CAN總線造波機測控系統研制與應用
2014-10-22 15:22:42潘瓊文
自動化儀表 2014年8期
關鍵詞:系統
戚 磊 陳 趙 潘瓊文 崔 巖 韓
(中國船舶重工集團公司第七0二研究所,江蘇 無錫 214082)
CAN總線造波機測控系統研制與應用
(中國船舶重工集團公司第七0二研究所,江蘇 無錫 214082)
為了更準確地模擬波浪對物體的影響,設計并研制了CAN總線造波機測控系統。該系統由工控機、交流伺服控制器、伺服電機等主要部件組成,采用CAN總線通信。硬件方面設計了電氣控制柜,軟件方面設計了人機操作界面,造波環節采用位置閉環控制,波浪測量環節采用開環控制。實際應用中系統測控能力強,所測波浪數據穩定性好、精度高,驗證了該系統具有優越的測控性能及造波性能。
CAN總線 交流伺服 造波機 測控系統 人機界面
0 引言
造波機是一種與海浪試驗水池配套的基礎設施。它的作用是在試驗水池中造成不同波長和波高的波浪,模擬實際波浪對船舶或建筑等的影響,以測定各種技術數據,為相關設計提供依據。造波機形式多樣,包括搖板、推板、沖箱、壓縮空氣等,實現方式有電液伺服、交流伺服電機等[1-2]。無論哪種形式的造波機,其測控系統始終是整個造波機的靈魂。測控系統的品質決定了造波機的品質,包括波浪種類、精度、穩定性以及操作便易度、安全性能等。
本文所研制的造波機測控系統是應用于試驗水槽的推板式造波機。該測控系統是以基于CAN總線通信的伺服電動機來實現的。系統具有操作方便、穩定可靠、控制精確等特點,所制波浪具有高度高、穩定性好、精度高等特點。
1 系統總體結構
本測控系統由上位機、CAN通信適配卡、交流伺服控制器、交流伺服電機、旋轉變壓器、造波推板、浪高儀、A/D采集卡等組成,如圖1所示。
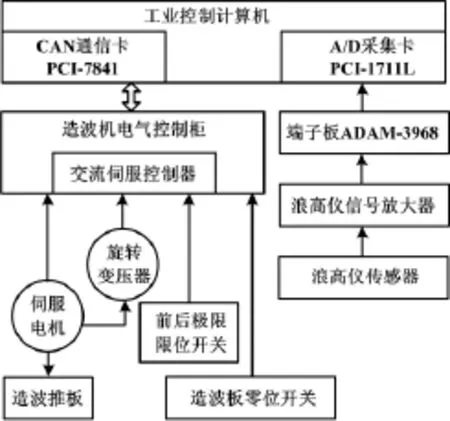
圖1 測控系統總體結構圖Fig.1 Structure of themeasuring and controlling system
測控系統在造波測控部分采用位置閉環控制。上位機通過CAN通信適配卡與交流伺服控制器建立CAN通信連接,上位機以CAN總線通信方式下發控制指令至伺服控制器。伺服控制器與伺服電機之間通過動力電源線建立動力連接,驅動電機運轉。由旋轉變壓器檢測電機實際相位并通過信號線反饋至伺服控制器。伺服控制器將電機相位、伺服狀態、報警信號等實時信息以 CAN總線通信上傳至上位機,形成閉環控制。
測控系統在波浪測量部分采用開環控制。上位機發出波浪采集指令,由浪高儀對實際波浪進行采集,通過A/D采集卡上傳至上位機,進行記錄分析并保存。
2 CAN總線通信設計實現
在測控系統中,上位機是大腦,交流伺服控制器是心臟,兩者之間的通信至關重要。本設計采用CAN總線方式進行通信。
設計中選用倫茨伺服9300系列伺服控制器。利用伺服控制器自帶的CAN功能模塊,通過相應配置即可實現CAN通信。上位機配備一塊CAN通信適配卡,選用PCI-7841,即插即用。同時,其自帶相應的驅動函數庫,可進行簡單調用,省去很多編程工序。
在伺服控制器中,CAN功能模塊相關參數設置至關重要。CAN通信時間依賴于以下幾個因素:控制器處理時間、報文時間、數據優先級、總線負荷等。其中,在設計中可設置的有控制器處理時間和報文時間兩個參數。參數數據處理時間大約為30~50ms,過程數據大約需1~2ms;報文時間受波特率和報文長度影響,這里波特率設為500 kbit/s。設置系統總線地址,通過C0358=1置位,可進行基本通信。
3 系統硬件設計實現
造波機測控系統硬件組成部分中電控柜是關鍵。上位機和執行部件伺服電機通過電控柜建立連接,進行控制與反饋。電控柜是以倫茨伺服控制器為核心來設計實現的。伺服控制器外圍電路原理圖如圖2所示。
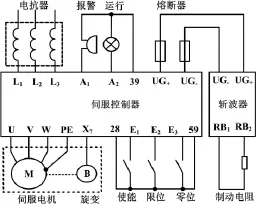
圖2 伺服控制器外圍電路原理圖Fig.2 The peripheral circuit of the servo controller
為改善輸入電源品質,在伺服控制器輸入電源前的主回路中采用了電抗器。
倫茨伺服控制器自身具備數字量輸入輸出端子模塊X5,可通過對系統參數C0114、C0117、C0118的設置,任意配置模塊X5中端子的高、低電平有效,使其作為控制信號和監控信號使用。本設計通過配置,將這些端子用作使能控制、極限限位、運行指示、故障報警等信號。
反饋系統采用旋轉變壓器對電機轉速位置等信號進行檢測,反饋信號通過輸入模塊X7接收。制動系統采用制動斬波器對瞬間多余的能量進行處理,防止對設備造成損害。為保障輸入輸出信號質量,所有的線纜均采用屏蔽電纜來實現。
4 系統軟件設計實現
造波機測控系統中,所有的測控指令都是通過上位計算機人機操作界面來輸入并下發,所有的實時反饋信息、測量采樣以及圖形曲線顯示都是通過人機操作界面來讀取。為此,采用VB軟件編制了本測控系統的人機操作界面控制系統。其主要由以下5個功能塊組成。
①CAN總線通信模塊。上位機測控系統與伺服控制器之間采用系統總線(CAN)通信。這里CAN協議采用的報文格式為標準格式。在標準格式中,首先是報文的起始位(SOF);接著是由11位標志符和遠程發送請求位(RTR)組成的仲裁場;然后是6位的控制場,它包括標志符擴展位(IDE)、保留位、4個字節的數據長度(DLC);其次是8個字節的數據場;其后是一個循環冗余檢查(CRC);應答場(ACK)包括應答位和應答分隔符;最后是幀結束。
②狀態監控模塊。監控伺服通信、伺服準備、伺服運行、伺服故障、造波板零位、造波板前后極限、造波板位置狀態等信號。
③自動尋零模塊。造波啟動使能后,首先判斷造波板是否處于造波零位,若未處于零位,則自動尋零,找到零位后才開始造波。
④規則波測控模塊。包括參數設置模塊、啟停模塊、采樣模塊、圖形曲線顯示模塊。在參數設置模塊中,設置規則波的輸入參數(頻率、波高或造波板沖程、時間)后,控制系統生成造波目標曲線。當造波啟動使能后,若造波板處于零位,控制系統將目標曲線以每10ms一個數據的速度發送至伺服控制器,伺服控制器同時接收旋轉變壓器反饋的電機數據。由此形成閉環控制,得到電機控制指令,驅動伺服電機完成造波任務。在造波過程中,圖形曲線顯示模塊將實時顯示由A/D轉換卡輸入得到的實際波高數據以及旋轉變壓器得到的造波板實際運動軌跡。采樣模塊將對所需要的實際浪高數據進行記錄保存。
⑤極限位置保護模塊。判斷造波板是否位于極限位置。若位于極限位置,則發出報警,停止造波,并可根據提示操作,使造波板向該極限相反方向復位。
人機操作界面功能的實現是通過控制系統循環掃描、功能模塊調用來實現的。規則波造波實現流程如圖3所示。
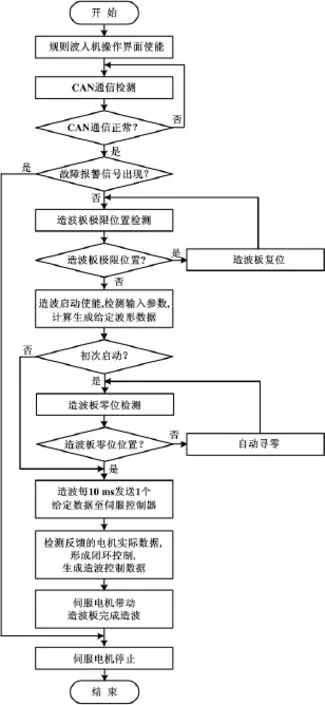
圖3 規則波造波實現流程圖Fig.3 Flowchart ofwavemaking for regular wave
規則波測控系統人機操作界面使能后,首先執行CAN總線通信模塊,人機界面與伺服控制器之間以CAN總線方式進行數據交換。調用狀態監控模塊,控制系統以100 Hz的頻率循環掃描檢測CAN總線通信狀態、故障報警信號、造波板極限位置信號、造波板零位信號、控制器準備狀態信號、運行狀態信號等。若出現故障報警信號,則及時停機,待故障清除后系統方可運行。若造波板位于極限位置,則調用極限位置保護模塊,執行其復位功能,使造波板向極限位置相反方向運行。
執行規則波測控模塊,輸入規則波參數,待造波啟動使能后,調用自動尋零模塊。造波板如為初次啟動,則判斷其是否位于造波零位,如果不是零位,則自動尋零。若找到零位,系統自動記錄并退出尋零模塊,進入規則波測控模塊繼續執行造波命令,將規則波目標數據循環下發至伺服控制器,控制造波;若未找到造波零位,則發出報警信號,造波停止。造波過程中,可執行圖形曲線顯示模塊,實時查看造波板運行軌跡曲線與實際波高曲線;可執行規則波采樣模塊,對所需要的波高數據進行記錄保存。
5 系統應用及數據分析
本文中所研制的造波機測控系統已成功應用于多套水槽推板造波機中。在水深1 m的水槽試驗中,部分實測波形如圖4所示。
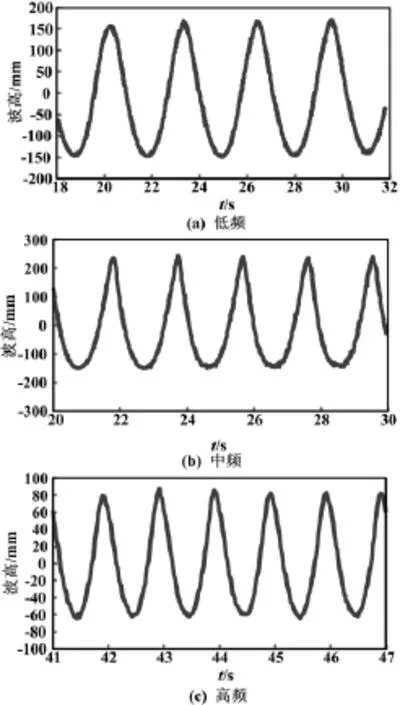
圖4 實測波形圖Fig.4 Themeasured waves
圖4分別選取了該造波機在頻率f=0.324 Hz、造波板行程S=500 mm時的低頻工況,頻率f=0.515 Hz、造波板行程S=380mm時的中頻工況,頻率f=1.0 Hz、造波板行程S=70mm時的高頻工況。
通過對圖4波形曲線的讀取和分析,得到不同頻率下實測波浪的相關分析數據,如表1所示。
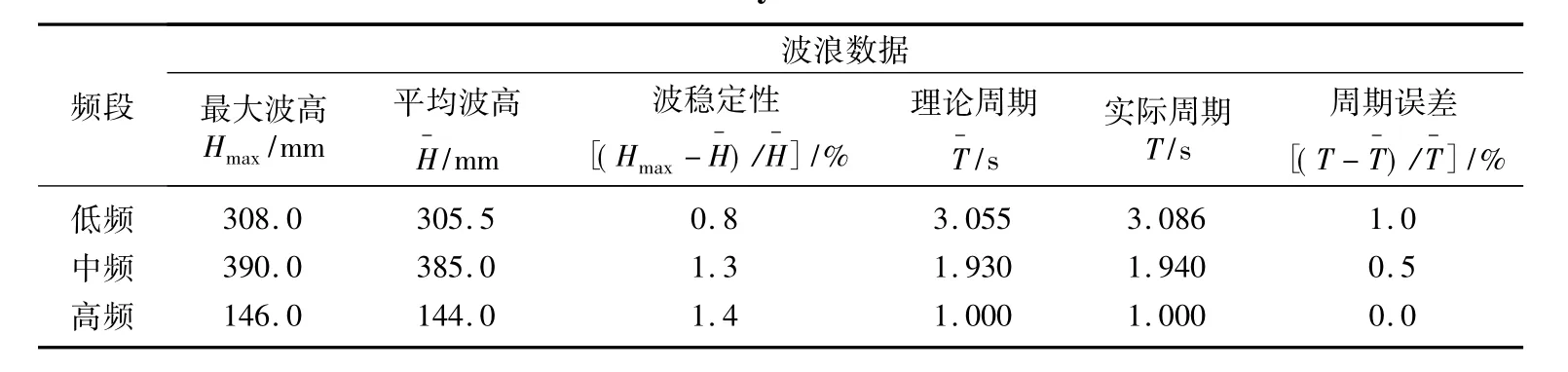
表1 實測波浪相關分析數據Tab.1 The relevant analytical data ofmeasured wave
從表1可以看出,在1m水深時,該測控系統造波機規則波最大波高可達390mm,波高穩定性≤2%,波周期誤差≤2%。
6 結束語
本造波機測控系統采用CAN總線通信,保證了數據傳輸的實時性與可靠性;利用交流伺服控制器實現了位置閉環控制模式,保證了造波定位的精確性;設計了人機操作界面,實現了操作的靈活與簡便;優化了自動尋零、極限保護等功能,保證了系統運行的快捷與安全。同時,在設備制動、系統抗干擾等方面增加相應措施,保證了設備的安全性與可靠性。經實際應用驗證,本測控系統應用于試驗水槽推板造波機后具有優越的造波性能,波浪高度高、穩定性好、精度高。
[2]楊森華,孔翔金.造波機及造波技術原理[C]//海洋工程試驗設備論文集,1996:38-40.
[3]馬玉麟,孫永明,王帥軍.水池造波技術及發展概況[J].科技資訊,2012(10):55-56.
[4]張群,王靜,楊洪齊,等.伺服電機驅動式無反射不規則波造波機系統[J].中國水運,2012,12(6):111-112.
[5]朱莉,黃晶華,趙麗君.水槽造波機的參數確定及結構設計[J].現代電力,2011,28(4):44-48.
[6]張亞群.造波機的控制及其實現[D].武漢:武漢理工大學,2007.
[7]徐旭.電動造波機交流伺服控制系統的研究[D].天津:天津大學,2007.
[8]張瑞波,王收軍,朱國良.伺服電機驅動式水槽造波機系統設計[J].機械設計,2007,24(10):40-42.
[9]李俊,陳剛,楊建民,等.海洋工程試驗中多單元造波機波浪模擬方法[J].海洋工程,2011,29(3):37-42.
[10]張曉麗,楊健,關海波.波浪水槽模擬波浪技術的研究[J].海洋技術,2008,27(1):129-131.
[1]楊森華.造波機理論計算方法[C]//海洋工程試驗設備論文集,1996:1-3.
Development and Application of the Measuring and Controlling System Based on CAN Bus for Wave Making Machine
In order to accurately emulate the influence ofwave on objects,thewavemakingmachine based on CAN bus has been designed and developed.The system consists of IPC,AC servo controller,and servomotor,etc.,and adopts CAN bus communication.The electric control cabinet is designed for hardware,and man-machine interface is designed in software.The position closed loop control is used in wave making section;and the open loop control is used in wavemeasuring section.The practical application shows that the system possesses powerful control and measurement capability,the wave data measured are highly stable and with high accuracy.The superior measuring and controlling performance and wavemaking performance of the system are verified.
CAN bus AC servo Wavemakingmachine Measuring and controlling system Man-machine interface
TP23
A
修改稿收到日期:2013-12-24。
戚磊(1982-),男,2008年畢業于哈爾濱工程大學控制理論與控制工程專業,獲碩士學位,工程師;主要從事伺服控制、電氣傳動方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32