基于實體化的地面點云建模技術(shù)
2014-08-25 01:19:10江恒彪
測繪工程 2014年7期
江恒彪
(1.茂名市特聘人才管理中心,廣東 茂名 525000; 2.茂名市國土資源勘探測繪院,廣東 茂名 525000)
基于實體化的地面點云建模技術(shù)
江恒彪1,2
(1.茂名市特聘人才管理中心,廣東 茂名 525000; 2.茂名市國土資源勘探測繪院,廣東 茂名 525000)
地面三維激光掃描點云密集,實體信息隱含,特征提取困難。根據(jù)原始點云數(shù)據(jù)的特點,提出對點云進(jìn)行實體化處理,種子點生成技術(shù)可用于實體提取。完成點云實體化后,通過隨機采樣一致算法結(jié)合穩(wěn)健估計方法,可更好地進(jìn)行地物特征提取。由于現(xiàn)實客觀世界的復(fù)雜性,采用一些先驗性知識,可以減少人工處理過程,加快點云分類和實體建模速度。
點云;實體化;模型擬合;RANSAC;特征提取
LiDAR技術(shù)采集的原始數(shù)據(jù)以密集離散點云的方式存在,大量冗余的坐標(biāo)點影響人們從中提取有用的信息,例如確定一個平面數(shù)學(xué)上只需要3個點或幾個點就可以,但點云數(shù)據(jù)每隔2~5 cm就會產(chǎn)生一個數(shù)據(jù)點,遠(yuǎn)比用戶需要的多,如何對數(shù)據(jù)點進(jìn)行簡化處理及建模成為數(shù)據(jù)后處理的重點任務(wù)。對于地理信息系統(tǒng)而言,所有的要素集都是基于矢量的或有明確意義的,一個點要素可能會代表一個學(xué)校、商店或其它,一條線要素可能表示道路、河流、管線等[1]。原始的點云數(shù)據(jù)實體與實體相連,表達(dá)自然地理空間布局,因此,有必要對點云數(shù)據(jù)進(jìn)行分割,對點云進(jìn)行建模,理解各部分點云所代表地面或其它地物(樹或路燈等),提高其對地理狀況的表達(dá)程度。
1 點云實體化
目前的研究還不能用全自動的方法將點云數(shù)據(jù)地理實體一一識別提取出來,采用軟件人工交互刪除無用數(shù)據(jù)等預(yù)處理步驟仍然很有必要。本文的實體化是指把無序復(fù)雜的離散點云重新排序、分類,每一類再分割成具有實體意義的子點云塊,每個實體塊都具有唯一的ID號,例如可以把每棵有意義的樹、路燈等點云塊作為一個實體。
1.1 實體化的重要性
實體化的主要作用是對點云進(jìn)行分類,便于在后期數(shù)據(jù)處理中逐個實體一一識別,使復(fù)雜的點云數(shù)據(jù)處理簡單明了。點云實體化對于地物的建模與可視化具有非常重要的意義:分類后的點云由無序復(fù)雜變成有序化、編址(有ID號)化,甚至結(jié)構(gòu)化,便于實行分層管理(選層)、檢索、渲染等;不同類別的點云可根據(jù)模型特點采用不同的矢量化方法;可以采用分類分層分色顯示技術(shù),隱藏層數(shù)據(jù)僅顯示所需要的數(shù)據(jù),方便軟件處理(見圖1)。

圖1 點云實體化(每棵樹作為一個實體,分類分層分色渲染)
1.2 點云實體化策略
分類是點云數(shù)據(jù)處理的一個技術(shù)難點和關(guān)鍵點。試驗中主要采用種子點生長技術(shù)來進(jìn)行分類[2-3],種子點基本上都選在實體與地面的交界處,根據(jù)實體類型確定種子點擴散方向,如樹、路燈等地物種子點向上生長,首先要設(shè)置好距離閾值,只有小于這個距離的點才會被考慮歸為同一類,也可以考慮將顏色相同或相近的點歸為一類,或考慮將反射強度相近的歸為一類[4];同時利用先驗性知識,如樹的高度在10 m以內(nèi)、電桿的高度在15 m內(nèi)等加以限制,提高點云檢索分類的速度。圖2展示了通過基于種子點生長技術(shù)實體化后,樹、路燈等實體點云被分離出來,并用不同的顏色渲染。
根據(jù)三維空間實體的分類和可視化方法,實體化后點云可分成點、線、面、體4大類,另外,無用數(shù)據(jù)也作為一大類編碼。點云大類編碼如下:
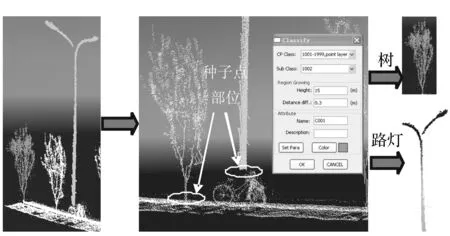
圖2 種子點生長技術(shù)提取實體樹、路燈
a)零層碼:0001——0999;
b)點層碼:1001——1999;
c)線層碼:2001——2999;
d)面層碼:3001——3999;
e)體層碼:4001——4999。
具體的地物分類編碼及策略見表1。

表1點云實體分類策略簡表
2 點云模型擬合與特征提取
點云實體化分類后的主要目標(biāo)是對地物進(jìn)行矢量化、建模、特征提取。
2.1 點云實體形狀特征
點云實體建模是把離散點云數(shù)據(jù)集轉(zhuǎn)換成一個分段連續(xù)、光滑的模型。對人類視覺而言,很容易識別模型對象是否是平面,或是可用函數(shù)表達(dá)的曲面;對計算機分析而言,獲取關(guān)于模型對象盡可能多的先驗性知識對目前的技術(shù)非常重要,這將決定要構(gòu)造的最終模型(平面、圓柱面等)并影響計算效率。假設(shè)已經(jīng)知道表面的類型(平面、圓柱面等),以及一些參數(shù)估計,則可以利用最小二乘法擬合出模型表面,同時剔除不屬于該表面的點云。對于大多數(shù)實體而言,都可以通過擬合平面而達(dá)到實體重建的目的,如盒子型的房屋,先擬合四周的垂直面,與頂面和地面相交確定房屋輪廓線。通過平面相交的方法可以提取到窗戶、陽臺、道路等各種地物的邊緣線[3]。
2.2 點云粗差剔除技術(shù)
點云實體化后的點集仍然有可能存在不屬于模型的點(噪聲點數(shù)據(jù)),模型擬合必須把一些粗差點或噪聲點剔除出來,否則對擬合的模型有嚴(yán)重影響。點云數(shù)據(jù)含有3種誤差:隨機誤差、系統(tǒng)誤差和粗差(噪聲點)。在生產(chǎn)實踐和實驗所采集的數(shù)據(jù)中,粗差出現(xiàn)的概率為1%~10%[5]。通常有兩種方法解決粗差,即數(shù)據(jù)探測法和穩(wěn)健參數(shù)估計,第一種方法使用最小二乘然后統(tǒng)計結(jié)果誤差,排除最大誤差的數(shù)據(jù),處理過程不斷循環(huán)直到殘差滿足正態(tài)分布,該方法的缺點是一次只能找出一個粗差;第二種方法是在計算殘差最小化的過程中,能一次性地排除所有粗差(兩個以上)。
2.3 穩(wěn)健的模型擬合方法
模型擬合是一個最優(yōu)化問題,需要尋找指定模型的最合適參數(shù)使得點云數(shù)據(jù)與最終模型相匹配[6-8]。匹配的準(zhǔn)則可以用點到表面模型的距離來衡量,對于點云集合而言,就是計算所有點到模型的距離之和。距離和越小表明模型擬合得越好。模型擬合可以用數(shù)字公式定義為

(1)
式中:給定n個點云數(shù)據(jù)p1,p2, …,pn;Γ(γ1,γ2,…,γm)是擬合模型的方程,模型含有m個未知參數(shù)γ1,γ2,…,γm。Ψ是一個距離函數(shù)(代數(shù),正交的或其它距離測度),F(xiàn)是關(guān)于這個距離Ψ的函數(shù)(最小二乘估計采用(.)2)。
對于平面擬合來說,Ψ在這里采用歐氏距離函數(shù)。F將采用距離的平方,因此擬合方程變?yōu)?/p>
(2)
2.4 基于RANSAC的點云平面模型擬合與特征提取
根據(jù)隨機采樣一致算法(random sample consensus,RANSAC)[9-10]:產(chǎn)生正確模型的辦法是選擇數(shù)據(jù)點集中模型上的點,排除不屬于模型的點,這通過迭代過程比較容易做到,首先,選擇一個只有幾個點的數(shù)據(jù)點子集,然后進(jìn)行模型擬合,查看
其他點是否大部分可以匹配到擬合的模型上。不斷隨機選點迭代擬合,當(dāng)大部分點都可匹配時即可求得模型參數(shù)。
假設(shè)抽取n個數(shù)據(jù)點,p是RANSAC迭代算法中抽取k次得到好點的概率,w是這些點中好點的比例(只要合理估計這個數(shù)),因為抽取是獨立的,n個點都是好點的概率是wn,那么至少有一個點是壞點的概率就是1-wn,含有壞點將不能擬合出正確的模型。那么算法迭代k次都沒有取到好點集的概率為1-p,即
1-p=(1-wn)k,
(3)
兩邊取對數(shù),得
k=log(1-p)/log(1-wn).
(4)
假設(shè)本次選點99%的可能是好點,則對一個包含10%粗差點的數(shù)據(jù)集擬合平面,由式(4)計算得k=15。如果這3個點恰好是平面上的點,那么其余點都會非常靠近由這3點構(gòu)造的平面。用RANSAC算法擬合平面的過程如下:
1)在分類好的點云實體中隨機選擇3個點,直接計算其對應(yīng)的平面方程ax+by+z=d,然后計算點云至該平面的距離di=|axi+byi+zi-d|;
2)選取閾值t,若di 3)k次重復(fù)以上步驟,比較選取好點最多平面; 4)根據(jù)最小二乘算法以最多的好點重新進(jìn)行平面擬合,得到最終擬合的平面方程。 對于某個隨機采樣擬合平面,檢驗?zāi)P褪欠裾_,可以計算有多少點在平面外的某個距離內(nèi)。RANSAC的優(yōu)點是能夠剔除大部分的壞點,計算模型的參數(shù),最小二乘估計能產(chǎn)生更好的結(jié)果。因此,應(yīng)將RANSAC與最小二乘估計結(jié)合起來計算模型參數(shù)。圖3顯示使用兩種算法擬合提取的路面和墻面。 LiDAR技術(shù)在三維數(shù)據(jù)采集方面表現(xiàn)出巨大優(yōu)勢,測繪技術(shù)人員從海量數(shù)據(jù)提取有用信息成為研究熱點。本文提出采用實體化的辦法預(yù)先對點云數(shù)據(jù)進(jìn)行分類分層,后期數(shù)據(jù)處理就可以對各個點云實體逐一擊破,分實體建模。如果已經(jīng)知道表面的類型(如平面),以及它的一些參數(shù)估計,可以使用最小二乘法擬合出表面,從而實現(xiàn)實體建模及特征提取。 圖3 路面、墻面擬合與特征提取 [1]鄔倫,張晶,劉瑜.地理信息系統(tǒng)原理、方法和應(yīng)用[M].北京:科學(xué)出版社,2001:63-67. [2]G SOHN, I DOWMAN. Terrain surface reconstruction by the use of tetrahedron model with the MDL criterion [C]. Austria, Graz: IAPRS XXXIV 3A, 2002:336-344. [3]S PU, G VOSSELMAN. Extracting windows from terrestrial laser scanning, International Archives of Photogrammetry [J]. Remote Sensing and Spatial Information Sciences, 2007, 36 (Part 3/W52):320-325. [4]龔亮,李正國,包全福.融合航空影像的LiDAR地物點云分類[J].測繪工程,2012,21(1):34-38. [5]邱衛(wèi)寧. 測量數(shù)據(jù)處理理論與方法[M]. 武漢:武漢大學(xué)出版社,2008:111-120. [6]P J HUBER. Robust statistics [M]. Chichester, NY: John Wiley & Sons, 1981:10-20. [7]T KRARUP, J JUHL, K KUBIK. G?tterd?mmerung over least squares adjustment [J]. International Archives for Photogrammetry and Remote Sensing, 1980, 23(B3):369-377. [8]P C J?RGENSEN. Frederiksen. Robust Estimation[J]. International Archives for Photogrammetry and Remote Sensing, 1984, 25(A3a):269-277. [9]Martin A. Fischler and Robert C. Bolles. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography [J]. New York: Communications of the ACM, 1981, 24:381-395. [10]周春霖,朱合華,李曉軍.隨機抽樣一致性平面擬合及其應(yīng)用研究[J].計算機工程與應(yīng)用,2011(7):177-179. [責(zé)任編輯:張德福] A modeling technique of point cloud based on entity-classification JIANG Heng-biao1,2 (1.Maoming City Distinguished Talent Management Center,Maoming 525000, China; 2.Maoming Mapping Institute of Land and Resources, Maoming 525000, China) It’s difficult to extract the feature from 3D terrestrial laser scanning point cloud because the data is mass and geographic entity information is implied. Based on the characteristics classifying the point cloud into entity is proposed with seed-grown method first. After classification and layering, RANSAC algorithm and robust modeling method can be used to extract the object feature. As for the complexity of the objective world, the use of some prior knowledge can reduce the manual processing time when classification and modeling are done. point cloud; entity-classified; modeling; RANSAC;feature extraction 2013-11-07 江恒彪(1977-),男,工程師,博士. P208 :A :1006-7949(2014)07-0030-043 結(jié)束語

猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
電子制作(2019年15期)2019-08-27 01:12:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
中國生物醫(yī)學(xué)工程學(xué)報(2017年6期)2017-02-10 05:11:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
