基于線性化EKF的永磁同步電機無位置傳感器控制
2014-10-20 08:54:48朱李超
大電機技術 2014年2期
朱李超
?
基于線性化EKF的永磁同步電機無位置傳感器控制
朱李超
(上海大學機電工程與自動化學院,上海200072)
本文分析了傳統擴展卡爾曼濾波器在永磁同步電機無位置傳感器控制中的應用原理,針對其非線性、計算量大的特點,構建了旋轉坐標系下的擴展卡爾曼濾波器模型,并考慮了轉動慣量的影響,最終提出了一種基于換元法的線性化算法。通過理論推導和仿真實驗,比較分析了該算法和傳統擴展卡爾曼濾波器算法。結果表明該算法計算量小,能準確地估計轉子位置和轉速,具有良好的穩態精度和動態特性。
擴展卡爾曼濾波器;永磁同步電機;無位置傳感器
0 前言
永磁同步電機(PMSM)因其具有結構簡單、體積小、重量輕、損耗小、效率高的特點而被廣泛應用于工業生產場合,如電動汽車、精密機床、軌道交通、船舶推進、航空航天等等。一般的永磁同步電機閉環控制系統中,為了得到轉子位置和速度信號,需要在轉軸上安裝傳感器。這類傳感器會造成控制系統環境適應性差、體積增加、成本上升等問題。因此,在二十世紀末期,永磁同步電機的無位置傳感器技術應運而生。

1 傳統擴展卡爾曼濾波數學模型




根據擴展卡爾曼濾波器理論,將狀態轉移矩陣進行泰勒級數展開并忽略高次項得到系統在最優點附近的近似線性化模型。當濾波周期T足夠小時,可將系統離散化,最后得到擴展卡爾曼濾波器的離散化狀態轉移矩陣:
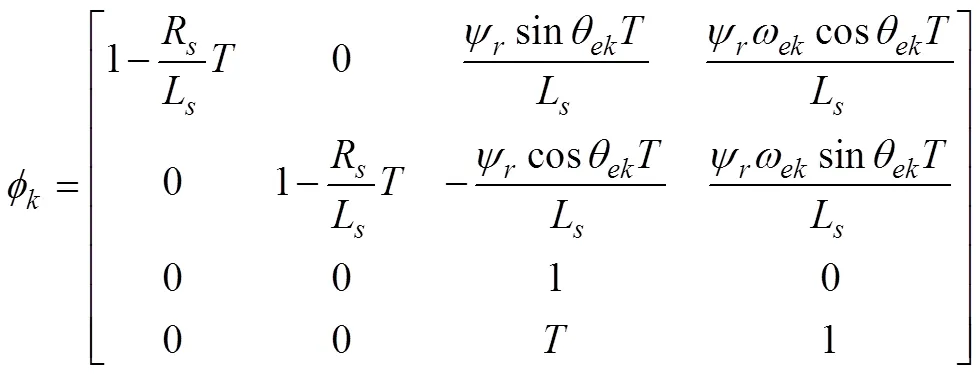
將式(3)~(5)代入擴展卡爾曼濾波方程即為傳統擴展卡爾曼濾波器模型,濾波分為兩個步驟。
預測階段:


校正階段:



2 線性化擴展卡爾曼濾波數學模型



從式(11)中可知該模型為非線性模型,為了將其線性化,可進行如下變量代換[8]:

又因為表貼式永磁同步電機電感、電磁轉矩滿足如下關系:

將式(12)~(14)代入式(11)可得:





將式(17)、(18)代入式(19)可得:

從式(20)可知可觀、可控矩陣都為滿秩,即變換后的系統保留原有系統的可控性和可觀測性。于是當濾波周期T足夠小時,可將系統離散化,得到線性化擴展卡爾曼濾波器的離散化狀態轉移矩陣:


3 仿真結果
本文利用matlab 7.1的Simulink工具箱搭建仿真平臺。控制系統結構框圖如圖1所示,控制策略采用轉子磁場定向的電流、轉速雙閉環控制,控制方式采用空間矢量脈寬調制方法(SVPWM)。表1為永磁同步電機參數。

圖1 線性化EKF控制系統結構框圖

表1 永磁同步電機參數

圖2 給定時轉速響應波形

圖4 轉速、轉矩突變下系統動態響應波形

4 結論

[1] Rusong Wu, Gordon R.Slemon. A Permanent Magnet Motor Drive Without a Shaft Sensor[J]. IEEE Trans. On Industry Applications, 1991, 27(5): 1005-1011
[2] Ashok B.Kulkarni, Mehrdad Ehsani. A Novel Position Sensor Elimination Technique for the Interior Permanent-Magnet Synchronous Motor Drive[J]. IEEE Trans. On Industry Applications, 1992,28(1): 1005-1011
[3] Ji-Hoon Jang, Jung-IK Ha. Analysis of Permanent Magnet Machine for Sensorless Control based on High Freuqency Signal Injection[J]. IEEE Trans. On Industry Applications, 2004,40(6): 1005-1011
[4] Sakorn Po-ngam, Somboon Sangwongwanich. Stability and Dynamic Performance Improvement of Adaptive Full-Order Observers for Sensorless PMSM Drive [J]. IEEE Trans. On Power Electronics, 2012,27(2): 588-600
[5] Ran Li, Guangzhou Zhao. Position Sensorless Control for PMSM Using Sliding Mode Observer and Phase-Locked Loop[J]. IEEE Trans. Power Electronics and Motion control conference, 2009:1867-1870
[6] Silverio Bolognani, Luca Tubiana.Extended Kalman Filter Tuning in Sensorless PMSM Drives[C]. IEEE Trans. On Industry Applications, 2003,39(6): 1741-1747
[7] S.Stasi, L.Salvatore. Sensorless Control of PM Synchronous Motors Based on LKF Estimation of Rotor Position[J]. IEEE Trans. On Industry Electronics Society, 2002,1(1): 686-691
[8] Persson,J, Perriard,Y. Steady State Kalman Filtering for Sensorless Control of Hybrid Stepper Motors[C].IEEE. Electric Machines and Drives Conference, 2003:1174-1171
Sensorless Control for PMSMs Based on Linear EKF
ZHU Lichao
(School of Mechatronics Engineering and Automation, Shanghai University, Shanghai 200072, China)
The traditional extended Kalman filter(EKF) theory used for PMSMs senorless control is analyzed. In allusion to its nonlinear and large amounts of calculation, a model of EKF in consideration of the effect of inertia in the rotating coordinate is created and a linear algorithm based on the method of substitution is presented. The new algorithm is compared with the traditional EKF algorithm by theoretical derivation and simulation analysis. The results show that the proposed algorithm has a small calculation and it can accurately estimate rotor position and speed with good static and dynamic performance.
EKF; PMSMs; sensorless control
TM341
A
1000-3983(2014)02-0010-04
2013-07-15
朱李超(1987-),2013年3月畢業于上海大學自動化系電機與電器專業,碩士,從事永磁同步電機控制技術研究。

審稿人:宮海龍
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28