在軌攔截器停泊軌道優(yōu)化研究
2014-09-15 05:44:36武健劉新學舒健生姚挺王漢坤
飛行力學 2014年3期
武健, 劉新學, 舒健生, 姚挺, 王漢坤
(1.第二炮兵工程大學 906教研室, 陜西 西安 710025;2.第二炮兵駐西安地區(qū)軍事代表室, 陜西 西安 710065;3.第二炮兵裝備部, 北京 100085)
0 引言
隨著空間軍事應用逐步從信息保障向空間作戰(zhàn)的拓展,軌道機動作戰(zhàn)成為一種新的作戰(zhàn)模式。軌道攔截作為軌道機動的典型作戰(zhàn)模式就是對己方的攔截器施加沖量,使其變軌打擊敵方的空間目標航天器,從而達到作戰(zhàn)目的[1]。在軌攔截器變軌前運行在停泊軌道(駐留軌道),停泊軌道的變化使得在軌攔截器有效攔截區(qū)域的變化,導致覆蓋控制的空間目標航天器不同。停泊軌道的優(yōu)化使在軌攔截器覆蓋盡量多的空間目標,可提高對敵威懾能力,具有一定的研究價值。
軌道轉移作為在軌攔截器停泊軌道優(yōu)化的基礎,國內外學者就其開展了相關研究。文獻[2]提出了利用遺傳算法求解多脈沖最優(yōu)交會問題;雪丹等[3]就衛(wèi)星可達范圍進行了研究;文獻[4]建立了基于變步長的二沖量攔截模型和小生境遺傳算法的多脈沖優(yōu)化模型;文獻[5]給出了變軌時刻給定的情況下,最小能量攔截軌道的解析計算模型。目前,理論成果多集中在軌道轉移、可達范圍研究等方面[6-7],對停泊軌道優(yōu)化研究開展較少。
脈沖軌道機動在工程上易于實現(xiàn),是各種軌道機動設計的基礎[2-3]。本文在假設攔截過程為單脈沖攔截的基礎上,建立了基于模矢法的單脈沖最小能量攔截模型;在單脈沖攔截優(yōu)化模型的基礎上,針對軌道根數(shù)在連續(xù)空間中優(yōu)化及軌道根數(shù)中參數(shù)物理含義不盡相同的特點,建立了基于正交粒子群優(yōu)化算法(Orthogonal Particle Swarm Optimization, OPSO)[8-10]的在軌攔截器停泊軌道優(yōu)化模型。
1 基于模矢法的單脈沖攔截優(yōu)化模型
首先假設:(1)地球為均勻球體,半徑Rc=6371 km;(2)僅考慮地球引力,忽略其他攝動力的影響;(3)脈沖施加過程瞬間完成,忽略脈沖施加過程中在軌攔截器位置的變化;(4)在軌攔截器提供的脈沖幅值較小,可提供不超過Δvmax任意方向的脈沖。
根據(jù)Lambert定理,在軌攔截器和空間目標航天器軌道根數(shù)已知的情況下,單脈沖攔截速度沖量可表示為變軌時間ts、攔截時間tf的函數(shù),單脈沖攔截優(yōu)化模型[11]為:
(1)
本文采用模矢法對單脈沖攔截模型進行優(yōu)化求解。模矢法是一種直接法,易于計算機編程,具有加速移向最優(yōu)點的特性及較快的收斂性[12]。基于模矢法的單脈沖攔截優(yōu)化模型計算步驟為:
(1)給定初始基點B1=(ts1,tf1),以該點為基點進行探索,設定步長(Δ1,Δ2)=(Δts1,Δtf1);
(2)計算目標函數(shù)值J(B1),通過式(2)確定臨時矢點T11:
T11=
(2)
對tf進行類似攝動,由臨時矢點T11代替原基點B1。兩個變量完成攝動后,得到臨時矢點T12并令B2=T12,由B1和B2得到第一個模矢。
(3)將第一個模矢延長一倍,得到第二個模矢的初始臨時矢點T20=B1+2(B2-B1)。在T20附近進行類似探索,建立臨時矢點T21和T22。以T2n為第三個基點B3,則B2和B3確立了第二個模矢。第三個模矢的初始臨時矢點T30=B2+2(B3-B2)。
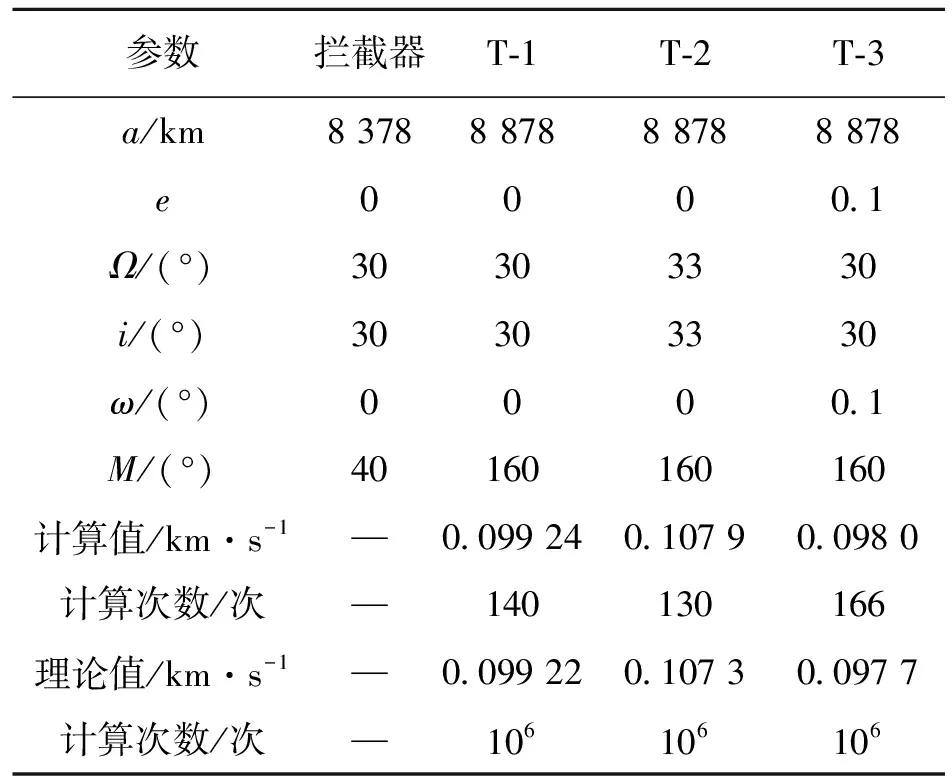
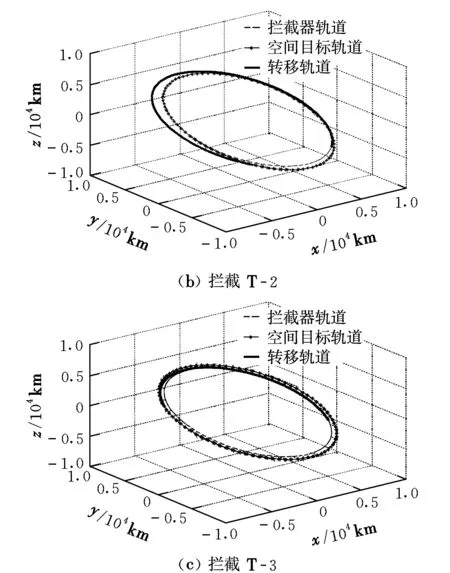
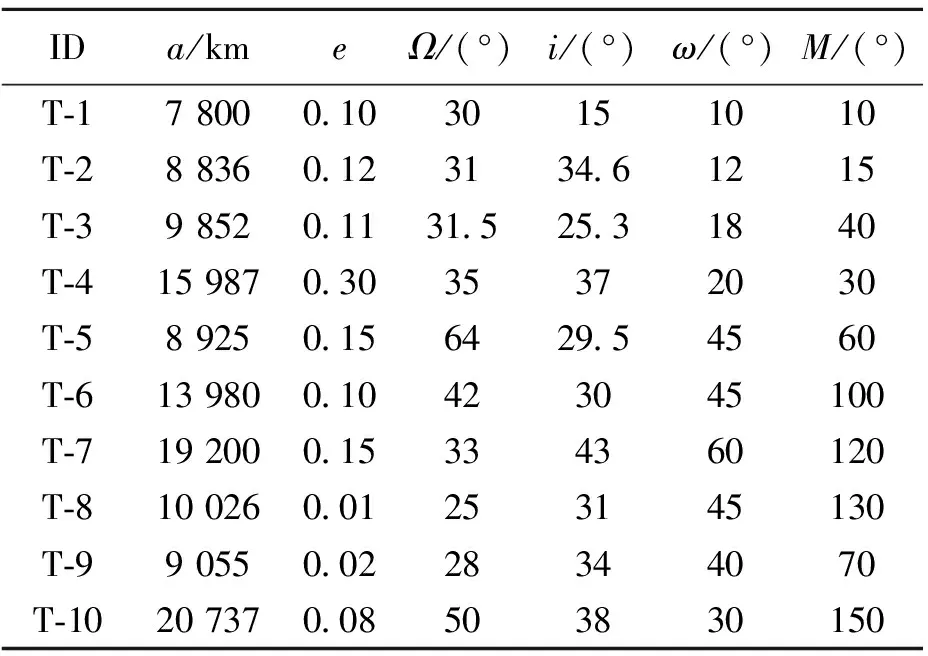
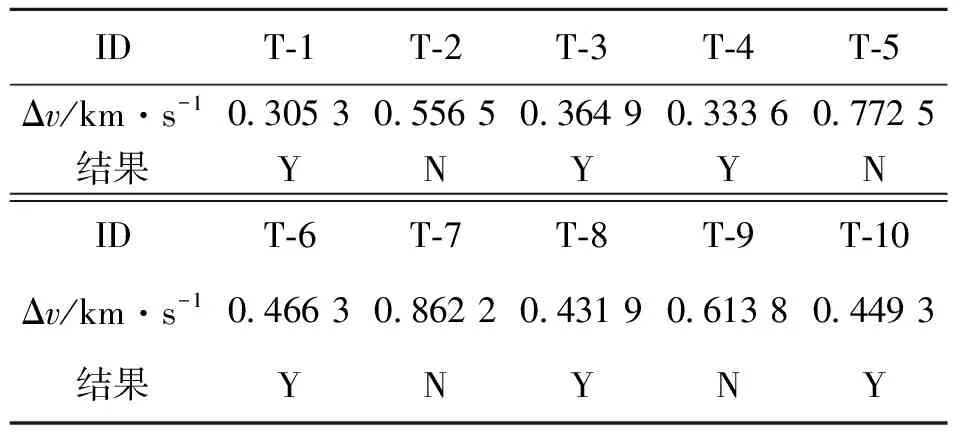
(4)重復步驟(2)和(3)。對于第i個模矢,如果滿足J(Ti0) 由于單脈沖攔截計算較為復雜,為了防止迭代過程中陷入局部最優(yōu)解,采用分區(qū)搜索方法,分區(qū)搜索的方法可以減少陷入局部最優(yōu)解的概率。 在軌攔截器停泊軌道優(yōu)化過程為通過對軌道根數(shù)的迭代搜索,使研究的指標達到最優(yōu)。本文考慮覆蓋目標數(shù)和攔截總能量兩個指標。 覆蓋目標數(shù)越多,則對敵威懾越大。假定有K個空間目標航天器集合S={s1,s2,…,sK},則以覆蓋目標數(shù)為指標的停泊軌道優(yōu)化模型數(shù)學描述為: (3) 式中,xi為空間目標航天器si是否被覆蓋的標識符;Δvoi由基于模矢法的單脈沖攔截優(yōu)化模型求解。 假定覆蓋的空間目標航天器集合為S′={s1,s2,…,sK′}(K′為覆蓋的目標數(shù)),在此基礎上通過對停泊軌道再調整,使在軌攔截器攔截所有覆蓋目標所需的總能量最小。能量越小則在軌攔截器的軌道保持能力越強,更長時間保持在停泊軌道。以攔截所需總能量為指標的停泊軌道優(yōu)化模型數(shù)學描述為: (4) 式中,sum為求和函數(shù)。 粒子群算法(Particle Swarm Optimization, PSO)原理簡單、所需參數(shù)較少,適合求解連續(xù)解空間中的尋優(yōu)問題。PSO在進化初期收斂快,容易陷入局部最優(yōu)解;后期收斂慢,收斂精度低。若加速系數(shù)或最大速度參數(shù)設置過大,容易錯過最優(yōu)解。在軌攔截器停泊軌道優(yōu)化的基礎模型為基于模矢法的迭代算法,對算法的計算速度有更高要求。因此,本文將正交試驗的思想加入PSO提高算法速度,即正交粒子群優(yōu)化算法(OPSO)。 OPSO是基于種群的迭代算法,種群初始解對算法有直接影響。PSO的初始種群在解空間內隨機產生;OPSO利用正交試驗表產生初始種群,使初始解分布更均勻,每代迭代完成后,對全局最優(yōu)解加入正交搜索機制,提高算法效率。基于OPSO的停泊軌道優(yōu)化涉及粒子構造、正交種群產生、適應度計算、正交搜索及速度和位置更新等5個問題。 (1)粒子構造。本文采用實數(shù)編碼方式,每個粒子對應一組6維向量(軌道根數(shù)),記為oi=(ai,ei,Ωi,ii,ωi,Mi)。 (2)正交種群的產生。初始化過程中希望個體盡可能地均勻分散在整個可行解空間上,使得算法能夠在可行解空間上進行均勻搜索。將每一維變量作為一個因素,根據(jù)可行域的大小、維數(shù)以及要求精度選擇合適的正交表生成初始種群。微粒oi的編碼為6維向量,則每個微粒有6個因子。將連續(xù)因子平均離散化為Qi個水平,則初始種群利用正交表LM(QN)產生M個粒子[13]。 (3)粒子適應度計算。將覆蓋目標數(shù)N及覆蓋目標中攔截剩余能量作為粒子oi的適應度,即: fit(oi)={N,sum(Δvi1,Δvi2,…,Δvin)} (5) (4)正交搜索。以種群最優(yōu)解opto=(ag,eg,Ωg,ig,ωg,Mg)為中心,給定opto搜索鄰域空間[Lopto,Uopto]。將上下限作為6維向量的兩個水平,利用正交表LM(26)在鄰域空間進行搜索,更新opto。 (5)粒子的速度和位置更新。由式(3)和式(4)可知,粒子適應度為有優(yōu)先度的雙目標優(yōu)化問題,因此非劣解按式(6)規(guī)則產生: 由粒子i迭代過程最優(yōu)解optoi和種群全局最優(yōu)解opto得到粒子的速度和位置更新如下: (7) 式中,ω為慣性權重系數(shù);c1,c2為加速系數(shù);r1,r2為[0,1]范圍內變化的隨機數(shù);j為迭代次數(shù)。 綜上所述,基于OPSO的在軌攔截器停泊軌道優(yōu)化步驟為: (1)利用空間目標航天器信息確定在軌攔截器軌道根數(shù)的大致變化范圍; (2)根據(jù)在軌攔截器軌道根數(shù)的大致變化范圍及種群粒子個數(shù),選擇相應的正交表產生初始化微粒群,對每個微粒產生一個初始速度,并計算其適應度; (3)滿足終止條件即結束迭代,否則轉入步驟 (4); (4)計算粒子自身最優(yōu)解pbi和種群最優(yōu)解pg; (5)以種群最優(yōu)解為中心進行正交搜索,計算適應度,選出其中最優(yōu)解替代pg; (6)更新粒子的速度和位置,返回步驟(3)。 表1基于模矢法的單脈沖攔截優(yōu)化模型計算結果與理論值基本吻合,且運算次數(shù)大大降低,說明模矢法能夠快速有效的解決單脈沖攔截優(yōu)化問題。 表1 基于模矢法的單脈沖攔截仿真結果Table 1 Simulation results of single-pulse interceptionbased on pattern search 圖1 攔截過程Fig.1 Interception process 本文采用STK構造10個空間目標航天器T-1~ T-10,軌道數(shù)據(jù)如表2所示。設在軌攔截器提供的最大速度沖量Δvmax=0.5 km·s-1。利用L27(36)正交表產生種群數(shù)為27的初始種群[13],其中6個因子的3個水平如表3所示。OPSO參數(shù)設置為:c1=c2=1,ω=1,最大迭代次數(shù)N=50,終止條件為最大代數(shù)或5代優(yōu)化指標不變。采用OPSO對在軌攔截器的停泊軌道進行優(yōu)化,得到優(yōu)化軌道(a,e,Ω,i,ω,M)=(11 814 km, 0.387, 32.72°, 33.8°, 55.4°, 188.27°),優(yōu)化指標為(6, 2.351 3)。仿真結果如表4、圖2和圖3所示。 表2 空間目標航天器軌道數(shù)據(jù)Table 2 Orbit data of space targets 表3 軌道根數(shù)的3個水平Table 3 Three levels of orbit element 表4 單目標攔截仿真結果Table 4 Simulation results of single-target interception 圖2 在軌攔截器軌道優(yōu)化Fig.2 Orbit optimization 圖3 優(yōu)化指標迭代曲線Fig.3 Index optimization iterative curve 從表4、圖2、圖3的仿真結果可以看出,在軌攔截器駐留在優(yōu)化軌道,可以覆蓋仿真中設計空間目標航天器中的6個(T-1,T-3,T-4,T-6,T-8,T-10),有效地提高了在軌攔截器的威懾效能。 從圖3的仿真結果可以看出,正交粒子群算法在迭代10次后收斂,而基本粒子群算法迭代了20次后收斂。仿真結果表明,正交粒子群算法較基本粒子群算法有更快的收斂速度,更適合求解在軌攔截器停泊軌道優(yōu)化這類算法復雜問題。 開展在軌攔截器停泊軌道的優(yōu)化研究對于最大程度地發(fā)揮其威懾性和作戰(zhàn)效能具有一定意義。本文在分析在軌攔截器停泊軌道優(yōu)化問題特點的基礎上,建立了基于模矢法的單脈沖攔截優(yōu)化算法。該算法運算速度較快,為停泊軌道的優(yōu)化提供了基礎。同時,為了加快算法收斂速度,將正交試驗思想加入粒子群算法中,建立了基于正交粒子群算法的停泊軌道優(yōu)化模型,并進行了仿真驗證,仿真結果驗證了文中模型的有效性。文中模型能夠為未來空間作戰(zhàn)中在軌攔截器的部署提供技術支撐,具有一定的理論意義和軍事價值。 參考文獻: [1] 曹裕華,馮書興,管清波.航天器軍事應用建模與仿真[M].北京:國防工業(yè)出版社,2010:3-5. [2] 齊映紅,曹喜濱.基于遺傳算法的最優(yōu)多脈沖交會軌道設計[J].哈爾濱工業(yè)大學學報,2008,40(9):1345-1349. [3] 雪丹,李俊峰,寶音賀西.平面脈沖作用下衛(wèi)星軌道的可達范圍研究[J].宇航學報,2009,30(1):88-92. [4] 丁濛,童若鋒,董金祥.大范圍軌道機動的燃料消耗優(yōu)化方法[J].航天控制,2008,26(6):47-53. [5] 白洪波,馮書興,朱麗萍,等.空間作戰(zhàn)中固定時間軌道攔截的仿真研究[J].航天控制,2006,24(4):62-66. [6] Kamel O M,Soliman A S.On the optimization of the generalized coplanar Hohmann impulsive transfer adopting energy change concept [J].Acta Astronautica,2005,56(4):431-438. [7] Wu Bao-lin,Wang Dan-wei.Nonlinear optimization of low-thrust trajectory for satellite formation: legendry pseudo-spectral approach[J].Journal of Guidance,Control,and Dynanics,2009,32(4):1371-1381. [8] 薛明志,左秀全,鐘偉才,等.正交微粒群算法[J].系統(tǒng)仿真學報,2005,17(12):2908-2911. [9] 劉衍民,趙慶禎,牛奔.基于正交設計的多目標粒子群算法[J].計算機應用研究,2011,28(1):72-75. [10] Coello C A C,Pulido G T,Lechuga M S.Handling multiple objectives with particle swarm optimization [J].IEEE Transactions on Evolutionary Computation,2004,8(3):256-279. [11] 袁建平,和興鎖.航天器軌道機動動力學[M].北京:中國宇航出版社,2010:212-217. [12] 甘應愛,田豐,李維錚.運籌學[M].北京:清華大學出版社,2005:171-173. [13] 吳翊,李永樂,胡慶軍.應用數(shù)理統(tǒng)計[M].長沙:國防科學技術大學出版社,2005:235-239.2 基于OPSO的停泊軌道優(yōu)化
2.1 問題描述及指標確定
2.2 基于OPSO的停泊軌道優(yōu)化

3 仿真試驗及結果分析
3.1 試驗1


3.2 試驗2


4 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
