T-S模糊系統非脆弱跟蹤控制器設計
2014-09-25 10:20:06程權成常曉恒
電子設計工程 2014年17期
程權成,常曉恒
(渤海大學 工學院,遼寧 錦州 121013)
T-S模糊系統非脆弱跟蹤控制器設計
程權成,常曉恒
(渤海大學 工學院,遼寧 錦州 121013)
針對T-S模糊系統,研究了非脆弱H∞跟蹤控制器的設計問題。目的是通過設計跟蹤控制器使得被控閉環系統滿足給定的H∞跟蹤控制性能指標。本文采用線性矩陣不等式(LMI)方法,求解過程不必通過二次迭代的兩步算法,所設計的控制器在一定的加性參數變化情況下,仍能保證系統的漸進穩定性。最后,通過單關節剛性機械臂系統的仿真實驗表明了該方法的有效性。
T-S模糊系統;非脆弱;H∞跟蹤控制;LMI
跟蹤控制作為控制理論活躍的研究領域之一,被廣泛應用于機器人軌跡跟蹤、飛行器軌跡跟蹤、高精度機械加工等領域。實現系統的穩定和跟蹤是控制理論的兩類典型問題,然而對于非線性系統而言,其跟蹤控制問題比穩定性問題更加復雜。早在1997年,Kung就曾針對離散系統通過反饋線性化方法設計了模糊跟蹤控制器[1],然而得到的模糊控制器并不能保證非最小相位系統的穩定性。Lam研究了連續模糊系統的模型跟蹤控制問題,在假定狀態變量可測的前提下,分析了模糊控制器設計的魯棒性問題[2]。為解決[1]中可能存在的不穩定性和[2]中狀態變量不可測時的局限性,Tseng針對T-S模糊模型提出了對于所有輸入有界參考信號的跟蹤控制性能指標,不必通過反饋線性化和復雜的自適應算法便可達到系統性能要求[3],但其研究的T-S模糊模型中并沒有考慮實際系統中可能存在的不確定性,于是Mansouri在Tseng的研究基礎上用含有不確定性的T-S模糊模型來描述非線性系統[4],增強了系統的魯棒性。在控制方法和控制性能指標上也有很多改進[5-7],這些方法均為跟蹤控制問題提供了更加寬泛的理論分析方法。綜上所述,目前針對復雜模糊系統模型設計的跟蹤控制器,需要通過二次迭代的兩步算法或其他復雜算法進行變換求解,不僅增加了系統的保守性,而且降低了系統的時效性。同時,以上關于跟蹤控制器及觀測器的研究中均未考慮非脆弱控制問題[8]。因此,本文通過設計非脆弱跟蹤控制器使得被控閉環系統滿足給定的H∞跟蹤控制性能指標,所設計的控制器考慮存在一定的加性參數變化,控制器的存在條件以線性矩陣不等式(LMI)的形式表示,避免了二次迭代的兩步算法,可行性更高。
1 問題描述
考慮如下的連續T-S模糊系統:


為指定預定軌跡,考慮參考模型如下:

其中,xr(t)∈Rn為參考狀態變量,r(t)為有界參考輸入變量,Ar為穩定矩陣。
選取模糊非脆弱觀測器和控制器的整體模型為:

如果不考慮初始狀態,采用與跟蹤誤差y(t)-yr(t)相關的H∞跟蹤控制性能指標如下[7]:

其中,Q為正定的加權矩陣,γ為給定的性能衰減指標。
為推導本文的結果,將用到如下引理:
引理 1[9]:對于任意的矩陣 Xi,i=1,2,…,r和矩陣 S>0,可
引理2[10]:如果下述兩個矩陣不等式條件成立


引理 4[12]:對于給定適當維數的實矩陣 W=WT,H,E和△T(t)△(t)≤I,那么對于任意常數 σ>0有:W+H△(t)E+(H△(t)E)T≤W+σ-1HHT+σETE
2 H∞跟蹤控制器設計
本節基于線性矩陣不等式方法,給出了非脆弱 H∞跟蹤控制器及觀測器的存在條件。定理1考慮閉環系統(4),對于給定的 γ>0,如果存在矩陣 X>0,Y>0,P1>0,P2>0,P3>0,,和正常數 σKij,σLij,i,j=1,2…,r使得下述矩陣不等式成立:γii<0,Γii<0,i=1,2,…,r γij+γji<0 Γij+Γji<0 i,j=1,2,…,r,i<j



證明:定義 Lyapunov 函數,V(ψ(t))=ψT(t)Pψ(t),P>0 (6)
代入系統(4),由引理1可知下式成立
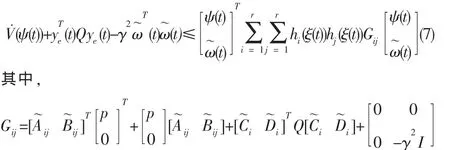



其中,γij,Γij的形式同定理 1。
3 仿真實例
為證明提出方法的有效性,考慮如下的單關節剛性機械臂系統[13]:



選取參考模型如下:
假定跟蹤控制器和觀測器中的不確定參數形如:HK1=-0.1,HK2=0.1,EK1=[-0.1-0.1],EK2=[0.3-0.2],HL1=[-0.3-0.4]T,HL2=[-0.1 0.5]T,EL1=0.1,EL2=-0.6。考慮Q=I時,通過Matlab LMI工具箱求解定理1中的矩陣不等式條件,解得g=7.764時,控制器參數為:K1=[3.134 6-0.871 2], K2=[-3.268 2-0.834 9],L1=[-29.573 8 10.027 3]T,L2=[-23.348 7 8.070 4]T。當觀測器和控制器的內部擾動為△Ki(t)=△Li(t)=cos(t),系統的測量噪聲為v(t)=[exp(-0.1*t)0]T,得到圖1的仿真結果。

圖1 輸出變量y(t)與參考信號輸出變量yr(t)響應曲線Fig.1 The responses of output variable y(t)and reference output variable yr(t)
4 結論
文中針對T-S模糊系統,研究了H∞跟蹤控制器的設計問題,所設計的控制器考慮了加性參數變化的存在。本文的結果以線性矩陣不等式(LMI)的形式給出,求解過程不需要二次迭代,通過該方法求得的跟蹤控制器能夠滿足給定的性能指標。最后,利用對單關節剛性機械臂系統的仿真實驗證明了提出方法的有效性。
[1]Kung C C,Li H H.Tracking control of nonlinear systems by fuzzy model-based controller[C]//Proceedings of the 6th IEEE International Conference on Fuzzy Systems,Barcelona:[s.n.].1997:623-628.
[2]Lam H K,Leung F H F,Tam P K S.Fuzzy control of a class of multivariable nonlinear systems subject to parameter uncertainties:model reference approach[J].International Journal of Approximate Reasoning,2001,26(2):129-144.
[3]Tseng C S,Chen B S,Uang H J.Fuzzy tracking control design for nonlinear dynamic systems via T–S fuzzy model[J].IEEE Transactions on Fuzzy Systems,2001,9(3):381-392.
[4]Mansouri B,Manamanni N,Guelton K,et al.Output feedback LMI tracking control conditions withcriterion for uncertain and disturbed T–S models[J].Information Sciences,2009,179(4):446-457.
[5]Lin T C,Wang C H,Liu H L.Observer-based indirect adaptive fuzzy-neural tracking control for nonlinear SISO systems using VSS andapproaches [J].Fuzzy Sets and Systems,2004,143(2):211-232.
[6]Guo X G,Yang H.output tracking control for delta operator systems with insensitivity to controller coefficient variations[J].International Journal of Systems Science,2011,44(4):652-662.
[7]Lin C,WangQ G,LeeT H.outputtrackingcontrolfor nonlinear systems via T–S fuzzy model approach[J].IEEE Transactions on Systems,Man,and Cybernetics—Part B:Cybernetics,2006,36(2):450-457.
[8]Keel L H,Bhattacharyya S P.Robust,fragile,or optimal[J].IEEE Transactions on Automatic Control,1997,42(8):1098-1105.
[9]Chen C,Feng G,Guan X.Delay-dependent stability analysis and controller synthesis for discrete-time T-S fuzzy systems with time delays[J].IEEE Transactions on Fuzzy Systems,2005,13(5):630-643.
[10]Tseng C S,Hwang C K.Fuzzy observer-based fuzzy control design for nonlinear systems with persistent bounded disturbances[J].Fuzzy Sets and Systems,2007,158(2):164–179.
[11]Boyd S,Ghaoui L E,Feron E,et al.Linear Matrix Inequalities in System and Control Theory[M].Philadelphia:Society for Industrial and Applied Mathematics,1994.
[12]Petersen I R.A stabilization algorithm for a class of uncertain linear system[J].Systems and Control Letters,1987,8(4):351-357.
[13]Pan Y J,Marquez H J,Chen T.Sampled-data iterative learning control for a class of nonlinear networked control systems[C]//Proceedings of the American Control Conference 2006,Minneapolis MN:[s.n.],2006:3494-3499.
Design of non-fragile tracking controller for T-S fuzzy system
CHENG Quan-cheng,CHANG Xiao-heng
(College of Engineering,Bohai University,Jinzhou 121013,China)
According to the T-S fuzzy systems,a non-fragile H∞tracking controller is designed in this thesis.The closed-loop control system can meet H∞tracking performance via the tracking controller that to be designed.The sufficient conditions of controller are obtained via linear matrix inequality (LMI)method.The process of solve without use a two-step iterative algorithm.The designed tracking controller can still ensure the systems are asymptotic stability with some controller parameter perturbations.Finally,the simulation experiment of single-link rigid robot shows the validity of the proposed method.
T-S fuzzy systems;non-fragile;H∞tracking control;LMI
TN964
A
1674-6236(2014)17-001-04
2013-11-12 稿件編號:201311116
國家自然科學基金(61104071);遼寧省高等學校杰出青年學者成長計劃(LJQ2012095);遼寧省裝備制造綜合自動化重點實驗室開放項目(1120211415)
程權成(1989—),男,遼寧遼陽人,碩士研究生。研究方向:模糊控制、非脆弱控制、跟蹤控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
