三維激光掃描儀在奧運鳥巢中的應用
2014-11-13 06:31:22史俊莉河南工業職業技術學院河南南陽473000
江西建材 2014年15期
■史俊莉 ■河南工業職業技術學院,河南 南陽 473000
三維激光掃描是一種先進的全自動高精度立體掃描技術。是一種非接觸主動測量的方式,能夠快速獲取物體表面采樣點三維空間坐標,并能夠構建三維立體模型。在建筑物測量領域,三維激光掃描測量技術的出現和發展,克服了傳統建筑測量的局限性,并解決了特殊建筑物無法量測的難題。它具有快速、無接觸、實時性強、精度高、主動性強、全數字特征等特點。通過高速激光掃描測量方法,以點云形式獲取建筑物表面的陣列式幾何圖像數據,為建筑物的施工放樣、變形監測提供技術支持,特別是高層建筑和大型建筑工程激光掃描技術是繼GPS技術又一個高科技全新的技術手段。
1 三維激光掃描技術
1.1 三維激光掃描技術的概念
三維激光掃描技術又被稱為實景復制技術,是二十世紀九十年代開始出現的一種新技術,三維激光掃描技術它通過高速激光掃描測量的方法,大面積高分辨率地快速獲取被測對象表面的三維坐標數據。可以快速、大量的采集空間點位信息,從而構建物體的三維立體模型,它突破了傳統的單點測量方法,具有高效率、高精度的獨特優勢。是一項由點測量過渡到面測量的技術革命。
三維激光掃描技術近年來由于它高效率,高精度,易操作等優點被廣泛應用于各個領域,如文物古跡保護、建筑、規劃、土木工程、工廠改造、室內設計、建筑監測、交通事故處理、法律證據收集、災害評估、船舶設計、數字城市、軍事分析等領域。
1.2 三維激光掃描技術原理
三維激光掃描儀的構造主要包括激光測距系統和激光掃描系統,同時也有集成CCD和控制系統以及校正系統,通過兩個同步反射鏡快速而有序的旋轉,將激光脈沖發射體發出的窄束激光脈沖依次掃過被測區域,測量激光脈沖從發出經被測物體表面再返回一起所經過的時間(或相位差)來計算距離,同時掃描控制模塊控制和測量每個脈沖激光的角度,通過測量得到的水平角、垂直角、距離之計算基光點在被測物體上的三維坐標(x、y、z),部分儀器具有內置的數碼相機,可以直接獲得目標物的影像,得到掃描點的顏色信息。反射強度、顏色信息可用于點云數據后續處理,提取實體邊緣位置信息和真彩色紋理信息。三維激光掃描儀根據測距原理可分為脈沖式、相位式。
1.3 三維激光測距儀較其他測繪儀器的優點
(1)無接觸式測量。三維激光掃描儀是一種無接觸的測量方法,古文體,高層建筑、工廠管道,隧道,地形等復雜的領域無法測量已經成為過去式。
(2)高效率。在以往的測量中,用的最多的儀器要數全站儀和GPS,測出一個點的位置信息大約在2-5秒,三維激光測距儀在誕生最初可以達到每秒1000點的測量速度,采用360度全景掃描。脈沖式掃描儀最大速度可達到每秒50000點,相位事可達到每秒120萬個點,這種密集式高效率測點位的方式是以往任何儀器都無法達到的。
(3)高精度。用三維激光掃描儀進行定位,精度可達到毫米級精度,這對服務于精密工程精度也是足夠的。如萊卡的Scanstation2三維激光掃描儀,測量精度為單點4mm,模型1mm,測距范圍在300m,采樣率為50000點/s。
(4)三維立體實景模型。三維激光掃描儀在根據角度和距離求出被測物體的三維坐標后,又利用內置的數碼相機獲得目標物的影像和顏色信息,通過坐標和影像信息可在后期構建被測物體的三維立體實景模型,傳統的測量概念里,所測的數據最終輸出的都是二維結果,例如CAD圖,在逐步數字化的今天,三維取代二維已經是一種趨勢,三維激光掃描儀是在此種趨勢中誕生出來的新技術。
2 三維掃描儀在鳥巢的應用
2.1 工程背景
2005年10月28日,“鳥巢”開始吊裝第一根鋼柱,對于大型鋼結構及裝備的生產和安裝,怎樣使鋼結構組件準確的進行吊裝定位焊接是個難題,對于鳥巢的鋼結構更是如此,它的鋼結構組件狀如樹枝,每個組件的焊口少則五六個,多則十幾個甚至幾十個,而且每個組件的重量輕則數噸,重則幾十噸甚至上百噸。如果按常規方法,應在臺架上按設計要求的姿態焊接組裝,再吊起組件與空中鋼結構體焊接成型。這就存在一個問題,即已經吊裝焊接成型的鋼結構體會受光照、氣溫、風向、重力及自身內應力等因素影響,使預留的空間位置產生變化,且預留空間都分布在幾十米的高空,待觀測點截面又很小,用常規方法觀測難以滿足施工的要求,如果利用三維激光掃描儀這個問題就迎刃而解了,三維激光掃描儀可以在設計前期完成現場基礎數據的搜集;在大部件加工完成后,進行尺寸的掃描檢查;部件在運往安裝現場前,可通過相關應用軟件進行部件間的虛擬裝配,實現虛擬檢查,并可以直接放入安裝場景掃描模型中實現虛擬現場安裝。
2.2 利用三維激光掃描儀安裝鋼結構
掃描之前首先布設高精度的控制點,三維激光掃描儀架在測站點上進行360°×270°視場內進行密集式掃描。
(1)外業掃描。利用萊卡Scanstation2三維激光掃描儀進行掃描鳥巢,得到鳥巢表面的云數據,遇到結構復雜或有遮擋時,應該加密掃描或多站掃描。三維激光掃描儀對鳥巢的掃描影像如下圖1所示。
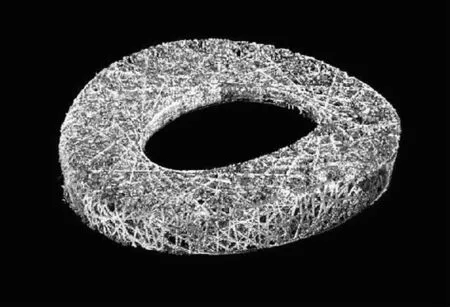
圖1
(2)數據處理:①地物提取。在最初獲得的數據中包含地形數據、建筑數據以及其他地物數據。這時就需要將目標建筑物的數據從眾多數據中提取出來,為后面的數據處理提供依據;②去噪濾波。三維激光掃描儀和目標建筑物之間可能存在著行人、樹木、車輛等,通過掃描后會形成亂點獲空洞等噪聲,去噪濾波就是除去測量噪聲。
(3)建立三維模型。利用三角網模型獲NURBS曲面建模方法進行建模,由于采集的點位雖然密集,但任然是離散型的點位,需建立模型,對數據進行擬合,使離散的點擬合成為連續的曲線,從而建立三維立體模型。
3 小結
三維激光掃描測量技術克服了傳統測量技術的局限性,采用非接觸主動測量方式直接獲取高精度三維數據,能夠對任意物體進行掃描,且沒有白天和黑夜的限制,快速將現實世界的信息轉換成計算機可以處理的數據。它具有掃描速度快、實時性強、精度高、主動性強、全數字特征等特點,可以極大地降低成本,節約時間,而且使用方便。在城市及建筑測量領域,三維激光掃描儀不但可以完成建筑結構的測繪,得到三維建筑模型,并可以實現建筑施工質量監測。通過三維激光掃描儀對建筑掃描形成的點云可以幫助我們完成立面圖繪制(平、立、剖)、三維模型構件、基本尺寸量算等結果。并可以在新建建筑驗收時,對建筑物掃描得到精確詳實的三維模型,從而通過計算或比對完成施工質量檢測,讓傳統的特征點質量檢測轉變為整體檢測。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北方建筑(2021年6期)2021-12-31 03:03:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19