(右)點云顯示效果展示

圖2 測區航測數據示意圖
2. LidarStation DEM生產過程
對采集的點云數據首先進行粗差剔除,過濾掉由于電路傳輸異常、漫反射、飛鳥等產生的噪聲點;再進行自動化點云濾波,將三維點云分類為地面點和地物點。對經過自動化濾波后的點云,采用LidarStation的三維可視化與編輯模塊進行精細手工編輯,生成高質量地面點云;對地面點云建立Delaunay三角網并柵格化,便能生成高質量DEM。 圖3為LidarStation的DEM生成流程圖,圖4為基于此流程的針對測區數據的各階段生成成果,以及局部地面數據Delaunay三角網可視化效果。
由圖4可以看出,原始點云數據的植被、建筑物等都得到有效剔除,DEM表現光滑、質量良好。三維可視化編輯在DEM生產中發揮了關鍵作用,使得DEM生產取得較好的效果。
五、結束語
本文以浙江沿海某海島城市的機載LiDAR數據為例,基于中國測繪科學研究院研制的軟件LidarStation進行試驗,列舉了利用機載LiDAR數據生成高精度DEM的過程,并對其特色的三維可視化編輯方法進行了重點闡述。試驗結果表明,LidarStation的三維可視化編輯對DEM生產取得了比較好的效果,對行業的點云數據分類和DEM生產具有比較好的借鑒意義。
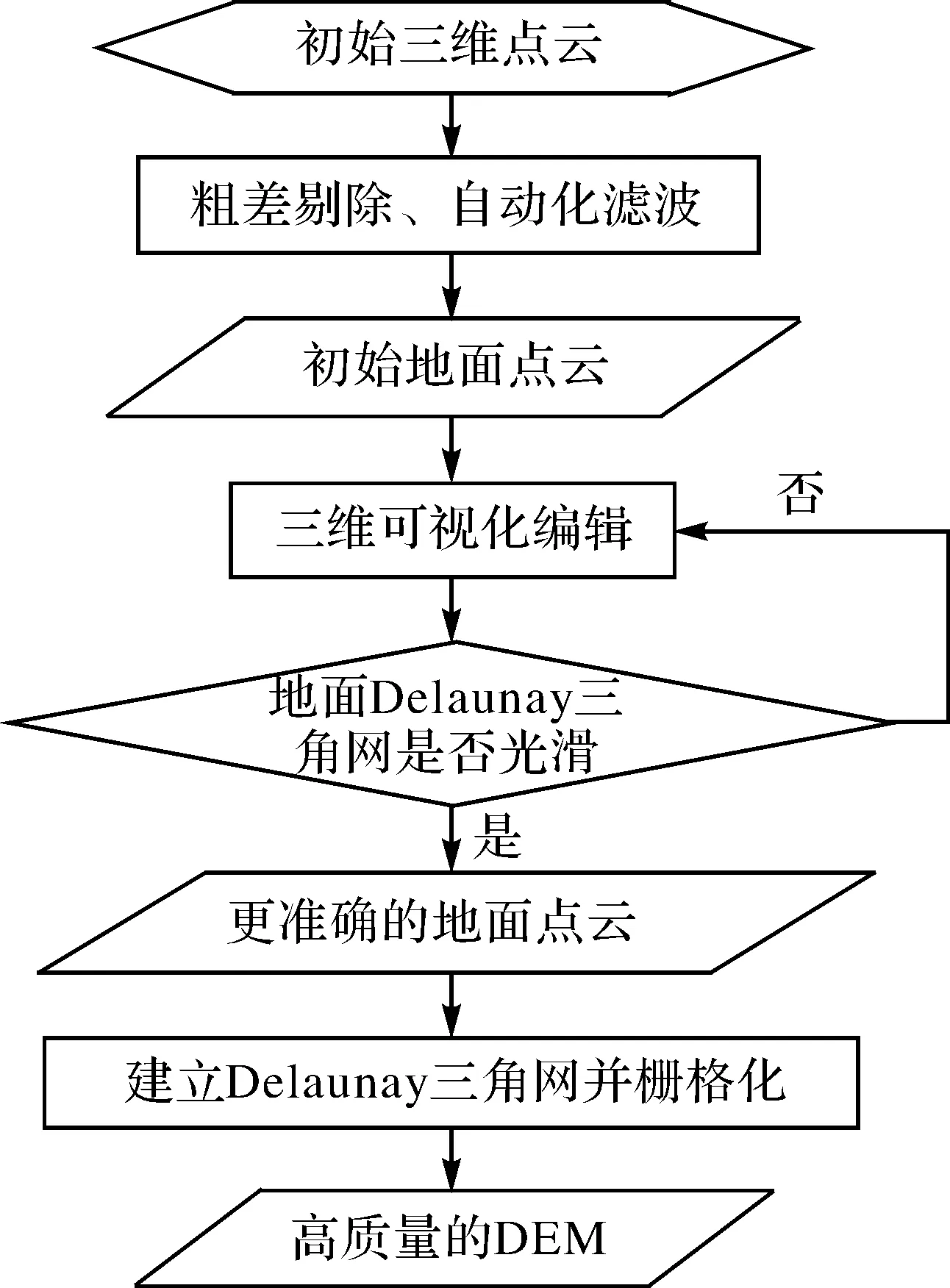
圖3 DEM生產流程圖
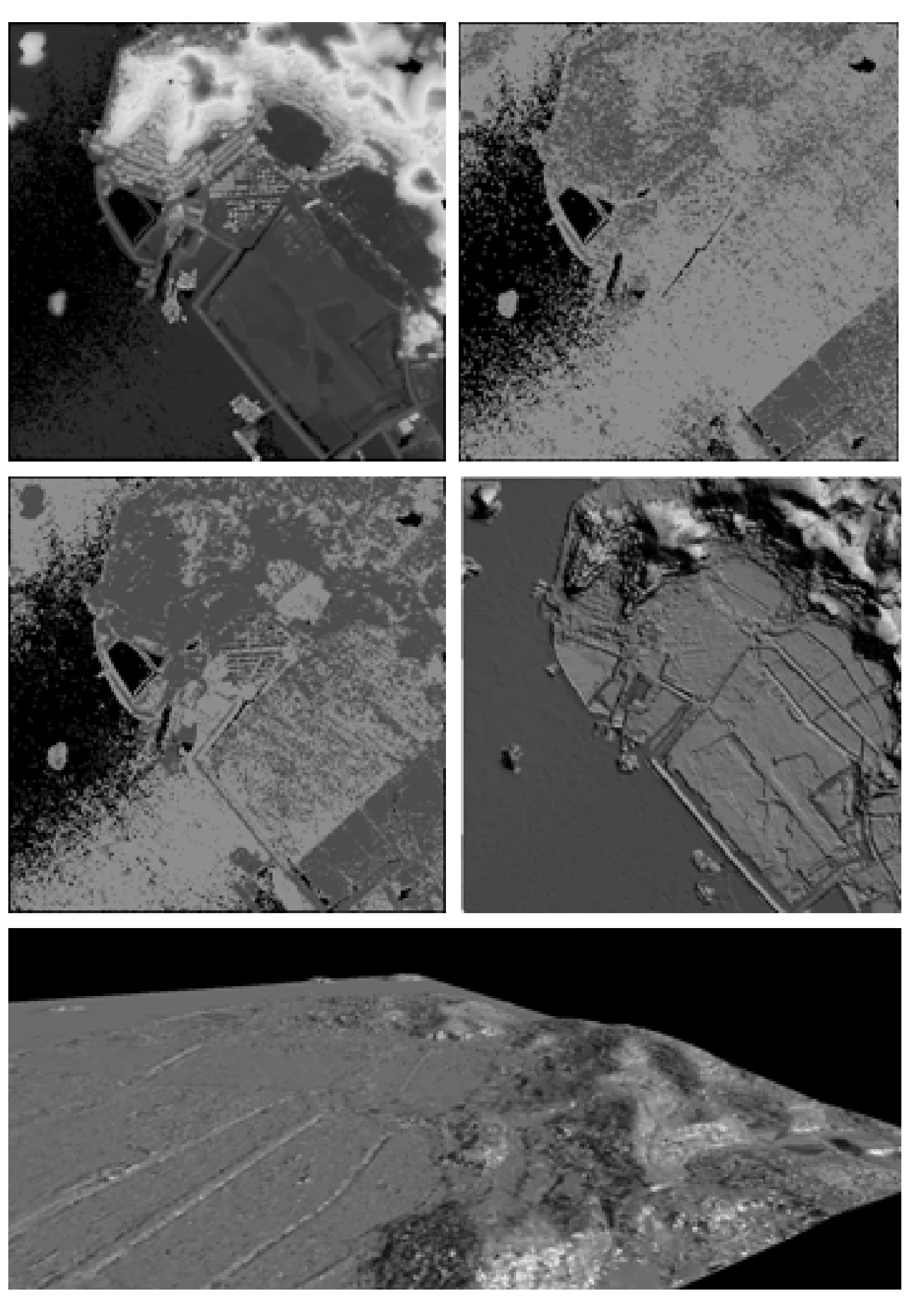
圖4 測區各階段數據成果即局部地面Delaunay三角網可視化效果
猜你喜歡
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
中老年保健(2021年12期)2021-11-30 02:58:01
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
中國化肥信息(2020年7期)2020-03-19 01:54:02
傳媒評論(2019年4期)2019-07-13 05:49:14
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
中國軍轉民(2017年6期)2018-01-31 02:22:28