基于極限學習機的遙感影像陰影檢測
2014-09-18 00:15:18安鵬飛王蒙軍
電視技術 2014年15期
安鵬飛,王 霞,王蒙軍
(1.河北工業大學信息工程學院,天津300401;2.中國人民解放軍93658部隊,北京100041)
高分辨率遙感影像常被用于城市地區的測繪工作,隨著空間分辨率的不斷提升,陰影成為一個不能夠被忽略的因素,尤其是在太陽高度角較小時,陰影是遙感影像的一個重要組成部分[1]。雖然在許多城市遙感應用中不希望出現陰影,但是由于陰影自身的特點可以提供有用的信息。在航空測量學中,研究人員已經長期使用陰影信息來對建筑物進行檢測和高度估計,因此非常有必要對遙感圖像中的陰影進行預處理。陰影檢測是陰影處理的重要步驟之一,對后續的遙感圖像處理具有重要作用。
Jiang最早根據陰影區域的亮度低這一特點并結合陰影幾何特性對陰影進行檢測[2];Joshi利用支持向量機的方法,通過訓練分類器實現了陰影區域的檢測[3];Choi利用最大似然估計閾值法實現陰影區域的檢測[4];許妙忠利用紋理分析的方法,通過共生矩陣和相應指數的計算,對遙感影像中的陰影檢測做出了一個嘗試[5];張曉美利用多光譜影像中的光譜差異從ALOS全色圖像中提取到陰影信息[6];姜柯通過分析紋理邊緣結合抽樣推斷法實現了陰影區域的自適應檢測[7]。上述介紹的陰影檢測方法大多以陰影自身的性質為出發點,初步實現了陰影檢測,但是在檢測速度和精度方面往往不夠理想。
紋理在圖像分析中具有重要的作用,在模式識別中常被用來辨別圖像區域,紋理特征已被廣泛應用于圖像的分類識別[8],本文將輔以紋理特征的極限學習機[9](Extreme Learning Machine)作為分類器,將陰影紋理的能量、熵、對比度和逆差距4個指數作為輸入特征向量訓練學習機模型,實現遙感影像建筑物陰影檢測。
1 圖像特征選取
紋理特征表現地物的形狀、均質程度、方位以及不同類地物間的亮度關系和空間關系,對圖像中地物分類有很大作用。通常的紋理分析方法包括統計方法和結構方法。灰度共生矩陣是一種有效的紋理分析統計法,描述了一個像素和它周邊相鄰像素之間的灰度值關系。根據共生矩陣可以計算出大量的紋理指數,Haralick等定義了14種紋理指數,其中使用最廣的有以下4個:
能量(Energy):是灰度共生矩陣元素值的平方和,也稱角二階距,反映了圖像灰度分布均勻程度和紋理粗細度。當能量越大時,表明紋理模式是比較均勻和規則變化的。

熵(Entropy):是圖像所具有的信息量的度量,當空間共生矩陣中所有值均勻相等時,熵能夠取得最大值;熵表明了圖像中紋理的非均勻程度或復雜程度。

對比度(Contrast):體現為圖像的清晰度,即紋理清晰程度。在圖像中,對比度越大,紋理的溝紋越深,圖像的視覺效果越清晰,對比度小,則溝紋淺,效果模糊。

逆差距(IDM):度量圖像紋理局部變化的多少,反映圖像紋理的同質性,如果圖像不同區域之間缺少變化,即局部均勻,則逆差距的值就比較大。

從Google Earth上隨機下載選取一組樣本圖像,計算其灰度共生矩陣特征參數結果如表1所示。從陰影與非陰影區域計算對比結果來看,反映了各類紋理圖像的可區分性。

表1 圖像的紋理指數統計表
由于本實驗采用的圖像灰度級為256級,導致直接計算灰度共生矩陣計算量太大,所以采用將圖像壓縮到16級來計算,分別計算出4個紋理指數在0°方向、45°方向、90°方向和135°方向的灰度共生矩陣,然后取其平均值作為特征輸入向量。
2 ELM原理
2.1 基本思想
為克服傳統機器學習的缺點,Huang為SLFN(Singlehidden Layer Feedforward Neural Networks)提出了 ELM(Extreme Learning Machine)學習算法,是一種簡單易用、有效的單隱層前饋神經網絡新算法,在算法執行過程中不需要調整網絡的輸入權值以及隱元的偏置,其基本思想如下:
給定任意N個不同的樣本(xi,yi),其中xi=[xi1,xi2,…,xin]T∈ Rn,yi=[yi1,yi2,…,yim]T∈Rm,g(x)為激活函數,隱含層數目為L,則ELM的模型可以表示為

式中:j=1,2,…,N;wi=[wi1,wi2,…,win]T表示輸入節點和第i個隱含層節點的鏈接權重;βi=[βi1,βi2,…,βim]T表示第i個隱層節點與輸出節點的連接權重向量;bi表示第i個隱層節點的閾值。ELM模型的矩陣表示形式為
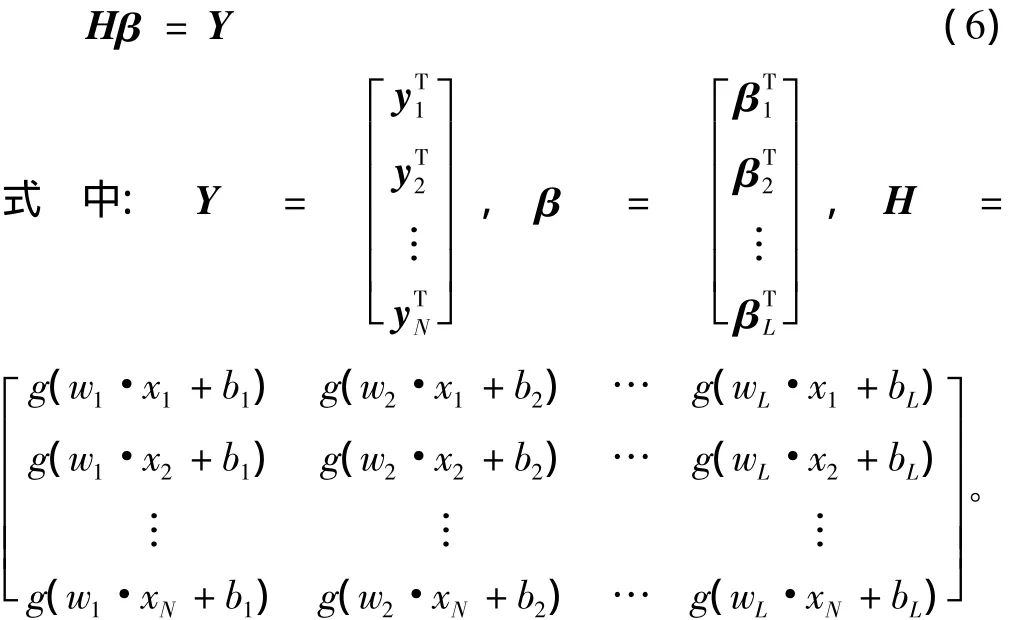
當激活函數g(x)無限可微時,權值w和b是可以隨機選擇的,且在訓練之中保持不變。因此訓練ELM就可以轉化為計算Hβ=Y的最小二乘解問題。
ELM算法有3個步驟:
1)確定隱含層神經元個數L;
2)選擇一個無限可微的函數作為隱含層神經元的激活函數g(x),進而計算隱含層輸出矩陣H;
3)計算輸出層權值^β(^β=H+·Y)。
2.2 隱層節點數確定
極限學習機隱節點的選取對實驗結果有很大影響,本文采取指數增長法結合區間折半搜索法來對隱層節點數進行選擇,主要分為兩步:
1)首先通過指數增長法找到隱層節點數的大致范圍。其中神經元數范圍是[p,q]=[2j-1,2j],初始值j=1,輸入權重和閾值隨機產生,輸出權重由最小二乘法計算獲得。
2)在第一步找到隱含層節點數大致范圍區間的基礎上,利用區間折半搜索法,每次取區間的中點即c=[(p+q)/2]左邊取整,計算網絡的輸出權值和誤差,進而計算網絡的輸出,確定出最優隱層節點個數。具體步驟如圖1所示。
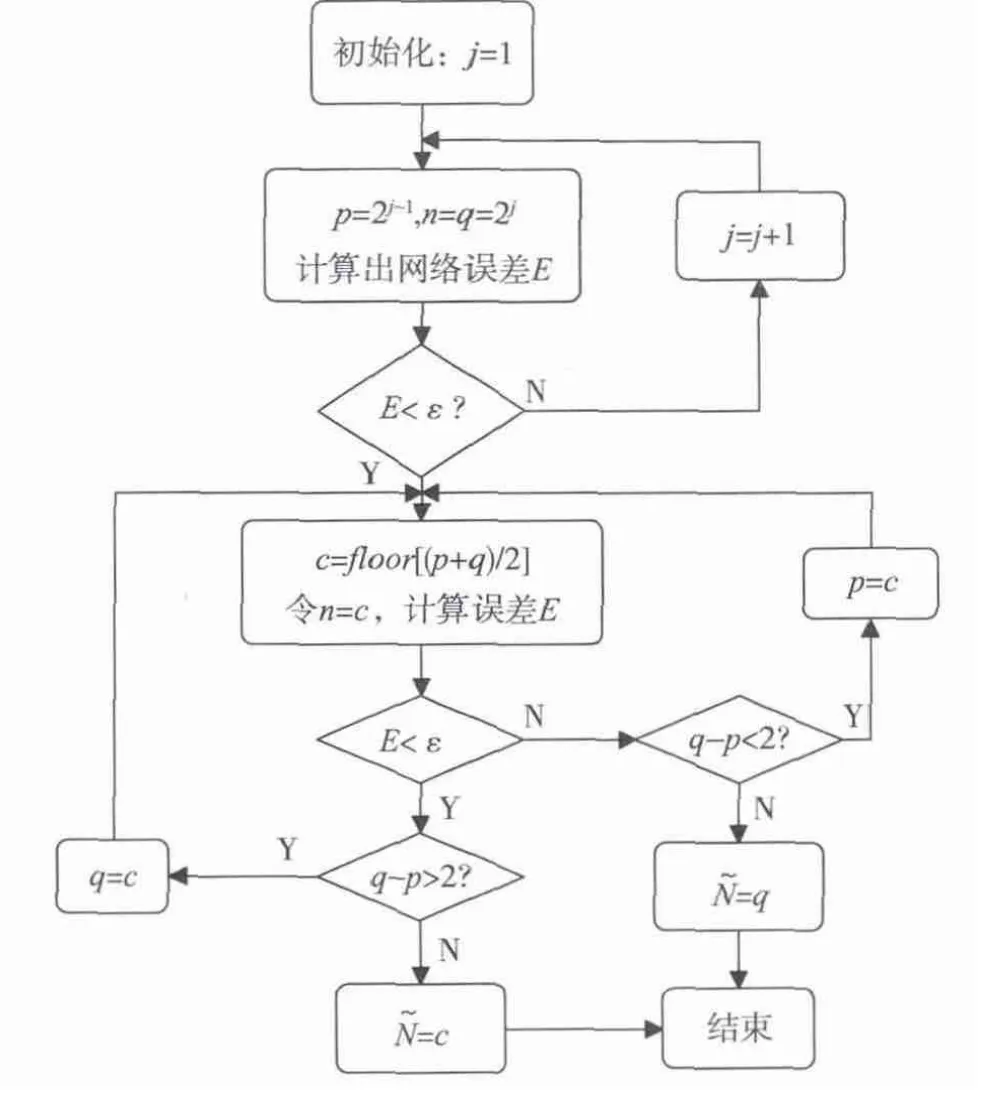
圖1 隱層節點訓練流程圖
在確定隱層節點后,就可以來對遙感圖像進行陰影檢測了。首先選擇訓練集圖像,在這里選擇兩類訓練樣本,第1類為陰影,第2類為非陰影,先將選取的樣本圖像進行直方圖均衡化預處理,然后采用分塊的方式,對每一小塊分別提取能量、熵、對比度和逆差距4種紋理指數,即用1個四維特征向量作為1個樣本輸入點。實驗選取了2×2,4×4,6×6,8×8的窗口大小,從實驗結果來看,當窗口大小為4×4時實驗效果好,將選擇好的特征向量來訓練ELM模型,然后將測試圖像輸入到訓練好的ELM分類器,最后得到陰影檢測結果圖。
3 實驗結果分析
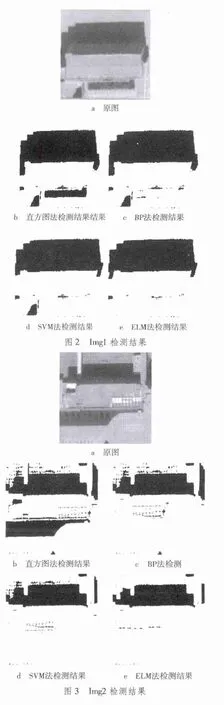
實驗中采用從Google Earth上隨機下載含陰影的遙感影像,然后利用ELM,BP,SVM和直方圖閾值法實現了許多實際陰影檢測,其中,ELM和BP的激勵函數都選擇“Sigmoid”函數,而SVM的核函數選擇徑向基函數,實驗數據的輸入一律歸一化到[0,1]范圍內,而輸出則歸一化到[-1,1]范圍內,BP算法選擇最快的Levenberg-Marquardt算法,SVM算法使用臺灣Lin的libsvm工具箱。實驗中所有算法都運行20次,結果取其平均值。由于篇幅限制,現只給出其中3幅圖像的檢測結果,為了更好地觀察實驗結果,將檢測到陰影區域用黑色表示,非陰影區域用白色表示,見圖2~圖4。
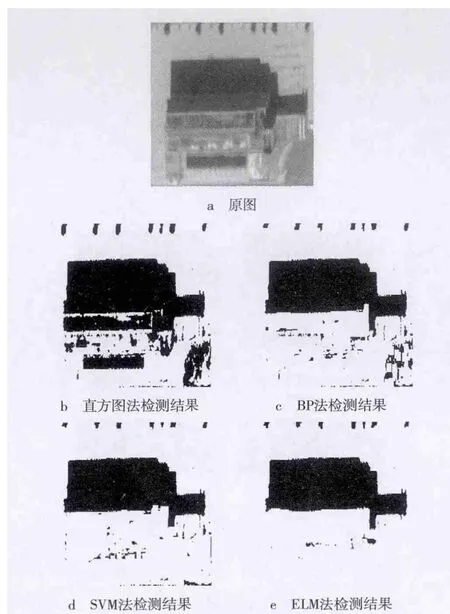
圖4 Img3檢測結果
本文采用Martel-Brinson提出的方法來對實驗結果進行分析,主要采用DR和FR兩個指標評估測試結果
式中:TN為正確識別陰影區域數目;FN表示將非陰影區域誤判為陰影區域數目;FS表示未被檢測到陰影區域數目;DR表示為陰影區域的正確檢測率;FR表示為陰影區域的漏檢率。當DR越大而FR越小時,證明檢測方法是好的檢測法。表2為ELM、BP、SVM和直方圖閾值法4種檢測法的DR、FR及測試時間的評估結果。在進行樣本訓練時,ELM算法用0.223 9 s得到訓練誤差均方根為0.003 5,SVM算法用0.441 0 s得到訓練誤差均方根為1.578 9,BP算法用127.370 8 s得到訓練誤差均方根為0.049 0。
通過實驗結果可以看出,直方圖閾值法容易將綠色草地和強反射性地物誤檢為陰影區域,BP和SVM法克服了這個缺陷,缺點是訓練時間長,且參數選擇復雜,容易出現過度擬合現象。相比較而言,ELM算法不僅克服了直方圖閾值法遙感圖像中草地、樹木等區域的誤判,在訓練及測試速度和參數選擇方面比傳統機器學習法有很大進步,具有較高的正確檢測率以及較小的漏檢率,獲得很好的泛化性能,從而提高了陰影檢測的精度。
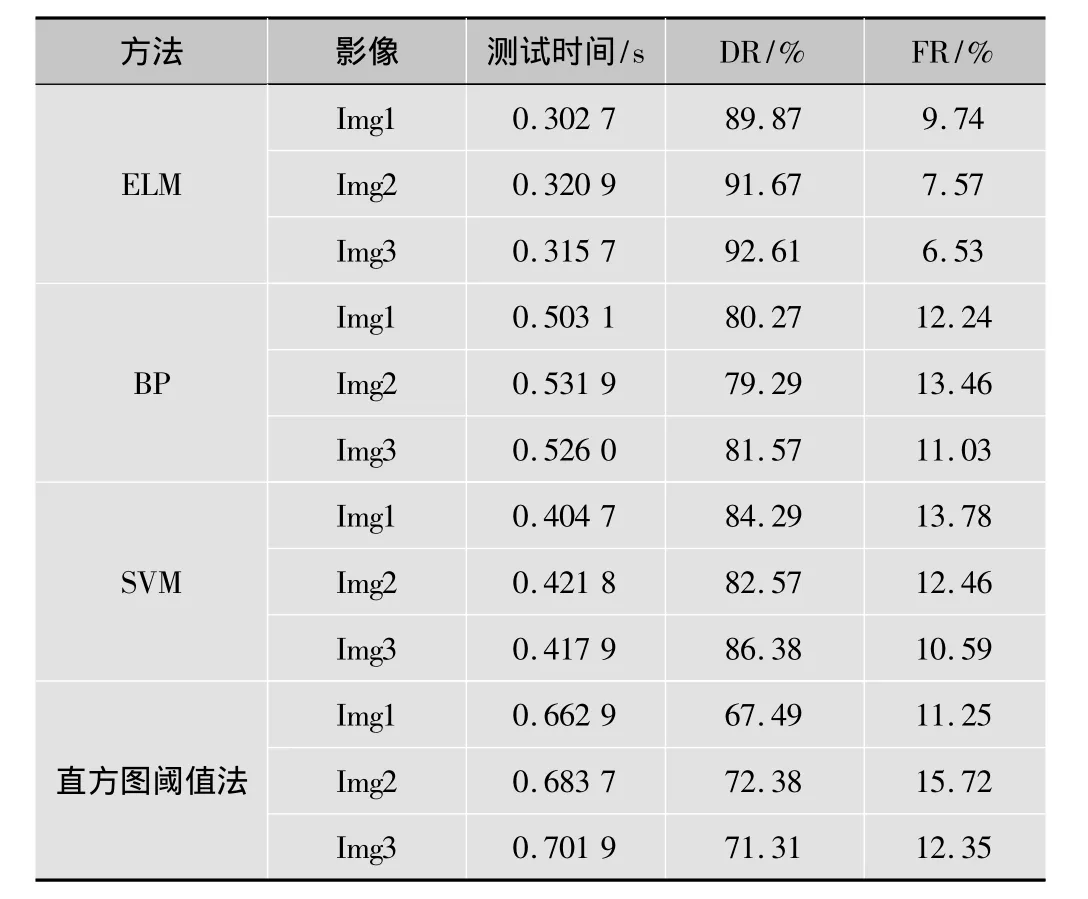
表2 3種方法的性能指標比較
4 結語
本文將輔以紋理特征的ELM算法模型用于陰影檢測和提取,紋理信息可以定量地描述結構特征,反映圖像灰度值的空間變化,實驗表明窗口方向對實驗結果影響不大,當窗口大小為4×4,步長為1時,能取得較好的實驗結果。ELM算法可以對輸入層權值和隱含層偏差賦隨機值,涉及的計算量很小,算法簡捷高效,得到的輸出權值是全局最優的,很好地解決了神經網絡訓練和測試速度不理想的缺陷。下一步打算將紋理和光譜特征組合作為新的特征與ELM算法相結合來實現陰影區域的檢測。
:
[1] YANG S,GREGORY N.Shadow detection and building-height estimation using IKONOS data[J].International Journal of Remote Sensing,2011,32(22):6929-6944.
[2] JIANG C,WARD M.Shadow identification[C]//Proc.1992 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Champaign,USA:IEEE Press,1992:606-612.
[3] JOSHI A J,PAPANIKOLOPOULOS N.Learning to detect moving shadows in dynamic environments[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2008,30(11):2055-2063.
[4] CHOI J,YOO Y J,CHOI J Y.Adaptive shadow estimator for removing shadow of moving object[J].Computer Vision and Image Understanding,2010,114(9):1017-1029.
[5]許妙忠,余志惠.高分辨率衛星影像中陰影的自動提取與處理[J].測繪信息與工程,2003,28(1):20-22.
[6]張曉美,何國金.基于ALOS衛星圖像陰影的天津市建筑物高度及分布信息提取[J].光譜學與光譜分析,2011,31(7):2003-2006.
[7]姜柯,李艾華,蘇延召.結合邊緣紋理和抽樣推斷的自適應陰影檢測算法[J].西安交通大學學報,2013,47(2):39-46.
[8]高凱亮,覃團發,陳俊江,等.綜合灰度和紋理特征的運動陰影檢測方法[J].電視技術,2012,36(7):115-117.
[9] HUANG G,QIN Y,SIEW C.Extreme learning machine:theory and applications[J].Neurocomputing,2006,70(1):489-501.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
