
一種現場總線型風力發(fā)電機組主控系統設計
2014-08-27 08:12:50滕云
時代農機 2014年2期
關鍵詞:系統
滕 云
(湖南機電職業(yè)技術學院 電氣工程學院,湖南 長沙 410151)
在當前并網風力發(fā)電技術方面,風力機組單機容量的擴大化和系統的直驅化是風力發(fā)電系統發(fā)展的兩大趨勢,而采用變槳距控制方式的變速恒頻(VSCF)風力發(fā)電技術得到廣泛應用。機組主控制系統是整個風力發(fā)電機組控制的核心,是機組安全可靠運行以及實現最佳運行的保證。當前兆瓦級風電機組控制系統為基于數字信號處理器DSP或可編程控制器PLC的微機控制,機組運行的可靠性及自動化程度越來越高。這樣一來,整個風機控制系統的體積就越來越小,控制性能越來越完善,智能化程度越來越高,運行更加可靠,維修和操作則更簡便易行,從而真正有效地實現了風電場的無人監(jiān)控及無人值守運行。而隨著風電機組的容量擴大,控制策略的改進,控制系統的復雜性的增加,傳統的中央式控制體系正面臨挑戰(zhàn),在工業(yè)控制系統中廣泛應用的以太網控制技術也逐漸在風力發(fā)電機組控制系統中得到應用,如基于PAC(Programmable Automation Controller) 的 網 絡 控 制 ,PROFIBUS-DP現場總線控制系統等,利用工業(yè)現場網絡的分布式控制技術來完成,可以通過網絡把控制器和分散的驅動裝置連接起來。這樣做可以極大地簡化控制設備,減少系統控制的復雜性,降低成本,并且提高了系統的安全性。
EtherCAT(Ethernet for Control Automation Technology)是由德國倍福BECKHOFF自動控制公司開發(fā)的一種實時工業(yè)以太網技術,它基于標準的以太網技術,具備靈活的網絡拓撲結構。系統具有配置簡單,有效數據率高,全雙工,易于實現等特性獲得越來越多的產品研發(fā)人員的關注。文章介紹了EtherCAT技術的原理和系統結構,并將其應用于變速恒頻風力發(fā)電機組主控制系統中,給出了主從站設計方案和基于ET1100的從站控制器與DSP控制器的接口設計。
1 基于EtherCAT技術的風電機組主控系統
(1)系統概述。風力發(fā)電機組主控系統要實時采集當前的機組參數,根據最佳風能捕獲算法,適時的對各控制單元給出合理的操作指令。同時,控制系統要建立良好的人機交互界面,能在控制面板上顯示和查詢風力發(fā)電機組的運行狀態(tài)和參數、顯示故障狀態(tài)、查詢故障地點、設置運行參數等。除此之外,風力發(fā)電機組控制系統需具有與中央控制室上位計算機的遠程通訊功能,以便中央控制室適時監(jiān)測風力發(fā)電機組的運行狀態(tài)、運行數據和故障情況等,其主要功能如圖1所示。
由下圖1可以看出,變速恒頻風力發(fā)電機組控制系統主要是由變流器控制單元、變槳距機構、偏航機構、機組主控制器等構成的集散控制系統變流器控制單元用來對整流器和逆變器進行控制,在機組啟動時實現軟并網,在正常工作過程中接受主控制器的命令實現輸出功率的控制,從而使機組工作在最佳風能捕獲狀態(tài)下;當風速過高,超過系統的額定功率時,變槳距系統調節(jié)槳葉節(jié)距角,使風力機的轉速下降,將功率控制在額定功率以下;當風向變化時,偏航系統可以跟蹤風向,使機組始終迎風工作,并且當系統因為多次對風而導致電纜纏繞時進行解繞操作;而機組主控制器用于協調這些部件的工作,同時采集當前的外部參數(風速、轉速、電網電壓等),根據最佳風能捕獲算法,適時的對各控制單元給出合理的操作指令。

圖1 變速恒頻風力發(fā)電機組主控系統
(2)基于EtherCAT技術的風電機組主控系統。由前面的分析可以知道,基于EtherCAT的變速恒頻風力發(fā)電機組控制系統包括變流器控制單元、變槳距控制系統、偏航控制系統,監(jiān)測系統等子控制系統,這些子系統是風力機組控制系統的基本構成單元,它們是整個機組網絡控制系統中的從站控制設備,而帶有MAC的PC機作為機組主控制器對整個系統進行監(jiān)控,為主站設備,管理整個機組控制系統,并將現場采集的參數傳送給整個風電場的監(jiān)控室,進行統一管理,如圖2所示,為基于EtherCAT技術的風力發(fā)電機組系統的結構圖。
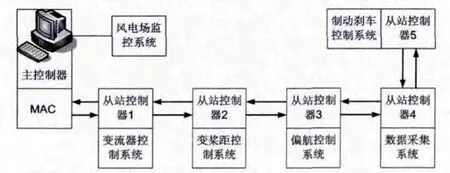
圖2 基于EtherCAT的風電機組主控系統
帶有MAC接口的PC機作為機組主控制系統的主站,通過編程對從站及其運行方式進行配置,運行風電機組監(jiān)控軟件,并周期性地通過以太網絡發(fā)送帶有從站控制器命令的數據幀,實現對變流器、槳距和偏航等系統的控制,從而實現風電機組的啟停、變流、并網、數據采集和變槳距等控制要求,同時各從站控制器在控制周期能通過插入相應報文反饋到主站的PC機。由于EtherCAT技術良好的網絡性能和數據傳輸能力,使得系統能夠有效地對機組狀況進行實時監(jiān)控,并能對風力突變情況下的機組槳距,變流裝置及時進行控制,跟蹤最大風能,提高系統的效率。
2 基于EtherCAT的系統實現
2.1 硬件設計
(1)主站設計。EtherCAT技術的實現包括主站實現和從站實現。EtherCAT主站不需要專用的通訊處理器,只需使用無源的NIC卡或主板集成的以太網MAC設備即可,完全采用軟件方式在主機中實現協議的識別和封裝。本文采用帶有以太網接口的普通工控PC機即可。PC機除了帶有與EtherCAT從站進行主從控制的以太網卡外,還應當具有與風力發(fā)電場中央監(jiān)控系統通信的接口。
(2)基于ET1100的從站控制器設計。在文章的風力發(fā)電機組控制系統中,從站的設計包括變流器系統、變槳距系統、偏航系統的控制器及與這些控制設備進行以太網連接的EtherCAT從站協議控制器的設計,用來實現主站和從站之間的通訊及控制功能。下面以變流系統控制器TMS320F2812與從站控制器1的接口實現為例,說明EtherCAT從站控制器的設計。
EtherCAT從站控制器ESC(EtherCAT Slave Controller)是通過專用硬件實現的,它實現EtherCAT的物理層與數據鏈路層的協議。現在市場上有多種EtherCAT協議控制器可供使用,如ASIC芯片,也可以一次性購買獲取授權的二進制代碼,通過價格低廉的FPGA實現從站控制器的功能。從站控制器ESC與從站主機設備之間的接口方式根據過程數據接口PDI(Process Data Interface)的形式來確定。
在本系統中,從站控制器ESC采用倍福BECKHOFF公司的ET1100,由于變流器控制系統采用TI公司的TMS320F2812控制,其接口規(guī)范可以選擇為微處理器方式,通過對ET1100自帶的EEPROM進行編程后選擇配置。TMS320F2812與ET1100的接口硬件實現如圖3所示。
其中變流系統控制器F2812實現EtherCAT對變流器的具體控制和數據反饋,通過PDI接口與ET1100連接,讀取和寫入ET1100緩沖區(qū)的數據;ET1100帶有兩個MII接口,它們在硬件上實現了EtherCAT協議的數據鏈路層,外擴的兩個物理層芯片實現了工業(yè)以太網的的物理層。網絡接口由PHY和網絡變壓器組成,其中網絡變壓器的作用是實現隔離和阻抗匹配。EEPROM通過I2C接口編程,用于保存從站配置數據和從站描述數據。
2.2 軟件設計
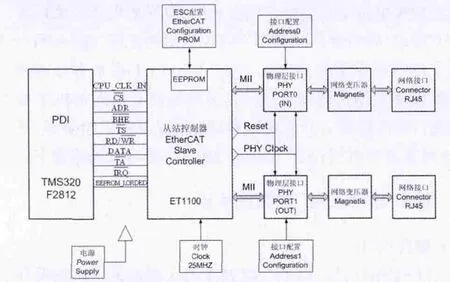
圖3 基于ET1100的EtherCAT從站結構圖
(1)主站軟件設計。EtherCAT主站軟件用以實現機組主控制系統應用程序,主站和從站配置和對各從站的控制。為了方便主站軟件的開發(fā),EtherCAT技術組織現在提供主站樣本代碼,可以方便的把該代碼嵌入到主站的工控PC機操作系統中,加快項目開發(fā)進程。同時,倍福等公司通過提供EtherCAT組態(tài)軟件來實現主站控制程序的編寫,TwinCAT System Manager即為倍福公司TwinCAT系統的配置工具,可以實現解析XML配置文件,通過在線編程對ET1100的EEPROM進行編程設置,管理從站狀態(tài)發(fā)送非周期和周期性數據幀,實現主從站之間數據的傳輸。同時可以編寫應用程序實現應用層各個程序的輸入輸出數據和網絡輸入輸出數據的連接。
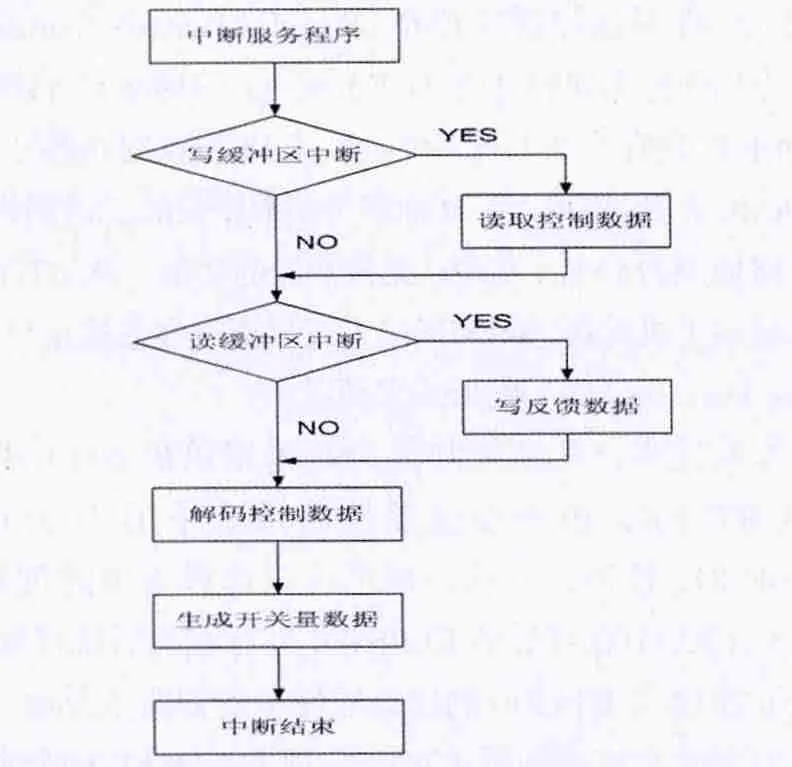
圖4 程序中斷流程圖
(2)從站控制軟件設計。在從站,主要對DSP進行從站應用層程序的設計,主要分為EtherCAT網絡接口程序和變流器控制程序,變流器控制程序主要是周期性的數據反饋和非周期性的變流器中電力電子器件開關量控制數據,本例中可以采用中斷方式進行,程序流程如圖4所示,當F2812控制器完成初始化之后,系統進入周期性運行狀態(tài),等待EtherCAT幀的到來。當數據幀到達ETl100從站控制器之后,向F2812發(fā)出中斷,DSP響應中斷讀取從站控制器中的指令數據,并且把反饋狀態(tài)數據寫入到從站控制器中,完成一次數據的交互。DSP得到來自ET1100的指令數據之后,進行解碼,并把解碼得到控制數據送到變流器的控制程序中去,變流器控制程序根據控制要求完成控制策略,并輸出電力電子器件開關的驅動信號,完成變流過程。
3 結語
機組主控制系統在并網變速恒頻風力發(fā)電系統中發(fā)揮重要作用,它具有協調機組變流,槳距偏航系統,制動系統等各部分之間的通訊和對機組狀態(tài)的監(jiān)控功能,基于工業(yè)以太網的風電機組主控系統以高度的實時性和良好的數據處理能力得到越來越多的應用,文章引入EtherCAT以太網控制技術,設計了基于EtherCAT技術的風電機組主控系統,并以主控制器和變流器控制為例,EtherCAT系統進行了硬件和軟件的設計,為EtherCAT技術在風力發(fā)電系統中的應用提供參考。
[1]葉杭冶.風力發(fā)電機組的控制技術[M].北京:機械工業(yè)出版社,2002.
[2]王小川.PAC一一先進的可編程自動化控制器[J].PLC&FA,200l,(4):41-44.
[3]宋文娟.基于PAC的風力發(fā)電機組控制系統的研究與開發(fā)[D].長沙:湖南大學,2008.
[4]謝香林.Ether CAT網絡及其伺服運動控制系統研究[D].大連:大連理工大學,2008.
[5]單春榮,劉艷強,郇極.工業(yè)以太網現場總線Ether CAT及驅動程序設計[J].制造業(yè)自動化,2007,(11):79-82.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
