斗輪式取料機瞬時取料量自動控制技術的研究及其節能應用
2014-08-25 02:18:08李齊權劉立坤
河北工業科技 2014年4期
郝 珅,李齊權,劉立坤
(河北港口集團秦皇島港股份有限公司第六港務分公司,河北秦皇島 066000)
斗輪式取料機瞬時取料量自動控制技術的研究及其節能應用
郝 珅,李齊權,劉立坤
(河北港口集團秦皇島港股份有限公司第六港務分公司,河北秦皇島 066000)
秦皇島港是目前全球最大的煤炭輸出港,它以“懸臂式斗輪取料機-皮帶機輸送機-裝船機”為主要轉運設備進行煤炭裝船作業。本文旨在探索高效的取料機作業方式來實現裝船作業效率的最大化,降低作業能耗。分析了斗輪取料機的特點及其取料操作方式,并在此基礎上引入了閉環自動控制方法,構建了以恒定瞬時取料量為控制目標的閉環控制系統。該系統以PLC為控制核心,基于變頻驅動的回轉系統作為執行部分控制斗輪取料機的懸臂回轉速度進行取料作業,同時通過皮帶秤實時檢測輸送帶瞬時取料量并結合即時的斗輪驅動電機電流數據作為作業實時數據反饋,由此構建了一種基于Profibus-DP現場總線的斗輪取料機自動作業控制系統。該系統試運行于河北港口集團秦皇島港股份有限公司第六港務分公司,提高了取料作業效率,減少了人為因素造成的超載作業,節能效果顯著。
斗輪取料機;瞬時取料量;智能控制;提高效率;節能;曲線擬合;最小二乘法
秦皇島港是世界第一大能源輸出港,是中國“北煤南運”大通道的主樞紐港。其主要能源消耗是煤炭通過取料機、皮帶機、裝船機等港口設備轉運過程中消耗的電能,而斗輪取料機作為煤炭運輸的源頭設備,合理的控制瞬時取料量是港口日常生產中關鍵的環節。評估和研究控制瞬時取料量,對于港口提高作業效率和系統安全,降低能耗,具有十分重要的現實意義。合理均勻控制瞬時取料量,優化作業環境,使取料機在最優狀態下工作,不僅能達到節能目的,而且也可降低設備故障率,延長設備使用壽命,節省維護費用,降低非生產性設備停機時間。
1 懸臂式斗輪取料機作業模型
秦皇島港股份有限公司第六港務分公司取裝線現有取料機6臺,為軌道移動懸臂式斗輪取料機,具有走行、懸臂俯仰、懸臂回轉、斗輪回轉等功能,可以實現連續取料作業。斗輪取料機作業范圍大,可以從軌道兩側堆場取料經皮帶線運送至裝船機裝船,其設計通過能力為6 000 t/h。
取料機司機可通過司機室操作臺上的各種主令開關完成各種動作控制,并借助司機室內的光字牌和觸摸屏即時掌握取料機當前運行狀態及數據信息。如遇特殊情況還可選擇本地及退避操作。原設計正常取料作業均采用司機手動操作形式,主要包括3種基本動作,即取料機走行、懸臂回轉、懸臂俯仰,通過這3種動作的協調配合完成取料作業。如圖1所示。

圖1 斗輪取料機作業現場情況Fig.1 Operation of the bucket wheel reclaimer
取料作業時,懸臂向行走軌道側回轉,當斗輪隨懸臂回轉至料堆邊緣時,取料機向料堆中步進前進大約1 m,然后反向回轉,即懸臂背離軌道旋向料堆外側限制點之后,再步進前進→回轉→步進前進→回轉,從而實現連續作業。作業時分4層取料,第1層厚度不得超過4.5 m,第2層至第4層每層取料厚度不得超過4 m;每層取凈后,將取料機高速行走退至料堆的起始點,調整懸臂俯仰角度后繼續取下一層。懸臂回轉速度要按取料工藝要求進行控制,從而保持取料機的料流恒定,最大取料量不得超過6 300 t/h。
由于料堆形狀的不規則,以及懸臂式斗輪取料機的固有設計形式(如圖2所示),取料機作業過程中,每次能取到的料量是2個圓弧所包含的部分。在固定回轉速度的情況下,大角度時上料流量小,而小角度時上料流量大,導致取料量不均勻[1-3]。
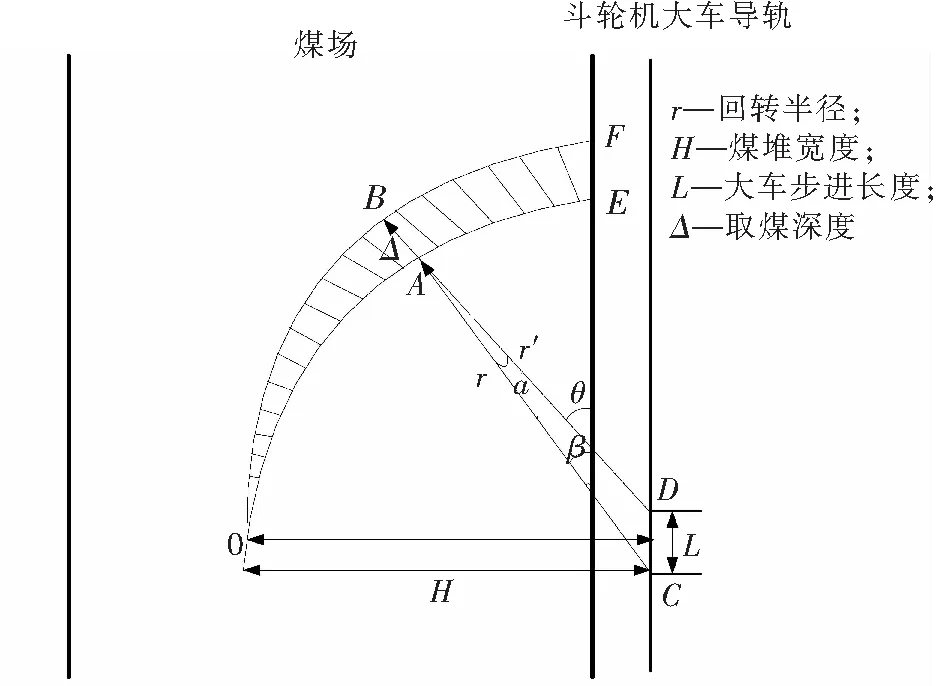
圖2 懸臂式斗輪取料機取料量模型示意圖Fig.2 Model of bucket wheel reclaiming
在這一過程中,懸臂帶動斗輪機構在料堆某一層取料時形成的2個環形曲線為平移關系,回轉角越大,取料深度越小。由此可設取料流量即單位時間內的上料重量為M,物料密度為ρ,取料深度即斗輪挖取的物料沿斗輪運動軌跡的法線方向上的深度為Δ,物料層高即分層取料時每層高度為h,回轉速度即懸臂末端的線速度為v,則有:
M=ρ×Δ×h×v。
(1)
取料流量不僅與取料層高、懸臂的回轉速度有關,還與取料深度有關,而取料深度Δ又與每次取料機步進長度L及回轉角θ有關, 對于某一煤層取料作業來說, 物料密度ρ、取料層高h、取料機步進長度L以及回轉速度v均固定, 取料流量就為回轉角θ的函數。
通過以上分析可以看出,要保證取料流量恒定, 只要根據當前時刻懸臂所處的回轉角度, 就可改變回轉變頻器輸出頻率以調節懸臂回轉速度,但斗輪取料機分層取料工藝和現場實際情況千變萬化, 如取料層高不同、料堆不規則或作業中出現物料局部塌方等情況, 將造成瞬時取料流量的波動和起伏。
如上所述,采用開環控制方式的系統無法獲知實時取料流量的大小, 不能根據現場的作業情況實時改變懸臂回轉速度來改變取料量, 進而無法實現平穩均勻取料,因此在現場實際中更多的是由取料司機手動控制懸臂回轉速度來進行取料操作。
2 懸臂式斗輪取料機瞬時取料量自動控制技術
依上述懸臂式斗輪取料機作業模型而言,目前采用單純的手動操作控制方式,還存在以下幾個問題。
1)通過司機手動操作,司機無法準確判斷瞬時取料量。一般通過安裝在懸臂皮帶前部的皮帶秤查看流量大小,當發現超載或流量偏小時,此時已延時數秒鐘的時間,司機就無法實時通過控制懸臂的回轉速度來有效控制瞬時取料量。
2)手動操作方式人為因素很大,對取料司機的個人操作技能和經驗有很高要求。因此不能準確地根據裝船工藝實際需要來提供取料量,自動化程度低,很難適應當前社會生產高度自動化發展的要求。
3)手動操作易造成長時間欠載或超載,容易造成取料效率不穩定,能源單耗也較高,同時對設備的使用壽命和安全生產影響較大。
本研究旨在探索高效的取料模式來實現取料作業效率的最大化。為了實現取料作業的半自動化,初步在懸臂式斗輪取料機作業控制中引入了閉環控制理論。
閉環控制系統又稱反饋控制系統,它是基于反饋原理建立的自動控制系統。所謂反饋原理,就是根據系統輸出變化的信息來進行控制,即通過比較系統行為(輸出)與期望行為之間的偏差,并消除偏差以獲得預期的系統性能。在反饋控制系統中,既存在由輸入到輸出的信號前向通路,也包含從輸出端到輸入端的信號反饋通路,兩者組成一個閉合的回路。
圖3所示為閉環控制系統的簡圖,從圖3可以看出系統設定值與反饋值的差值,經由控制器運算,輸出控制信號給執行機構,執行機構作用于被控對象,得到系統輸出;同時,系統輸出經信號采集裝置的檢測得到反饋值用于比較控制。
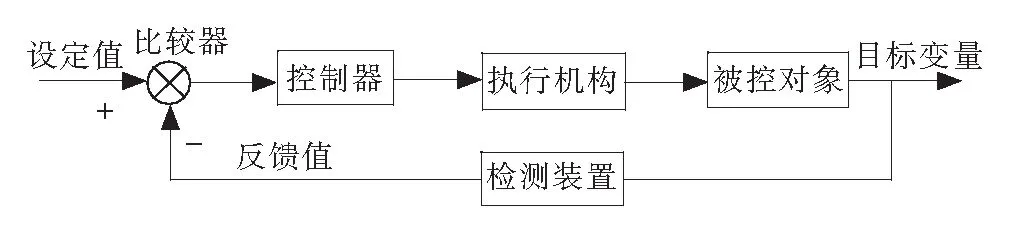
圖3 瞬時料量閉環控制簡圖Fig.3 Instant closed-loop input control
以閉環控制為基本控制原理,建立以瞬時取料量為被控量的閉環控制系統,理論上完全可以實現瞬時取料量對系統設定值的跟隨。
3 基于閉環控制方式的取料自動控制系統控制模型
通過以上分析,研究人員建立以恒定取料量為控制目標的取料機回轉自動控制系統,它的基本控制模型如下:閉環系統的輸入為瞬時料量期望值,輸出為取料機實際的瞬時取料量。在單機控制程序中,PLC通過檢測期望值與實際值的偏差,來進行懸臂回轉速度的調節以實現瞬時取料量對設定值的跟隨。
取料機回轉閉環控制系統的實現,關鍵環節在于對實時取料量的檢測。系統反饋信號的實時性、準確性直接決定著閉環系統的控制效果。
懸臂式斗輪取料機作業時,斗輪驅動電機電流是反映斗輪所承受的負載,即斗輪所取料量的最實時的信號。而取料量可由取料流量體現,即單位時間內的取料量。本系統中取料量可由安裝于取料機懸臂前部的電子皮帶秤檢測得到。但皮帶秤檢測到的瞬時料量與斗輪瞬時取料流量存在數秒的延時,因此需要建立瞬時取料量與實時斗輪驅動電機電流的數學模型,從而由實時的斗輪驅動電機電流計算得到近似的實時取料量,作為控制系統反饋信號。系統控制模型如圖4所示。
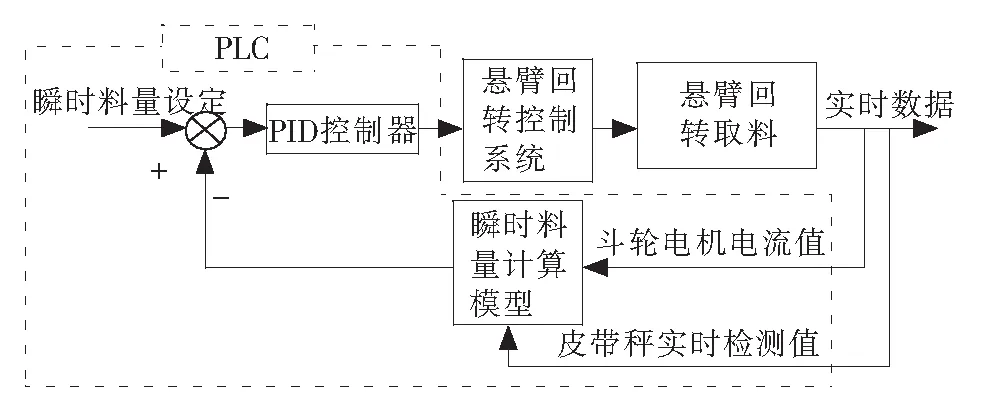
圖4 系統控制模型Fig.4 System control model
在本系統中PLC為控制核心,由PLC進行數據的采集、瞬時料量反饋值的計算以及回轉輸出頻率計算;懸臂回轉控制系統為本系統的執行部分,PLC通過對懸臂回轉速度的控制來實現單位時間取料量的調節;回饋部分由采集得到的斗輪驅動電機電流值,經數學運算得到瞬時取料量,最后由皮帶秤實時檢測值進行數據校正[4-5]。
4 取料作業自動控制系統的硬件構成
取料作業自動控制系統,由西門子S7-400系列PLC可編程控制器、6SE70系列回轉變頻器、拉姆齊14系列皮帶秤、電流采集器、6SE743模擬量采集模塊及PLC控制軟件組成。
斗輪驅動電機電流檢測:由電流互感器采集斗輪驅動電機的實時電流,并轉換成4~20 mA的電流信號。此信號進入取料機PLC,由6SE743模擬量板將電流信號轉換為數字量信號,再經過一系列的數字運算得到實時的斗輪驅動電機電流值。
1)取料量檢測 取料量檢測由拉姆齊14系列皮帶秤進行,由于皮帶秤安裝于取料機懸臂中部,因此皮帶秤的實時檢測值滯后于實時的斗輪受料量,存在十余秒的延時。
2)執行機構 PLC通過Profibus-DP總線與6SE70變頻器通訊,通過改變變頻器的輸出頻率來進行取料機懸臂回轉速度的調節,以實現料流流量的調節。
本系統的硬件結構如圖5所示。

圖5 硬件系統結構圖Fig.5 Hardware system structure diagram
5 取料作業自動控制系統的軟件實現
5.1斗輪驅動電機電流與取料流量數學關系的建立
斗輪驅動電機電流與取料流量之間存在一定的關系,理論上取料流量越大,斗輪驅動電機電流越大,反之越小。但由于物料品種、密度以及黏度的不同,斗輪驅動電機電流也不盡相同,會略有差異。因此,斗輪驅動電機電流與瞬時取料量之間的關系是非線性的,簡單地用斗輪驅動電機電流來推算斗輪瞬時取料量是不可行的。因此,需要建立兩者之間的數學關系。
曲線擬合,俗稱拉曲線,是一種把現有數據通過數學方法來表達的方式。科學和工程問題可以通過諸如采樣、實驗等方法獲得若干離散的數據,根據這些數據,研究人員往往希望得到一個連續的函數(也就是曲線)或者更加密集的離散方程與已知數據相吻合,這個過程就叫作擬合。本設計正是采用動態曲線擬合的方法來建立斗輪驅動電機電流與瞬時取料量之間的關系[6-8]。
通過對取料機在各種條件下的作業情況進行觀測,采集并整理了一組斗輪驅動電機電流和皮帶秤檢測值的數據,再選用最小二乘法對二者進行動態曲線擬合。
最小二乘法是一種數學優化技術,它通過最小化誤差的平方和尋找數據的最佳函數匹配。利用最小二乘法可以簡便地求得未知的數據,并使得這些求得的數據與實際數據之間誤差的平方和為最小。最小二乘法多項式擬合的基本原理從幾何意義上講,就是尋求與給定點(Xi,Yi) (i=0,1, … ,m)的距離平方和最小的曲線y=P(x)。函數P(x)稱為擬合函數或最小二乘解。
試用最小二乘法求斗輪驅動電機電流和瞬時料流流量的二次擬合多項式P(x)=a0+a1x+a2x2,將采集的數據組代入方程組,求得擬合多項式為P=-35+8.6x+0.16x2(其中x為斗輪驅動電機電流值,P為瞬時取料量),由此得到的PLC運算程序如圖6所示。
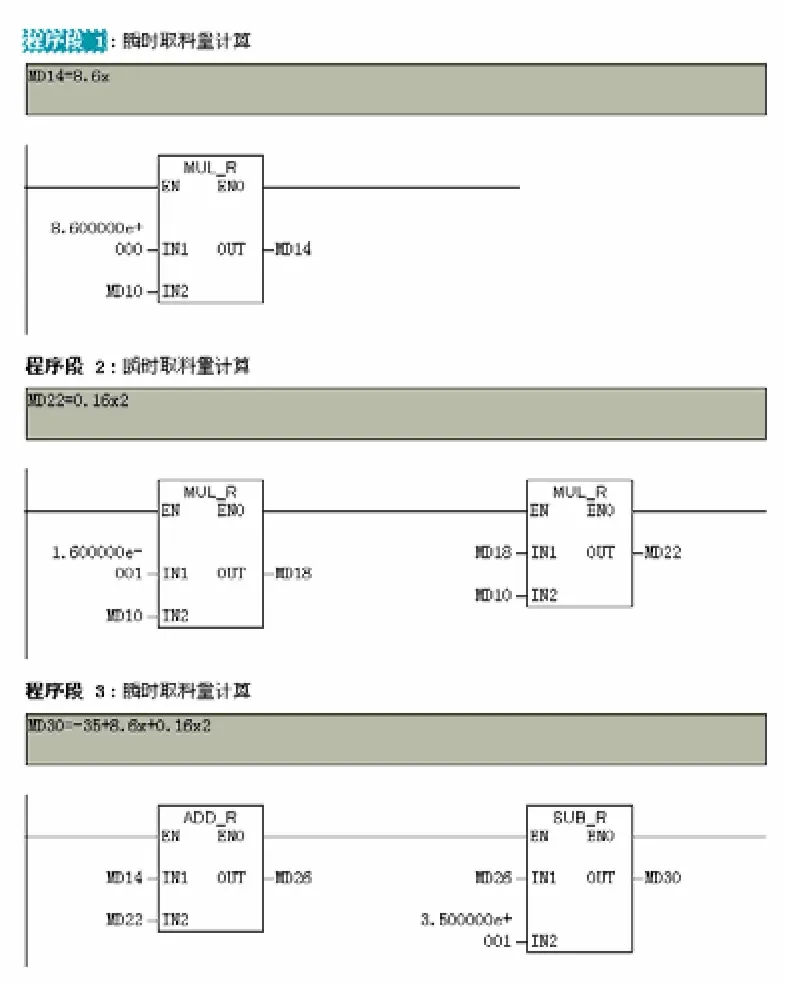
圖6 瞬時取料量計算程序Fig.6 Instantaneous instant reclaimer calculation program
5.2基于Profibus-DP的回轉變頻控制
利用Profibus-DP總線進行PLC與變頻器的雙向通訊,進行回轉變頻器的實時控制和狀態反饋。這樣,復雜的控制系統只需要通過編程來實現,簡單、易行[9]。
系統通過西門子6SE70系列變頻器自帶的CBP通訊板實現S7-400與變頻器的Profibus-DP通訊,通訊方式選擇PPO4。
經過變頻器相關參數的設置及PLC硬件組態后,編制相應的PLC讀寫程序即可完成與變頻器的雙向通訊,通訊主程序如下。
建立DB50,調用SFC14,SFC15,組態后6SE70的地址為576,即W#16#240
1)讀出數據
CALL "DPRD_DAT" SFC14 ——讀取DP從站的數據
LADDR :=W#16#240 //硬件組態的起始地址,即I Addess中的576
RECORD :=P#DB50.DBX 0.0 BYTE 12 //傳送起始地址及長度
RET_VAL:=DB50.DBW24 //錯誤代碼:查幫助可得具體含義
2)發送數據
CALL "DPWR_DAT" SFC15 ——發送給DP從站數據
LADDR :=W#16#240 //硬件組態的起始地址,即Q Addess中的576
RECORD :=P#DB50.DBX 12.0 BYTE 12 //傳送起始地址及長度
RET_VAL:=DB50.DBW26 //錯誤代碼:查幫助可得具體含義
經過以上的設置,變頻器相關控制參數定義如表1所示。

表1 變頻器控制參數定義
通過以上分析,可以得出變頻器的PLC控制程序如圖7、圖8所示。
變頻器的頻率控制數據由MW93得到,而該數據在不同情況下可由2種途徑獲得。
1)取料機回轉在手動控制方式時,該數據來自于PLC對回轉控制操作手柄模擬量信號的采集與變換。回轉控制操作手柄的模擬量信號送入PLC的模擬量板,進行模數轉換,得到代表回轉頻率給定值的數字量信號,再經過數據變換得到與變頻器頻率設定信號相對應的數據格式。
2)取料機回轉在閉環自動控制方式時,回轉控制操作手柄只控制回轉方向,回轉變頻器的頻率設定來源于PID控制器的輸出,它由瞬時取料量偏差經PID控制器運算得到。
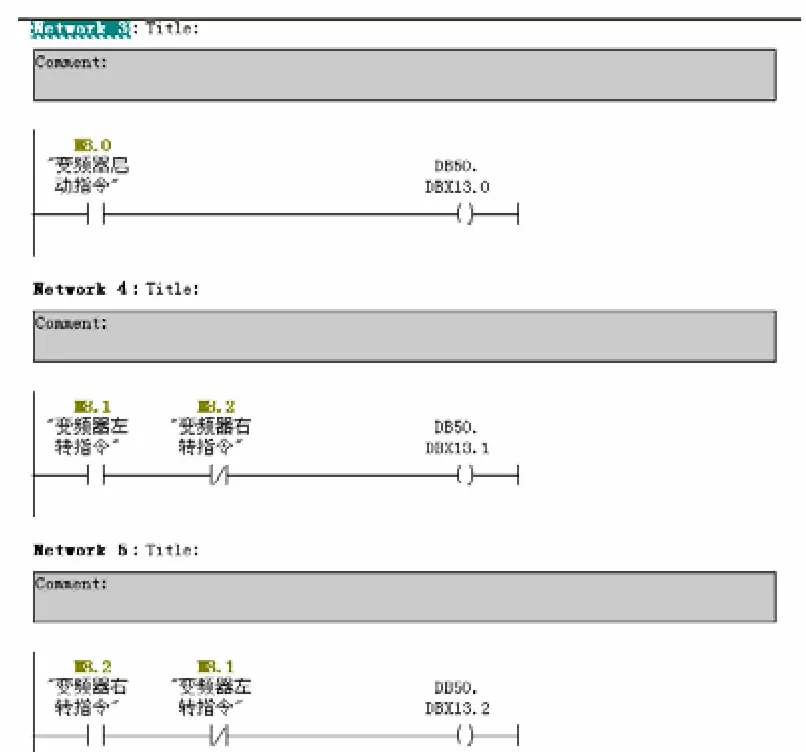
圖7 變頻器啟停和正反轉控制Fig.7 Frequency shifter start/stop and forward/backward control
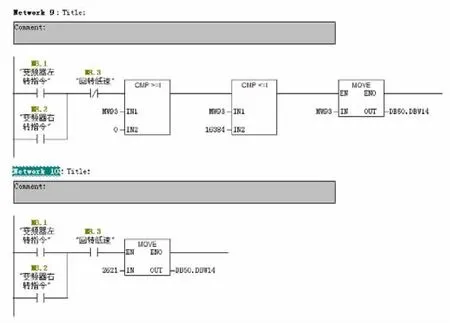
圖8 變頻器頻率給定Fig.8 Frequency setup of frequency shifter
6 效果評價
本研究所述系統通過曲線擬合法建立了斗輪驅動電機的工作電流與實時取料量的數學關系,這為閉環控制系統提供了有效的數據保障,也是系統的關鍵所在。通過檢測和采集方法來取代人的視覺和思維,自動測算瞬時料流流量,并實時對懸臂的回轉速度進行調節從而使取料量保持在額定流量。這對于提高港口取料裝船效率,杜絕人為超載,優化能源消耗,保障港口設備的安全穩定高效運行具有十分重要的現實意義。通過將閉環自動控制理論引入取料機作業控制系統,可以有效地控制取料機的瞬時取料量,避免因取料量過大導致的超載壓停生產流程的情況,從而提高了設備的使用壽命,減少了設備的非生產性故障停機時間。同時,系統能夠有效提高電能的使用效率,既提高了公司經濟效益,又符合國家節能減排的總體要求。取料司機的勞動強度可大大降低,既符合系統設計的人性化要求又體現了企業的人文關懷。
/
[1] 何恩江.懸臂式斗輪堆取料機臂架回轉機構1/cosφ調速控制系統[J].變頻器世界,2006(5):106-107. HE Enjiang.Cantilever wheel arm gyral machine for heaping and taking the material 1/cosφspeed control system[J]. The
World of Inverters, 2006(5):106-107.
[2] 李永偉,朱婧菲,劉占陽,等.連續輸送物料計量稱重系統的設計[J].河北科技大學學報,2013,34(3):213-217. LI Yongwei,ZHU Jingfei,LIU Zhanyang,et al.Design of measuring and weighing system of continuously conveyed materials[J].Journal of Hebei University of Science and Technology,2013,34(3):213-217.
[3] 王 杰,楊傳舉,李建沛.變角度電子秤在單斗輪取料機上的應用[J].燒結球團,2006,31(5):43-46. WANG Jie,YANG Chuanju,LI Jianpei.The application of angle-changeable electronic scale on single bucket-wheel reclaimer[J].Sintering and Pelletizing, 2006,31(5):43-46.
[4] 何 東,高幼年, 沈文忠.電廠斗輪機取料流量與斗輪驅動電機電流的曲線擬合[J].數據采集與處理,2008,23(增):236-240. HE Dong,GAO Younian,SHEN Wenzhong. Curve fitting method for relationship between eal-time coal flows on covering felt and scoop wheel current[J].Journal of Data Acquisition & Processing, 2008,23(sup):236-240.
[5] 牟京東,黃 欣.變頻技術在堆取料機行走驅動中的應用研究[J]. 港口裝卸. 2005(4):26-27. MOU Jingdong,HUANG Xin. Application of frequency conversion technology in research of driving the walking stacker reclaimer[J]. Port Operation, 2005(4):26-27.
[6] 劉偉鋒.斗輪堆取料機取料能力的提升改造[J].礦業工程研究,2012,27(3):77-80. LIU Weifeng.Improvement of reclaiming capacity of bucket wheel reclaimer[J].Mineral Engineering Research, 2012,27(3):77-80.
[7] 陳 曉.現場總線在港口斗輪堆取料機中的應用[J].科技創新與應用, 2012(29):108. CHEN Xiao. Application of fieldbus in port bucket wheel stacker reclaimer[J]. Technology Innovation and Application, 2012(29):108.
[8] 孫鶴旭,梁 濤,云利軍.Profibus現場總線控制系統的設計與開發[M].北京:國防工業出版社,2007. SUN Hexu,LIANG Tao,YUN Lijun. Design and Development of the Field Bus Control System Profibus[M].Beijng: National Defence Industry Press,2007.
[9] 沈文忠,高幼年,陳 剛.電廠燃料傳輸流量檢測裝置的研究[J].影像技術,2006(5):15-18. SHEN Wenzhong,GAO Younian,CHEN Gang.Research of transmission flow measure device for power plant fuel[J].Image Technology, 2006(5):15-18.
Research of automatic control technology for instantaneous reclaiming rate of a bucket-wheel reclaimer and its energy-saving application
HAO Shen, LI Qiquan, LIU Likun
(The No.6 Branch Company, Qinhuangdao Port Company Limited, Hebei Port Group, Qinhuangdao Hebei 066000, China)
As the largest coal mine exporting port, Qinhuangdao Port employs "Crane type bucket wheel reclaimer-belt conveyor-shipment loader" infrastructure to fulfill the shipment. This paper is to explore a high efficiency operation mode of the reclaimer to maximize the loading productivity, while to reduce the power consumption. The features and reclaiming operation method of a bucket-wheel reclaimer are analyzed. Based on the analysis, a closed loop method is introduced. A closed loop control system is constructed for measuring instantaneous reclaiming rate by using a belt weigher in real time. Combining with the collected current signal from the bucket wheel, the field bus is used as the detecting device. By using PLC as control centre in the system, the reclaiming procedure is done by a closed loop intelligent control over the bucket wheel boom rotating velocity combined with real-time motor current data of bucket wheel drive which is used as operating data feedback. A novel automatic controlling system for bucket wheel reclaimer is proposed which is based on profibus-DP fieldbus. This system is now under pilot run at the Number 6 Branch Company of the Qinhuangdao Port Company Limited, with reclaiming rate increased, overloading operation minimized and significant electric energy saving effect achieved.
bucket-wheel reclaimer; instantaneous reclaiming rate; automatic control; efficiency enhancement; energy efficient; curve-fitting; least square method
1008-1534(2014)04-0326-06
2013-11-11;
2014-01-12;責任編輯:張 軍
郝 珅(1983-),男,河北秦皇島人,工程師,碩士研究生,主要從事港口物流運輸及港口機械設備方面的研究。
E-mail:neohao@126.com
TP336
A
10.7535/hbgykj.2014yx04012
郝 珅,李齊權,劉立坤.斗輪式取料機瞬時取料量自動控制技術的研究及其節能應用[J].河北工業科技,2014,31(4):326-331.
HAO Shen, LI Qiquan, LIU Likun.Research of automatic control technology for instantaneous reclaiming rate of a bucket-wheel reclaimer and its energy-saving application[J].Hebei Journal of Industrial Science and Technology, 2014,31(4):326-331.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
故事大王(2016年7期)2016-09-22 17:30:08
自動化博覽(2014年12期)2014-02-28 22:34:39
