多序列激光陰影成像技術研究及應用
2014-11-15 09:32:30謝愛民柯發偉
實驗流體力學 2014年4期
關鍵詞:系統
謝愛民,黃 潔,宋 強,鄭 蕾,柯發偉,柳 森
(中國空氣動力研究與發展中心,四川 綿陽 621000)
0 引 言
隨著人類探索太空領域活動的日益增多,解體航天器產生了大量速度高達幾km/s到幾十km/s的碎片,這些超高速度飛行的空間碎片以及太空中速度極高的隕石(類似碎片)對航天器以及宇航員的安全構成了嚴重威脅,因此有必要開展這些空間碎片對航天器破壞程度的試驗研究[1-2]。
在地面上開展大量撞擊速度大于5km/s的超高速碰撞試驗是研究航天器抗空間碎片撞擊性能的主要方法之一。在這樣的撞擊條件下,彈丸和靶材會破碎甚至液化、氣化,形成碎片云。碎片云顆粒的大小、空間分布和發展變化等直接反映了材料和結構在極高沖擊壓力下的動態響應特性,是改進防護材料和結構設計,提升航天器防護能力的重要依據。因此,對碰撞產生的碎片云發展過程進行記錄分析是其中重要的試驗研究內容。試驗中,通常用超高速攝影儀器或X光照相系統完整清晰地記錄彈丸撞擊靶材和碎片云形成過程。為了使每幅圖像不會因為記錄目標的高速運動造成模糊,每幅圖像的記錄時間必須足夠短。在幾十微秒的撞擊過程中要獲得多幅圖像,超高速攝影儀器的幅頻至少應達到100萬幅/s。
目前,美國、德國和日本等國家為了對高速或超高速目標變化過程進行清晰成像,發展了高速和超高速數字攝影機,這類攝影機主要包括2類:第1類使用單CCD的超高速數字攝影機,這類數字攝影機受圖像存儲或轉移速度限制,在較高的幀頻時圖像分辨率將大大下降,甚至因為分辨率太低而失去了使用價值;第2類超高速攝影機使用多通道CCD,利用微通道板(MCP)技術,由上千伏高壓驅動微通道板在ns量級的時間內實現光束選通和像增強,這類超高速數字攝影機通過調節序列間隔時間和微通道板的選通時間,幅頻可以達到上億甚至百億幅/秒,但目前圖像的像素也都不超過一百萬。如國外研制的一種型號為HSFC的超高速數字相機,可以在1次試驗中記錄4幅或8幅圖像,每幅圖像的曝光時間最小為10ns,圖像像素分辨率為1024×1024。圖1為利用該相機獲得的碎片云發展變化過程圖像(圖像來源于該相機的宣傳冊)。試驗中,對測試區域進行了高強度光源照明,在具有強烈自發光區域出現了過度曝光現象[3-7]。
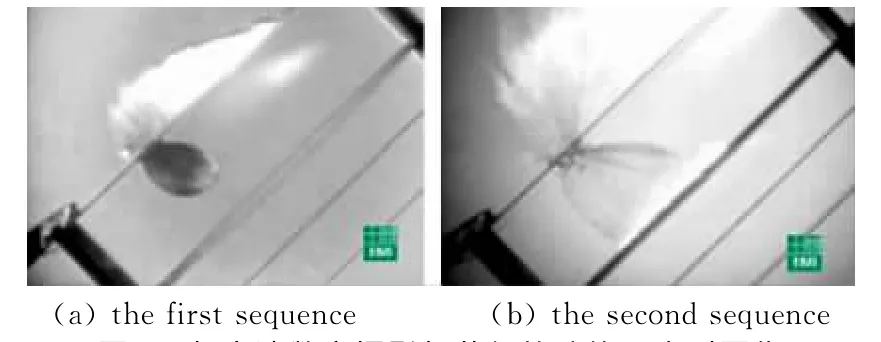
圖1 超高速數字攝影機獲得的碎片云序列圖像Fig.1 Sequence images of debris cloud gotten by hypervelocity digital camera
為了進行超高速碰撞現象研究,中國空氣動力研究與發展中心超高速所運用單幅激光陰影照相技術[2],在解決了系列衍射和干涉效應等影響后成功地獲得了超高速碰撞過程中清晰的碎片云圖像。在該技術基礎上,運用多光源空間分離技術等先后實現了超高速碰撞過程的2序列、4序列和8序列激光陰影照相,可以在一次試驗中清晰獲得微秒級變化過程多個不同時刻的陰影圖像。
1 單幅激光陰影成像系統
單幅激光陰影成像系統是超高速多序列激光陰影成像系統發展的基礎,單幅激光陰影成像系統如圖2所示。該系統主要由光源系統、準直系統和成像系統組成。光源系統發出的激光束經擴束后由準直系統轉為平行光束,平行光束穿過測試區域后由成像系統把測試目標的陰影圖像記錄在膠片或者CCD上。圖中準直系統的準直透鏡口徑為200mm,其口徑大小確定了整個系統的測試視場。因為激光光源的脈寬小于10ns,盡管測試區域的測試目標速度達到5km/s以上,在陰影圖像上不會因為目標的運動出現明顯的模糊現象。圖中光源和成像物鏡采用對稱型結構,可以最大限度消除系統存在的像差。
系統采用等待式成像方式,在試驗前相機打開,并處于曝光狀態。當彈丸撞擊靶材某個瞬間時激光光源閃光,則測試區域的外形輪廓就被記錄在膠片或者CCD上。激光光源的閃光信號由固體激光彈丸探測控制器提供,彈丸撞擊靶材瞬間的時間信號由光輻射探測器提供。
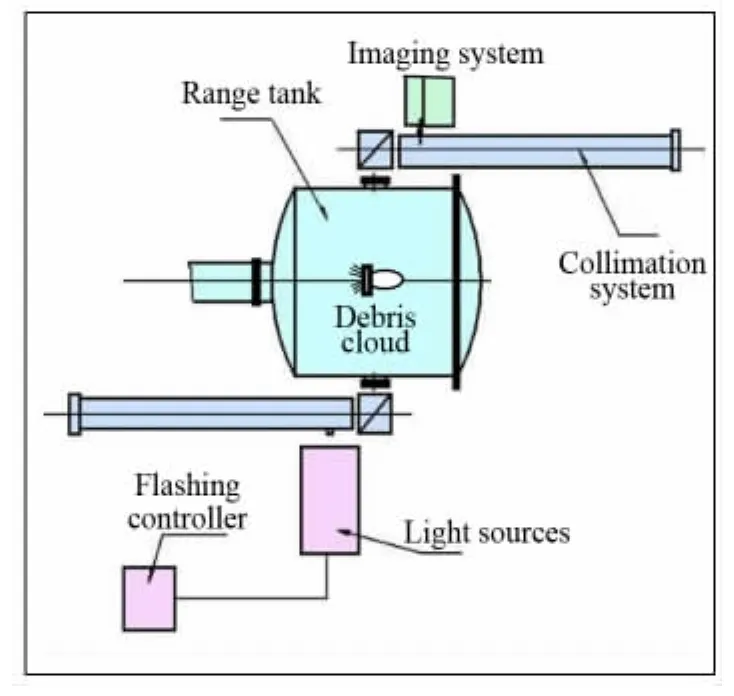
圖2 激光陰影成像系統布置圖Fig.2 Structure of laser shadowgraph system
根據陰影成像特點,該技術也適合對流場密度變化進行記錄,對不同區域聚焦可以實現不同靈敏度的流場顯示。當成像物鏡對測試區域中心聚焦時,獲得的目標像最清晰,但陰影儀的靈敏度設置為最小。
由于激光光源的單色性,光路中使用的光學器件出現瑕疵時可能會帶來衍射環,如果光學器件表面膜層不良引起光束來回反射,則在成像區域可能會形成干涉條紋。同時碰撞瞬間會產生強烈的自發光(見圖1),如果不進行消除會對陰影圖像產生干擾。通過優化光路設計技術、補償式濾光技術等都可以得到解決[8],最終該系統清晰獲得了彈丸在正撞擊和斜撞擊靶材時的碎片云激光陰影圖像,如圖3所示。圖3(a)是彈丸以V=5.52km/s正碰靶材后15.1μs時的碎片云激光陰影圖像;圖3(b)是彈丸以V=6.02km/s斜碰靶材后8.6μs時的碎片云激光陰影圖像。從圖中可清晰看見碎片云在撞擊瞬間的外形輪廓,但由于該系統在試驗中只能獲得一幅陰影圖像,不能對碎片云的形成變化過程進行清晰描述。為了滿足超高速碰撞試驗研究需求,有必要發展能夠對碰撞現象過程的碎片云進行多幅圖像記錄的序列成像技術,而多序列激光陰影成像技術就是在基于單幅激光陰影成像技術基礎上不斷得到發展的。
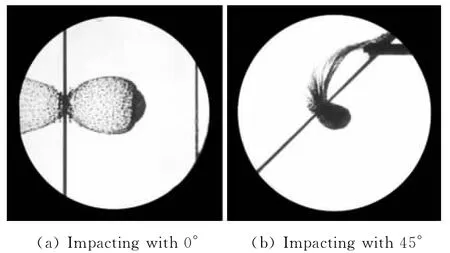
圖3 單幅激光陰影成像系統獲得的不同狀態碎片云陰影圖像Fig.3 Shadowgraph images of debris cloud at different state gotten by single laser shadowgraph system
2 多序列激光陰影成像技術
多序列激光陰影成像技術是在上述單幅激光陰影成像技術基礎上增加多套成像光路,實現的主要指標為:一次試驗獲得2~8幅陰影圖像、每幅圖像的曝光時間小于10ns、序列間隔最小1μs以及圖像像素大于600萬。
2.1 超高速瞬態現象序列成像基本要求
對于某一測試區域,超高速目標現象發生的時間較短,通常只有幾百μs甚至更低,而目標的運行速度達到了幾km/s。因此,為了對目標變化過程清晰成像,通過多序列成像技術獲得的每幅圖像曝光時間必須很短,在圖像上不能明顯出現測試目標的拖影現象。
為了實現不同序列時刻能夠對同一測試區域成像,則其成像光路必須相同或相似,而且不同時刻獲得的圖像需要在空間上進行分開。另外,為了滿足不同測試需要,不同序列的間隔時間可調。
2.2 多序列激光陰影成像采用的關鍵技術
在滿足上述要求前提下,通過解決下面的關鍵技術實現了多序列激光陰影成像。
(1)多光源空間分離技術
該技術主要原理為:在單幅激光陰影照相(見圖2)基礎上,增加多套光路,每套光路獨立通過測試區域及不同的成像系統進行成像;同時要求在測試區域的光束幾乎重合,成像系統獲得的測試區域圖像分別記錄在不同的感光介質上,其光路布置如圖4所示(圖中只畫出了兩個序列的光路)。圖4中多套激光光源光束擴束后的光斑直徑應大于圖中的準直鏡直徑。為了光束在通過球面反射鏡后通過成像系統中的小孔時能夠把多束光進行分開,激光通過擴束的匯聚點光斑相距可設置為0.8~1mm,則光束通過準直鏡后的光斑也相距為0.8~1mm。當匯聚點光斑相距為1mm時,通過計算可以得到兩束光在測試區域的重合度優于99%,因此兩套成像系統基本上可以對同一測試區域進行成像。通過這樣的分光方式,序列數目達到8個時的測試區域重合度可以達到95%。
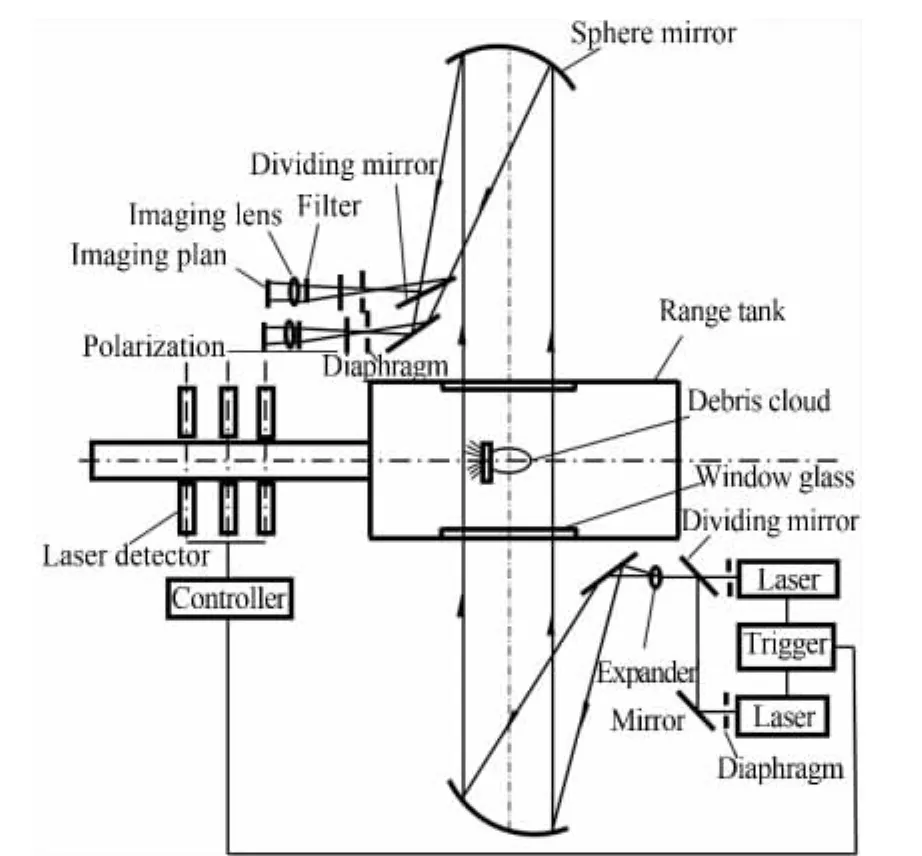
圖4 多序列激光陰影成像系統光路布置圖Fig.4 Optical diagram of multi sequences laser shadowgraph system
(2)偏振分光技術
根據激光是偏振光原理,可以通過偏振片消除其它不需要的光束,一方面可以降低上述多光源空間分離角度,另一方面也可以消除部分雜光而提高信噪比。當緊鄰的兩光束偏振方向角度越大,則偏振分光的效果更好,因此需要在激光光源的出口處放置改變光束偏振方向的波片。對該技術的進一步介紹可參考文獻[4]。
如果只利用多光源空間分離技術,則測試區域的重合度會降低,而只利用偏振分光技術則不能很好地進行分光。通過把偏振分光和多光源空間分離技術相結合,不僅有利于雜光的消除,提高成像的清晰度,同時,在序列數目達到8個時不同序列成像區域的重合度可以提高到97%,幾乎是對同一區域成像。
(3)光束角放大技術
不同的平行光束通過圖2中準直系統后會在不同的位置形成不同的焦斑,測試區域的像面就在焦斑不遠處。但因為受空間的限制,不能在該位置放置太多的成像物鏡。為了實現更多序列的激光陰影照相,需要對空間分離的角度通過光路進行放大。光束角放大采用的主要方法是在成像系統中使光束形成2次實焦點,并放大各個焦點相互之間的距離。如圖5所示,通過球面反射鏡后形成第1次實焦點,通過角度放大物鏡后在成像面前形成第2次實焦點,在第2次實焦點處放置小孔光闌。
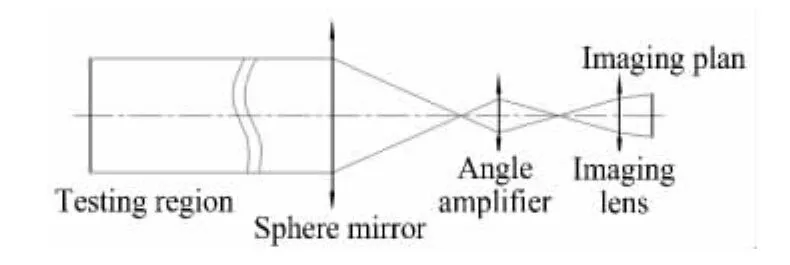
圖5 光束角放大示意圖Fig.5 Structure of light angle magnification
采用光束角放大系統,不僅可以在成像系統區域放置多套成像系統,而且更容易實現多光束的空間分離。
(4)補償濾光技術
在超高速碰撞瞬間,溫度超過了2000K,對測試區域成像時強烈自發光會掩蓋真實的信息。由圖1可以看出,在碰撞瞬間強烈的自發光會掩蓋撞擊靶材附近的碎片云真實信息。在多序列激光陰影成像系統中,如果對這些自發光不進行消除,則一樣不能獲得清晰的序列圖像。
由于系統使用了激光光源,可以在成像物鏡前使用窄帶濾光片,以消除自發光,如圖6(a)所示。通過實驗證明,僅僅在成像物鏡前放置濾光片,光束在物鏡和濾光片之間來回反射,在圖像中會產生類似于多光束干涉條紋,如圖6(b)所示。當濾光片傾斜放置時可以消除干涉條紋,但會造成光束的不均勻,因此需要在濾光片前放置具有不同區域不同衰減功能的補償器(見圖6(c)),使成像光斑比較均勻。
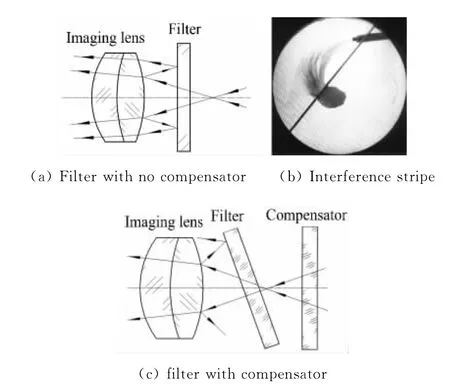
圖6 消除自發光的濾光示意圖Fig.6 Schematic of eliminatingspontaneous light
3 多序列激光陰影成像系統的建立及運用
根據上述多序列激光陰影成像原理,首先在碰撞靶上建立了兩序列激光陰影照相系統,獲得了彈丸在不同角度撞擊靶材時的碎片云陰影圖像;每幅圖像曝光時間約10ns,序列間隔時間最小為1μs,利用膠片作為圖像接收介質。在此基礎上,結合光束角放大技術,進一步發展了4序列激光陰影成像系統,其光源參數及序列間隔時間同上,但圖像是采用像素為1000萬的CCD作為接收介質,獲得的圖像可見文獻[9]。
隨著碰撞試驗研究的發展,一次試驗獲得4幅激光陰影圖像滿足不了要求。為此,在4序列激光陰影成像系統基礎上,發展了8序列激光陰影成像系統。通過對光路結構優化,進一步解決了多個光學器件在空間上的布置難題;同時通過光學器件參數的優化選擇(如表面鍍激光膜層等),基本上解決了雜光的干擾。該系統的發展成功實現了一次試驗中獲得8幅清晰激光陰影圖像,基本上滿足了超高速碰撞試驗中對彈丸姿態及碎片云發展變化過程的記錄需求。
圖7為光源系統實物圖,由于采用多套獨立光源組裝完成,占地面積達到了2m2,體積顯得過于龐大;圖8為光源系統中的擴束系統外觀圖。

圖7 光源系統Fig.7 Light sources system
圖8 擴束系統Fig.8 Expanding system
圖9為通過8序列激光陰影成像系統在超高速碰撞靶上獲得的柱狀彈丸撞擊靶材的陰影圖像,圖中彈丸長度為16mm,直徑為7.6mm,靶材為厚度2mm的鋁板,序列間隔時間為7μs。根據圖9(a)中第1和第2幅圖像可以得出彈丸在飛行方向的移動量約20.7mm,由于兩幅圖像時間間隔為7μs,從而算出彈丸的平均速度Vab=2.74km/s,其誤差來源主要包括序列間隔時間以及圖像的空間分辨率(目前序列間隔時間誤差為10ns,空間分辨率為0.15mm)。
在另一種 Whipple屏結構碰撞試驗研究中,獲得了球形彈丸撞擊靶材的序列陰影圖像,如圖9b所示。該試驗參數為:彈丸速度5.07km/s,彈丸直徑4.75mm,靶板厚2.0mm,靶材為鋁,每相鄰圖像的間隔時間都為3μs。通過圖像處理分析,可以得到碎片云在不同時刻沿彈丸飛行方向的空間位移量,不同時刻碎片云頭部特征點寬度大小。
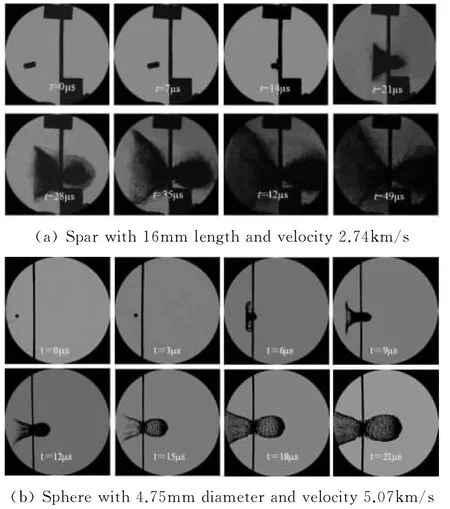
圖9 不同條件下獲得的序列激光陰影圖像Fig.9 Images of sequence laser shadowgraph gotten at different condition
4 結 論
在多序列激光陰影成像技術基礎上發展了多序列成像裝置,并對超高速碰撞彈丸過程進行了測試,對裝置的調試及應用測試結果表明:
(1)成像裝置中每一塊光學器件的質量都將會影響成像背景的均勻性,特別是擴束系統中擴束鏡的任何瑕疵都可能在圖像中產生大量衍射條紋;
(2)光路調試中需要結合偏振分光裝置不斷調整每一個序列光路的偏振方向,以盡量降低不同序列光路的相互干擾;
(3)多序列激光陰影成像技術的發展基本滿足超高速碰撞的彈丸姿態和碎片云測量,并為超高速瞬態測量及流場結構顯示提供了一種新的可視化測量手段。
[1]林木森,龐寶君,龔海鵬,等.球形彈丸超高速正撞擊 Whipple防護結構損傷分析.[J]宇航學報,2009,30(4):1686-1692.Lin Musen,Pang Baojun,Gong Haipeng,et al.Damage of 5A06whipple shield caused by hypervelocity impact of Al2017 sphere[J].Journal of Astronautics,2009,30(4):1686-1692.
[2]遲潤強,龐寶君,何茂堅,等.球形彈丸超高速正撞擊薄板破碎狀態實驗研究[J].爆炸與沖擊,2009,29(3):231-236.Chi Runqiang,Pang Baojun,He Maojian,et al.Experimental investigation for deformation and fragmentation of spheres penetrating sheets at hypervelocity[J].Explosion and Shock Waves,2009,29(3):231-236.
[3]單寶忠,郭寶平,牛憨笨.多通道門選通納秒分幅相機[J].光學精密工程,2007,15(12):1963-1968.Shan Baozhong,Guo Baoping,Niu Hanben.Multi channel nano-second framing camera with gate selection[J].Optics and Precision Engineering,2007,15(12):1963-1968.
[4]李劍,暢里華,譚顯祥.FJZ-1000型超高速轉鏡分幅相機及其應用[J].爆炸與沖擊,2005,25(6):574-576.Li Jian,Chang Lihua,Tan Xianxiang.Model 1000ultra high speed rotating mirror framing camera and applications[J].Explosion and Shock Waves,2005,25(6):574-576.
[5]李景鎮,譚顯祥,龔向東,等.超高速轉鏡分幅攝影時間信息參量測量的研究[J].光子學報,2004,33(7):854-858.Li Jingzhen,Tan Xianxiang,Gong Xiangdong,et al.Studying on time information parameters of ultra high speed framing photography with rotating mirror[J].Acta Photonica Sinica,2004,33(7):854-858.
[6]許家隆.轉鏡式高速攝影[M].北京:科學出版社,1985:287-293.Xu Jialong.Rotating high speed photography[M].Beijing:Science Press,1985:287-293.
[7]余春暉,李春波,劉春平,等.超高速攝影儀轉鏡動力學性能的研究[J].光子學報,2011,40(7):1013-1018.Yu Chunhui,Li Chunbo,Liu Chunpin,et al.Dynamic research for rotating mirror of ultra high speed camera[J].Acta Photonica Sinica,2011,40(7):1013-1018.
[8]柳森,謝愛民,黃潔,等.超高速碰撞碎片云的激光陰影照相技術[J].實驗流體力學,2005,19(2):35-39.Liu Sen,Xie Aimin,Huang Jie,et al.Laser shadowgraph for the visualization of hypervelocity impact debris cloud[J].Journal of Experiment in Fluid Mechanics,2005,19(2):35-39.
[9]柳森,謝愛民,黃潔,等.超高速碰撞碎片云的四序列激光陰影照相[J].實驗流體力學,2010,24(1):1-5.Liu Sen,Xie Aimin,Huang Jie,et al.Four sequences laser shadowgraph for the visualization of hypervelocity impact debris cloud[J].Journal of Experiment in Fluid Mechanics,2010,24(1):1-5.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32