傳送帶重量檢測的遠程顯示與處理
2014-10-15 09:14:48孫彥萍孫小飛王子豪
機電信息 2014年23期
孫彥萍 孫小飛 王子豪
(1.山東理工大學電氣與電子工程學院,山東淄博255049;2.山東理工大學機械工程學院,山東淄博255049)
0 引言
在現代工業中,生產過程的機械化、自動化已成為突出的主題,且人機界面的友好發展更加體現了人性化。此外,無線技術的發展使遠程顯示與監控得以廣泛應用,人們可以在控制室對遠方終端系統進行實時監測與控制。自20世紀60年代美國推出可編程邏輯控制器(Programmable Logic Controller,PLC)取代傳統繼電器控制裝置以來,PLC得到了快速發展,在世界各地得到廣泛應用,同時其功能也不斷得到完善。
隨著計算機技術、信號處理技術、控制技術、網絡技術的不斷發展和用戶需求的不斷提高,PLC在開關量處理的基礎上,增加了模擬量處理和運動控制等功能。如今的PLC不再局限于邏輯控制,在運動控制、過程控制等領域也發揮著十分重要的作用。藥品重量檢測是制藥產業中重要的環節,將自動化技術應用到該環節中可以有效提高藥品的檢測效率,節省更多的時間、人力和物力。
1 系統模塊介紹
根據設計的基本要求,傳送帶重量檢測系統共分為6個模塊,分別為藥品重量檢測裝置、NRF905數據無線傳輸模塊、液晶顯示模塊、機械抓手模塊、PLC控制模塊和變頻器模塊。其系統原理如圖1所示。
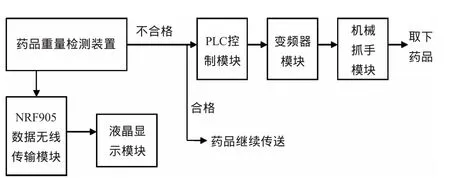
圖1 傳送帶重檢測系統原理圖
1.1 藥品重量檢測裝置
在本裝置中用于稱量的主要器件是稱重傳感器,稱重傳感器在受到壓力或拉力時會產生電信號,受到不同壓力或拉力時產生的電信號也隨之變化,而且力與電信號的關系一般為線性關系。由于稱重傳感器一般的輸出范圍為0~20mV,對于A/D轉換或單片機的工作參數來說,不能使A/D轉換和單片機正常工作,所以需要對輸出的信號進行放大。由于傳感器輸出的為模擬信號,所以需要對其進行A/D轉換為數字信號,以便單片機接收。單片機根據稱重傳感器輸出的電信號和速度傳感器輸出的速度信號計算出物體的重量。
智能儀器一般都具有報警和通訊功能,報警主要用于系統運行出錯、測量的數據超過儀表量程或者是超過用戶設置的上下限時為提醒用戶而設置。在本系統中,設置報警的目的就是在超出電子秤測量范圍時,發出聲光報警信號,提示用戶,防止損壞儀器,同時讓工作人員對不合格產品做出合理的處理。超限報警電路是由單片機的I/O口來控制的,當稱重物體重量超過系統設計所允許的重量時,通過程序使單片機的I/O值為高電平,從而導通三極管,使蜂鳴器發出報警聲,同時使報警燈發光。
1.2 NRF905數據無線傳輸模塊
NRF905芯片內集成了電源管理、晶體振蕩器、低噪聲放大器、頻率合成器、功率放大器等模塊,曼徹斯特編碼/解碼由片內硬件完成,無需用戶對數據進行曼徹斯特編碼,使用非常方便。
由于NRF905具有ShockBurstTM功能,使得NRF905不需要使用昂貴的高速微控制處理器(MCU)對數據處理/時鐘恢復也能達到較高的數據率。通過在芯片上將所有的高速信號處理變為射頻通信協議,NRF905芯片提供了一個具有微控制器能力的SPI接口,數據率由具有微控制器功能的接口速率自行設定。收發電路的數字部分是一個低速率電路,而收發電路的射頻鏈接卻是一個處于最高速率的電路,整個電路要通過變速才能解決速率上的差異。
NRF905芯片的ShockBurstTMTX模式減少了在這一過程中的平均電流消耗。在ShockBurstTMTX模式中,當一個有效地址的數據包被接收時,能夠通過AM和DR這2個信號外送給MCU。另外,在ShockBurstTMTX模式中,NRF905芯片能夠自動地完成報頭的生成和CRC校驗,當發送過程完成后,能夠通過DR信號外送給MCU,發送工作就已經完成。這樣可以降低MCU對內存的要求,使得MCU實現了低成本,同時也縮短了軟件的開發周期。芯片的工作及節能模式如表1所示。
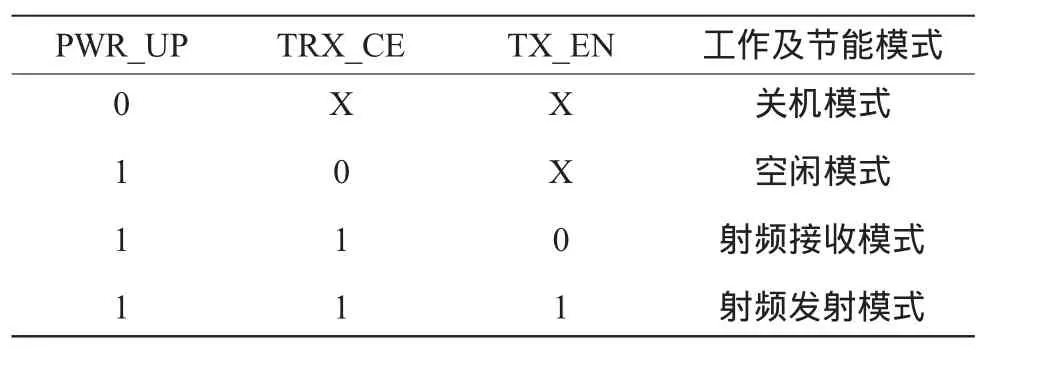
表1 芯片的工作及節能模式
1.3 液晶顯示模塊
液晶是相態的一種,因為具有特殊的理化與光電特性,在20世紀中期開始被廣泛應用于輕薄型的顯示技術上。12864液晶是液晶的一種,是128×64點陣液晶模塊點陣數的簡稱,它不但可以顯示數字、字母,而且可以顯示中文字形與圖形,有良好的顯示功能。此外,12864液晶具有3種不同的控制接口,分別是串行接口、4位微控制器接口和8位微控制器接口,可以方便進行操作控制。
12864液晶功耗小、可靠性高、驅動電壓低、顯示信息量大、成本低、顯示清楚,適用于各種小型設備的顯示領域。基于以上優點,本設計采用12864液晶遠程顯示藥品重量的檢測結果。12864液晶顯示原理如圖2所示。
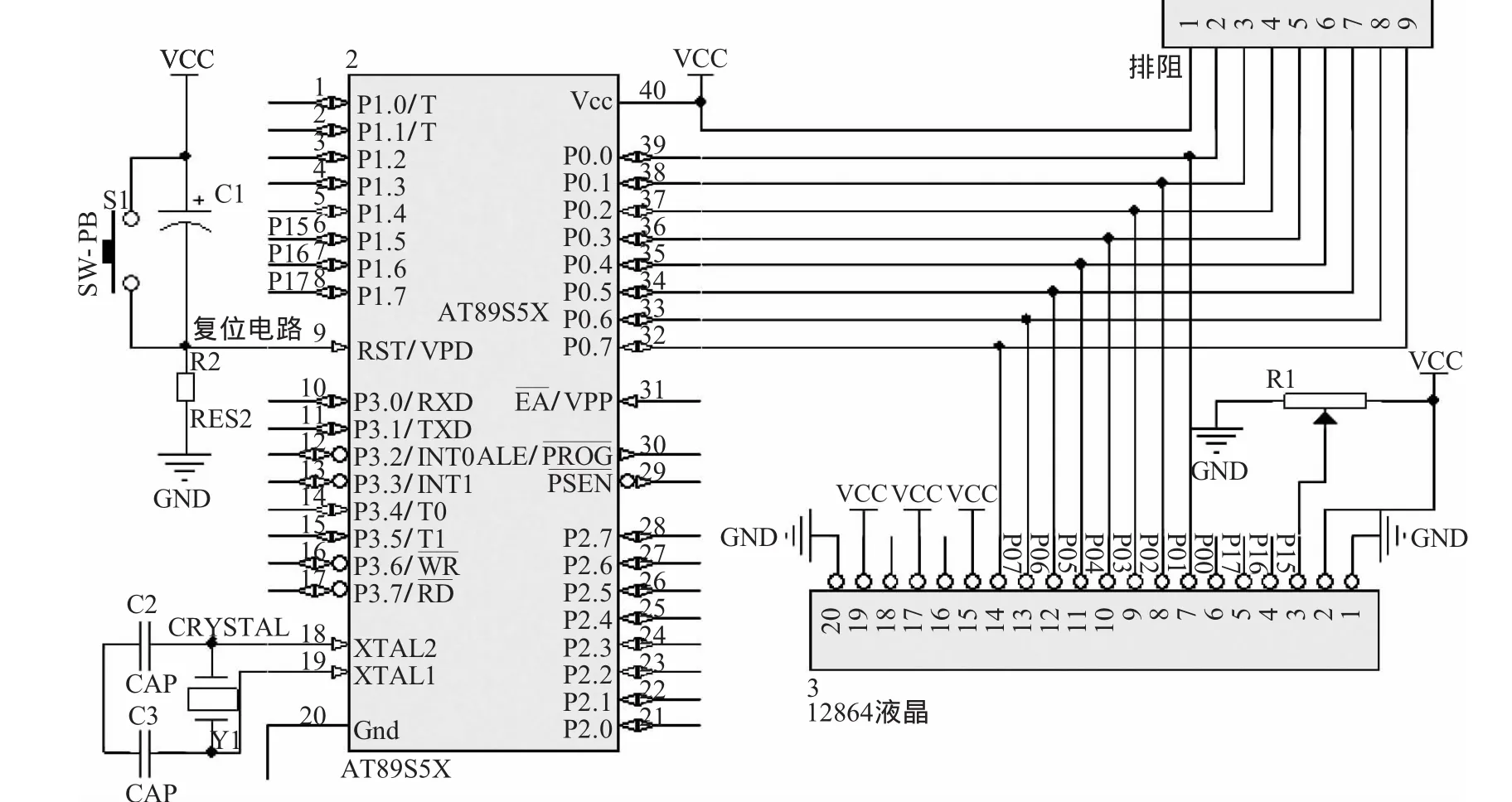
圖2 12864液晶顯示原理圖
1.4 機械抓手模塊
本文采用圓柱坐標式機械抓手來取下不合格藥品。機械抓手的結構如圖3所示。圓柱坐標式機械抓手可以通過轉動豎直立柱來改變機械抓手手臂的方向,通過水平移動或豎直移動來改變水平方向和豎直方向的力臂。機械抓手的工作均由電機驅動,其上升、下降、左移、右移都是由電機驅動螺紋絲桿旋轉來完成的。另外,交流電機的正反轉可以控制機械抓手的張合。
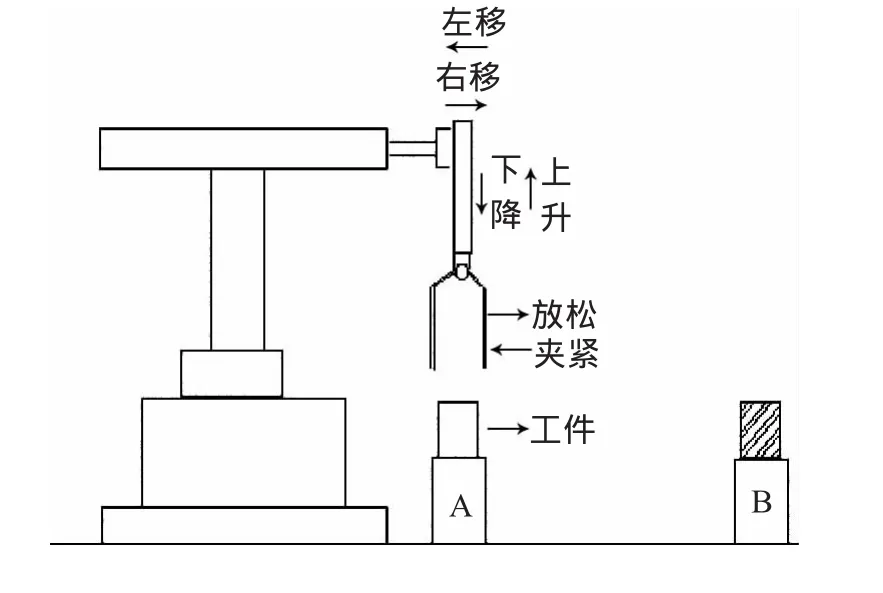
圖3 機械抓手結構圖
1.5 PLC控制模塊
PLC即可編程邏輯控制器,它采用一類可編程的存儲器,用于其內部存儲程序,執行邏輯運算、順序控制、定時、計數與算術操作等面向用戶的指令,并通過數字或模擬式輸入/輸出控制各種類型的機械或生產過程。PLC硬件的基本結構如圖4所示,PLC的工作過程一般分為輸入采樣、用戶程序執行和輸出刷新3個階段。
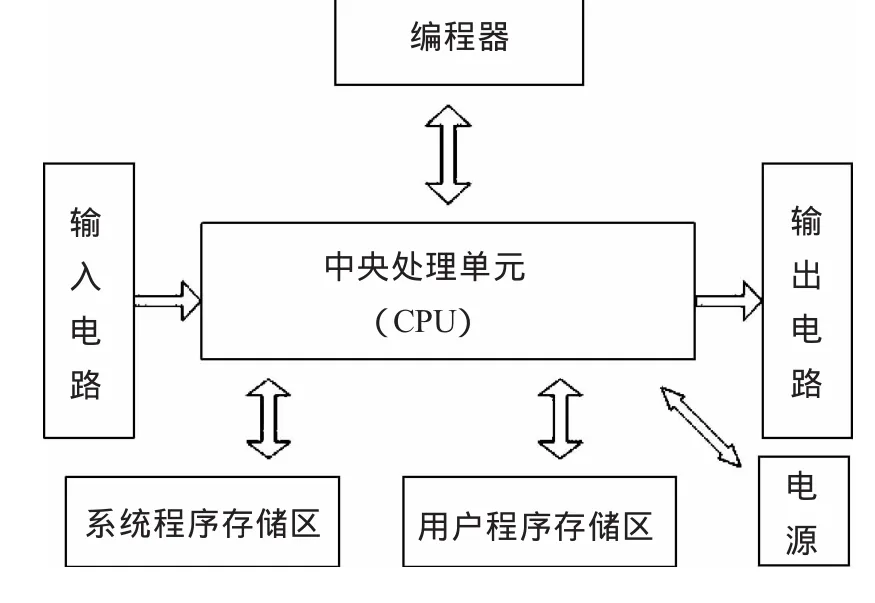
圖4 PLC硬件的基本結構圖
由于PLC抗干擾能力強、編程簡單、操作方便、性價比較高,因此,本設計采用PLC進行控制,由PLC輸出三路脈沖,分別驅動橫軸、豎軸變頻器,以此來控制機械抓手的精確定位。
當藥品重量不合格時,PLC輸出信號,控制機械抓手的上升、下降、左移、右移和夾緊、放松等操作。由于機械手的控制屬于開關量控制,在功能上未提出特殊要求,因此任何型號的小型PLC均可滿足要求。根據所需的I/O總點數并留有一定的備用量,可選用FX2N-48RM,其輸入和輸出各24點,為繼電器輸出型,可以滿足本設計的基本要求。
1.6 變頻器及三相異步電動機模塊
變頻器是應用變頻技術與微電子技術,利用電力半導體器件的通斷作用將工頻電源轉變為另一頻率電能的控制裝置。變頻器主要由整流、濾波、逆變、制動單元、驅動單元、檢測單元和微處理單元等組成,它靠內部IGBT的開斷來調整輸出電源的電壓和頻率,根據電機的實際需要來提供其所需要的電源電壓,進而達到節能、調速的目的。
變頻器能夠實現對交流異步電機的軟啟動和變頻調速,并且能夠提高交流異步電機的運轉精度,改變功率因數。此外,變頻器還有很多保護功能,如過流、過壓、過載保護等。隨著現代工業自動化程度的不斷提高,變頻器也得到越來越廣泛的應用。
三相異步電動機由定子和轉子組成,三相電動機的定子一般由外殼、定子鐵芯、定子繞組等部分組成,定子是用來產生旋轉磁場的。轉子由轉子鐵芯和轉子繞組組成。圖5為三相異步電動機轉動原理示意圖。三相交流電通入定子繞組后,便形成了一個旋轉磁場,其轉速:
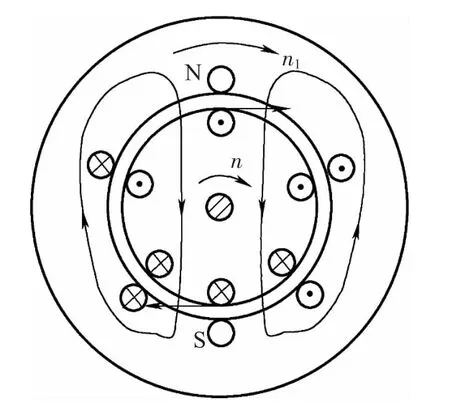
圖5 三相異步電動機的轉動原理
式中n1——轉速,r/m in;
f——電源頻率,Hz;
p——磁極對數,極。
旋轉磁場的磁力線被轉子導體切割,根據電磁感應原理,轉子導體產生感應電動勢。轉子繞組是閉合的,則轉子導體有電流流過。設旋轉磁場按順時針方向旋轉,且某時刻上為北極N、下為南極S,如圖6所示。根據右手定則,在上半部轉子導體的電動勢和電流方向由里向外,用⊙表示;在下半部則由外向里,用表示。
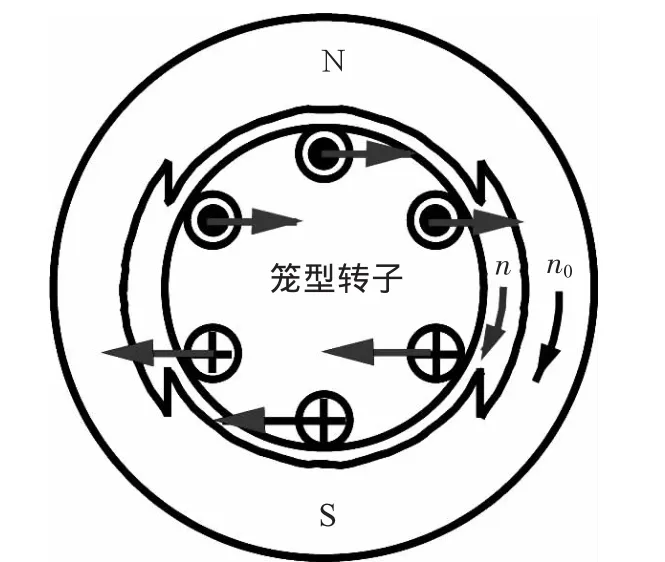
圖6 異步電動機模型圖
2 實際生產應用
在實際制藥生產線上,首先由藥品重量檢測裝置檢測出傳送帶上重量不合格的藥品并發出報警聲,然后經NRF905無線傳輸,將信息傳送到液晶顯示屏上,方便對藥品重量進行遠程顯示和監控。同時由可編程邏輯控制器PLC輸出三路脈沖,驅動變頻器控制三相異步電動機,以此來控制機械抓手將不合格的藥品取下。
3 設計特點
此藥品重量檢測裝置的設計特點:(1)本設計不但可以實現對藥品重量的遠程顯示,而且可以及時取下不合格藥品,自動化程度高。(2)藥品重量檢測裝置能夠準確地檢測出不合格藥品的重量。(3)采用液晶顯示,功耗小,成本低,性能穩定,具有良好的人機交互界面。(4)采用的可編程邏輯控制器PLC編程簡單,操作方便,性價比較高。(5)采用變頻器來實現對機械抓手的精確控制,不但能夠節能、調速,而且能夠實現對電路的保護。
4 結語
目前,各行各業對智能、自動化的設備與儀器的需求越來越迫切,本文所設計出的傳送帶藥品重量檢測遠程顯示與處理系統,不但可以自動檢測并選取合格重量的藥品,而且可以智能地遠程顯示藥品重量情況,符合時代的發展潮流,很好地滿足了制藥企業的發展需求。
[1]王艷春,何鵬,李會.智能電子稱重系統的設計[J].微計算機信息,2007(11)
[2]魏少軒.電子稱重系統傳感器的選用技術[J].計算與測量技術,1996(6)
[3]岳慶來.變頻器、可編程序控制器及觸摸屏綜合運用技術[M].機械工業出版社,2006
[4]周軍.電氣控制及PLC[M].機械工業出版社,2007
猜你喜歡
中國合理用藥探索(2022年1期)2022-11-26 00:22:32
防爆電機(2020年3期)2020-11-06 09:07:42
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
中國衛生(2016年5期)2016-11-12 13:25:28
中國衛生(2015年5期)2015-11-08 12:09:48
電子設計工程(2015年15期)2015-02-27 12:07:30