5 t/30 t雙鉤橋式起重機的結構設計與多功能驅動控制實現
2014-09-04 09:26:00修學強
中國鑄造裝備與技術 2014年2期
修學強
(陜西國防工業職業技術學院,陜西西安 710300)
1 總體結構設計
起重機械主要用于裝卸和搬運物料,是現代化生產的重要設備。它不僅廣泛應用于工廠、礦山、港口、車站、建筑工地、電站等生產領域,而且也應用到人們的生活領域。使用起重運輸機械,能減輕工人勞動強度,降低裝卸費用,減少貨物的破損,提高勞動生產率,是實現生產過程機械化和自動化不可缺少的機械設備。
本文結合生產實際要求設計了一種5 t/30 t的橋式起重機,該起重機機由工作機構、工程材料和動力系統三部分組成的,設計結構如圖1、2所示。
(1)工作機構
該起重機的工作機構由起升、運行和變幅機構組成。起升機構是升降重物的機構,它是起重機械最主要的機構,該起重機械有兩套起升機構,分別為升降重物能力最大的主鉤(承載質量30 t)和承載質量為5 t的副鉤。運行機構是使起重機械或起重小車行走的機構,該起重機在設計時保留了大車(最長行程)和小車(最短行程)兩個行走機構。變幅機構是使起重機械臂架傾角變化,改變幅度的機構。

圖1 5 t/30 t的橋式起重機

圖2 5 t/30 t的橋式起重機行走機構
(2)工程材料
工程材料主要指橋式起重機的主要金屬結構,該結構要保障設備良好的運行穩定性、抗震性和適當的剛度,需要對結構的靜剛度等參數進行分析計算,在這里不加重點敘述。
(3)動力系統
動力裝置是驅動起重機械運動的動力設備。它在很大程度上決定了起重機械的性能和構造特點。起重機械的控制系統包括操縱裝置和安全裝置。各種機構的起動、調速、改向、制動和停止,都是通過操縱控制系統來實現的。
2 電氣控制系統結構
根據設計需要重新設計了一套電控系統,以保證設備的多段速控制、多位置操作和有效的安全保護控制,力求做到操作簡單方便、控制全面有效、超程及時保護、耗損迅速斷電。由于生產現場中橋式起重機大車橋架跨度比較大,在兩側分別裝置兩個規格相同的電動機M3和M4拖動,沿著長程(大車運行)軌道縱向的兩個方向同速運行,小車移動機構由一臺電動機M2拖動,沿著固定在大車橋架上的小車軌道做橫向兩個方向的運動,主鉤升降由電機M5拖動,副鉤升降由電機M1拖動,電氣控制線路如圖3、4所示。
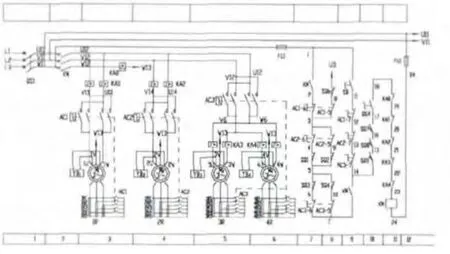
圖3 電氣控制圖1

圖4 電氣控制圖2
各移動部分均采用限位開關做行程限位保護,分別為主鉤上升限位開關SQA,副鉤上升限位開關SQB,小車橫向限位開關SQ1、SQ2,大車縱向限位開關SQ3、SQ4。為保證橋式起重機在運行過程中的安全性,移動部件需在極限位置上安裝擋鐵,在任何一個擋鐵觸碰到行程開關時斷開電路,停止設備運行,在一切檢查就緒后重新通電使起重機正常運行。
起重機上的5臺電機均采用電磁抱閘制動,這種制動方式結構簡單,便于維修,出現問題能夠及時更換處理,比起其它制動方式更加可靠,并能夠減少由于過多的控制線路所造成的維修問題,其中主鉤制動電磁鐵YA5,副鉤制動電磁鐵YA1,小車制動電磁鐵YA2,大車制動電磁鐵YA3與YA4,YA1—YA4為兩相,YA5、YA6為三相,當電動機通電時,電磁鐵放開制動器,當電動機斷電時,電磁鐵制動。
3 電氣多功能控制說明
(1)啟動運行
操作人員按下啟動按鈕SB,主接觸器KM吸合,使兩相電源進入各凸輪控制器,一相電源引入到各電機定子,此時凸輪控制器手柄均在零位,電機不會運轉
(2)凸輪控制器的多功能控制
大車、小車、副鉤的控制分別采用三個凸輪控制器來進行,下面以大車控制過程為例來分析多功能調速控制的實現,小車與副鉤的控制過程與大車相同。
轉動凸輪控制器SA3手柄向后旋轉1個角度后,處于位置1狀態下,主觸頭V2-3M1、4M3、W2-3M3、4M1接通正反轉連鎖出頭SA3-6接通,SA3-5、SA3-7 斷開,電機 M3、M4 接通電源,YA3、YA4 通電,制動器放開,此時轉子串聯了全部電阻,具有較大的啟動轉矩和較小的啟動電流,大車以最低的轉速慢慢向后運行。
再轉動凸輪控制器SA3手柄向后旋轉1個角度后,處于位置2狀態下,轉子電阻控制觸頭3R3、4R5接通,電機M3、M4轉子各切除一段3R、4R中的電阻,電機轉速略有升高。依次往后直到位置5狀態,接觸觸頭依次閉合轉子電阻逐漸切除,電機轉速逐漸升高,當轉子電阻全部切除時,轉速達到最高。
當凸輪控制器向前旋轉時,其過程與上述正好相反,電機反向旋轉,并隨著向前旋轉的檔位逐漸加大,轉子的轉速也逐漸升高,直到獲得最大轉速,當操作手柄扳到零位時,全部斷電,制動器開始制動,這樣大車就可以擁有11段的調速控制。
(3)主令控制器的多功能控制
主鉤電機是整個橋式起重機中最為重要的部分,是工作量最大,承載量最高的電機,所以主鉤電機采用主令控制器來實現多功能調速控制。主鉤運行有升降兩個方向,上升控制與凸輪控制器基本相似,區別是它通過接觸器來實現的。下降的過程則與凸輪控制器有明顯的區別,主鉤下降有6擋位置,“J、1、2”這三個檔位為制動下降位置,防止在吊有重載下降時速度過快,電機處于反接制動狀態,“3、4、5”這三個檔位為強力下降位置,主要用于輕載時快速下降。
4 控制系統的PLC改造
為了更好的控制橋式起重機大、小車運行,主、副鉤提升、下降重物及調速,解決起重機工作在斷續狀態操作頻繁、通斷次數較高、負載沒有規律性、時輕時重、經常承受大的過載和機械沖擊的問題,將PLC應用于起重機控制系統中,為了更好地克服這些缺點,提高運行可靠性,降低維護量,特對該橋式起重機的控制系統進行了基于西門子226的PLC改造,依然可實現上述的多功能調速控制,外部接線與地址分配等內容在此不詳加敘述,具體程序控制過程見圖5。

圖5 PLC程序控制過程
5 結語
本設計可以順利實現5 t/30 t雙鉤橋式起重機的多功能調速控制,在用PLC控制替代傳統繼電器控制系統的基礎上,進一步改進和完善電氣控制系統,安全性能更好,因而可以獲得更好的應用。
[1]左鵬軍.變頻器及PLC在橋式起重機控制系統改造中的應用[J].機床電器,2007(10).
[2]王軍偉.PLC變頻調速在橋式起重機中的應用[J].機械工程與自動化,2011(4).
[3]劉超然等.橋式起重機在線協同設計系統研究[J].機械設計與制造,2013(9).