高職實(shí)訓(xùn)教學(xué)用智能小車(chē)設(shè)計(jì)
2014-10-27 08:16:12盧貺宋霞
盧 貺 宋 霞
(1.武漢軟件工程職業(yè)學(xué)院,湖北武漢 430205;2.武漢職業(yè)技術(shù)學(xué)院,湖北武漢 430074)
高職院校的電氣控制、自動(dòng)原理、單片機(jī)原理、嵌入式系統(tǒng)等課程的實(shí)訓(xùn)教學(xué)中,經(jīng)常用到智能小車(chē)作為教學(xué)的案例和平臺(tái)。智能小車(chē)以其生動(dòng)、典型、學(xué)習(xí)形式喜聞樂(lè)見(jiàn)、涉及知識(shí)面廣等特點(diǎn),受到教師和學(xué)生的歡迎。本文介紹基于STC單片機(jī)的智能小車(chē),該小車(chē)主要由主控制器、車(chē)體、驅(qū)動(dòng)電機(jī)、避障電路、尋跡電路和輔助電路等組成,各部分均采用節(jié)能設(shè)計(jì),整機(jī)功耗低[1]。
1 硬件設(shè)計(jì)
1.1 主控制器介紹
本設(shè)計(jì)采用STC12C5A60S2單片機(jī)作為主控制器,該單片機(jī)是宏晶科技生產(chǎn)的單時(shí)鐘/機(jī)器周期(1T)的單片機(jī),是高速/低功耗/超強(qiáng)抗干擾的新一代8051單片機(jī),指令代碼完全兼容傳統(tǒng)8051,但指令運(yùn)行速度快。內(nèi)部集成MAX810專(zhuān)用復(fù)位電路,2路PWM,8路高速10位A/D轉(zhuǎn)換(250K/S),適合電機(jī)控制和強(qiáng)干擾場(chǎng)合。其片內(nèi)程序存儲(chǔ)器為FLASH工藝,容量為60K,片上還集成有1280字節(jié)的RAM。單片機(jī)內(nèi)部結(jié)構(gòu)還包括SPI接口、定時(shí)/計(jì)數(shù)器、PCA、UART接口、I/O口、看門(mén)狗及片內(nèi)R/C振蕩器和外部晶振電路等模塊。
本設(shè)計(jì)的主要外圍電路模塊有:避障檢測(cè)電路、尋跡檢測(cè)電路、電機(jī)控制電路等,具體的硬件電路結(jié)構(gòu)框圖如圖1所示。

圖1 硬件電路結(jié)構(gòu)框圖
1.2 尋跡檢測(cè)電路
智能小車(chē)的運(yùn)行軌跡是沿著白底上黑線(xiàn)運(yùn)動(dòng),因此設(shè)計(jì)的尋跡檢測(cè)電路即是黑白色識(shí)別器,采用的是紅外發(fā)射、接收對(duì)管組成的光電傳感器模塊。采用紅外發(fā)射管代替可見(jiàn)光管,可以降低背景光干擾。光電管接收反射的紅外信號(hào),紅外發(fā)射接收原理如圖2所示。

圖2 紅外發(fā)射接收原理
尋跡檢測(cè)電路工作原理是,發(fā)射管激勵(lì)電信號(hào),發(fā)射管發(fā)出的光強(qiáng)基本恒定,而白底和黑線(xiàn)對(duì)光的發(fā)射效果不同,接收管表現(xiàn)的吸收效果就不同,使接收管反向電流有較大變化,導(dǎo)致與其串聯(lián)的電阻兩端電壓出現(xiàn)明顯變化。將該電壓接于單片機(jī)的A/D轉(zhuǎn)換輸入端,經(jīng)片內(nèi)A/D轉(zhuǎn)換器后變成數(shù)字量,將黑白兩狀態(tài)變?yōu)榛叶茸R(shí)別,優(yōu)點(diǎn)是電路簡(jiǎn)單,識(shí)別分辨率高[3]。一路的尋跡檢測(cè)電路如圖3所示。
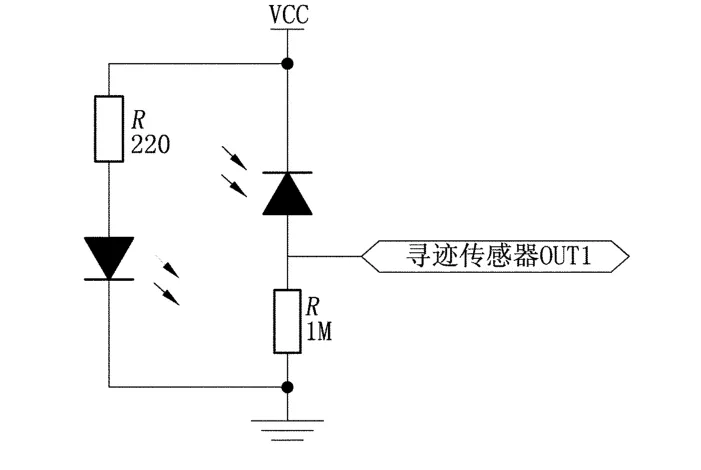
圖3 尋跡檢測(cè)電路
實(shí)際使用中將三個(gè)一路尋跡檢測(cè)電路安裝在一起,之間的間隔約為黑線(xiàn)的寬度,輸出的信號(hào)為尋跡傳感器OUT1、OUT2、OUT3,從而達(dá)到最佳的尋跡效果。
1.3 電機(jī)控制電路
電機(jī)控制電路一般采用H橋式驅(qū)動(dòng)電路,由于兩個(gè)電機(jī)是獨(dú)立控制,所以需要兩路H橋式驅(qū)動(dòng)電路,如圖4所示。
控制電機(jī)的 MOTOR1A、MOTOR1B、MOTOR2A、MOTOR2B四路信號(hào),以及為電機(jī)調(diào)速的控制端口SPEED1、SPEED2兩路信號(hào),都與單片機(jī)的I/O端口相連,受單片機(jī)程序控制。
MOTOR1A和MOTOR1B控制一個(gè)H橋,該H橋輸出J3接左輪電機(jī),所以MOTOR1A、MOTOR1B控制左側(cè)小車(chē)電機(jī)的前進(jìn)和后退;MOTOR2A和MOTOR2B控制另一個(gè)H橋,該H橋輸出J5接右輪電機(jī),所以MOTOR2A、MOTOR2B控制右側(cè)小車(chē)電機(jī)的前進(jìn)和后退。改變這四路控制信號(hào)就可以讓小車(chē)完成左轉(zhuǎn)、右轉(zhuǎn)、前進(jìn)、后退、原地轉(zhuǎn)圈等。
為了方便控制小車(chē)的運(yùn)行速度和車(chē)輪的差動(dòng),設(shè)計(jì)了電機(jī)調(diào)速電路,實(shí)現(xiàn)了DAC模擬電壓控制調(diào)速和PWM調(diào)速兩種方式[4]。
DAC模擬電壓控制調(diào)速。以MOTOR1電路為例說(shuō)明,當(dāng)J4斷開(kāi)時(shí),改變?nèi)龢O管Q7基極的電壓,即改變SPEED1輸入電壓,就能改變?nèi)龢O管Q7的發(fā)射極電流,達(dá)到改變電機(jī)轉(zhuǎn)速的目的。通過(guò)DAC控制SPEED1的電壓變化,來(lái)實(shí)現(xiàn)電機(jī)的無(wú)極調(diào)速。
PWM調(diào)速控制。如果SPEED1是高電平,Q7就出現(xiàn)導(dǎo)通狀態(tài),電機(jī)工作;如果是低電平,Q7截止,電機(jī)也停止工作,通過(guò)改變PWM占空比就可以起到電機(jī)調(diào)速的效果。以上兩種調(diào)速方法控制效果基本一致,如果不需要調(diào)速,可以用短路帽將J4和J5端口短接。
1.4 避障模塊
智能小車(chē)通過(guò)紅外傳感器采集路況信息,通過(guò)對(duì)檢測(cè)信息的分析,自動(dòng)控制轉(zhuǎn)向電機(jī),改變行駛路徑,繞過(guò)障礙物,從而實(shí)現(xiàn)避障功能。
紅外傳感器的工作原理是根據(jù)投光器(紅外發(fā)光二極管)發(fā)出的光束,被障礙物遮擋或部分反射,受光器(紅外光敏二極管)根據(jù)情況作出判斷反應(yīng),利用被檢測(cè)物體對(duì)紅外光束的遮光或反射,由同步回路選通而檢測(cè)物體的有無(wú),其物體不限于金屬,對(duì)所有能反射光線(xiàn)的物體均能檢測(cè)。本設(shè)計(jì)中采用紅外傳感器為NPN常開(kāi)型反射式傳感器,工作電壓為5V,工作電流100mA。有效測(cè)量距離為80cm,易于裝配。該傳感器為開(kāi)關(guān)量傳感器,輸出的為1、0開(kāi)關(guān)量信號(hào),和單片機(jī)的INT1端直接連接,當(dāng)無(wú)障礙物時(shí),輸出高電平;當(dāng)有障礙物時(shí),輸出低電平,觸發(fā)中斷,小車(chē)隨即做出避障動(dòng)作,避免碰到障礙物。
1.5 智能小車(chē)結(jié)構(gòu)
智能小車(chē)設(shè)計(jì)了兩個(gè)驅(qū)動(dòng)輪和一個(gè)萬(wàn)向輪的三輪結(jié)構(gòu)。左、右輪獨(dú)立控制,可以使小車(chē)同時(shí)前轉(zhuǎn)、后轉(zhuǎn),反向旋轉(zhuǎn)或一側(cè)轉(zhuǎn)動(dòng)一側(cè)停止,可以完成原地轉(zhuǎn)彎,旋轉(zhuǎn)等動(dòng)作。同時(shí)選擇橡膠輪,摩擦力大,避免了小車(chē)打滑現(xiàn)象。由于小車(chē)可以靈活地進(jìn)行原地轉(zhuǎn)圈控制,適合沿曲折路線(xiàn)前進(jìn),在走迷宮等應(yīng)用時(shí)有很強(qiáng)的優(yōu)勢(shì)。智能小車(chē)采用材質(zhì)為FR-4的電路板作為車(chē)體,該電路版上盡可能多地留出了可以焊接器件的焊孔,學(xué)生可以直接把顯示電路、通信電路、遙控電路等擴(kuò)展部分焊接到車(chē)體上,不需要再額外增加電路板,方面使用。
選用直流減速電機(jī),該種電機(jī)體積小,裝配方便,使用簡(jiǎn)單,重量輕。由于其內(nèi)部由高速電動(dòng)機(jī)提供原始動(dòng)力,帶動(dòng)減速齒輪組,可以產(chǎn)生很大的扭力。選用的直流電機(jī)減速比為48:1,減速后電機(jī)的轉(zhuǎn)速為120r/min,車(chē)輪直徑為7.2cm,因此小車(chē)的最大速度可達(dá)0.452m/s。
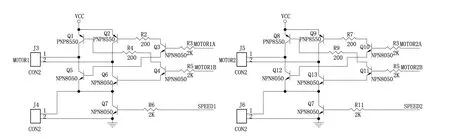
圖4 電機(jī)控制電路圖
2 軟件設(shè)計(jì)
2.1 主程序框圖
軟件設(shè)計(jì)采用模塊化的編程思想,使用Keil4軟件開(kāi)發(fā)平臺(tái)編寫(xiě)、調(diào)試軟件[5],主程序框圖見(jiàn)圖5。

圖5 主程序框圖
2.2 尋跡程序設(shè)計(jì)
智能小車(chē)進(jìn)入尋跡狀態(tài)后,即開(kāi)始不停地掃描與尋跡檢測(cè)電路相連接的單片機(jī)I/O口,一旦檢測(cè)到某個(gè)I/O口有信號(hào),即進(jìn)入判斷處理程序,先確定尋跡檢測(cè)電路中的三路信號(hào)中哪一路檢測(cè)到黑線(xiàn),如果左邊傳感器探測(cè)到黑線(xiàn),即小車(chē)左半部分壓到黑線(xiàn),車(chē)身向右偏出了軌跡,此時(shí)應(yīng)使小車(chē)向左轉(zhuǎn);如果右邊傳感器探測(cè)到黑線(xiàn),即車(chē)身右半部壓住黑線(xiàn),小車(chē)向左偏出了軌跡,則應(yīng)使小車(chē)向右轉(zhuǎn)。在經(jīng)過(guò)方向調(diào)整后,小車(chē)再繼續(xù)向前行走,并繼續(xù)探測(cè)黑線(xiàn),并重復(fù)上述檢測(cè)動(dòng)作。尋跡程序框圖如圖6所示。
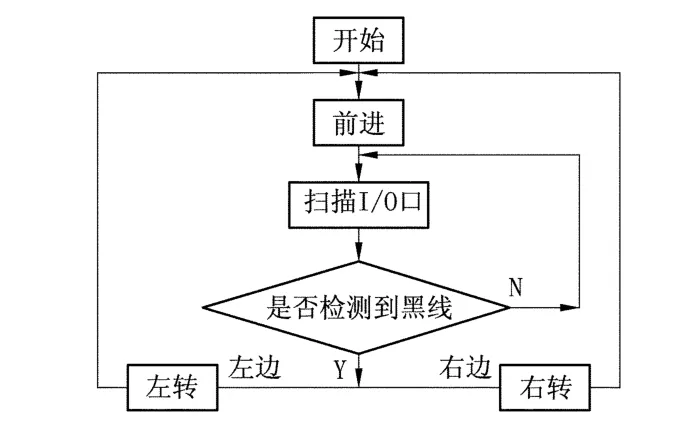
圖6 尋跡程序框圖
2.3 避障程序設(shè)計(jì)
智能小車(chē)在運(yùn)行過(guò)程中,如果檢測(cè)到運(yùn)行前方出現(xiàn)了障礙物,需要能靈活躲避,避開(kāi)障礙物后,再回到尋跡檢測(cè)狀態(tài)。避障程序框圖如圖7所示。

圖7 避障程序框圖
3 結(jié) 語(yǔ)
本文介紹了基于STC單片機(jī)智能小車(chē)的硬件和軟件設(shè)計(jì),由于采用模塊化設(shè)計(jì)思想,可以擴(kuò)展許多功能。本設(shè)計(jì)經(jīng)過(guò)安裝、調(diào)試,實(shí)現(xiàn)了智能小車(chē)的避障、調(diào)速、前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)、尋跡等功能。
(1)自動(dòng)沿白底黑線(xiàn)軌跡行駛小車(chē),在行駛過(guò)程中,能夠自動(dòng)檢測(cè)預(yù)先設(shè)好的黑線(xiàn)軌道,實(shí)現(xiàn)直道和弧形軌道的前進(jìn)。若有偏離,能夠自動(dòng)糾正,返回到預(yù)設(shè)軌道上。
(2)當(dāng)小車(chē)探測(cè)到前進(jìn)方向的障礙物時(shí),能自動(dòng)避開(kāi)障礙物,從無(wú)障礙區(qū)通過(guò)。小車(chē)通過(guò)障礙區(qū)后,能夠回到自動(dòng)尋跡狀態(tài)。
1 田拓.基于AT89C51單片機(jī)智能小車(chē)的設(shè)計(jì)[J].寧夏工程技術(shù),2005(4):334-336
2 趙振德.多功能遙控智能小車(chē)的制作[J].電子制作,2011(4):12-16
3 王慶有.光電傳感器應(yīng)用技術(shù)[M].北京:機(jī)械工業(yè)出版社,2008:58-71
4 曹衛(wèi)華.一種尋線(xiàn)行走機(jī)器人設(shè)計(jì)與實(shí)現(xiàn)[J].計(jì)算機(jī)測(cè)量與控制,2006(14):4-6
5 黃智偉.全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽系統(tǒng)設(shè)計(jì)[M].北京:北京航空航天大學(xué)出版社,2009:91-112
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
 武漢船舶職業(yè)技術(shù)學(xué)院學(xué)報(bào)2014年3期
武漢船舶職業(yè)技術(shù)學(xué)院學(xué)報(bào)2014年3期
- 武漢船舶職業(yè)技術(shù)學(xué)院學(xué)報(bào)的其它文章
- 搖床軸瓦蓋斷裂的原因分析及解決措施
- 基于虛擬儀器技術(shù)的船舶機(jī)艙監(jiān)測(cè)與報(bào)警系統(tǒng)的研究
- 產(chǎn)業(yè)技術(shù)結(jié)構(gòu)發(fā)展視閾下高職教育層次結(jié)構(gòu)的探究
- 我國(guó)高等職業(yè)教育與基于行業(yè)標(biāo)準(zhǔn)的民航職業(yè)教育改革
- 高職院校專(zhuān)業(yè)課程設(shè)置應(yīng)適應(yīng)區(qū)域經(jīng)濟(jì)發(fā)展需要——以山東半島地區(qū)酒店管理專(zhuān)業(yè)為例
- 校企協(xié)同模式下開(kāi)放性雙師型教師隊(duì)伍建設(shè)機(jī)制探討