導彈大空域螺旋機動的變結構制導律研究
2014-09-17 06:49:20高曉冬趙紅超宋貴寶
飛行力學 2014年2期
高曉冬, 趙紅超, 宋貴寶
(1.海軍裝備部兵器部 導彈處, 北京 100841;2.海軍航空工程學院 703教研室, 山東 煙臺 264001;3.海軍航空工程學院 101教研室, 山東 煙臺 264001)
0 引言
機載發射的超聲速反艦導彈發射空域范圍很大,發射高度范圍從幾千米到十幾千米,以放寬對戰斗機發射條件的限制,實現戰斗機的快速發射和返航。反艦導彈的自控段彈道通常是一種高、低結合的大空域變軌彈道[1],大空域變軌彈道一般分為四段:爬升段、高空巡航段、降高段和低空巡航段。它是一種三維空間彈道軌跡,不僅在縱向平面上包括高空彈道和低空彈道,而且在航向平面上也跨越了幾千米到十幾千米的范圍,增加了飛行彈道的空域范圍和靈活性。前人已經對大空域變軌彈道設計方法進行了一些研究,利用虛擬目標引導反艦導彈實現大空域變軌彈道[2-7]。為了保證反艦導彈大空域變軌的各段彈道平穩交接、平滑過渡,在虛擬目標制導律設計時同時考慮了脫靶量要求和末端落角要求。
前人設計的大空域變軌彈道是將反艦導彈的飛行彈道簡單地擴展為三維空間的飛行彈道,雖然反艦導彈的飛行空域范圍明顯增大了,但是反艦導彈的自控段飛行彈道變化小,機動性不強,敵方的遠程艦空導彈很容易攔截我方的反艦導彈。鑒于反艦導彈采用螺旋機動方式時突防效果最好,為了提高反艦導彈的突防能力,借鑒導彈末端機動方面的研究成果[1,8],將螺旋機動引入到大空域變軌彈道中,將其改進為大空域螺旋機動彈道。具體而言,反艦導彈在大空域變軌彈道的爬升段和高空巡航段距離目標較遠,不會被攔截,不需要機動;降高段正好是遭遇遠程艦空導彈攔截的階段,因此將反艦導彈的降高段改進為螺旋機動降高彈道。大空域變軌彈道屬于反艦導彈的自控段彈道,其后轉為自導段彈道。
在前期的研究中,降高段是采用虛擬目標制導律產生過載控制指令,引導控制反艦導彈完成的。歸納起來,虛擬目標制導律主要包括三種制導律:擴展比例導引律、變結構制導律和最優制導律;其中的變結構制導律物理意義最直觀明了,因此本文在其基礎上提出了一種“帶螺旋機動的變結構制導律”,以解決螺旋機動降高彈道向低空巡航段彈道的過渡問題。具體實現方法為:將低空巡航段的起點看作是虛擬目標,設計帶螺旋機動的變結構制導律產生控制指令,控制反艦導彈在俯沖追蹤虛擬目標的過程中伴隨著螺旋機動,從而提高了反艦導彈的機動突防能力,而且制導末端又能夠平穩地過渡到低空巡航段彈道。
1 帶落角約束的變結構制導律設計
為了便于分析,采用國內外研究者通常采用的如下假設[9-10]:
假設1:導彈和目標均視為質點;
假設2:導彈和目標的加速度矢量分別與它們的速度矢量垂直,即施加在導彈和目標上的加速度矢量僅改變其速度的方向而不改變速度的大小,采用空氣動力控制的導彈和目標大多是與此假設相符的;
假設3:忽略導彈的動態特性,因為通常導彈的動態特性比制導回路的動態特性要快得多。
需要說明的是,這里所說的目標并不是實際艦艇目標,而是虛擬目標,是為了實現大空域變軌彈道而人為設置的,因此目標參數是完全已知的。對于導彈制導問題,視線角速率為零代表了理想狀態,可保證脫靶量最終為零,而通過使視線角誤差為零,可使末端落角滿足要求。
為了簡化制導律的設計,將反艦導彈與虛擬目標的空間相對運動分解為縱向平面和航向平面內的相對運動,分別設計縱向平面和航向平面的變結構制導律。在縱向平面內,反艦導彈與虛擬目標的相對運動方程為:
(1)
式中,r1為縱向平面內的彈目相對距離;q1為縱向平面內的視線角;vT,vM分別為虛擬目標和反艦導彈的速度大小;θT,θ分別為虛擬目標和反艦導彈的彈道傾角。一般地,虛擬目標為固定目標點或者水平勻速運動目標,即θT=0。
反艦導彈爬升段和降高段的制導目標是同時獲得零脫靶量和期望的末端落角。所以,變結構制導的滑模面中應包含這兩種因素,即:
(2)
對式(1)的第2個方程求導,并整理可得:

(3)
(4)
對式(2)求導,并將式(3)和式(4)代入,整理可得:

(5)
為了保證系統軌跡在有限時間內到達滑模面,并且在到達過程中具有良好的動態品質,采用如下的自適應趨近律方法來設計制導律:
(6)
式中,k1,ε1>0。聯立式(5)和式(6),求得縱向平面的帶落角約束的變結構制導律為:
(7)

在航向平面內,反艦導彈與虛擬目標的相對運動方程為:
(8)
式中,r2為航向平面內的彈目相對距離;q2為航向平面內的視線角;ψT,ψV分別為虛擬目標和反艦導彈的彈道偏角。選取變結構制導的滑模面為:
(9)
采用與縱向平面相同的求解過程,則可以求得航向平面帶落角約束的變結構制導律為:
(10)

2 帶螺旋機動的變結構制導律設計
(11)

(12)
式中,ω為機動頻率,縱向和航向采用同樣的機動頻率是實現螺旋機動形式的必要條件;Q1,Q2為機動幅度,具體表達式如下:
(13)
(14)
對式(11)求導,并將式(3)和式(4)代入,整理可得:

(15)
仍采用式(6)的自適應趨近律,可求得縱向平面內的帶螺旋機動的變結構制導律為:

(16)
同理可求得航向平面內的帶螺旋機動的變結構制導律為:

(17)
在工程應用中,為了削弱變結構制導律的顫振現象,通常對符號函數sgn(si)進行連續化處理,即以連續化函數si/(|si|+ζ)代替sgn(si),其中ζ為一小正數。
3 大空域螺旋機動彈道設計與仿真
某型超聲速反艦導彈的控制系統原理如圖1所示,它可以從高度范圍為7~12 km的任意高度上進行發射。在發射前,為導彈裝訂好高空虛擬目標和低空虛擬目標。高空虛擬目標設置在高空巡航段上,低空虛擬目標設置在低空巡航段上,虛擬目標做勻速直線運動。
圖1 反艦導彈控制系統原理示意圖Fig.1 Schematic diagram of control system of anti-ship missile
下面進行超聲速反艦導彈大空域螺旋機動彈道的仿真。在發射前,為反艦導彈裝訂好高空虛擬目標1和低空虛擬目標2。高空虛擬目標1的初始位置為:xT1=25 km,yT1=15 km,zT1=0 m;其運動參數為:vT1=350 m/s,θT1=ψT1=0°。低空虛擬目標2的初始位置為:xT2=210 km,yT2=300 m,zT2=0 m;其運動參數為:vT2=420 m/s,θT2=ψT2=0°。通過仿真調試,選取式(7)和式(10)中的參數分別為:c1=0.9,k1=1.4,ε1=0.4,c2=0.9,k2=1.2,ε2=0.3;選取式(16)和式(17)中的參數分別為:c1=0.8,Q10=0.01,ω=0.45,k1=1.0,ε1=0.8,c2=1.3,Q20=0.016,k2=1.3,ε2=0.8。反艦導彈從發射高度范圍內任意高度上發射都可以順利地完成大空域螺旋機動彈道,飛行中反艦導彈的各項性能指標均滿足要求。以7 km和12 km發射為例,給出反艦導彈大空域螺旋機動彈道的仿真結果如圖2和圖3所示。
圖2 7 km發射的反艦導彈大空域螺旋機動彈道Fig.2 Large-airspace spiral maneuver trajectory of anti-ship missile launched from 7 km
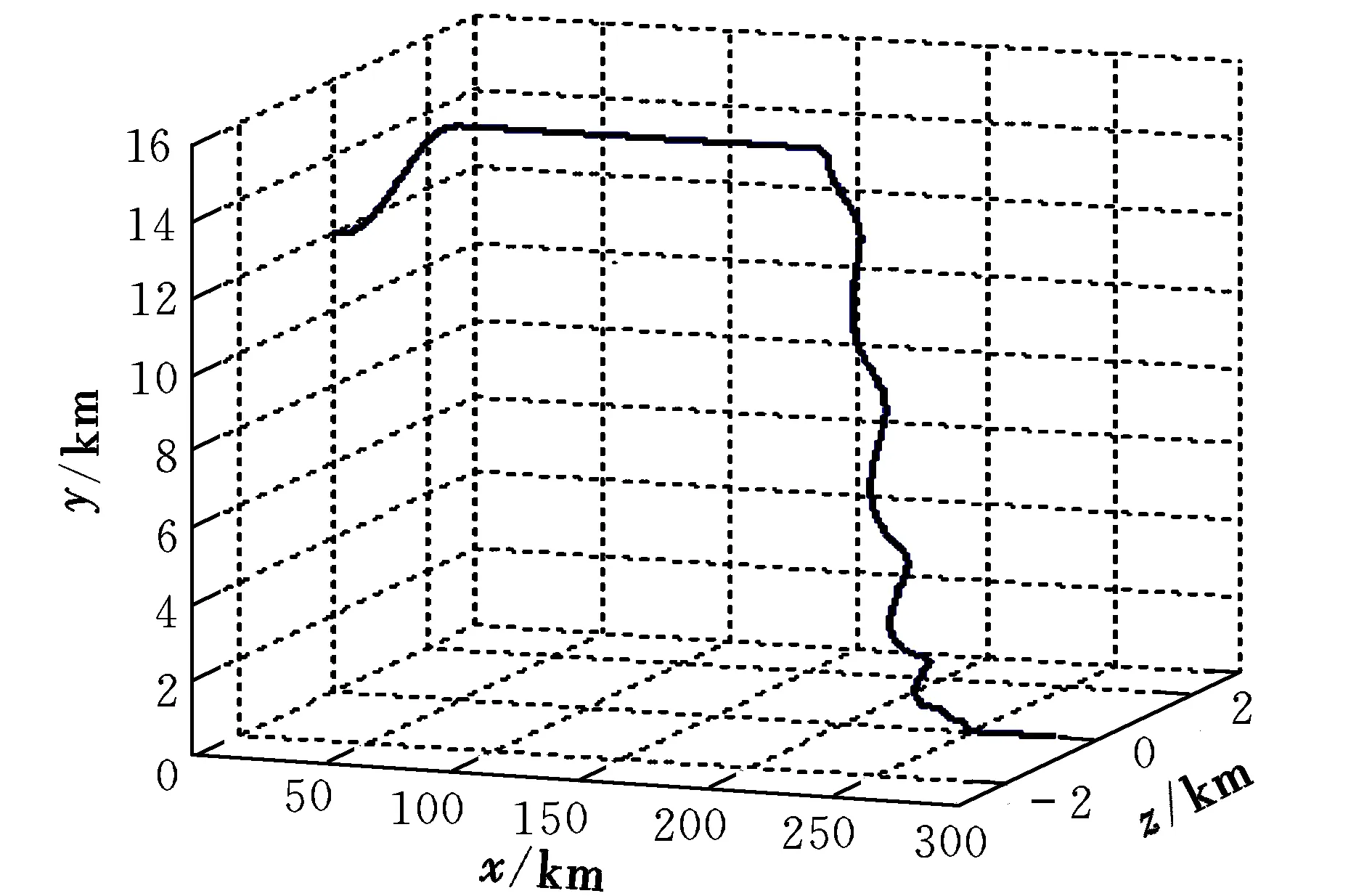
圖3 12 km發射的反艦導彈大空域螺旋機動彈道Fig.3 Large-airspace spiral maneuver trajectory of anti-ship missile launched from 12 km
為了檢驗反艦導彈采用大空域螺旋機動彈道的突防效果,進一步對單枚反艦導彈與單枚遠程艦空導彈的攻防對抗仿真進行了研究。通過多種不同攻防對抗條件下的仿真試驗,統計分析了反艦導彈采用大空域螺旋機動彈道的突防概率,以及采用以前的大空域變軌彈道的突防概率。在遠程艦空導彈攔截情況下,反艦導彈采用大空域螺旋機動彈道的突防概率為75.9%,而采用大空域變軌彈道的突防概率為39.8%。對比可得,前者的突防概率比后者提高了90.7%,這表明所提出的大空域螺旋機動彈道方案是很有效的,顯著地提高了反艦導彈針對遠程艦空導彈的突防概率。
4 結束語
本文將超聲速反艦導彈的自控段大空域變軌彈道改進為大空域螺旋機動彈道。在帶落角約束的變結構制導律的基礎上,提出并設計了一種帶螺旋機動的變結構制導律。進行了超聲速反艦導彈的大空域螺旋機動彈道仿真以及反艦導彈與遠程艦空導彈的攻防對抗仿真,仿真結果表明,所提出的大空域螺旋機動彈道顯著地提高了反艦導彈針對遠程艦空導彈的突防概率。下一階段將研究大空域螺旋機動彈道之后反艦導彈攻擊目標的自導段彈道設計問題,以及在自導段反艦導彈與近程艦空導彈的攻防對抗問題。
參考文獻:
[1] 趙紅超.超聲速反艦導彈變軌彈道的控制研究[D].煙臺:海軍航空工程學院,2005.
[2] 顧文錦,張翼飛.大空域機動的一種實現方法[J].航空兵器,2002,(2):10-12.
[3] 顧文錦,趙紅超.基于虛擬目標的反艦導彈的最優制導律研究[J].現代防御技術,2006,34(4):56-60.
[4] 顧文錦,雷軍委,潘長鵬.帶落角限制的虛擬目標比例導引律設計[J].飛行力學,2006,24(2):43-46.
[5] 畢蘭金,張國慶,顧文錦.變結構制導律在大空域變軌反艦導彈彈道中的應用[J].戰術導彈技術,2010,(2):73-76.
[6] Zhao Hongchao,Zhang Ruchuan,Yu Hongyun.Extended proportional navigation guidance law for anti-warship missile based on Lyapunov stability[C]//Proceedings of the 7th WCICA.Washington:IEEE Press,2008:8250-8254.
[7] 趙紅超,齊強,張文廣.反艦導彈大空域變軌的三維擴展比例導引律[J].指揮控制與仿真,2013,35(1):102-105.
[8] 范作娥.帶落角約束的反艦導彈末端導引與機動研究[D].煙臺:海軍航空工程學院,2012.
[9] Oh J H,Ha I J.Capturability of the 3-dimensional pure PNG law[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(2):491-503.
[10] 張友安,楊華東,胡云安.機動目標三維空間導引運動建模及導引律研究[J].飛行力學,2003,21(2):41-44.
