一種改進的室內物品RFID定位技術*
2014-09-06 10:49:59哈卡米徐邦振吳哲夫
單片機與嵌入式系統應用 2014年6期
關鍵詞:區域
哈卡米,徐邦振,吳哲夫
(浙江工業大學 信息工程學院,杭州 310023)
?
一種改進的室內物品RFID定位技術*
哈卡米,徐邦振,吳哲夫
(浙江工業大學 信息工程學院,杭州 310023)
本文介紹了可應用于室內物品定位的改進LANDMARC定位系統。該算法在原始算法基礎上對RFID標簽進行分類,同時引入了參考誤差的概念來提高系統定位精度。改進后的算法結合RF code公司硬件設備組建定位系統。實驗結果表明,改進后的算法減少了定位時間,提高了室內物品的定位精度。
RFID室內定位;LANDMARC定位系統;標簽分類;參考誤差
引 言
目前,用于室內定位的技術主要有紅外線定位技術、WiFi定位技術、ZigBee定位技術、超寬帶定位技術、RFID定位技術等。其中RFID定位技術具有非視距傳播、傳輸范圍大、讀寫速度快、安全性高等優點,相比其他定位技術,更適合用于室內物品的定位、追蹤。
1 RFID技術簡介
RFID是一種利用射頻信號通過空間耦合(電感或電磁耦合)實現無接觸的信息傳輸手段,它通過射頻信號自動識別目標對象并獲取相關數據,可工作于各種惡劣環境,并可同時識別多個標簽,操作快捷方便[1]。
2 LANDMARC系統
為了增加室內系統定位精確性而不增加閱讀器數量,LANDMARC系統[2]引入了位置固定的參考標簽來輔助定位。系統結構如圖1所示,其中包括4個RF閱讀器、49個參考標簽和9個待定位標簽。
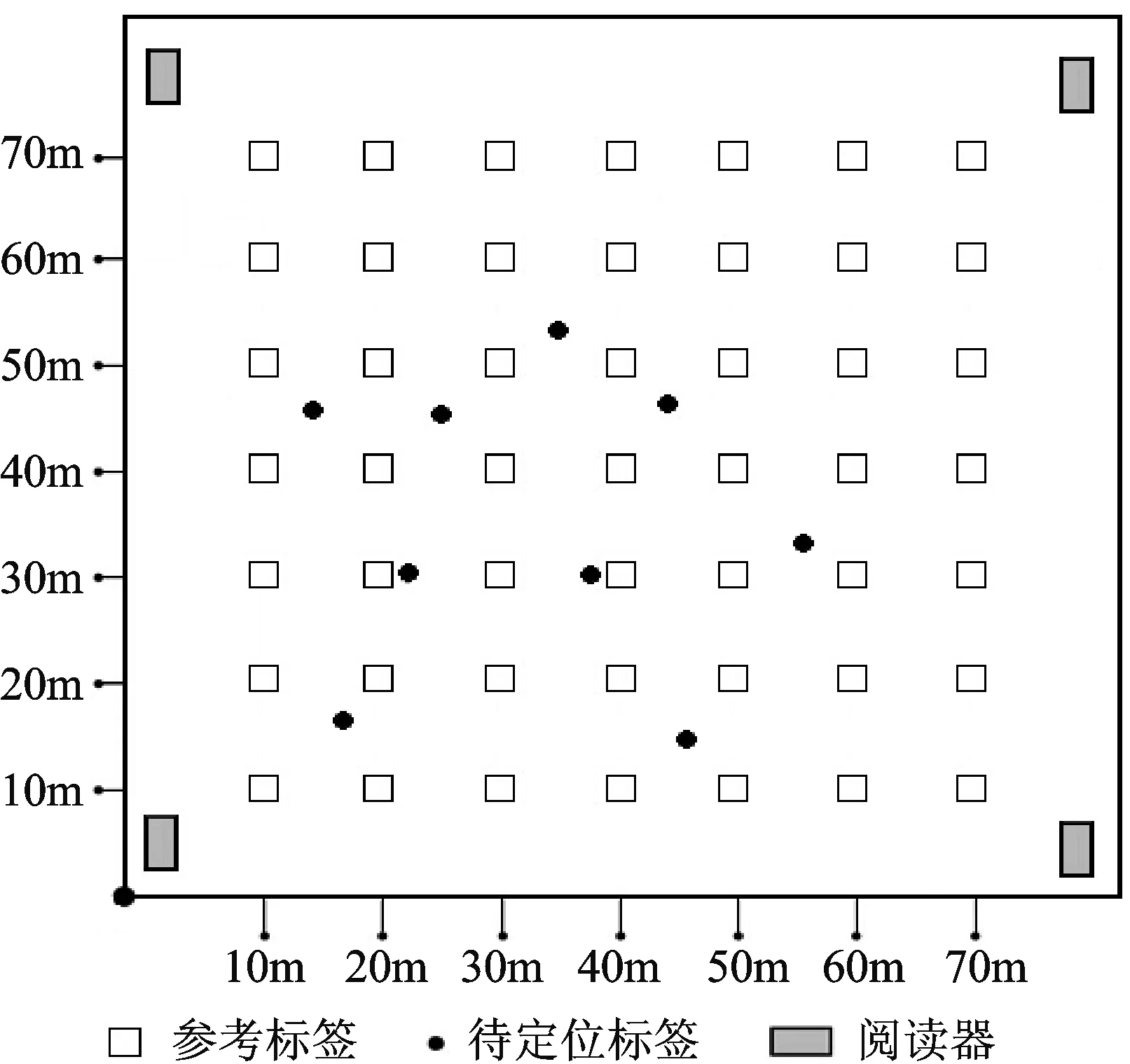
圖1 LANDMARC 定位系統結構圖
LANDMARC定位技術采用了在統計學上稱為“最近鄰居”的思想,選擇了k個信號強度值與待定位標簽相近的參考標簽,利用加權算法,計算待定位標簽的坐標。算法過程如下。
假設有n個RF閱讀器,m個參考標簽,u個待跟蹤標簽。定義跟蹤標簽p的信號強度矢量為:Tp=(T1,T2,…,Ti,…,Tn)T。其中Ti表示閱讀器i感知到的跟蹤標簽的信號強度,i∈(1,n)。定義參考標簽q的信號強度矢量為:Rq=(R1,R2,…,Ri,…,Rn)。其中,Ri表示參考標簽i的信號強度。跟蹤標簽p和參考標簽q的歐幾里得距離(D)[3]為:
(1)
對于m個參考標簽,跟蹤標簽p的歐式距離矢量為:
(2)
通過比較D中各分量的值,找出跟蹤標簽p的k個最近鄰居,稱這種方法為k-最近鄰算法[4]。其他u-1跟蹤標簽用同樣的方法找出k個最近鄰居。跟蹤標簽坐標(x,y)可以按下式計算:
(3)
其中,wi是第i個最近參考標簽的加權系數,由經驗給出其計算公式:
(4)
3 改進的LANDMARC系統
3.1 改進的LANDMARC系統算法
圖2表示算法改進后的標簽布局。改進算法引入標簽分層的概念,將定位區域分為若干個小的定位子區域(SubLocationArea)。每個子區域由1個主參考標簽(PrimaryReferenceTag)圖2中灰色圓點和8個相鄰的次參考標簽(SecondaryReferenceTag,圖2中白色圓點)組成。改進算法中,分層結構可以根據實際跟蹤標簽數量作具體調整。

圖2 改進的LANDMARC
算法具體定位過程可以分為如下4個步驟:
① 確定跟蹤標簽所在的定位子區域。假設有p個主參考標簽,由式(1)、(2)計算跟蹤標簽和主參考標簽之間的距離矢量D=(D1,D2,…,Dp),對D中各分量排序,最小歐式距離對應的主參考標簽所在區域就是所求的定位子區域。
② 每一個定位子區域可以進一步分成4個定位區域,如圖3所示。
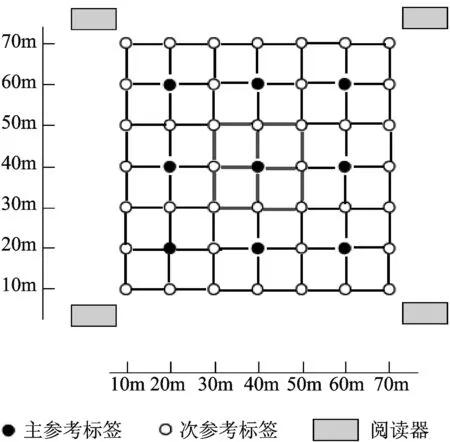
圖3 進一步細化區域的參考標簽布局
假設在式(1)中確定的主參考標簽為PTk,選取PTk周圍相鄰的8個次參考標簽,計算8個次參考標簽和跟蹤標簽之間的歐氏距離,選出距離跟蹤標簽最近的次參考標簽ST1。在剩余的7個次參考標簽中選出與跟蹤標簽次近的次參考標簽,同時這個標簽必須是ST1的兩個相鄰的標簽之一。這樣確定了1個主參考標簽和2個相鄰的次參考標簽,也就確定跟蹤標簽所在的矩形區域。由上述定位步驟可知,這個矩形區域由1個主參考標簽PTk和3個相鄰的次參考標簽(ST1、ST2、ST3)組成。
③ 使用k-最近鄰算法和加權算法計算跟蹤標簽的位置。這里式(3)中k=4時:
(5)
改進算法把參考標簽分為主參考標簽和次參考標簽這兩層,逐層搜索跟蹤標簽的最近鄰居,實現快速定位。
④ 為了進一步減小改進算法的定位誤差,提高定位精度,引入修正誤差向量的概念。通常情況下,跟蹤標簽和最近鄰居距離不超過1m,因此可以近似認為兩者定位誤差向量相同。可以用它修正式(5)計算得到的跟蹤標簽坐標。


(6)
由式(6)變換得到修正后的跟蹤標簽計算坐標:

(7)
3.2 改進的LANDMARC系統硬件
改進算法選擇RF Code公司的M100標簽[5]和M250閱讀器[6]。M100標簽實物如圖4所示。

圖4 RF Code M100標簽

圖5 RF Code M250閱讀器
M100屬于有源標簽,其典型傳輸范圍為90 m,工作頻率為433.92 MHz。M100標簽中安裝了防拆開關,因此較適合用于物品的跟蹤。在低速狀態下,標簽電池壽命可達5~7年之久。
M250閱讀器實物如圖5所示。M250閱讀器直接提供射頻信號強度值,可以同時監視1400個信標速率為10 s的標簽。
M250閱讀器有多種接口形式傳輸數據[7-8],可通過USB口、有線以太網接口,也可使用閱讀器內部集成的802.11b/g無線網卡。閱讀器支持加密連接(HTTPS和SSH),并支持以太網供電(PoE)RF Code M250閱讀器產品接口如圖6所示。

圖6 RF Code M250閱讀器產品接口
實驗中,將M250閱讀器以太網接口連接到路由器的LAN口,采用TCP/IP協議傳輸數據。路由器把所有標簽的信號強度數據通過網絡轉發到后臺處理計算機上。計算機端編程實現RFID定位管理平臺,可通過Internet獲取標簽數據,實現節點的遠程控制和管理,并進行定位參數設置、數據處理、定位結果顯示。定位平臺基于.NET Framework 4.0,采用C#編程語言實現。基于.NET Framework 4.0的定位管理平臺如圖7所示。
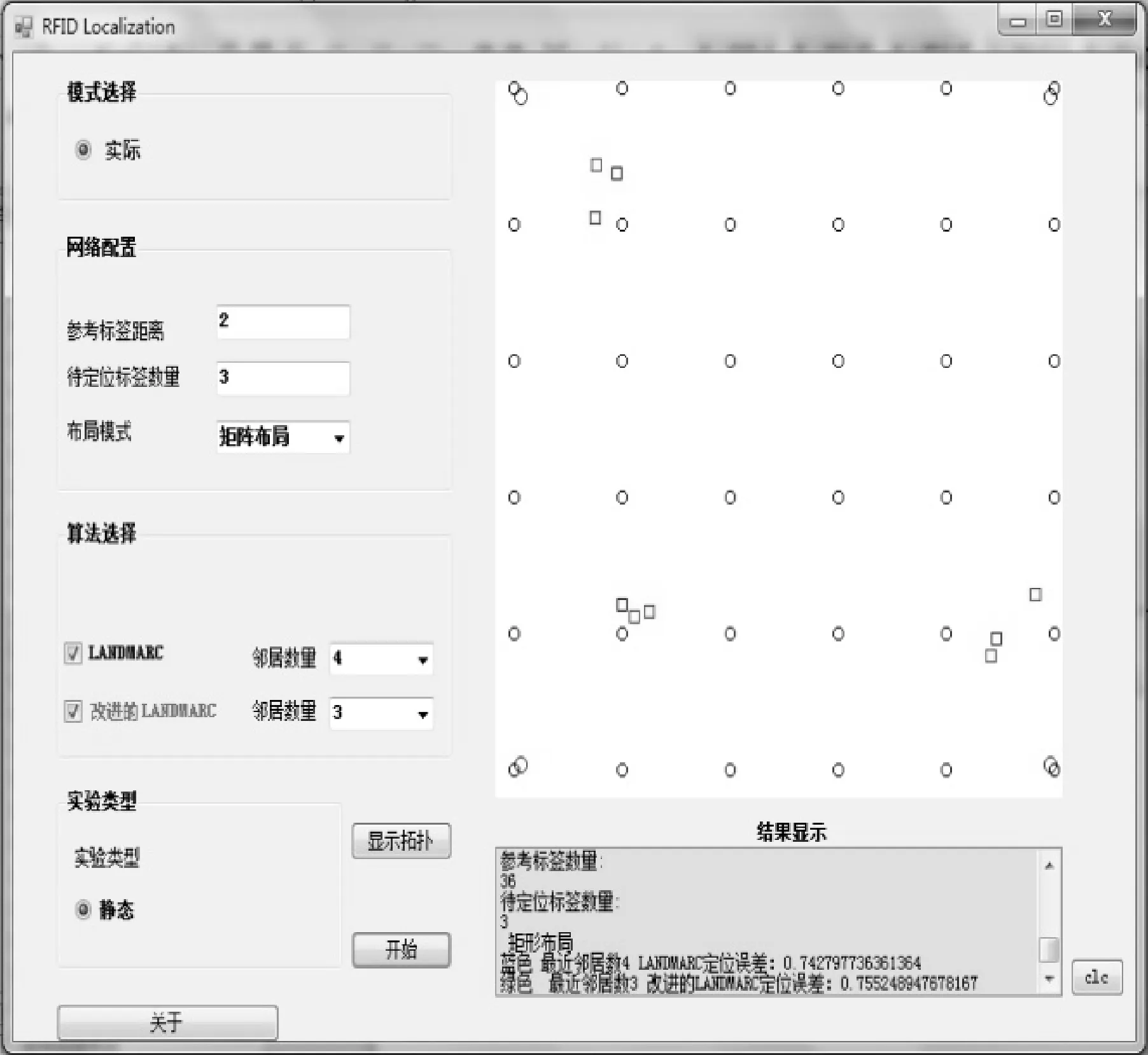
圖7 基于.NET Framework 4.0的定位管理平臺
4 實驗和討論
圖8展示了10次實驗,系統分別應用兩種算法得到的誤差比較圖。在第5次實驗中,原始算法誤差為0.97 m,改進算法誤差為0.65 m,改進算法定位誤差減少32.7%。另外,在其余各次實驗中,改進算法也均有10%以上的精度提高,改進算法的定位精度整體高于原始算法。兩種算法誤差比較如圖8所示。
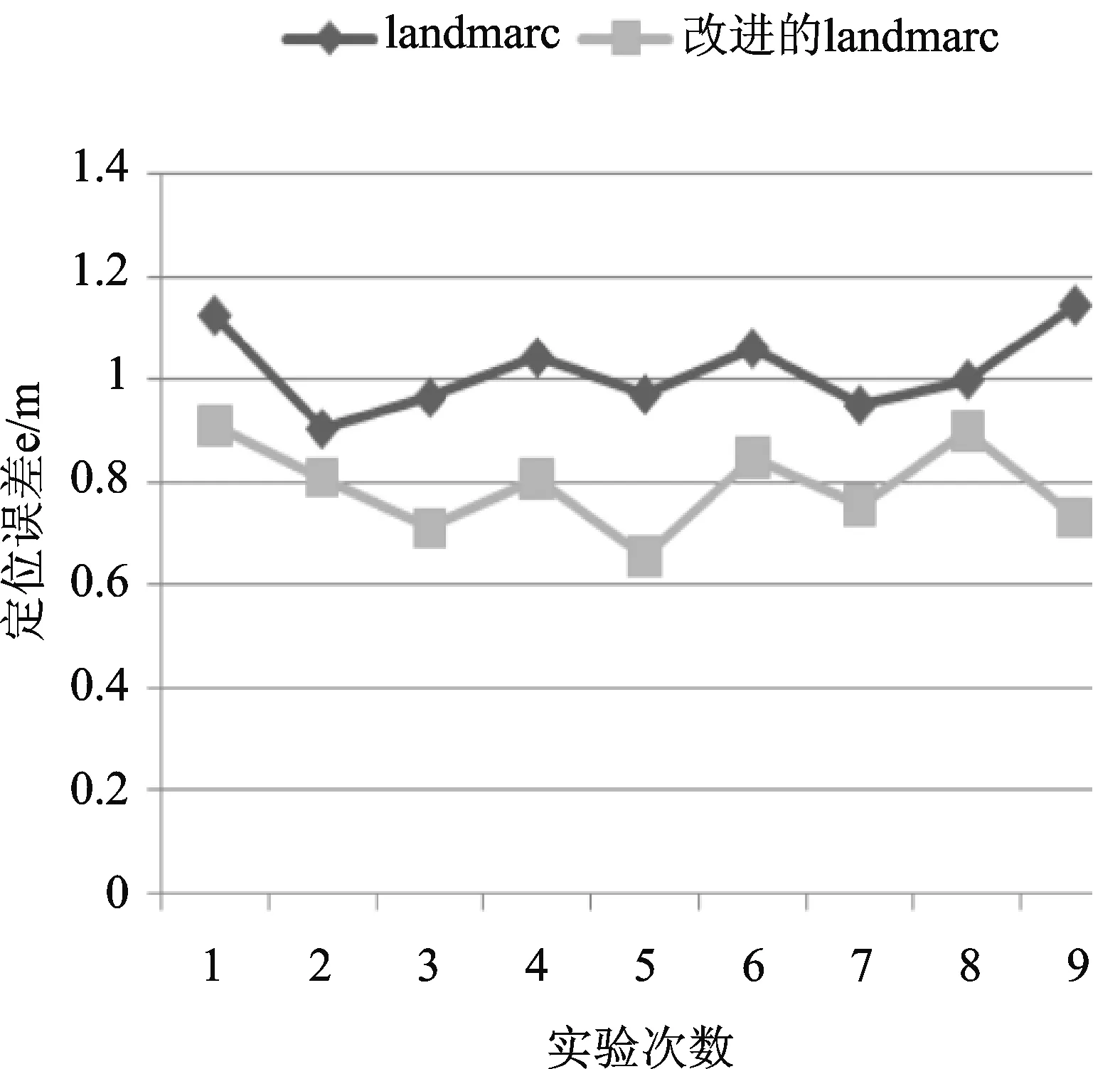
圖8 兩種算法誤差比較
改進算法利用參考誤差修正跟蹤標簽的計算
An Improved Indoor Item Localization Method Based on RFID
Alhakami Wail, Xu Bangzhen, Wu Zhefu
(College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China)
This article describes the LANDMARC location system based on RF location technology. The algorithm classifies an RFID tag which based on the original algorithm, then it introduces the concept of the reference error to improve positioning accuracy. Improved algorithm combines with RF code hardware company to formats positioning system. Experimental results show that the improved algorithm can reduce the positioning time and improve the positioning accuracy.
RFID indoor positioning; LANDMARC positioning system; tag classification; reference error
浙江省自然科學基金LY13F010011資助。
TN925
A
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15