三環減速器的力學分析
2014-10-10 06:13:36崔云峰
機電信息 2014年9期
崔云峰
(上海先惠機械有限公司,上海201614)
0 引言
齒輪是一種應用廣泛的機械傳動零件。為了進一步提高齒輪的使用年限和傳動效率,增強負載能力和傳動比等,產生了行星齒輪傳動結構。三環減速器是一種采用內齒行星齒輪傳動結構的新型減速器,其較傳統的齒輪減速器有許多優點,主要體現在減速比大,體積小、重量輕,過載能力強、壽命長,制造容易、成本低等方面。但由于這種新型傳動結構剛剛推向市場,存在著許多問題,解決的方法也就是依靠過往的經驗和簡單的對比來研判,缺乏必要的理論支撐,因此,開展對這種新型傳動的研究,就顯得十分迫切和必要了。
1 三環減速器結構及工作原理
常規的行星齒輪結構為內齒齒輪做中心輪,外齒齒輪做行星輪。內齒行星齒輪的結構剛好相反,其把外齒齒輪做中心輪,內齒齒輪做行星輪,再添加一個偏心套,便得到本文所要研究的內齒行星齒輪傳動結構。
三環減速器采用了內齒行星齒輪,它的運動特點是行星輪通過偏心套的擺動作用而在一個固定平面內做橢圓周平行運動。
三環減速器的基本結構如圖1所示,輸入軸、支承軸和輸出軸相互平行,同時輸入軸和支承軸各自帶有3個互成120°的偏心套,3塊傳動環板通過轉臂軸承安裝在輸入軸和支承軸對應的偏心套上,輸出軸上的外齒輪與環板的內齒構成少齒差嚙合運動副。
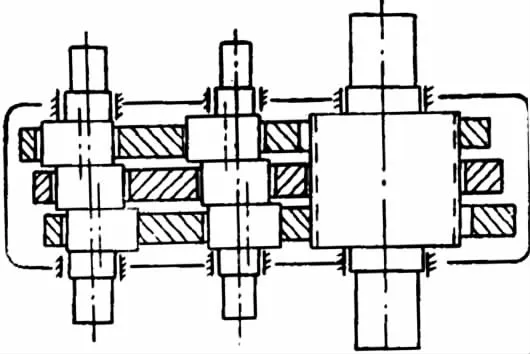
圖1 三環減速器的基本結構
三環減速器輸入軸和支承軸上的3個偏心套相位差為120°,形成類似于曲柄連桿一樣的機構,如圖2所示,從而克服了結構的單向死點問題。
2 轉臂軸承的受力分析
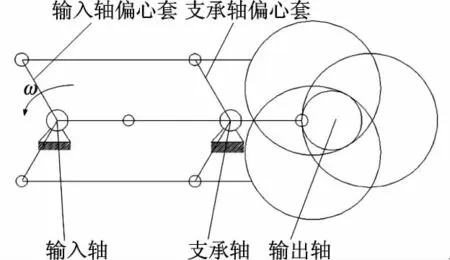
圖2 原理圖
三環減速器在現實的使用過程中也存在諸多問題。內齒行星齒輪傳動結構中,輸入軸A和支承軸B各有3個相位差為120°的偏心套,輸出軸C位于輸入軸A 和支承軸B的一側,我們以其中一塊環板為例,建立其力學模型,其受力情況如圖3所示。環板的重力為G,慣性力為P,作用于質心O。當輸入軸轉動時,環板在A處受到的力有2個,分別為FAt(相切于轉動方向)和FAr(垂直于轉動方向),環板在B處受到的力只有1個,即FBr(垂直于轉動方向),環板在C處與外齒輪嚙合,其所受的力為嚙合力Fn。為了簡化力學模型,我們在此不考慮摩擦力,此時嚙合力Fn相切于基圓。
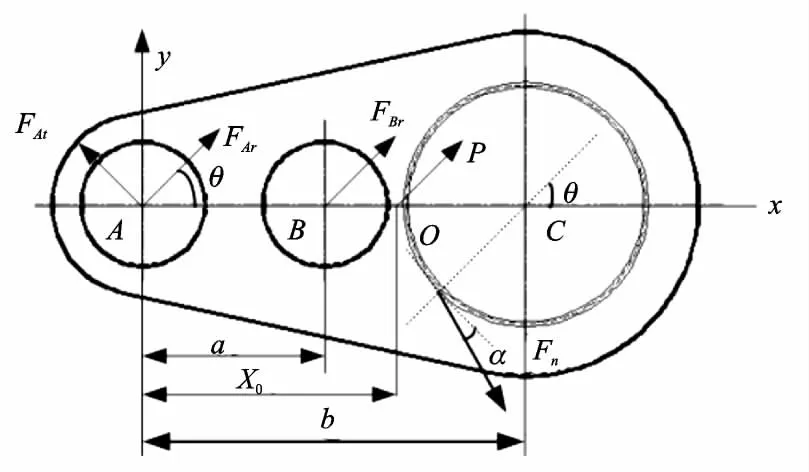
圖3 力學模型
由受力分析平衡條件得:
式中,α′為嚙合角;rb為內齒輪基圓半徑。
求解方程組得:
所以各環板的受力表達式可以綜合為:

式中,j為環板數目,取值為1,2,3。
設輸出軸C上所受力矩為TA,偏心距為e,則:

整理得:

從式(8)可以知道,當θ=0°的時候,FBrj無窮大,這顯然和事實是不相符合的,所以由高等數學微積分我們可以認為當θ=0°時,Fnj=0,這樣才能使整個表達式有一個特定的值。另外,我們推斷每塊環板的運動變化規律是一樣的,都是呈周期性變化,所以可以認為每一塊環板上嚙合力的變化規律也是相同的,我們設為:

式中,j=1,2,3。
將式(12)代入式(11)整理得:

將式(12)代入式(7)(8)(9)簡化得:
式中,j=1,2,3。
所以轉臂軸承合力為:

式中,j=1,2,3。
3 減速器參數及各轉臂軸承受力變化曲線
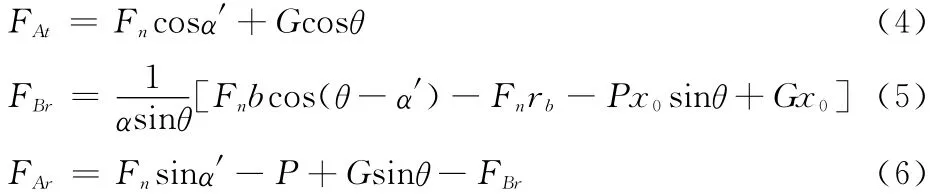
本文研究的三環減速器,其基本參數設為Z1=100,Z2=99,輸入轉速為n=1 500 r/min,模數為m=5,壓力角為α=20°,嚙合角為α′=35°,輸出軸TA=2 000 N·m,a=190 mm,x0=263 mm,L1=11 mm,L2=5 mm,環板質量為 M=25.8 kg,慣性力P=5.06 N。通過C語言編程計算可得0°~360°各轉臂軸承的受力變化曲線。
通過計算分析,我們可以發現輸入軸A上的3個轉臂軸承受力變化情況是完全一樣的,只是在相位上各相差120°。同理,支承軸B上的3個轉臂軸承受力變化情況也是如此。受力曲線圖如圖4和圖5所示。
4 結論
三環減速器采用了新型傳動裝置,該傳動利用三環式傳動原理,具有功率分流、內齒嚙合和多齒接觸的特點,因而具有較高的負載能力,并且傳動效率較高。
圖4 輸入軸A轉臂軸承受力變化
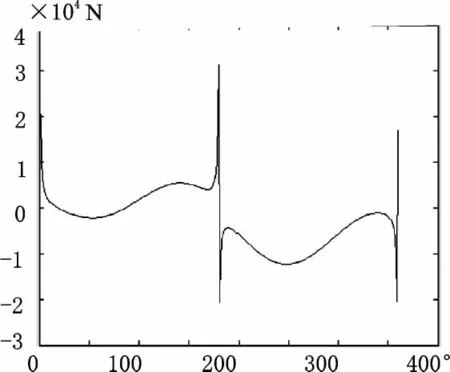
圖5 支承軸B轉臂軸承受力變化
(1)三環減速器是利用3塊互成120°的環板的平動以及內齒輪和外齒輪的嚙合而實現傳動的。
(2)三環減速器通過支承軸上轉矩的相互作用,在某一相死點位置時,通過另外兩相機構的慣性克服死點,從而使得減速器平穩連續地工作。
(3)就某一相的環板來看,當其轉動到180°死點位置時,轉臂軸承的承載力發生了正方向上的跳動;而當其轉動到360°死點位置時,轉臂軸承的承載力發生了負方向上的跳動。可見,轉臂軸承在工作過程中,沖擊振動問題明顯。
(4)根據這個力學模型,我們嘗試著用不同的參數來模擬工況。結果發現,縮小減速器的外形尺寸或者增大齒輪的嚙合角度,都有助于改善轉臂軸承的沖擊問題。
[1]蔣施恩.一種新型減速器——三環減速器[J].冶金礦山設計與建設,1992(2)
[2]張光輝.三環減速器內齒環板應力分析[J].機械工程學報,1994(2)
[3]朱才朝,秦大同,李潤方,等.內齒行星齒輪傳動系統參數動態優化[J].重慶大學學報:自然科學版,1997(2)
[4]戴杜.新型少齒差行星齒輪減速機的模糊可靠性優化研究[D].南寧:廣西大學,2002
[5]濮良貴.機械設計[M].第7版.北京:高等教育出版社,2002
[6]申永勝.機械原理教程[M].北京:清華大學出版社,2002
[7]譚浩強.C程序設計[M].第2版.北京:清華大學出版社,2002
