有限長迭代學習控制及在掃描光刻中的應用
2014-09-20 06:07:54姜曉明陳興林
電機與控制學報 2014年9期
關鍵詞:系統
姜曉明, 陳興林
(哈爾濱工業大學控制科學與工程系,黑龍江哈爾濱 150001)
0 引言
步進掃描式光刻機[1-2]是半導體制造的主要生產設備。在嚴格工藝下縮短掃描光刻的預掃描時間對提高系統產率尤為重要。受機械諧振的影響,無法顯著提高系統的帶寬,因此也難以改善系統的動態性能。基于掃描曝光過程的重復性,將迭代學習控制用于掃描光刻系統中。
迭代學習控制[3-5]在光刻設備中已有應用,最初其被應用于步進式光刻機,例如文獻[6]采用魯棒綜合的迭代學習控制律來改善硅片臺的步進性能。文獻[7]通過迭代學習控制來消除系統在步進運動后的殘留振動。然而上述方法對掃描式光刻系統來說缺少針對性。HEERTJES M等[8]提出一種非線性迭代學習控制方法,以掃描性能指標為閾值進行切換控制,使之一直趨向閾值,但閾值的選取需要反復的嘗試。文獻[9]不需要設置閾值,直接采用分段方法,旨在消除掃描段的非重復性擾動,但在預掃描段的性能提升有限。此外,文獻[10]通過時頻分析方法來提高系統對非重復掃描軌跡的適用性。MISHRA S等[11]將基于投影方法的迭代學習控制應用于模擬的硅片臺系統。上述方法存在如下缺陷:1)迭代過程存在大量的矩陣運算,而且掃描周期越長,運算量越大;2)在提高系統的性能和改善方法的魯棒性之間難以兼顧;3)在預掃描區間的分段學習控制容易影響系統的動態性能。
針對上述問題,首先給出硅片臺在掃描光刻中的運動模型和掃描軌跡;然后基于名義系統的優化指標提取有效學習系數,得到基于有限長脈沖響應的學習控制律,并對其收斂性和魯棒性進行分析;最后將該方法應用于實驗平臺,采取掃描后期切換的學習控制策略來改善系統的掃描性能。
1 掃描式光刻系統
1.1 硅片臺系統
掃描光刻系統包括硅片臺和掩模臺子系統,在掃描光刻過程中,兩個子系統分別沿不同的軌跡進行運動。以硅片臺的微動臺為例進行說明,微動臺是一個六自由度的氣浮運動平臺,其受力分布如圖1所示,執行機構由3組線圈組成的平面電機以及3個垂向的重力補償器組成。這里考慮系統的平面運動,此時忽略垂向運動對平面運動的影響[1]。將微動臺重心的受力轉化到平面電機上,若O為微動臺的幾何中心,平面電機的三組線圈分別按等邊三角形進行排列,出力分別為Fh1,Fh2,Fh3。重心的受力分別為沿Xc軸步進方向的受力Fxc、沿Yc軸掃描方向的受力Fyc,以及沿旋轉方向的力矩Tzc,令 α為Fh1與Yc軸的夾角,則平面受力關系為

圖1 微動臺受力情況Fig.1 Forces of the micro motion stage
式中:
其中:m為微動臺的質量;Jz為微動臺的轉動慣量;x,y,θ為重心坐標系下的位置和轉角。通過上述運動關系可以得到系統的解耦控制框圖,如圖2所示。
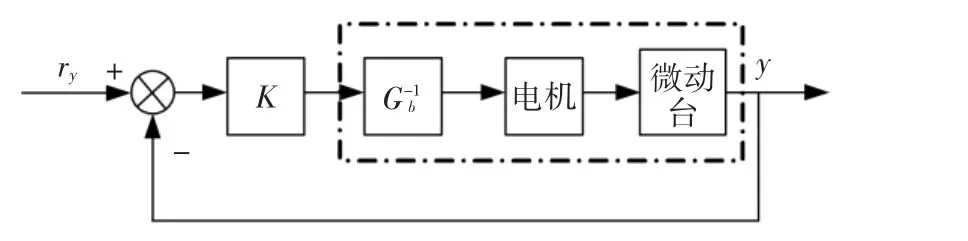
圖2 控制框圖Fig.2 Control diagram
圖中通過對微動臺進行幾何解耦,將其分解到3個單入單出的運動模型上,在此基礎上可以提取微動臺在掃描方向上的運動模型,即從掃描方向位置指令ry到掃描方向位置輸出y的控制回路。限于實驗條件,本文直接采用單自由度實驗平臺來實現掃描方向上的運動。為充分模擬掃描光刻過程,實驗平臺采用無鐵心永磁同步電機來代替平面電機,兩者的力矩擾動水平相當;同時實驗平臺采用氣浮支撐結構。由于平臺采用單執行機構,負載質量(5.5 kg)約為微動臺質量(15 kg)的1/3。上述設計使實驗平臺可以近似模擬系統的掃描光刻過程。
1.2 掃描軌跡
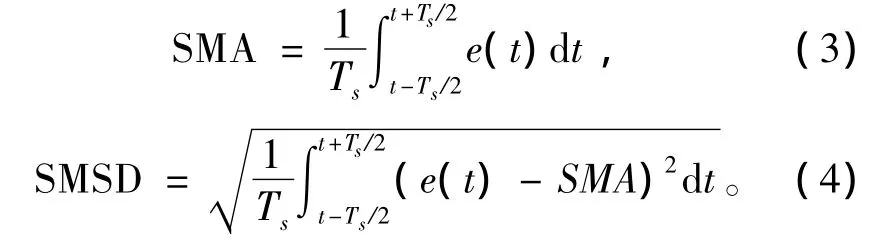
掃描光刻系統的性能指標包括:與掃描誤差相關的移動平均值(SMA)、移動標準差(SMSD)以及調節時間。在t時刻的SMA和SMSD描述為式中:e(t)表示誤差;Ts表示掃描一個狹縫所需的時間。若狹縫的寬度為slit,掃描的速度為v,則Ts為

調節時間與SMA、SMSD相關,是SMA和SMSD滿足指標要求時的預掃描時間。為了改善系統的動態跟蹤性能,緩解加減速過程對系統的沖擊,采用時間優化的方法進行掃描軌跡的規劃,硅片臺的掃描軌跡如圖3所示。圖中0~t1區間表示系統的加速過程;t1~t2區間表示系統的預掃描階段,在該階段,SMA和SMSD指標逐漸收斂至曝光所需的精度要求;t2~t4區間為系統的掃描光刻階段;掃描結束后,硅片臺從t4時刻開始減速,并進行反向加速,接著重復上述過程。圖中t5、t6、t8時刻與t1、t2、t4的定義相同。硅片臺的掃描軌跡為一個往復運動軌跡,這與光刻的工藝和效率有關[1],下面將圍繞著掃描運動來展開。
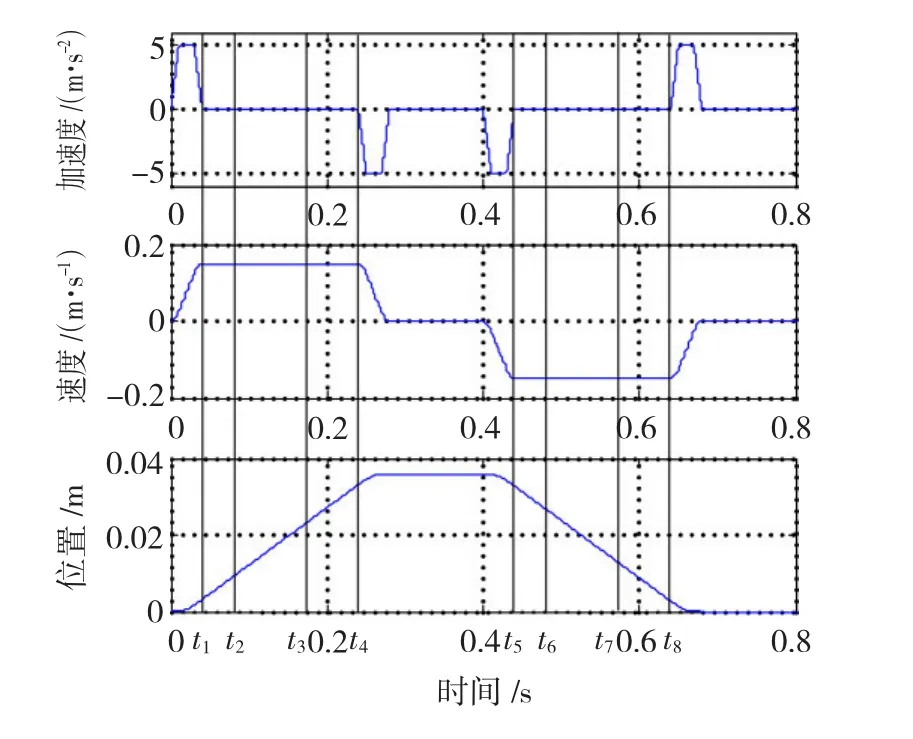
圖3 掃描軌跡Fig.3 Scan trajectory
2 有限長迭代學習控制
2.1 迭代學習控制
根據1.1節的分析,將硅片臺系統進行解耦,得到系統在掃描方向上的運動模型為

式中:A,B,C,D為系統的狀態陣,系統的初始狀態為0;u為系統在掃描方向上的期望控制量;y為系統在掃描方向上的位置輸出。若采樣周期為tn,則在有限時間段0~ntn內,系統的時域表達形式為
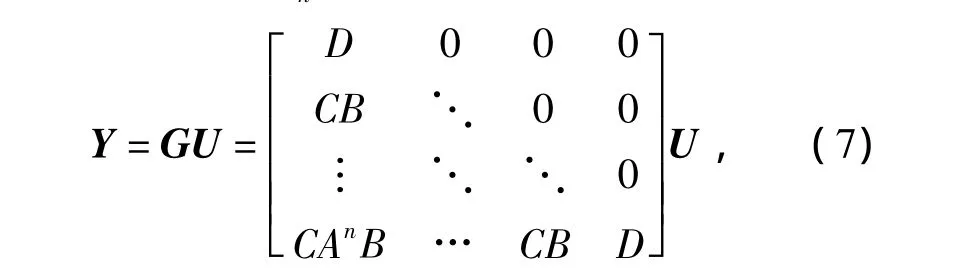
式中:Y=[y(0)y(1)…y(n)]T;U=[u(0)u(1)…u(n)]T。若參考輸入為R,則跟蹤誤差為E=RY,基于二次型名義性能指標的優化問題為

式中:加權矩陣We=α1I;Wd=α2I,Ei為第i步迭代周期的跟蹤誤差;ΔU=Ui+1-Ui,Ui為第i步迭代周期的控制量。利用優化理論=0可以得到優化迭代學習控制律,其表達形式為式中,L為優化學習控制律的時域描述。

上述優化迭代學習控制律[12]被廣泛應用。但在應用時會出現以下問題:1)學習控制律是針對精確模型的,對其魯棒性討論較少;2)學習控制律依賴于運動周期的長短,導致運動周期越長計算量越大,進而采樣時間變長,影響系統的實時性,所以學習控制律(9)更多地被用于實時性和性能要求不高的過程控制領域[13]。針對掃描光刻系統,為克服上述缺陷,提出一種基于有限長脈沖響應的迭代學習控制律,將在下一節展開。
2.2 有限長迭代學習控制
采用圖4所示的閉環迭代學習控制框架,圖中P為被控對象,K為反饋控制器,Lf為待求取的學習控制律,R為給定軌跡,Ei為第i步迭代的誤差,Ui為第i步迭代的控制量,Yi+1為第i+1步迭代的輸出。若采用T來描述由P和K構成的反饋控制系統的時域描述,則閉環迭代學習控制律為式中:T為閉環系統的Markov矩陣描述,T中的元素為系統的閉環系統脈沖響應系數。

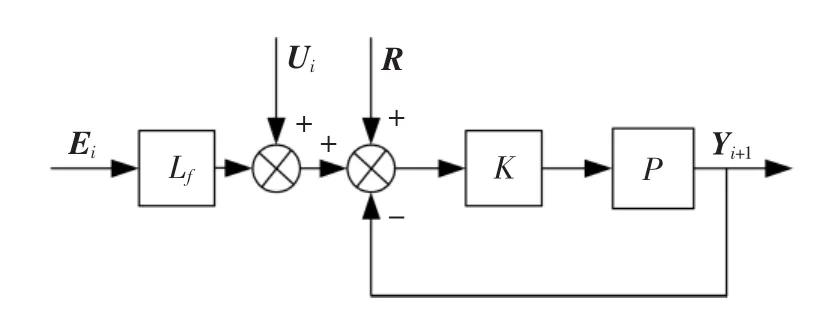
圖4 系統控制框架Fig.4 Control diagram for the system
有限長迭代學習控制是對優化學習控制律(10)的一個有效截短。不妨令學習控制律(10)的矩陣描述為
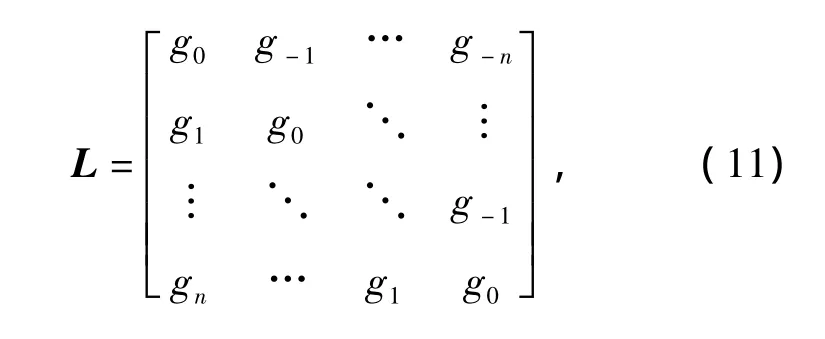
式中:g1…gn為Markov系數;ntn為系統的掃描周期。上述學習律可以通過完整的閉環系統脈沖響應系數來獲得,這一過程直接借助于實驗數據而非精確的系統描述。同時,式(11)描述的是一個高維矩陣,在實施過程計算量較大,影響系統的實時性。現在期望得到一個基于有限長脈沖響應的數字濾波器Lf(z)來取代學習控制律(11)。這里,為充分反映學習控制律的非因果性,采用非因果的數字濾波器來描述,見定義1。
定義1截短的非因果迭代學習控制律描述為

式中,gi來自于學習控制律(11),學習控制律的非因果部分和因果部分的階次都為n1,n1<n。這樣會在很大程度上方便優化迭代學習控制律的實施,提高系統的實時性。有限長迭代學習控制律的收斂性分析如定理1。
定理1對于式(6)描述的系統,采用有限長迭代學習控制律(12),學習控制系統是收斂的。
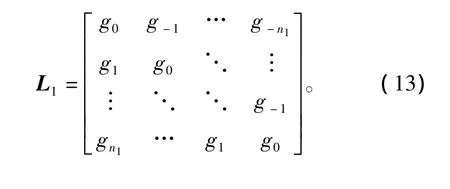
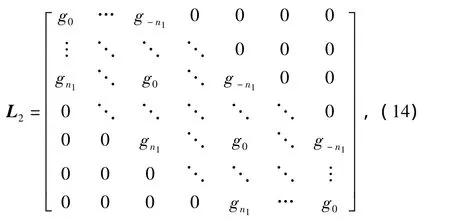
證明:假設系統存在一個n1tn的掃描周期,那么在0~n1tn內描述的迭代學習控制律與式(11)類似,此時學習控制律的維數為n1,描述為而對于掃描周期為n的系統而言,有限長迭代學習控制律(12)的矩陣描述為

其中,λ=‖T‖2,因此,式(11)描述的學習控制律是收斂的。由Toeplitz矩陣的性質可知

式中T1為與L1相匹配的Markov系統矩陣。
因此學習控制律(13)也是收斂的,最終有限長迭代學習控制律是收斂的。證畢
在有限長迭代學習控制律的基礎上,采用文獻[14]提出的分段學習控制思想來進一步提高系統的掃描性能。如圖2所示,在勻速段分別選擇t3和t7兩個時刻,使得t3~t4(或t7~t8)之間的時間段長度等于n1tn,學習控制量分別保持t3和t8時刻的控制量,從而可以得到分段有限長迭代學習控制律。
2.3 有限長迭代學習控制的魯棒性
由于六自由度運動系統的耦合作用以及系統自身機械諧振的影響,系統在掃描方向上存在一定的不確定性,因此有必要考察有限長迭代學習控制系統的魯棒性。若將閉環系統描述為Tr=T+ΔT,ΔT為系統的不確定性,最終得到定理2。
定理2當系統的不確定性滿足‖ΔT‖2<‖T‖2,則有限長學習控制律(12)使系統魯棒收斂。
證明:對于掃描周期為ntn的系統,系統的魯棒
L2的維數為n。
L2在0~n1tn的學習收斂性與itn~(n1+i)tn的收斂性一致。對于線性系統而言,要證明有限長迭代學習控制律的收斂性,只需證明迭代學習控制律(13)的收斂性。
分析完整掃描周期下的迭代學習控制律(11),由Ei=R-Yi可以得到

令We=α1I,Wd=α2I,α1,α2為非零正數,則收斂性條件為‖I-TrL‖2<1。
若令We=α1I,Wd=α2I進一步有
式中λ=‖T‖2。當‖ΔT‖2=0時,系統是收斂的;當‖ΔT‖2≠0時,令‖ΔT‖2<‖T‖2,則‖I-TrL‖2<1,學習控制系統是魯棒收斂的。
由定理1可知,對于有限長迭代學習控制律而言,系統也是魯棒收斂的。證畢
3 實驗驗證
根據第2節的描述,采用精密直線運動平臺來模擬硅片臺的掃描運動,如圖5所示。試驗平臺安放在隔振平臺上,采用氣浮支撐,外接空氣壓縮機和過濾器,在5Bar的氣壓下正常工作。采用無鐵心直線電機作為執行機構,并且采用高分辨率光柵尺作為測量傳感器,控制系統還包括了工業控制計算機、電機驅動單元、運動控制板卡以及海德漢數據采集卡(對光柵尺的正余弦信號進行4096細分),學習控制算法在RTX實時系統下實施。
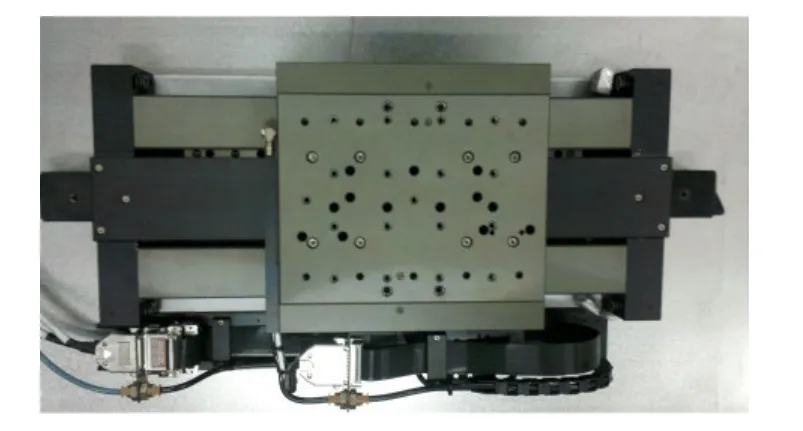
圖5 氣浮試驗平臺Fig.5 Air bearing test bench
3.1 有限長迭代學習控制
結合圖4給出的系統控制框架,將有限長迭代學習控制律應用于上述試驗平臺。為描述方便,將該方法稱為FILC(Finite Iterative Learning Control)。令系統采樣頻率為5 kHz,首先對反饋控制器K進行設計,采用PID控制來測試系統的閉環脈沖響應特性,具體設計參數見文獻[15]。如圖6所示,給出了系統在100 μm脈沖輸入下的31組脈沖響應輸出曲線。利用脈沖響應的均值可以提取名義系統的Markov系數,選擇優化加權系數 α1=1,α2=1,可以計算得到迭代學習控制律(11)的有效學習系數,進一步選擇有限長度n1=300,得到有限長學習控制律(12),階次為601。限于篇幅,這里未給出學習控制律的具體描述。將FILC應用于試驗平臺,得到系統在時域下的跟蹤誤差曲線,如圖7所示。
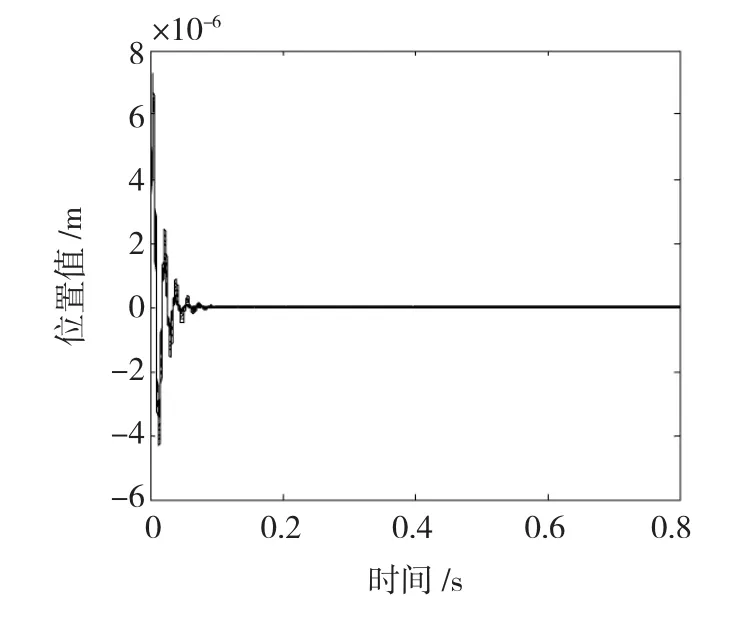
圖6 輸入為100 μm的脈沖響應Fig.6 Impulse response for 100 μm input
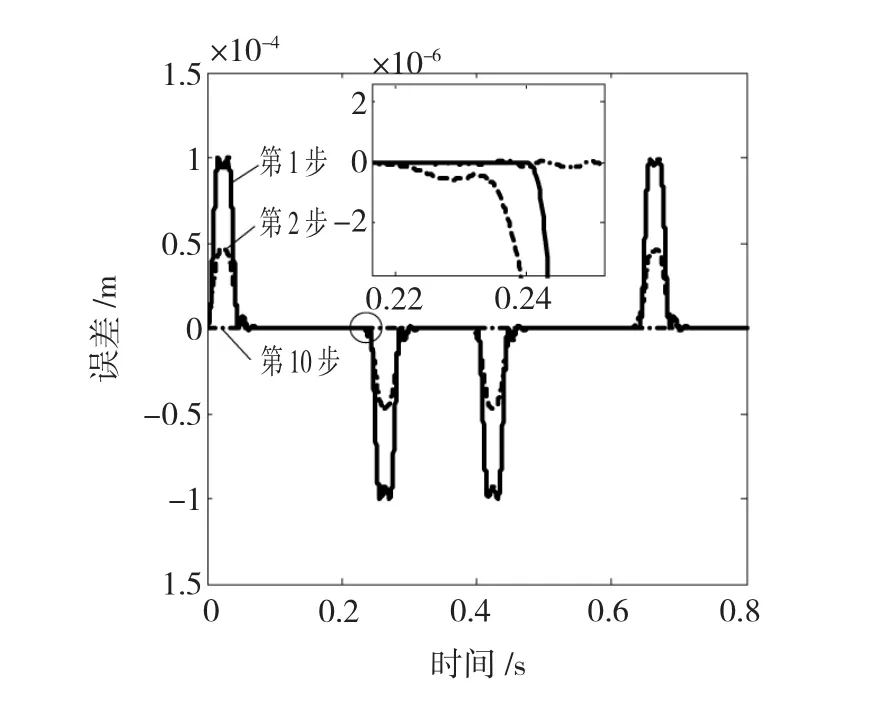
圖7 應用FILC時的跟蹤誤差Fig.7 Tracking errors for FILC
圖中第1步是指系統在單獨反饋控制下的跟蹤誤差,第2步和第10步分別為系統在第2步和第10步迭代時的跟蹤誤差。圖7還給出了系統在掃描結束段的誤差局部放大,從中發現,隨著學習控制律的實施,系統在臨近減速時的性能發生了惡化。圖8給出了系統跟蹤誤差的2范數沿迭代軸的變化特性,隨著迭代周期的增加,跟蹤誤差的2范數逐漸收斂,說明有限長迭代學習控制律是收斂的。
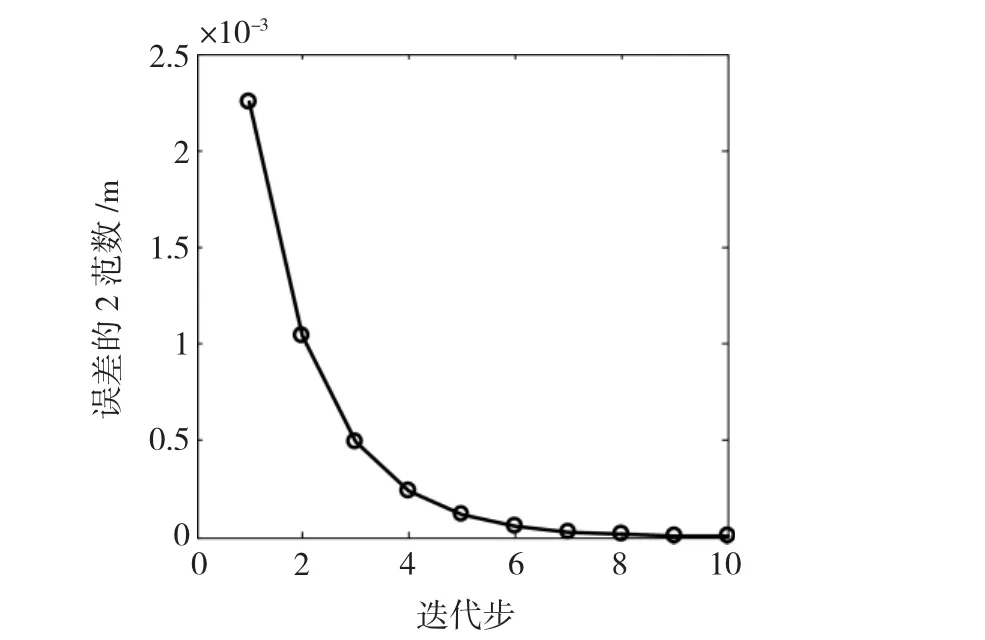
圖8 應用FILC時的誤差2范數Fig.8 2 -norm of errors for FILC
3.2 分段有限長迭代學習控制
針對系統在勻速段后期性能部分惡化的現象,應用分段有限長迭代學習控制,將其稱之為SFILC(Segment Finite Iterative Learning Control)。通過實驗得到系統的跟蹤誤差曲線,如圖9所示。圖中各條曲線的意義與圖7相同,此時,系統在勻速段的性能要優于直接應用FILC時的情形。系統的收斂特性如圖10所示,跟蹤誤差的2范數隨著迭代周期的增加而逐漸收斂。
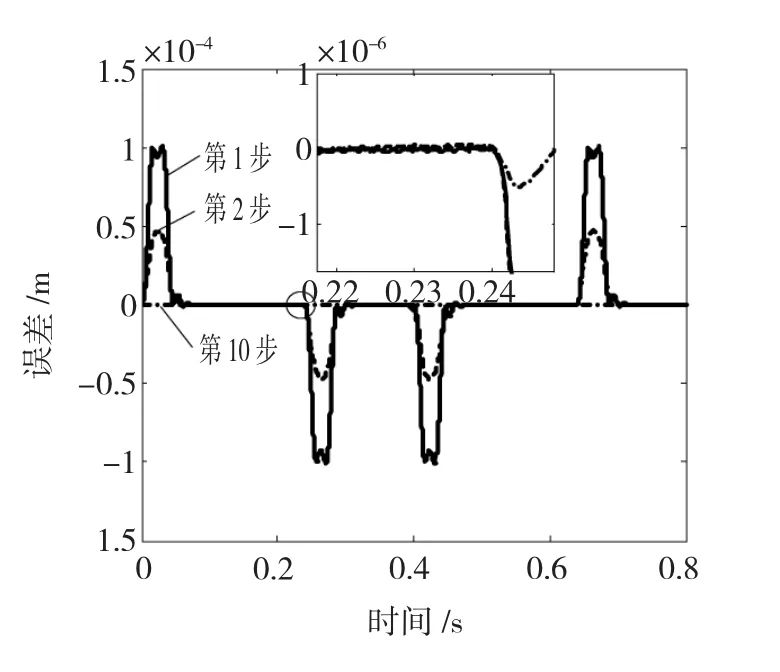
圖9 應用SFILC時的跟蹤誤差Fig.9 Tracking errors for SFILC
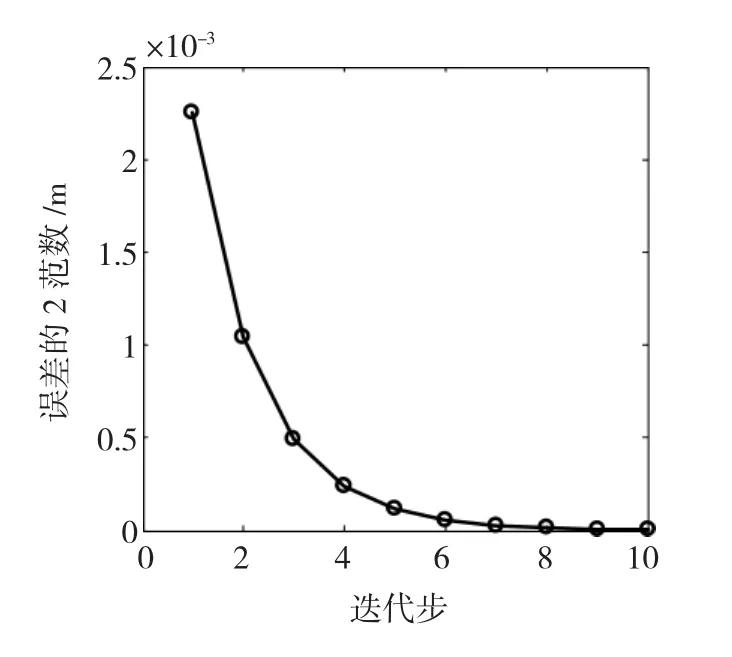
圖10 應用SFILC時誤差的2范數Fig.10 2 -norm of errors for SFILC
進一步考察掃描光刻系統的統計特性,文中以曝光狹縫寬度10.5 mm,掃描速度150 mm/s為例,系統的統計指標如圖11所示。與單獨的反饋控制相比,系統在分段有限長迭代學習控制的作用下,SMA和SMSD得到了顯著的改善。以SMA=20 nm,SMSD=60 nm作為曝光的性能指標,經過10步迭代,系統的預掃描時間從46.8 ms縮短至1.6 ms。
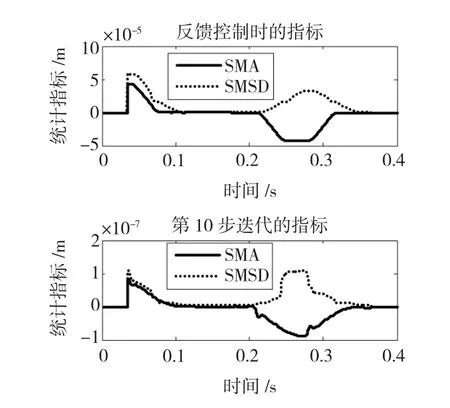
圖11 系統的統計指標Fig.11 Statistical index of the system
3.3 魯棒性驗證
對有限長迭代學習控制系統的魯棒性進行驗證,系統的不確定性可以通過脈沖響應得以體現。如圖12所示,分別給出了脈沖響應的上下界,它反映出系統存在一定的不確定性。利用系統的脈沖響應的平均值得到名義系統的矩陣描述T,同理可以得到系統不確定性的上下界ΔT1和ΔT2。進一步求得名義系統的范數‖T‖2=2.706 9,不確定性的范數‖ΔT1‖2=1.411 5,‖ΔT2‖2=1.401 6,由于‖ΔT1‖2<‖T‖2且‖ΔT2‖2< ‖T‖2,根據第2節的理論,系統是魯棒收斂的。
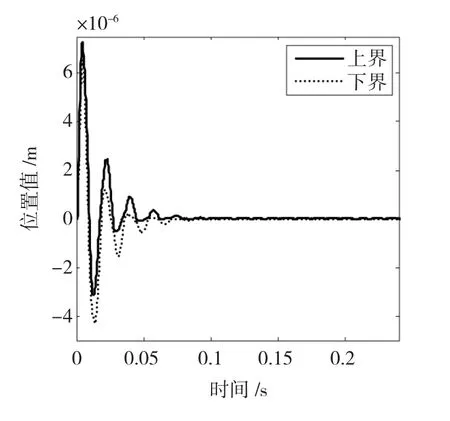
圖12 系統不確定性Fig.12 System uncertainty
4 結語
文中提出了一種基于有限長脈沖響應的迭代學習控制方法。該方法將系統名義指標下的優化迭代學習控制律轉化為基于有限長脈沖響應的學習控制律,提高了系統在應用中的實時性。此外還討論了有限長迭代學習控制律的收斂性和魯棒性。最后將有限長迭代學習控制律應用于掃描光刻實驗平臺,實驗結果表明該方法有效地減小了掃描光刻的預掃描時間。
[1]BUTLER H.Position control in lithographic equipment[J].IEEE Control Systems Magazine,2011,31(5):28-47.
[2]MARTINEZ V M,EDGAR T F.Control of lithography in semiconductor manufacturing[J].IEEE Control System Magazine,2006,26(6):46-55.
[3]ARIMOTO S,KAWAMURA S,MIYAZAKI F.Bettering operation of robots by learning[J].Journal of Robotic Systems,1984,1(2):123-140.
[4]BRISTOW D A,THARAYIL M,ALLEYNE A G.A survey of Iterative learning control[J].IEEE Control Systems Magazine,2006,26(3):96-114.
[5]張宏偉,余發山,卜旭輝,等.基于魯棒迭代學習的永磁直線電機控制[J].電機與控制學報,2012,16(6):81-86.
ZHANG Hongwei,YU Fashan,BU Xuhui,et al.Robust iterative learning control for permanent magnet linear motor[J].Electric Machines and Control,2012,16(6):81-86.
[6]DE ROOVER D,BOSGRA O H.Synthesis of robust multivariable iterative learning controllers with application to a wafer stage motion system[J].International Journal of Control,2000,73(10):968-979.
[7]VAN OOSTEN C L,BOSGRA O H,DIJKSTRA B G.Reducing residual vibrations through iterative learning control,with application to a wafer stage[C]//2004 American Control Conference,June 30-July 2,2004,Boston,USA:IEEE,2004,6:5150-5155.
[8]HEERTJES M,TSO T.Nonlinear iterative learning control with applications to lithographic machinery[J].Control Engineering Practice,2007,15(12):1545-1555.
[9]MISHRA S,COAPLEN J,TOMIZUKA M.Precision positioning of wafer scanners:segmented iterative learning control for nonreprtitive disturbances[J].IEEE Control Systems Magazine,2007,27(4):20-25.
[10]ROTARIU I,STEINBUCH M,ELLENBROEK R.Adaptive iterative learning control for high precision motion systems[J].IEEE Transactions on Control Systems Technology,2008,16(5):1075-1082.
[11]MISHRA S,TOMIZUKA M.Projection-based iterative learning control for wafer scanner systems[J].IEEE/ASME Transactions on Mechatronics,2009,14(3):388-393.
[12]GUNNARSSON S,NORRLOF M.On the design of ILC algorithms using optimization[J].Automatica,2001,37(12):2011-2016.
[13]XU Z,ZHAO J,YANG Y,et al.Robust iterative learning control with quadratic performance index[J].Industrial&Engineering Chemistry Research,2012,51(2):872-881.
[14]陳興林,姜曉明,王巖.掃描光刻系統的分段迭代學習控制策略[J].哈爾濱工業大學學報,2013,45(7):18-23.
CHEN Xinglin,JIANG Xiaoming,WANG Yan.Segmented iterative learning control strategy for wafer scanner systems[J].Journal of Harbin Institute of Technology,2013,45(7):18-23.
[15]陳興林,姜曉明,王程.晶圓掃描光刻系統的有效非因果學習控制[J].控制理論與應用,2013,30(10):1258-1264.
CHEN Xinglin,JIANG Xiaoming,WANG Cheng.Effective noncausal learning control for wafer scanner systems[J].Control Theory&Applications,2013,30(10):1258-1264.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32