一種面向芯片轉移的對心檢測方案設計
2014-10-15 09:58:28葉曉濱陳建魁尹周平
制造業自動化 2014年19期
關鍵詞:檢測
葉曉濱,陳建魁,尹周平
(華中科技大學 數字制造技術與裝備國家重點實驗室,武漢 430074)
0 引言
倒裝鍵合技術逐漸成為微電子封裝的主流技術之一[1,2]。在倒裝鍵合技術中,需對芯片進行拾取、翻轉、轉移和貼裝等操作,特別在不同吸嘴間轉移芯片時,需要保證對接吸嘴軸線的對心精度,防止由于對心不良導致的芯片滑移、側立及脫落所引起的封裝失效。
常規對心裝置及檢測方式有:劉慶勝等[3]所述的上下頂尖同軸的調整方法,通過使用百分表或扭簧比較儀對上下頂尖進行軸線調整;Jeong等[4]提出的軸線對準方案,利用激光束、反射鏡和光電二極管等器件,通過成像得出激光束和旋轉平臺軸線之間的偏差,再通過調整激光束位置使得兩者軸線重合;Bell等[5]設計了一種具有兩組撓曲件的柔性光學裝置,通過在撓曲件上施加彎矩使光學元件的光軸中心發生旋轉,最后使得撓曲件的投影線交點與所述的光學元件的光軸重合;盧好蕊[6]在圓柱度儀的對中控制中采用螺旋采點法,將所測數據進行圓柱擬合,得出被測工件軸線的偏心量和傾斜角度,然后進行調節。上述對心檢測方案常為機械式手動調節或改為施加自動調整運動或力,其操作或控制較為繁瑣,通常不滿足自動化工況的要求。
目前,采用機器視覺系統實現高精檢測和對準逐漸成為趨勢。Chen等[7]采用機器視覺對準系統實現絲網印刷的高速定位,Chen等[8]提出了包括視覺引導反饋系統的擁有自動同軸對準能力的機床主軸。采用機器視覺進行對心檢測時,為判斷空間兩物體是否同軸,至少需要從兩個方向上進行觀察。已有方法通常使用多個相機進行觀察或者使用單個相機進行變視角觀察。前者成本過高,且所占空間范圍較大;后者改變相機的位置及角度常引起操作不便,且改變相機位置后難以保證物距相同,需重新調整相機的焦距進行觀察。
因此,為解決倒裝鍵合工藝中對精密對心工藝的需求,克服常規機械式調整的復雜操作,并引入機器視覺的高精檢測優勢,本文擬提出一種基于單相機和光路系統的對心檢測方案,并驗證其效果。
1 對心檢測方案的設計分析
一種基于單相機和光路系統的對心檢測方案從對心光路的設計、對心裝置的結構設計以及對心偏差計算的實現等方面進行論述。
1.1 對心光路及裝置結構設計分析
對心檢測方案的光路設計如圖1所示。光路由被測對象傳出,分為兩路光線,經過一對一次反射鏡,光路變為水平方向。再經過一對二次反射鏡,光路垂直進入相機鏡頭,實現單相機的雙視角采圖。
為了滿足清晰采圖,要求光路的物距等于相機的焦距,即:
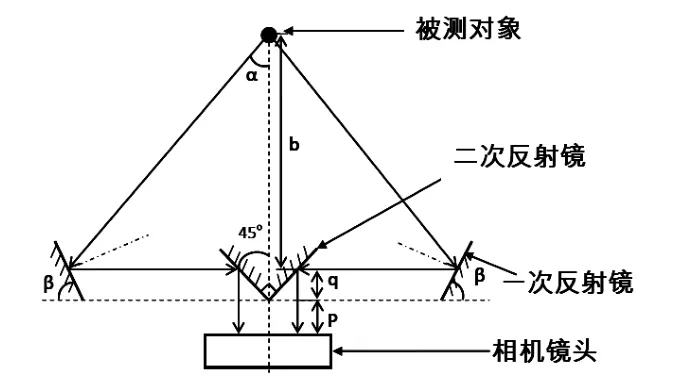
圖1 光路方案原理圖

其中,b為被測對象與二次反射鏡面中心的垂直距離;α為被測對象到一次反射鏡面的光線與豎直方向的夾角;β為一次反射鏡面與水平方向的夾角;二次反射鏡面與水平線的夾角均為45゜,且兩個二次反射鏡面相互垂直;q為二次反射鏡面中心與水平線的垂直距離;p為水平線與相機鏡頭距離;為相機的焦距。
根據的大小值可計算出一次反射鏡面與水平方向的夾角,其滿足:

實際中可根據工況選擇合適的b值,計算出所需值,即可求取對應一次反射鏡面到二次反射鏡面的中心距離和一次反射鏡面需要調整的角度,最后將一次反射鏡鏡面調整到位。
在光路方案基礎上,需進一步在機械結構上考慮滿足功能的支撐、調節機構等,同時還需要考慮到相機的視野范圍,所需的鏡面尺寸等條件。在裝置結構設計以及實際應用中可以適當增加鏡面的寬度和高度,避免因為加工或安裝誤差導致不能完整成像。所設計對心檢測裝置模型如圖2所示,其中兩側遠端旋鈕用來調整一次反射鏡距離二次反射鏡的間距,內側兩旋鈕用來調整一次反射鏡的角度。

圖2 對心檢測裝置模型圖
1.2 對心方案的偏差計算
上述對心方案通過光路和機械結構設計,利用相機和成套反射鏡,可同時采集兩個不同方向上的圖像。然后利用對心的兩者在圖像空間的偏差值,即可反求出被測對象在實際物理空間中的偏差值,最后利用運動平臺完成準確對心的功能。對心方案示意圖如圖3所示。

圖3 對心方案示意圖
A、B兩被測對象在經過雙視角采圖后,從所采集的圖像上可得到被測對象A、B在兩個方向上的距離,且其水平距離分別為c、d,豎直方向上兩被測對象的高度差h相等。假設對心裝置前支架與水平X向的夾角為γ,通過相機鏡頭的物距以及被測對象到二次反射鏡面中心的垂直距離的選擇,可計算出視角α。如圖4所示,光路e1以及e2分別與負Y軸夾角分別為α-γ,α+γ,過A點分別作e1、e2的平行線、e1'、e2',過點B分別做兩條平行線的垂直線,垂足分別是A1、A2,兩條垂直線的長度即為c,d。而后問題轉化為求向量 ,即將A點相對于B點在X、Y方向上的距離設為(m,n),聯合豎直高度差h,則點A相對于點B的空間偏差為(m,n,h)。
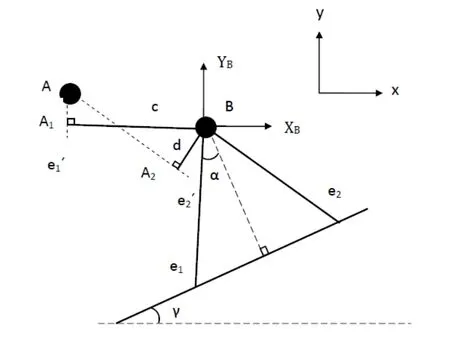
圖4 對心偏差計算示意圖
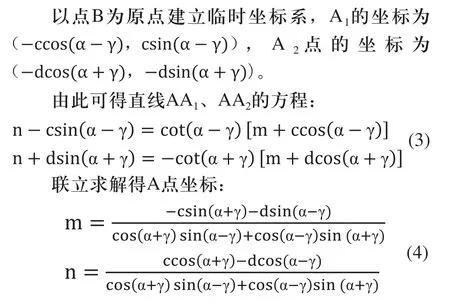
基于B點坐標系所計算出來的A點坐標即可理解為實際物理空間中A、B兩點的位置偏差,通過對心檢測所在裝備的運動系統調整A點的位置,使其與B點重合,即可完成對心檢測和操作功能。
2 對心方案驗證
在RFID標簽封裝設備中,通常采用倒裝鍵合技術完成芯片與天線的互連,此工藝中需通過翻轉頭將芯片從Wafer晶圓拾取,再將芯片翻轉180°后與貼裝頭完成芯片對接,再通過貼裝頭將芯片準確放置到天線焊盤區域[9]。翻轉頭吸嘴與貼裝頭吸嘴交接芯片過程中需要實現兩吸嘴中心的精確檢測和對位,此過程可以通過上述對心檢測方案和裝置實現,實際工況如圖5所示。
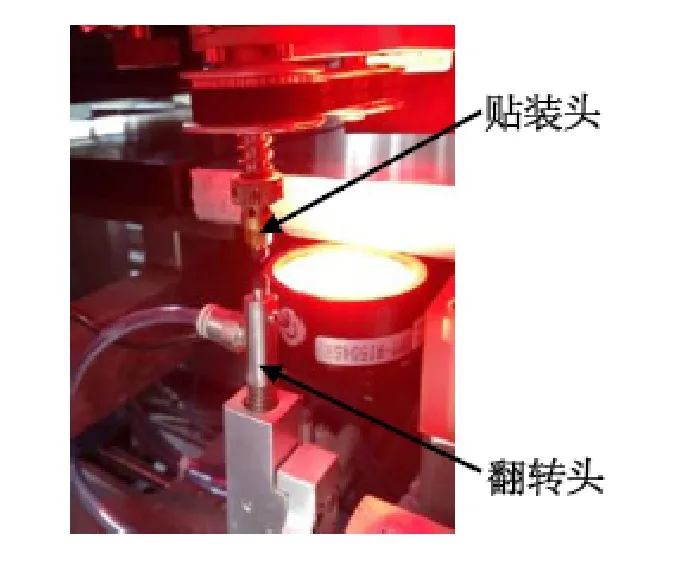
圖5 被測對象所處工況
檢測的目的是使貼裝頭與翻轉頭的軸線重合,保證芯片的正常拾取對接,該對心檢測裝置實物如圖6所示。
在實驗過程中,對心裝置配置德國BASLER acA1300-30gm型號相機,測得貼裝頭和翻轉頭與二次反射鏡面中心的垂直距離都約為240mm,一次反射鏡面與水平方向的夾角約為56°,對心裝置前支架與水平X向的夾角約為35 °。
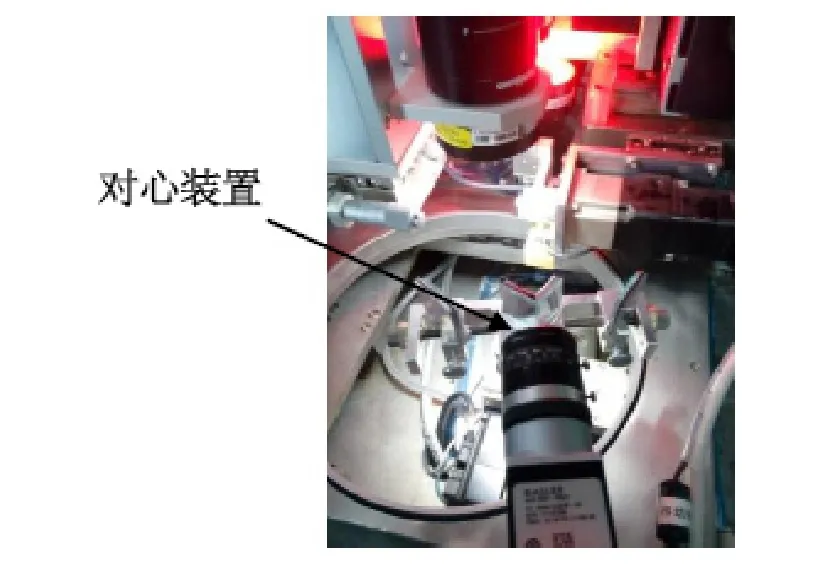
圖6 對心裝置實物圖
在未進行對心調整前,兩被測對象的空間軸線不重合,使用裝置進行雙視角采圖后,相機視野里會同時出現兩個方向上的圖像。圖像顯示,兩吸嘴存在兩個方向上的水平距離差c和d,豎直高度差h基本一致,如圖7所示。

圖7 調整前被測對象狀態
通過系統中貼裝頭的移動,完成初始對心調整和高度移動后,再次利用對心檢測裝置視覺系統采圖,并求解得到初始對心后兩者軸線在圖像的左右兩邊的像素偏差,利用偏差反求計算出被測對象的實際物理距離,并經平臺運動調整予以補償。所采集的圖像如圖8所示,此時可重新求解得到兩被測對象軸線在圖像的左右兩邊的像素偏差。

圖8 對心檢測裝置調整后被測對象狀態
上述實驗過程和數據結果如表1所示,實驗數據表明,翻轉頭與貼裝頭初始對心精度為±20像素,經對心檢測和調整后,對心精度提高至±5像素。

表1 對心偏差對比表
實驗結果顯示該對心檢測方案能在不影響被測對象運動和布局的情況下切實提高倒裝工藝中對心精度,直接證明所述方案中光路設計和偏差計算方法的正確性。
3 結束語
面向倒裝鍵合工藝芯片轉移過程中精確對心需求,本文提出了一種基于單相機的對心檢測方案,設計了能將被測對象進行雙視角采圖的光路和機械裝置,詳細分析了利用所采圖像求解被測對象的空間位置偏差,然后通過偏差補償實現精確對心。RFID標簽倒裝鍵合裝備上完成的實驗表明,利用本對心檢測裝置對雙吸嘴偏差進行檢測補償后,能切實提高對心精度,滿足實際工作需求。
[1]曾苗,廖廣蘭,張學坤,等.基于模態分析的倒裝芯片缺陷檢測[J].振動與沖擊,2013,32(6):24-28.
[2]Vardaman E J,Matthew L.Flip chip market trends[C].SPIE proceedings series.Society of Photo-Optical Instrumentation Engineers, 2001:571-574.
[3]劉慶勝,薛貴俠.上下頂尖同軸的調整方法[J].金屬加工(冷加工),2008(14):47-48.
[4]Jeong S J, Lee S K, Jeong S H.Beam alignment with the axis of a rotation stage for laser fabrication of microcircular structures[J].Optics & Laser Technology,2004,36(5):401-408.
[5]Bell A D, Cronin S R.Two-axis optical adjustment flexure mechanism[A].International Symposium on Optical Science and Technology[C].International Society for Optics and Photonics,2000:237-244.
[6]盧好蕊.面向圓柱度儀的自動對中控制技術研究[D].鄭州:鄭州大學,2012.
[7]Chen C J, Jywe W,Teng Y,et al.To develop a high speed autoalignment system by dual machine vision based alignment system[A].International Conference on Optics in Precision Engineering and Nanotechnology (icOPEN2013)[C].International Society for Optics and Photonics,2013: 87692Q-87692Q-7.
[8]Chen W J, Lin W, Luo H, et al.An Multi-Axis Spindle for Automated Coaxial Alignment[J].Key Engineering Materials, 2010, 447: 503-507.
[9]付宇.RFID標簽封裝設備貼裝頭設計與實現[D].武漢:華中科技大學,2011.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
