基于PID方法的汽車(chē)底盤(pán)集成控制研究
2014-10-20 04:55:02婁杰軒徐湜清
婁杰軒,張 蕾,徐湜清
(天津職業(yè)技術(shù)師范大學(xué)汽車(chē)與交通學(xué)院,天津 300222)
汽車(chē)底盤(pán)兩系統(tǒng)集成控制研究中,無(wú)論是建立的懸架制動(dòng)控制器、懸架轉(zhuǎn)向控制器還是制動(dòng)轉(zhuǎn)向控制器,通常存在一定的局限性使得控制結(jié)果難以滿足汽車(chē)在全工況下的整車(chē)性能要求。文獻(xiàn)[1-2]基于廣義預(yù)測(cè)控制的底盤(pán)一體化控制算法,雖然能夠使車(chē)輛實(shí)際運(yùn)動(dòng)狀態(tài)準(zhǔn)確跟蹤期望值,但是主動(dòng)側(cè)傾控制(ARC)所帶來(lái)的車(chē)輪垂向載荷變化可能并不利于橫擺力矩控制(DYC)得到所需的地面附著力,并且汽車(chē)在高速轉(zhuǎn)彎時(shí),車(chē)身側(cè)傾特性的變化也會(huì)由于側(cè)傾轉(zhuǎn)向效應(yīng)影響汽車(chē)的轉(zhuǎn)向精度,從而影響汽車(chē)的操縱穩(wěn)定性。文獻(xiàn)[3-4]中,ABS控制下的轉(zhuǎn)向制動(dòng)雖然能夠縮短制動(dòng)距離、減輕側(cè)滑,但是在此工況下各輪胎載荷發(fā)生轉(zhuǎn)移以及轉(zhuǎn)向系統(tǒng)和縱向制動(dòng)系統(tǒng)之間的相互耦合,改變了各輪胎最大縱向附著力和側(cè)偏特性剛度,從而使輪胎側(cè)偏特性發(fā)生非線性變化,使轉(zhuǎn)向制動(dòng)安全穩(wěn)定難于控制。考慮兩系統(tǒng)控制方法中存在的問(wèn)題,本文建立了包括懸架系統(tǒng)、制動(dòng)系統(tǒng)和轉(zhuǎn)向系統(tǒng)的整車(chē)模型。綜合整車(chē)模型中各子系統(tǒng)間相互影響因素,并加入適當(dāng)?shù)恼{(diào)節(jié)控制器,對(duì)車(chē)輛在縱向、橫向和垂向上進(jìn)行控制調(diào)節(jié),以改善整車(chē)的綜合性能。
1 汽車(chē)仿真模型
本文應(yīng)用文獻(xiàn)[5]中的一個(gè)包括垂直運(yùn)動(dòng)、橫向運(yùn)動(dòng)和車(chē)輛縱向運(yùn)動(dòng)的14自由度的統(tǒng)一車(chē)輛模型,如圖1所示。圖中相關(guān)參數(shù)含義如下:Ms為簧載質(zhì)量;Muij為非簧載質(zhì)量(i=f,r表示前后;j=l,r表示左右,以下類似);θ為車(chē)身俯仰角;γ為橫擺角速度;φ為車(chē)身側(cè)傾角;β為車(chē)身側(cè)偏角;Lf為質(zhì)心到前軸的距離;Lr為質(zhì)心到后軸的距離;Ksij為懸架剛度;Kuij前后輪垂直剛度;Kaij為輪胎的側(cè)偏剛度;Csij為懸架阻尼系數(shù);h為側(cè)傾力臂;Fyij為橫向輪胎力;Zsij為懸架與懸掛連接點(diǎn)處垂直位移;Zuij為非簧載質(zhì)量垂向位移;Zoij為路面輸入位移。
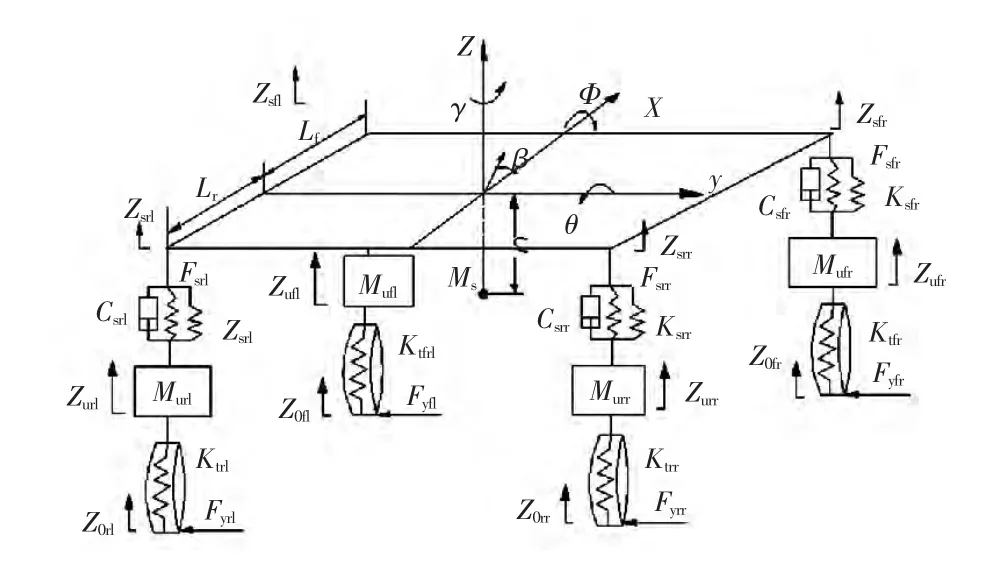
圖1 車(chē)輛運(yùn)動(dòng)模型
2 控制器的設(shè)計(jì)
2.1 PID集成控制器的設(shè)計(jì)
綜合考慮汽車(chē)行駛中的縱向、橫向和垂向動(dòng)力學(xué)對(duì)整車(chē)安全性的影響以及三者之間的關(guān)系,建立了基于PID算法的懸架系統(tǒng)、轉(zhuǎn)向系統(tǒng)和制動(dòng)系統(tǒng)的集成控制器,如圖2所示。集成控制器包含懸架系統(tǒng)、轉(zhuǎn)向系統(tǒng)和制動(dòng)系統(tǒng)的獨(dú)立控制器。控制器的輸入?yún)?shù)分別為:車(chē)身側(cè)傾角(φ)、車(chē)身側(cè)偏角(β)、前輪滑移率(η);輸出參數(shù)分別為:車(chē)身側(cè)傾控制力(Fc)、車(chē)身側(cè)偏控制力(Fp)、制動(dòng)控制力(Fz)。

圖2 集成控制器總成示意圖
PID是一種經(jīng)典的控制方法,利用相對(duì)控制誤差(目標(biāo)值-受控量)的比例、積分和微分,通過(guò)線性組合決定受控對(duì)象的控制量[6]。其控制規(guī)律為:

式中:Kp、Ki、Kd分別為比例增益系數(shù)、積分增益系數(shù)和微分增益系數(shù);e(t)為反饋信號(hào)和輸入信號(hào)的差。
采用一個(gè)帶有濾波白噪聲信號(hào)作為整車(chē)模型的路面輸入,其表達(dá)式為:

式中:f0為下截止頻率;GO為路面不平度系數(shù);Vx為縱向車(chē)速;ωO(t)為均值為零的高斯白噪聲。
2.2 主動(dòng)懸架控制器的設(shè)計(jì)
主動(dòng)懸架的動(dòng)力學(xué)方程為:
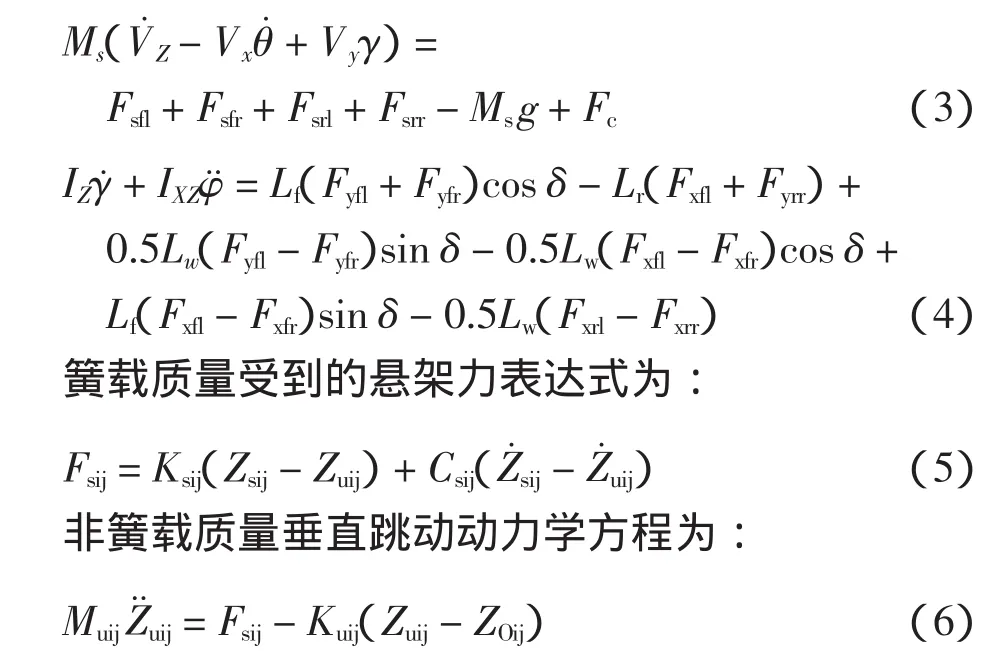
考慮到車(chē)身側(cè)傾角φ和俯仰角θ在小范圍內(nèi)時(shí),懸架與懸掛連接點(diǎn)處的垂直位移近似有
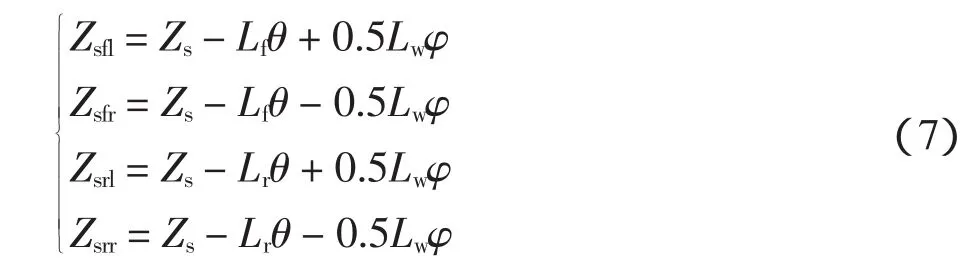
式中:Fxij為縱向輪胎力;δ為前輪轉(zhuǎn)角(假設(shè)左右車(chē)輪轉(zhuǎn)角相同);Vy為橫向車(chē)速;Vz為車(chē)身垂直速度;Lw為輪距;Zs為車(chē)身垂直位移;Ixz為簧載質(zhì)量對(duì)x,z兩軸慣量積;Iz為橫擺轉(zhuǎn)動(dòng)慣量;Fc為側(cè)偏控制力。
建立的主動(dòng)懸架的控制器如圖3所示。
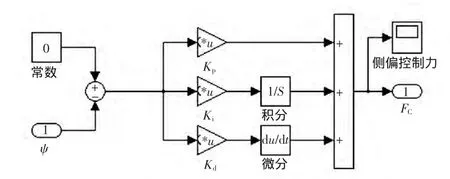
圖3 主動(dòng)懸架控制器
車(chē)輛行駛過(guò)程中受到同路面激勵(lì)時(shí),引起作用在各輪胎上的載荷力發(fā)生變化,進(jìn)而引起各個(gè)懸架系統(tǒng)上的受力產(chǎn)生轉(zhuǎn)移導(dǎo)致車(chē)身的傾斜。這不僅降低了乘坐舒適性,而且行車(chē)中容易出現(xiàn)安全隱患。因此,在控制策略上主要以減小或消除車(chē)身的傾斜為目標(biāo)。懸架的控制器選用車(chē)身側(cè)傾角φ(參考值為0)為輸入?yún)?shù),輸出為側(cè)偏控制力Fc。控制器中整定后的參數(shù)值:Kp=240;Ki=135;Kd=0.01。
2.3 轉(zhuǎn)向控制器的設(shè)計(jì)
轉(zhuǎn)向動(dòng)力學(xué)方程為:

式中:Iy為俯仰轉(zhuǎn)動(dòng)慣量;hθ為質(zhì)心至縱傾軸垂直距離;Fp為附加側(cè)偏力。
車(chē)輛轉(zhuǎn)彎工況時(shí),基于輪胎和地面作用產(chǎn)生的橫擺運(yùn)動(dòng)加劇了汽車(chē)不穩(wěn)定性,使車(chē)輛的實(shí)際行駛方向與預(yù)定方向存在一定的偏差。因此,轉(zhuǎn)向控制器選取實(shí)際車(chē)身側(cè)偏角β(參考值為0)作為控制參數(shù)的輸入,對(duì)車(chē)輛進(jìn)行附加側(cè)偏力Fp的干預(yù),以減小車(chē)輛行駛中方向上的偏差,使車(chē)輛回歸到預(yù)定軌跡為目的。轉(zhuǎn)向控制器與懸架控制器類似,整定后的PID參數(shù):Kp=5350;Ki=460;Kd=0。
2.4 制動(dòng)控制器的設(shè)計(jì)
制動(dòng)動(dòng)力學(xué)方程為:

式中:Ix為側(cè)傾轉(zhuǎn)動(dòng)慣量;hφ為質(zhì)心至側(cè)傾軸垂直距離;Tbi為車(chē)輪的制動(dòng)力矩;M為車(chē)輛總質(zhì)量;ωij為車(chē)輪的角速度;R為車(chē)輪滾動(dòng)半徑;Fz為制動(dòng)控制力。
由于所建立的模型仿真情景是車(chē)輛在轉(zhuǎn)向時(shí)采取制動(dòng)措施,而這種車(chē)況下易發(fā)生車(chē)輪的抱死致使汽車(chē)發(fā)生側(cè)滑,引起行駛車(chē)輛的安全問(wèn)題。因而選取車(chē)輛的滑移率η(參考值為0.2)作為輸入的控制參數(shù),輸出控制力Fz,對(duì)制動(dòng)力加以調(diào)控防止車(chē)輪抱死導(dǎo)致車(chē)輛側(cè)滑。制動(dòng)控制器同懸架控制器類似,整定后的參數(shù)為:Kp=1350;Ki=235;Kd=0。
3 仿真結(jié)果分析
設(shè)汽車(chē)初始速率為19.8 m/s,在Matlab/Simulink環(huán)境下進(jìn)行仿真。仿真環(huán)境:仿真時(shí)間達(dá)到1 s時(shí),對(duì)模型中方向盤(pán)輸入值為0.58 rad的階躍轉(zhuǎn)角,并在仿真時(shí)間達(dá)到6 s時(shí)對(duì)模型采取制動(dòng)措施,仿真時(shí)長(zhǎng)為15 s。模型中相關(guān)變量取值如表1所示。

表1 整車(chē)模型參數(shù)值
為了體現(xiàn)多系統(tǒng)集成控制與兩系統(tǒng)集成控制的對(duì)比效果,綜合考慮了汽車(chē)縱向、橫向和垂向3個(gè)運(yùn)動(dòng)方向上的動(dòng)作情況,并選取了對(duì)應(yīng)3個(gè)方向上的評(píng)定參數(shù),分別為圖4的車(chē)身側(cè)傾角、圖5的車(chē)輪滑移率以及圖6的車(chē)身側(cè)偏角。圖中“無(wú)控制”表示建立的三系統(tǒng)整車(chē)模型未加入任何主動(dòng)控制器仿真獲得的曲線;“懸架+制動(dòng)”表示建立的三系統(tǒng)整車(chē)模型在主動(dòng)懸架控制器與主動(dòng)制動(dòng)控制器工作時(shí)得到的仿真曲線;“懸架+制動(dòng)+轉(zhuǎn)向”表示建立的三系統(tǒng)整車(chē)模型在主動(dòng)懸架控制器、主動(dòng)制動(dòng)控制器以及主動(dòng)轉(zhuǎn)向控制器同時(shí)工作時(shí)得到的仿真曲線。

圖4 車(chē)身側(cè)傾角

圖5 車(chē)輛前輪滑移率
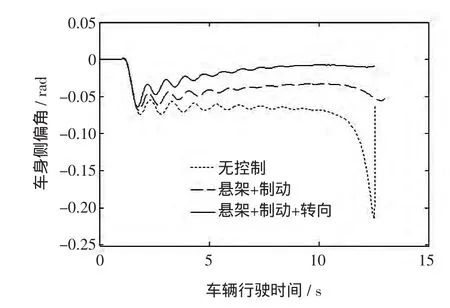
圖6 車(chē)身側(cè)偏角
仿真表明,評(píng)定車(chē)輛性能參數(shù)的車(chē)身側(cè)傾角、車(chē)輪滑移率和車(chē)身側(cè)偏角,最大峰值和振動(dòng)幅值均不同程度地實(shí)現(xiàn)了減小、降低,穩(wěn)態(tài)值也更加趨近期望值。圖4中側(cè)傾角的振動(dòng)幅值在兩系統(tǒng)控制下相比無(wú)控制減小了近45%,三系統(tǒng)相對(duì)兩系統(tǒng)減少了近35%,使車(chē)身側(cè)傾角更加迅速地趨于穩(wěn)態(tài),保證了車(chē)輛的舒適性與安全性。圖5中的滑移率值在無(wú)控制下為1.0,車(chē)輪出現(xiàn)抱死拖滑現(xiàn)象;在主動(dòng)懸架與主動(dòng)制動(dòng)控制下降至0.35附近,車(chē)輪滑動(dòng)成分大幅降低;在三系統(tǒng)控制下逼近理想狀態(tài)值0.2,此時(shí)車(chē)輛具備了較強(qiáng)的制動(dòng)與轉(zhuǎn)向能力,保障了汽車(chē)行駛中的安全性。圖6中的車(chē)身側(cè)偏角穩(wěn)態(tài)值由-0.07 rad降到了-0.025 rad,再降到了-0.01 rad附近,相應(yīng)的降幅比分別為64.3%和60%。
綜合懸架系統(tǒng)、轉(zhuǎn)向系統(tǒng)和制動(dòng)系統(tǒng)的集成控制,顯著降低了車(chē)身側(cè)傾角、車(chē)輪滑移率和車(chē)身側(cè)偏角,與被動(dòng)系統(tǒng)、兩系統(tǒng)相比,提高了車(chē)輛的操縱穩(wěn)定性、行駛的平順性以及行車(chē)的安全性。
4 結(jié)論
(1)針對(duì)兩系統(tǒng)集成控制研究中的問(wèn)題,建立了包含懸架系統(tǒng)、轉(zhuǎn)向系統(tǒng)及制動(dòng)系統(tǒng)的整車(chē)動(dòng)力學(xué)模型,并通過(guò)將主動(dòng)懸架、主動(dòng)轉(zhuǎn)向和主動(dòng)制動(dòng)技術(shù)進(jìn)行集成控制,進(jìn)一步提高了整車(chē)的操縱性能以及行駛中的安全性能。
(2)在三系統(tǒng)集成控制下,車(chē)身側(cè)傾角的最大幅值和振動(dòng)幅值都在很大程度上得到了改善,提高了車(chē)輛的乘坐舒適性。
(3)車(chē)輪滑移率在三系統(tǒng)集成控制下趨于理想值,這既保證了車(chē)輛制動(dòng)工況所需的地面附著力,同時(shí)又具備了良好的轉(zhuǎn)向能力,充分提高了汽車(chē)行駛的安全性。
(4)車(chē)身側(cè)偏角相比無(wú)控制與兩系統(tǒng)的集成控制下,其穩(wěn)態(tài)值更加平穩(wěn)、快速地趨于理想值,這不僅保證了車(chē)輛在復(fù)雜工況行駛中方向的穩(wěn)定性,而且也提升了整車(chē)的綜合性能。
[1]夏長(zhǎng)高,楊錫鶴.四輪轉(zhuǎn)向與主動(dòng)懸架系統(tǒng)集成控制研究[J].拖拉機(jī)與農(nóng)用運(yùn)輸車(chē),2007,34(5):63-69.
[2]劉力,羅禹貢,江青云,等.基于廣義預(yù)測(cè)理論的AFS/DYC底盤(pán)一體化控制[J].汽車(chē)工程,2011,33(1):52-55.
[3]初長(zhǎng)寶,陳無(wú)畏.汽車(chē)底盤(pán)系統(tǒng)分層式協(xié)調(diào)控制[J].機(jī)械工程學(xué)報(bào),2008,44(2):157-162.
[4]朱忠奎,郭旭紅,劉剛.轉(zhuǎn)向工況下的汽車(chē)制動(dòng)防抱死控制的仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2009,21(10):2994-2998.
[5]來(lái)飛,鄧兆祥,董紅亮.基于統(tǒng)一模型的轉(zhuǎn)向懸架系統(tǒng)最優(yōu)綜合控制方法[J].汽車(chē)工程,2007,29(3):238-242.
[6]WANG J,WILSON D A,XU W L,et al.Active suspension control to improve vehicle ride and steady-state handling[C]//Proceedings of the 44th IEEE Conference on Decision and Control,and the European control Conference.Piscataway(USA):IEEE Computer Society,2005:1982-1987.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19