基于迭代UKF的主動段彈道跟蹤算法研究*
2014-09-05 06:36:02易東云
計算機工程與科學 2014年1期
關鍵詞:測量
孫 雷,李 冬,易東云
(1.國防科學技術大學理學院,湖南 長沙410073;2.南京炮兵學院,江蘇 南京211132)
1 引言
衛星主要采用星載紅外傳感器,通過被動探測,獲得彈道導彈的到達角信息,實現對目標發射的監視、跟蹤、彈道估計等功能[1,2]。彈道導彈的飛行過程分為主動段和被動段,主動段包括垂直上升段、轉彎段、過渡段和穩定段。紅外傳感器只能獲取導彈目標的到達角和輻射強度信息,觀測情形如圖1所示。
衛星在只有角度測量信息下對于彈道導彈主動段的跟蹤屬于無源跟蹤,導彈目標的狀態方程和測量方程都是非線性的,并且衛星與目標距離較遠,可觀測性較弱。這些都對主動段彈道跟蹤問題帶來了較大的困難,因此尋找一種快速收斂且具有較高精度的跟蹤算法十分關鍵。
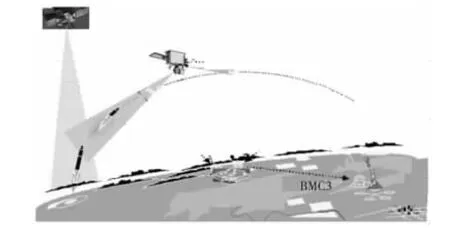
Figure 1 Obervation of the trajectory form the satellite圖1 衛星對導彈主動段的觀測
擴展卡爾曼濾波 EKF(Extended Kalman Fil-ter)是常用的非線性濾波算法,但在實際應用中它存在明顯的缺陷。無跡卡爾曼濾波 UKF(Unscented Kalman Filter)是目前受到廣泛使用的非線性濾波算法,通過選取一些樣點更精確地給出狀態變量經過非線性變化后的均值和方差,減小了線性化帶來的誤差,避免了EKF算法在求解Jacobi矩陣帶來的Fisher矩陣病態問題。但是,標準的UKF算法存在收斂速度慢、精度不高的問題。一種易于實現的提高非線性近似精度的方式是使用迭代測量更新的方式,這在EKF上已經得到了成功的應用[3]。與迭代EKF的思想類似,可以使用狀態的估計值代替預測值來重新進行無跡變換UT(Unscented Transformation),得到新的濾波參數,并再次利用觀測值來改善估計狀態,從而提高狀態估計的精度,已有文獻提出迭代UKF的思想和易于實現的迭代測量更新的UKF算法[4,5]。
本文通過分析彈道導彈在主動段的受力情況,引入一種基于重力轉彎模型的狀態方程。根據基于迭代測量更新的UKF思想,研究其在衛星觀測信息下的迭代更新過程,從而建立基于迭代UKF的主動段跟蹤算法。仿真結果表明,迭代UKF算法與標準UKF算法相比,收斂速度更快、跟蹤精度更好,是一種適應性更強的導彈目標主動段跟蹤算法。
2 主動段彈道估計模型
主動段為彈道導彈飛行的第一個階段,其強機動特性和變質量過程使得主動段彈道動力學特性十分復雜。主動段時間并不長,一般在幾十秒到幾百秒范圍內,但是主動段的跟蹤對于被動段的狀態估計以及導彈的射程和落點卻起著決定性作用。
對主動段彈道準確地建模是實現彈道導彈跟蹤的前提,主動段的跟蹤模型分為導彈的主動段狀態模型和預警衛星觀測模型。
2.1 主動段彈道模型
導彈在主動段的受力情況十分復雜,主要包括推力、重力、氣動阻力等。對用于主動段彈道估計的目標狀態方程已有相關的研究[6,7],其中一種為基于重力轉彎假設的狀態方程。重力轉彎假設是指假設導彈在主動段飛行過程中,攻角很小,幾乎為零,推力與阻力均沿速度方向,重力是使彈道彎曲的唯一因素,因此稱為重力轉彎。本文使用的目標狀態方程就是重力轉彎模型。
設導彈在地心慣性坐標系ECI(Earth Cen-tered Intertial)下的位置速度矢量分別為r和v,則r= [x y z]T,v=˙r= [˙x ˙y ˙z]T。導彈受到的力可以分為沿重力方向的力和沿速度方向的力,在重力轉彎假設條件下,導彈彈道參數的主動段動力學方程可記為:
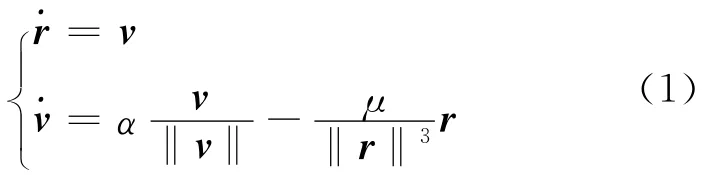
其中,μ為地球引力常數,α為導彈推力加速度大小。考慮實際中大氣透過率的影響,紅外傳感器在導彈飛出稠密大氣層后才能發現目標,因此這里忽略氣動加速度的影響。
下面分析推力加速度大小α隨時間變化的情況。設導彈推力大小為常值T,則推力加速度可以寫成:

其中,m(t)為t時刻導彈的瞬時質量,σ為發動機秒耗量,t0為初始時刻。
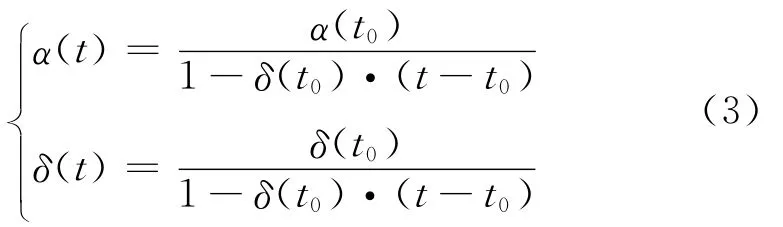
上式對時間求導后可以得到:

結合公式(1)和公式(4),就可以得到基于重力轉彎模型的主動段狀態方程:
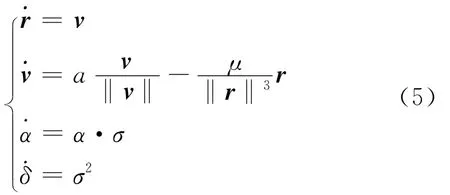
目 標 的 狀 態 記 為:X = [x,y,z,˙x,˙y,˙z,α,∑]T,則主動段動力學模型(5)可以表示為:

其中,X為目標的狀態,w為零均值不相關的狀態噪聲。根據給定的初始條件,采用數值積分的方法對公式(6)求解就可以得到導彈在主動段某一時刻的位置和速度。
2.2 衛星角度觀測方程
在衛星測量坐標系 UEN(Up East North)中,角測量方程定義如下:
其中,ψ和γ分別是目標在UEN坐標系下的方位角和俯仰角,如圖2所示。

Figure 2 Satellite observation model圖2 衛星觀測模型
觀測模型基于目標的角度測量信息,設在Tk時刻目標在ECI坐標系下的狀態變量為Xk,其中位置變量為rk,衛星的位置變量記為sk,根據ECI坐標系與UEN坐標系的關系,Tk時刻衛星的視線測量矢量zk可以表示為:

3 迭代UKF濾波算法
UKF算法是基于UT變換和Kalman濾波技術的一種濾波算法[8,9],其通過特別選取一些樣點,更好地近似隨機變量經過非線性變化后的均值和方差。將系統圍繞狀態估計重新進行UT變換計算濾波參數,然后再一次利用觀測值改善對狀態的估計,這就是迭代 UKF——IUKF(Iterated UKF)的思想。
3.1 UT變換
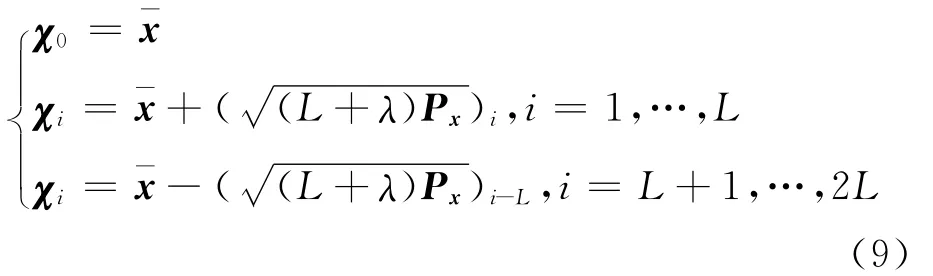
UT變換是一種計算隨機變量在經歷非線性變換后的統計特性的方法。考慮一個隨機變量x(維數為L),通過一個非線性函數y=f(x)得到隨機變量y,假設x具有均值ˉx與協方差Px,為計算y的統計特性,首先根據下式:得到2L+1個Sigma采樣點,其中λ=φ2(L+κ)-L為尺度參數,常數φ決定這些Sigma采樣點在xˉ附近的擴展范圍;κ是另一個尺度因子,通常取為0或3-L;(是矩陣方根的第i列,矩陣方根可以通過Cholesky分解得到。將Sigma采樣點代入非線性函數:

通過下式計算y的均值和協方差矩陣:
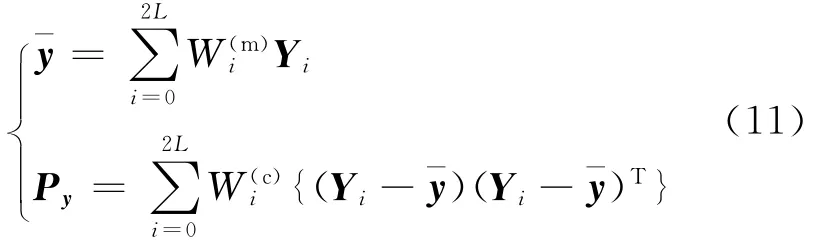
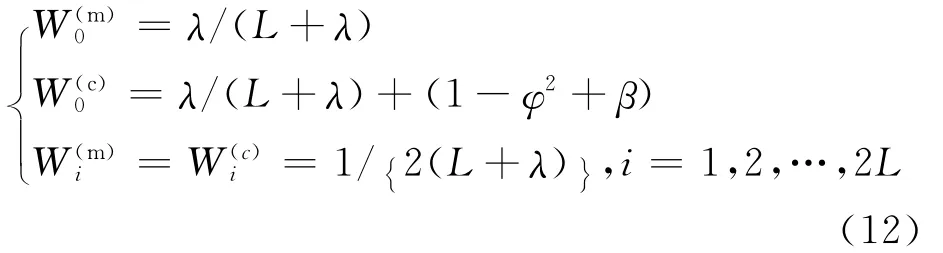
其中,權Wi由下式給出:其中,β為狀態分布參數,對于高斯分布,β=2是最優的。如果狀態變量是單變量,則最佳的選擇是β=0。
3.2 迭代UKF(IUKF)濾波算法
將UT變換應用于Kalman濾波,就可以得到UKF濾波算法。將UKF濾波算法狀態估計結果Xk重新進行UT變換,計算濾波的參數,再次利用觀測值改善對狀態的估計結果,這樣就得到了迭代UKF算法。
對于非線性的狀態方程和測量方程:

對于本文研究的導彈主動段的跟蹤問題,上式中的狀態方程就是2.1節中的方程(6),測量方程就是2.2節中的方程(8)。對于狀態變量Xk的估計,首先由k時刻的UKF算法計算得到狀態估計和協方差分別為^Xk和P-k,由^Xk和Pk生成的新采樣點可重新求得濾波器的增益Kk,再利用觀測值對狀態估計進行改善,具體步驟如下:
(1)初始化。
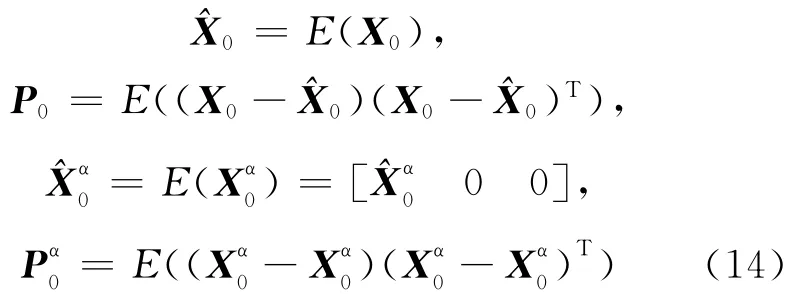
(2)計算采樣點。


(3)時間更新。
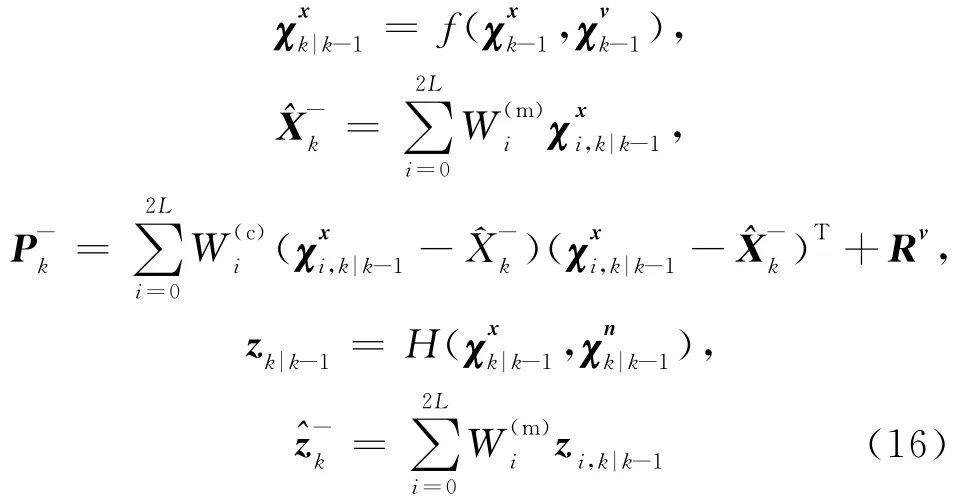
(4)測量更新。
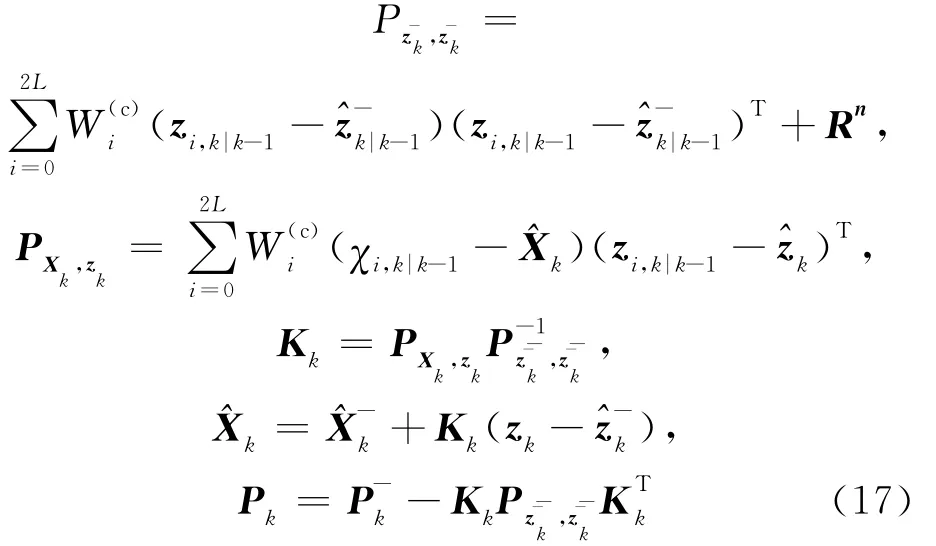
其中,Rv為系統狀態噪聲方差,Rn為系統測量噪聲方差,xα= [xTvTnT]。
(5)重新計算采樣點,更新估計結果。

Step 2 定義:
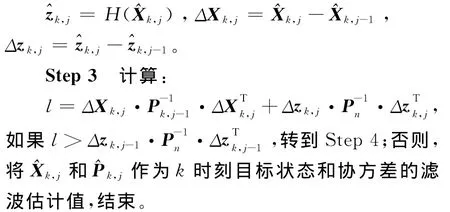
Step 4 j=j+1,g=η·g,重新計算采樣點:

將公式(18)代入公式(16)和公式(17)式重新計算濾波參數,得到新的估計結果:

轉向Step 2。
最后將公式(19)作為k時刻的濾波狀態和協方差估計結果。
在上述IUKF算法流程中,為滿足迭代要求,一般取0<η≤1。
與UKF算法相比,IUKF算法增加了迭代測量更新運算,每次迭代增加的運算量主要是樣點的非線性變換。總體來說,IUKF算法比UKF算法增加了一些計算量,但其計算復雜度仍然為同一量級。由于不同的非線性變換形式帶來的計算量有較大不同,這將影響IUKF算法與UKF算法之間計算量的差別。
4 仿真實驗
在仿真計算機CPU為P4雙核、2.7GHz、內存為1GB的情況下,使用Matlab工具進行仿真計算。仿真實驗中,測量數據間隔Ts取0.5s,視線測量誤差σLOS分別取30μrad和60μrad。目標為某2 000km彈道導彈,主動段飛行時間為100s,首次觀測時間為第20s。選取兩顆地球同步軌道衛星觀測。Monte-Carlo次數為50次。圖3是測量數據間隔為0.5s、σLOS為30μrad情況下UKF算法和IUKF算法對目標速度和位置的跟蹤誤差仿真結果。圖4是測量數據間隔為0.5s、σLOS為60 μrad情況下UKF算法和IUKF算法仿真結果。
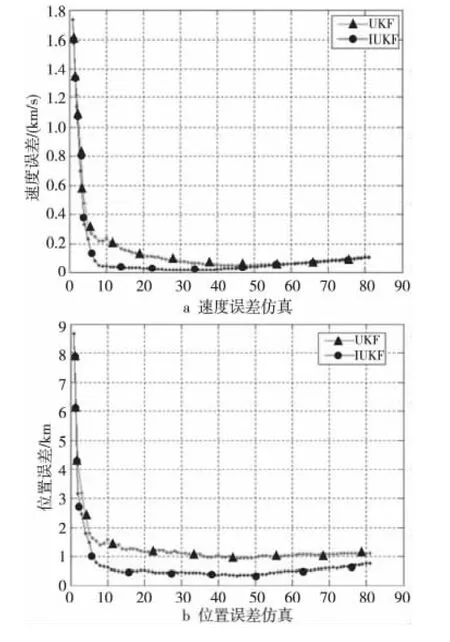
Figure 3 Simulation results of UKF and IUKF whenδLOS =30μrad圖3 σLOS取30μrad時UKF與IUKF仿真結果
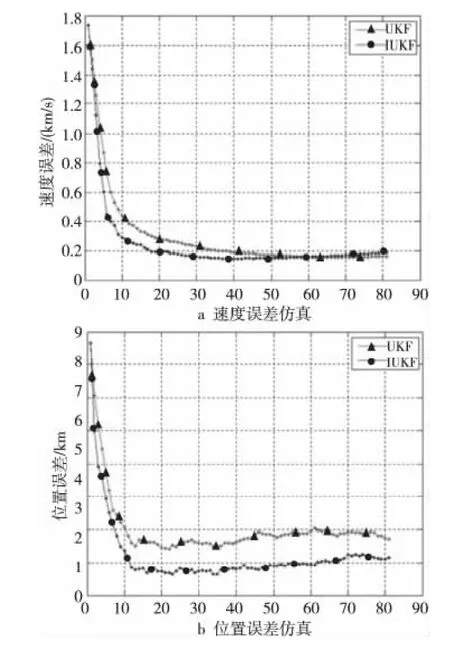
Figure 4 Simulation results of UKF and IUKF whenδLOS =60μrad圖4 σLOS取60μrad時UKF與IUKF仿真結果
從圖3和圖4的仿真結果可以看出,IUKF算法對新的觀測值反應更迅速,在相同的仿真條件下,IUKF算法比UKF算法收斂速度更快、收斂精度更高。
5 結束語
本文圍繞衛星在僅有角度測量信息下彈道導彈的主動段跟蹤問題,對常用的非線性濾波UKF算法進行改進,提出了IUKF算法。采用重力轉彎模型建立主動段狀態方程,結合UKF算法與IUKF算法進行仿真實驗。實驗表明,本文提出的方法收斂速度更快、收斂精度更高,適用于基于衛星角度測量信息下導彈目標主動段跟蹤的應用。
[1] Danis J.Space-based tactical missile launch parameter estimation[J].IEEE Transactions on AES,1993,29(2):412-424.
[2] Li Yi-cong,Kirubarajan T,Bar-Shalom Y,et al.Trajectory and launch point estimation for ballistic missiles from boost phase LOS measurements[C]∥Proc of IEEE Aerospace Conference,1999:425-442.
[3] Bellaire R L,Kamen E W,Zabin S M.New nonlinear iterated filter with applications to target tracking[C]∥Proc of the SPIE’95,1995:240-251.
[4] Van Zandt J R.Boost phase tracking with an unscented filter[C]∥Proc of the SPIE’02,2002:263-274.
[5] Zhan Rong-hui,Wang Ling,Wan Jian-wei.Research on robust algorithm for single observer passive target tracking[J].Signal Processing,2007,23(3):464-468.(in Chinese)
[6] Li X R,Jilkov V P.Survey of maneuvering target tracking part II:Motion models of ballistic and space target[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(1):96-119.
[7] Li Dun.Target location and prediction with space early warning system[D].Changsha:National University of Defense Technology,2001.(in Chinese)
[8] Julier S J,Uhlmann J K,Durrant-Whyte H F.A new method for the nonlinear transformation of means and covariances in filters and estimatimators[J].IEEE Transactions on Automatic Control,2000,45(3):477-482.
[9] Wan E A,Merwe R,Nelson A T.Dual estimation and the unscented transformation[M]∥Advances in Neural Information Processing Systems 12,Cambridge:MIT Press,2000:666-672.
附中文參考文獻:
[5] 占榮輝,王玲,萬建偉.穩健的單站無源目標跟蹤算法研究[J].信號處理,2007,23(3):464-468.
[7] 李盾.空間預警系統對目標的定位與預報[D].長沙:國防科學技術大學,2001.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
