盾構推進液壓系統控制模式的分析比較
2014-10-10 07:07:56賈連輝
隧道建設(中英文) 2014年9期
關鍵詞:系統
賈連輝
(中鐵工程裝備集團有限公司,河南 鄭州 450016)
0 引言
推進液壓系統是盾構的重要組成部分,承擔著整個盾構的向前推進、姿態調整等復雜的任務。因此,推進液壓系統性能的好壞直接影響盾構的整體性能[1-2]。
在工程應用中,由于地質情況的復雜性和施工現場中許多不可預見因素的影響[3],使得盾構推進液壓系統的控制變得非常復雜。推進速度過快或者不合適、推進壓力與土質情況以及水土壓力不匹配都會引發地表沉降或隆起超過預期設計,造成周圍建筑物開裂甚至倒塌以及鄰近的管道線路斷裂破損等環境地質災害[4]。因此,需要對推進系統的速度、壓力同時進行無級調節,從而實現對盾構轉向、姿態調整的精確控制。學者們對盾構推進系統進行了深入研究[5-6]。文獻[7]分析了復雜地質條件下掘進時冗余驅動推進系統不同分組策略下載荷的傳遞特性,提出基于地質條件的推進系統分組策略。文獻[8]針對盾構施工地質條件復雜、易出現突變載荷而造成掘進裝備失效的問題,提出盾構推進系統順義性的概念并定義其評價指標,以調速閥模式為例建立盾構推進系統解析模型。文獻[9]在分析推進液壓系統復合控制的工作原理基礎上,設計了基于BP神經網絡的的盾構推進速度自適應PID控制器,并對常規PID推進速度控制和基于BP神經網絡的自適應PID推進速度控制進行了階躍響應仿真對比。文獻[10]基于液壓力控制系統分類和原理,介紹了利用電液比例泵配合其他控制元件實現盾構推進系統控制的設計方案的可行性。從以上研究成果來看,對推進系統的研究以推進分組策略和推進控制算法居多,而從液壓控制原理角度來分析比較推進系統不同控制模式的還比較少。目前,推進液壓系統主要有2種方案,一是采用比例溢流閥與比例調速閥相結合的壓力流量復合控制,二是采用比例減壓閥與電液比例泵相配合的方式達到壓力流量同步精確控制的目的。本文結合不同控制模式進行理論分析,并在基于AMESIM所建仿真模型上仿真比較2種控制模式下的壓力和速度響應特性以及在負載擾動下的流量響應特性,通過對工程實際應用的對比測試,驗證理論分析和仿真比較的正確性。
1 推進系統結構
推進系統具有大功率、變負載和工作條件惡劣等特點,一般采用液壓控制系統,由推進液壓缸、液壓泵、比例控制閥以及其他液壓輔件組成。系統執行機構推進液壓缸安裝于盾構密封艙隔板后部,沿盾體周向均勻分布,作用在管片上,通過液壓控制閥控制其伸出速度和壓力[11]。一般推進系統的液壓缸數目較多,考慮到每個液壓缸單獨控制的復雜性和高昂的成本,一般會將推進液壓缸分區控制,即將液壓缸分成上下左右4組,每組單獨設置控制機構。這樣既達到了盾構調整姿態、糾偏的目的,又可以節省成本、降低控制難度。每組推進油缸中均有1根安裝有內置式位移傳感器,位移信號通過PLC顯示在上位機上;裝有位移傳感器的推進缸控制閥組上還裝有壓力傳感器。通過調整每組油缸的不同推進壓力來進行盾構糾偏和調向。
推進系統有2種工況模式:推進模式和管片拼裝模式。推進模式時,系統壓力設定在較高值,推進油缸伸出;管片拼裝模式時,系統壓力設定在較低值,部分推進油缸縮回,管片拼裝好后,油缸再伸出頂住管片。
2 2種控制原理說明
2.1 壓力流量復合控制方案
壓力流量復合控制方案源于最初的推進液壓系統。該方案采用了比例控制技術,并配合以遠控恒壓變量泵和比例調速閥構成容積節流調速系統。遠控恒壓變量泵和壓力流量復合控制方案液壓原理圖分別如圖1和圖2所示。

圖1 遠控恒壓變量泵Fig.1 Remote-controlled constant pressure variable pump
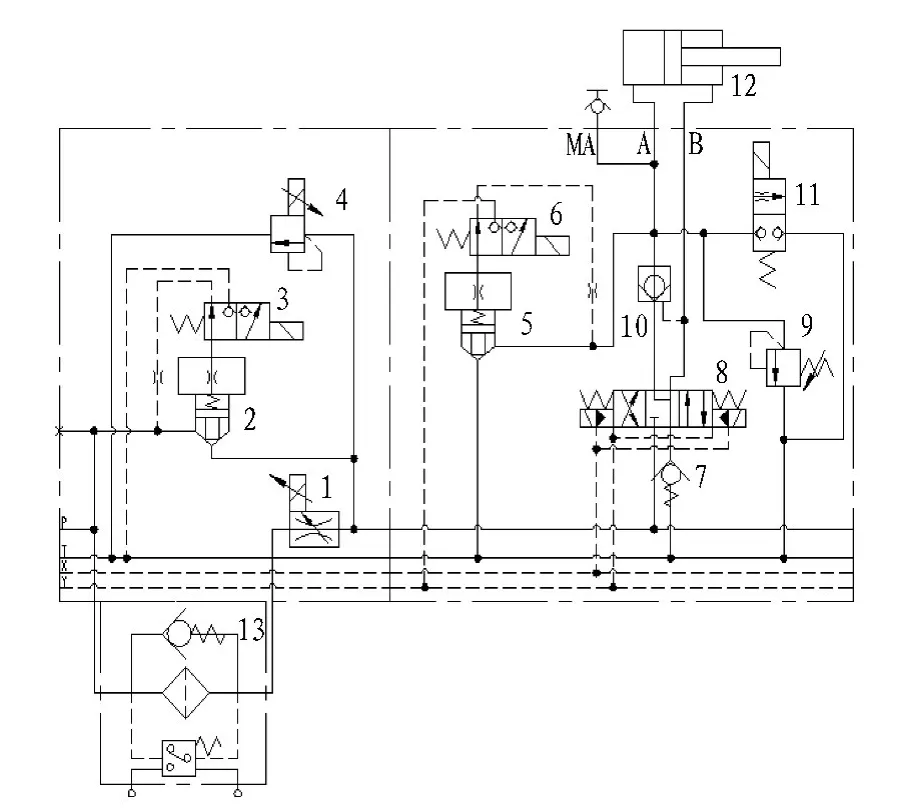
圖2 壓力流量復合控制方案液壓原理圖[12]Fig.2 Hydraulic schematic diagram of pressure-flow compound control mode
系統由遠控恒壓變量泵提供壓力油,推進模式下,4個分區中的推進液壓缸壓力pA,pB,pC和pD通過壓力傳感器進入一個比較環節,其最大值為驅動負載所需的最高壓力pmax。變量泵輸出壓力p=pmax+Δp。其中Δ p為保證比例調速閥穩定工作的最小壓差。壓力油經比例調速閥1、電液換向閥8、液控單向閥10進入推進油缸無桿腔,活塞桿伸出;管片拼裝模式下,系統設定遠控恒壓泵的最大輸出壓力為固定值,此時電磁閥3,6得電,壓力油經插裝閥2、電液換向閥8進入有桿腔,回油直接通過插裝閥5回油箱,使推進缸快速回退,提高拼裝效率。變量泵輸出壓力跟隨負載變化,電控負載敏感控制實現了壓力自適應,減少了系統壓力損失,降低了能耗。
系統通過比例溢流閥和比例調速閥分別對系統壓力、流量進行調節。通過安裝在液壓缸上的壓力、位移傳感器檢測信號并反饋至比較器,形成壓力、速度閉環控制,其控制原理框圖如圖3所示。

圖3 壓力流量復合控制原理框圖Fig.3 Block diagram of principle of pressure-flow compound control mode
該方案采用比例溢流閥對工作壓力進行調節,采用比例調速閥進行速度調節。比例調速閥的輸入信號決定液壓缸的最大推進速度,負載阻力的大小是決定推進速度的另一個因素。對其中某一個分區來說有流量關系:qv=qv1+qv2,其中qv,qv1和qv2分別為比例調速閥的流量調定值、進入推進缸的流量以及通過比例溢流閥的溢流量,比例溢流閥的溢流量受推進壓力的影響,而推進壓力又與總推進力有關,因此在最大推進速度確定的前提下,推進液壓缸的推進速度還與總推進力的大小有關。盾構推進采用分區控制,每區都要設置比例溢流閥和比例調速閥,結構較為復雜,被控元件數量較多。并且由于采用溢流調壓和節流調速,該方案存在一定的溢流損失和節流損失。
2.2 比例減壓閥方案
該方案采用比例減壓閥對推進液壓缸壓力進行調節,配合以電液比例變量泵對流量進行調節。圖4為比例減壓閥方案的液壓原理圖,由于只需對推進工況進行壓力精確控制,故比例減壓閥位于推進液壓缸無桿腔的進油路上。二通插裝閥用于單獨控制本組油缸快速動作,當兩位三通電磁閥得電時,插裝閥打開,本組液壓缸快速伸出或縮回;反之則不得電。
系統的流量即液壓缸的速度通過電液比例泵進行調節。本文以力士樂A11VOEP2泵為例,分析比例減壓閥方案。圖5為電液比例泵原理圖,該泵具有壓力切斷功能,通過外控口可以設置壓力切斷值的大小。根據盾構推進系統的推進模式和拼裝模式分別設置2級切斷值。在系統的壓力未達到設定的壓力切斷值時,通過改變控制電流的大小改變電磁閥芯的位移,從而改變泵的排量;當系統壓力超過設定值時,壓力切斷閥工作,泵排量回擺至最小。泵的排量與輸入的控制電流成正比例關系。泵的排量采用機-液閉環控制,使得泵的排量與控制電流具有很好的線性相關性,降低了系統對速度控制的難度。該方案同樣在液壓缸上安裝壓力、位移傳感器,從而實現各參數的閉環控制[12]。
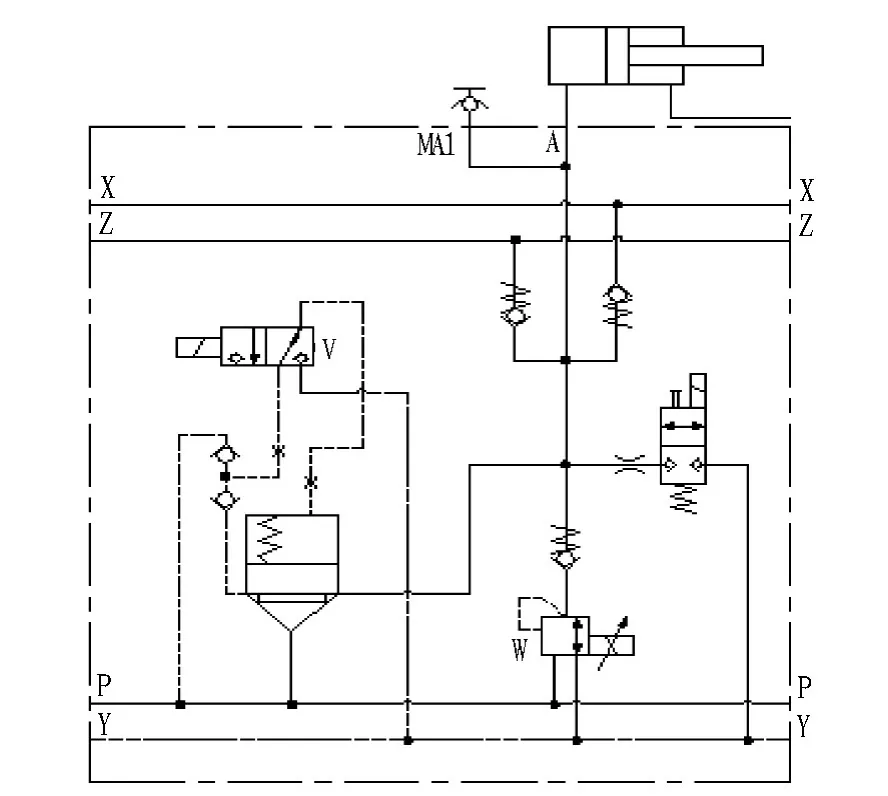
圖4 比例減壓閥控制方案液壓原理Fig.4 Hydraulic schematic diagram of proportional pressure reducing valve control mode

圖5 電液比例變量泵Fig.5 Electro-hydraulic proportional variable pump
比例減壓閥控制每組推進壓力,通過其流量是自適應的,為提高控制性能,采用三通型比例減壓閥。三通比例減壓閥包括主閥和先導控制單元2個部分[13],三通比例減壓閥結構如圖6所示。三通比例減壓閥有3個油口,從功能上看,P與A相通時減壓,A與T相通時溢流,能夠保證負載流量較小甚至為負時的壓力控制性能。

圖6 三通比例減壓閥結構Fig.6 Structure of three-way proportional pressure reducing valve
上述系統中,需在每個分區的進油路上設置1個比例減壓閥,用以對該組液壓缸推進壓力進行精確調節,比例減壓閥在實現壓力穩定的前提下不能穩定通過的流量。通過比例減壓閥的流量在先導閥最小穩定流量與主閥的額定通流量之間變化,整個推進系統的流量供給由電液比例泵調節,因此在保證液壓缸輸入壓力的條件下,液壓缸推進速度是由施加在刀盤上的各組力共同決定的。相比壓力流量復合控制方案,該系統結構相對簡單,控制元件較少,成本相對也較低。電液比例泵上帶有排量反饋,形成流量閉環控制,輸出的流量與負載所需的流量相適應,故除了在減壓閥上的節流損失,該系統沒有溢流損失,這對于功率大范圍變化的盾構推進系統,節能效果是顯著的。由于采取的是單泵對多個執行機構的容積調速,系統并不能對每組液壓缸進行單獨調速,并且需要提供一個恒轉速的動力源或是將原動機、液壓傳動系統、推進液壓缸做整體的匹配控制,這樣增加了控制的復雜性。
3 仿真分析
以直徑6.25 m盾構推進系統為例,在AMEsim中分別搭建2種方案的仿真模型如圖7和圖8所示。所建模型為推進模式并忽略了管道液容等影響較小的因素。針對2種方案推進系統的壓力速度控制特性進行仿真分析。圖9為推進壓力控制仿真結果,圖10為推進速度控制仿真結果。
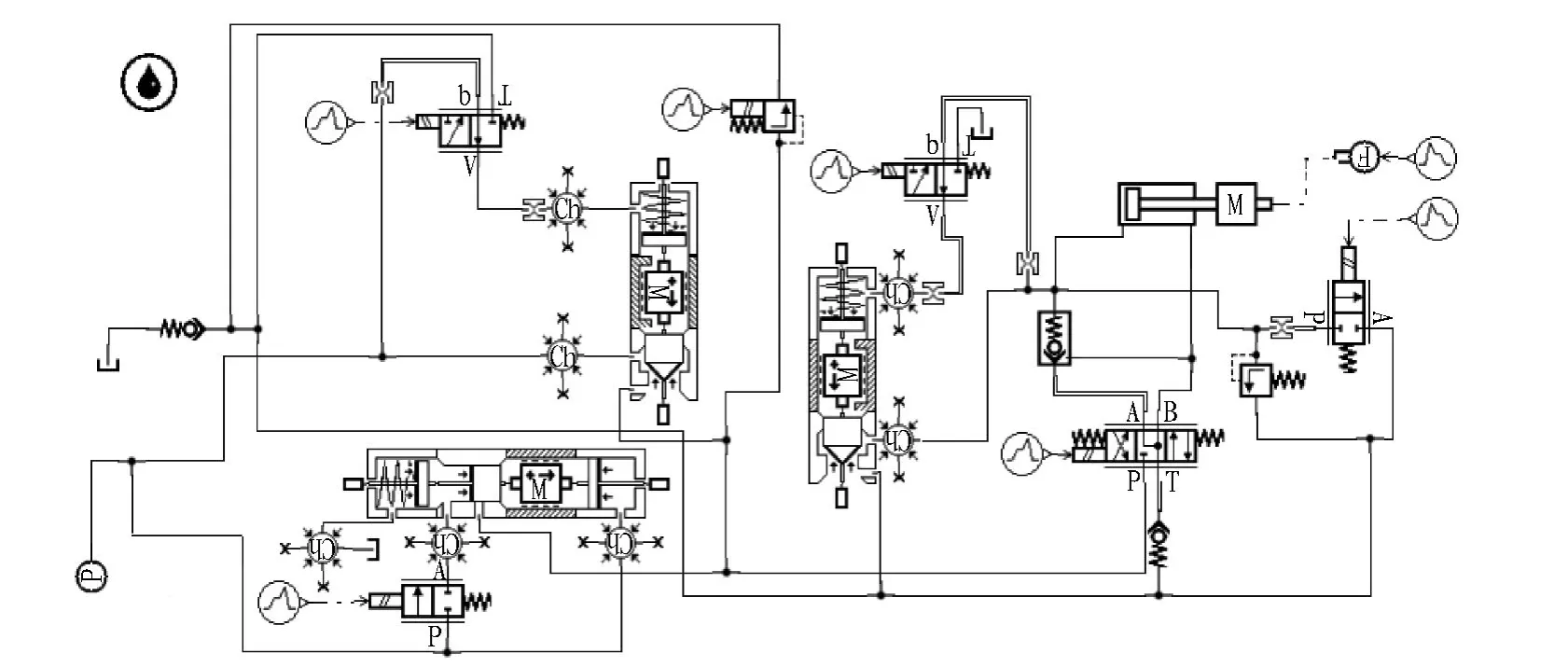
圖7 壓力流量復合控制仿真模型Fig.7 Simulation model of“proportional speed regulating valve+proportional relief valve”control mode
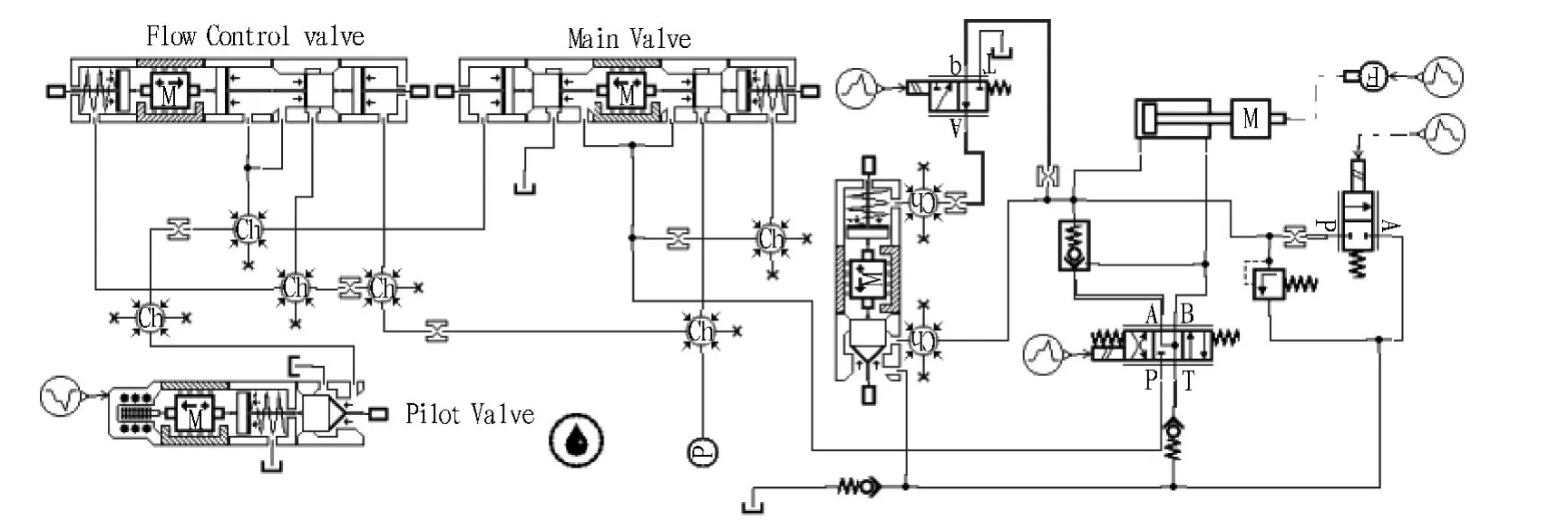
圖8 三通比例減壓閥控制仿真模型Fig.8 Simulation model of three-way proportional pressure reducing valve control mode
仿真時,系統工作壓力在第6 s時由7 MPa階躍至10 MPa,由圖9可以看到2種方式的壓力階躍響應沒有明顯的差別,都在經過一段振蕩之后回到穩態,從圖10可以看到,在壓力突變的瞬間,推進速度都受到了擾動,相比而言采用比例調速閥方式的擾動幅度較小;系統速度在第11 s時由40 mm/min調整至70 mm/min,由圖10可以看到,2種方式的速度都在一段振蕩之后回到穩定狀態,相比而言比例調速閥方式的調整時間較短,響應速度較快,從圖9可以看到,在速度突變的瞬間,推進壓力都受到了擾動,相對而言,比例減壓閥方式的擾動幅度更大。
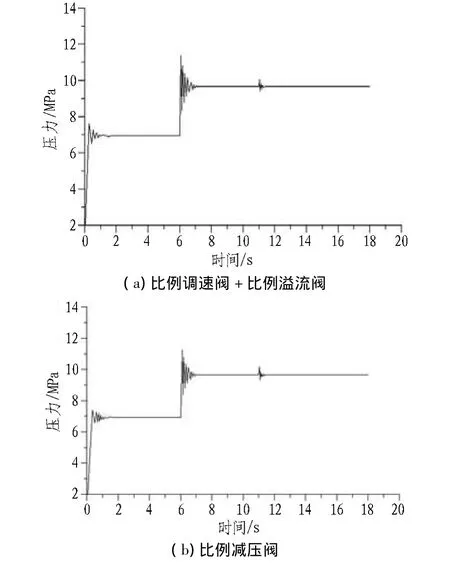
圖9 壓力-時間曲線Fig.9 Pressure-time curve
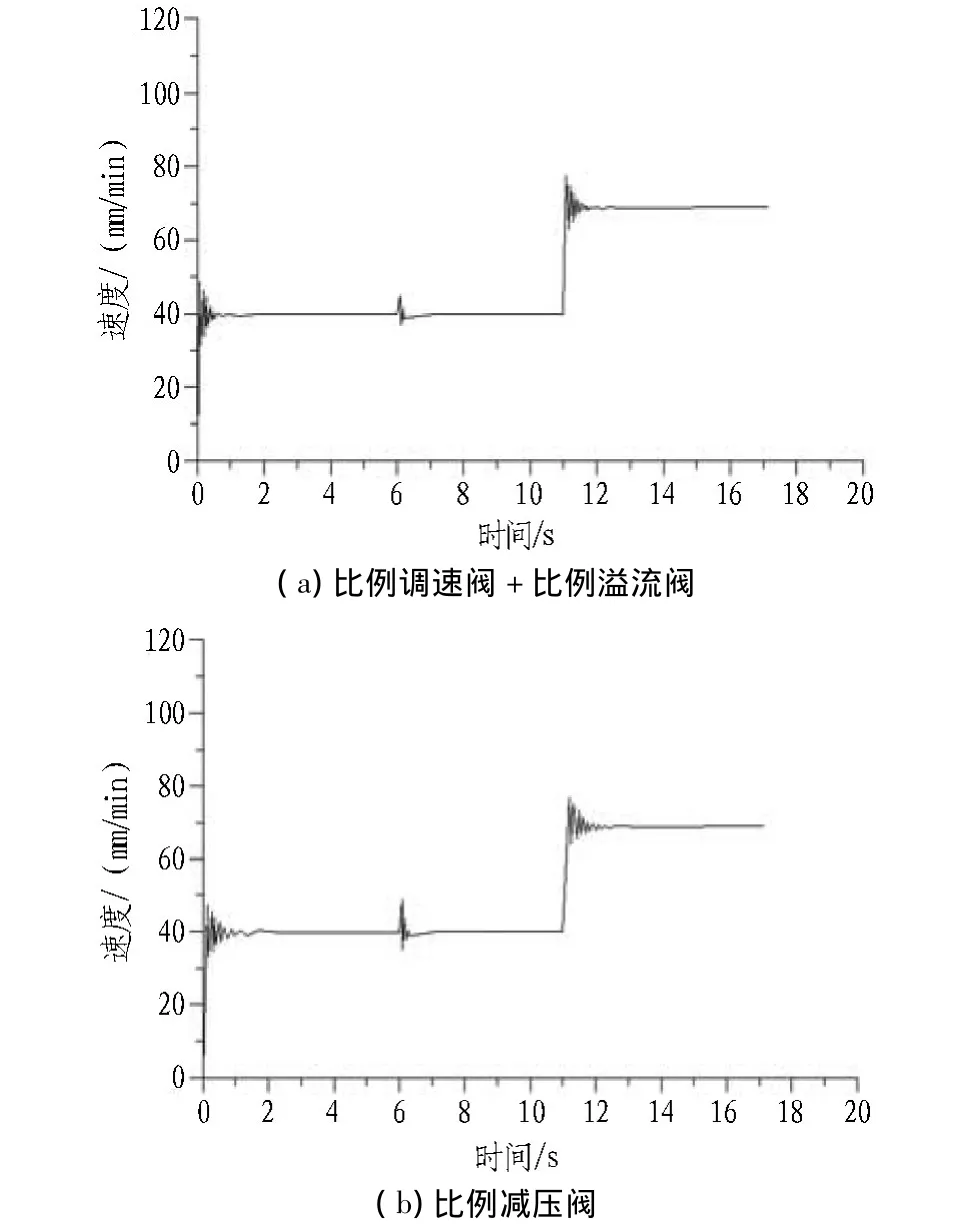
圖10 速度-時間曲線Fig.10 Speed-time curve
在負載擾動下仿真分析通過比例調速閥和比例減壓閥的流量響應,分別得到其流量特性曲線如圖11中的曲線1和曲線2所示,由流量響應曲線可知,在突變負載作用下,通過比例調速閥的流量能夠基本保持穩定,系統響應時間短,超調量小。對于采用比例減壓閥的方案,由于某一組的負載擾動會導致由比例泵輸出流量在所有分組的分配改變,因此通過該組比例減壓閥的流量在負載擾動下會有明顯的振蕩,流量的瞬變也會對其輸出壓力的穩定性產生不利影響。

圖11 負載擾動下的流量特性曲線Fig.11 Curve of flow characteristics under load disturbance
從以上2種方式仿真對比結果可以看出,2種方式都能對壓力和速度2個參數同時進行精確的調節和控制,達到盾構推進系統的要求;比例調速閥+比例溢流閥方式的壓力和速度2個參數的控制相對較容易,響應速度相對較快,兩者的相互擾動耦合較小。
4 工程實際應用情況對比
結合上述2種推進方式的動態仿真,對盾構實際掘進情況下,比例減壓閥控制模式盾構和比例壓力流量復合控制模式進行實際掘進速度和壓力進行了數據檢測及數據采集。對用于北京地鐵的2臺盾構進行了相關測試,1臺為國外某品牌盾構,推進系統采用比例減壓控制模式對推進壓力控制,泵采用電比例排量控制;另外1臺盾構為中鐵裝備盾構,采用比例調速閥+比例溢流閥復合控制模式。掘進地層均為粉質黏土、粉細砂地層,覆土厚度相當,對C組壓力和位移變化進行采集分析,采集數據曲線如圖12—15所示。
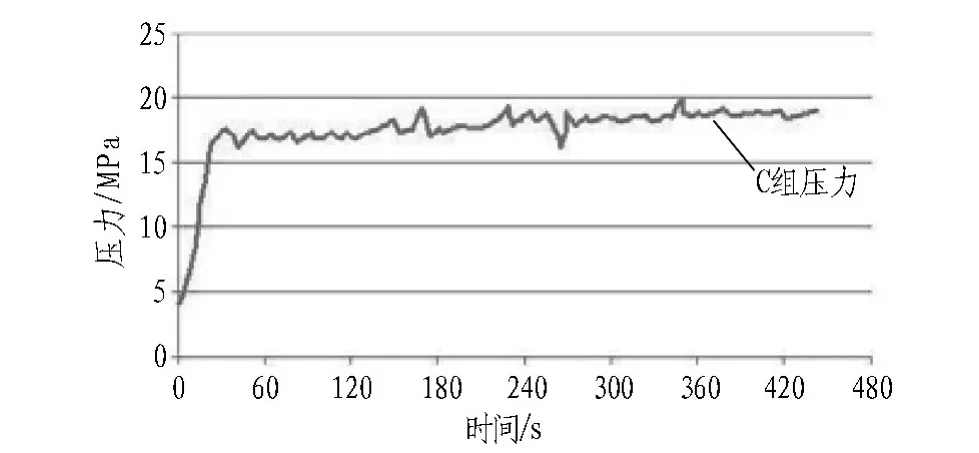
圖12 國外某盾構C組壓力監測曲線Fig.12 Curve of pressure of C group of a foreign brand shield
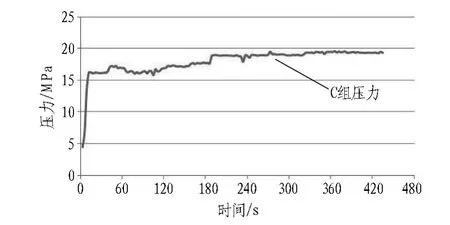
圖13 中鐵裝備盾構C組壓力監測曲線Fig.13 Curve of pressure of C group of CREG shield
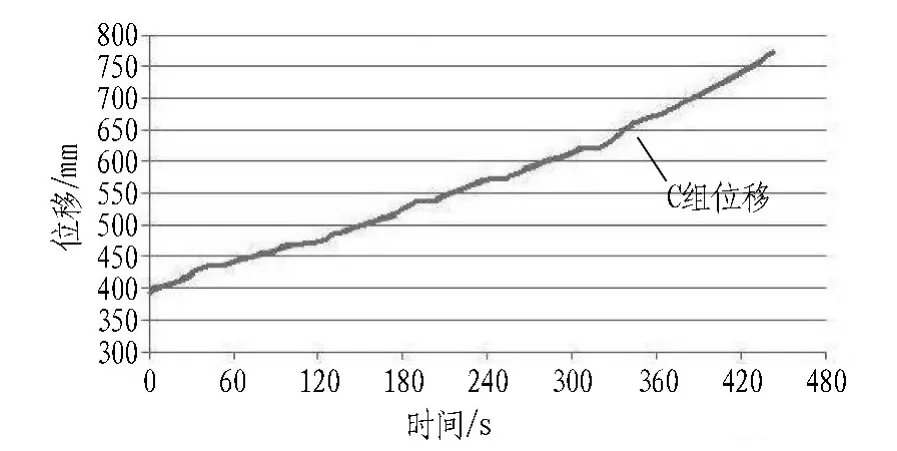
圖14 國外某盾構C組位移監測曲線Fig.14 Curve of displacement of C group of a foreign brand shield
圖15 中鐵裝備盾構C組位移監測曲線Fig.15 Curve of displacement of C group of CREG shield
從圖12—15不難看出,采用比例減壓控制模式盾構在掘進過程中,推進油缸的壓力及位移變化波動較大,壓力調整響應速度不及比例壓力流量復合控制模式,這種油缸壓力和位移變化的頻繁波動會對盾構姿態控制和土倉壓力控制產生一定影響,進而對沉降控制不利。
5 結論與體會
2種盾構推進液壓系統控制模式的控制機制相同,它們都屬于力控制系統,根據比例壓力閥的靜態特性來滿足推進要求。采用壓力流量復合控制方法,結構相對復雜,但整體控制性能好,并且由于各組有獨立調速閥進行速度粗調,組間壓力和流量的耦合作用小,有利于推進壓力和速度的控制。這種控制模式盡管同時存在節流損失和溢流損失,但電控負載敏感技術的應用使其節能效果得到很大提高,目前中鐵裝備、海瑞克盾構采用這種控制模式。比例減壓閥方案控制元件較少,結構相對簡單,節能效果良好,但由于比例減壓閥只能控制各組推進壓力,推進系統在4個分組的實時流量分配受多種因素的影響,組間壓力和流量耦合作用明顯,導致系統對盾構姿態控制比較敏感,表現在工程應用中就是推進壓力和速度波動較大,尤其在軟弱不均地層,這種控制模式顯然對司機操作水平要求更高。因此,在選擇設計方案時應綜合考慮各方面的因素,目前法國的NFM、日本的三菱和小松等生產的盾構多采用比例減壓閥方案,在實際的國內施工中,在軟弱地層,極易出現姿態控制的驟變,造成“栽頭”或糾偏過度的現象。綜合以上分析及目前國內盾構操作水平及習慣,采用壓力流量復合控制方案將更適應國內的用戶。
[1]吳根茂,邱敏秀,王慶豐,等.新編實用電液比例技術[M].杭州:浙江大學出版社,2006.(WU Genmao,QIU Minxiu,WANG Qingfeng,et al.Electrohydraulic proportional technique in theory and application[M].Hangzhou:Press of Zhejiang University,2006.(in Chinese))
[2]楊華勇,龔國芳.盾構掘進機及其液壓技術的應用[J].液壓氣動與密封,2004(1):27-29.(YANG Huayong,GONG Guofang.Shield TBM and its applications of hydraulic technology[J].Hydraulics Pneumatics & Seals,2004(1):27 -29.(in Chinese))
[3] 施仲衡.盾構機在中國地鐵建設中的應用[J].建筑機械,2002(5):20.(SHI Zhongheng.Application of shield machine in underground railway construction of China [J].Construction Machinery,2002(5):20.(in Chinese))
[4] 王夢恕,譚忠盛.中國隧道及地下工程修建技術[J].中國工程科學,2010,12(12):4 -10.(WANG Mengshu,TAN Zhongsheng.The construct technology of tunnel and underground engineering in China[J].Engineering Science,2010,12(12):4 -10.(in Chinese))
[5]胡國良,龔國芳,楊華勇,等.盾構掘進機推進液壓系統壓力流量復合控制分析[J].煤炭學報,2006(2):125-128.(HU Guoliang,GONG Guofang,YANG Huayong,et al.Pressure and flow compound control analysis of thrust hydraulic system for shield tunneling machine[J].Journal of China Coal Society,2006(2):125 -128.(in Chinese))
[6]張慶賀,朱忠隆,楊俊龍,等.盾構推進引起土體擾動理論分析及實驗研究[J].巖石力學與工程學報,1999(6):699 - 703.(ZHANG Qinghe,ZHU Zhonglong,YANG Junlong,et al.Theory analysis and testing study of soil disturbance caused by shield-driven[J].Chinese Journal of Rock Mechanics and Engineering,1999(6):699 -703.(in Chinese))
[7]邵鑫,余海東,張凱之,等.復合巖土掘進時盾構機冗余驅動推進系統的分組策略[J].機械設計與研究,2011,27(1):27 - 28.(SHAO Xin,YU Haidong,ZHANG Kaizhi,et al.Grouping strategy research on shiled machine thrust system excavating in compound geology[J].Mechanic Design and Research,2011,27(1):27 -28.(in Chinese))
[8]侯典清,龔國芳,施虎,等.基于順應特性的新型盾構推進系統設計[J].浙江大學學報:工學版,2013,47(7):49 -53.(HOU Dianqing,GONG Guofang,SHI Hu,et al.Design of new propulsion system of shield tunneling machine based on compliance characteristics[J].Journal of Zhejiang University:Engineering Science,2013,47(7):49 -53.(in Chinese))
[9]劉國斌,龔國芳,朱北斗,等.基于BP神經網絡的盾構推進速度自適應 PID控制[J].工程設計學報,2010,17(6):44 -46.(LIU Guobin,GONG Guofang,ZHU Beidou,et al.Adaptive PID control for thrust speed of the shield based on BP neural networks[J].Journal of Engineering Design,2010,17(6):44 -46.(in Chinese))
[10]王小強,王振,王棟,等.盾構機推進液壓系統方案一例[J].流體傳動與控制,2012(6):23-24.(WANG Xiaoqiang,WANG Zhen,WANG Dong,et al.A case of hydraulicthrust system of shield tunneling machines[J].Fluid Power Transmission and Control,2012(6):23 - 24.(in Chinese))
[11]袁超.EPB-6250土壓平衡盾構機推進系統的復合控制[J].技術與市場,2006(12):28 -30.(YUAN Chao,EPB-6250 thrust system compound control of EPB shield machine[J].Technology and Market,2006(12):28 - 30.(in Chinese))
[12]劉杰,卿啟湘,桂林,等.EPB盾構機推進系統振動響應分析[J].工程設計學報,2013(6):22-24.(LIU Jie,QING Qixiang,GUI Lin,et al.Research on vibration response of EPB thrust system[J].Journal of Engineering Design,2013(6):22 -24.(in Chinese))
[13]姚佳.直動式三通電液比例減壓閥動態性能研究[J].科技創新導報,2012(35):88-89.(YAO Jia.The investigation on dynamic characteristics for direct operated electro-hydraulic three way proportional reducing valve[J].Science and Technology Consulting Herald,2012(35):88 -89.(in Chinese))
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32