基于ANSYS的靜電微執(zhí)行器吸合現(xiàn)象分析
2014-11-16 06:24:56鄭麗云龔友平劉彥輝
中國新技術(shù)新產(chǎn)品 2014年16期
關(guān)鍵詞:分析
鄭麗云 龔友平 劉彥輝
(杭州電子科技大學(xué)機(jī)械工程學(xué)院,浙江 杭州 310018)
隨著微機(jī)電系統(tǒng)技術(shù)(MEMS)的發(fā)展,靜電力被普遍選作為MEMS傳感器、執(zhí)行器的驅(qū)動方式,它將點(diǎn)電荷之間的電場力轉(zhuǎn)化為驅(qū)動力。通常以單端固定的橫梁作為傳感器的機(jī)械力驅(qū)動部分,在橫梁下設(shè)置有固定電極,用極板間的電場力驅(qū)動橫梁運(yùn)動。采用電壓或者電荷控制驅(qū)動器時(shí),當(dāng)結(jié)構(gòu)的可動電極運(yùn)動位移達(dá)到特定值時(shí),呈線性變化的彈性力和呈非線性的靜電力處于平衡狀態(tài),由于電場力變化的速度遠(yuǎn)大于橫梁彈性力變化的速度,當(dāng)施加電壓或電荷超過某臨界值時(shí),就會產(chǎn)生橫梁被固定電極突然吸合的現(xiàn)象。了解靜電力驅(qū)動的基本原理以及吸合現(xiàn)象的產(chǎn)生是提高靜電力驅(qū)動器件研究水平的關(guān)鍵內(nèi)容。
1 平行板電容器靜電力驅(qū)動的基本原理
1.1 靜電驅(qū)動的基本定理
由庫倫定理可知,當(dāng)點(diǎn)電荷處在真空中時(shí),相互間的電場力與其所帶電量的乘積成正比,與其之間距離的二次方成反比,作用力的方向沿著這兩個(gè)點(diǎn)電荷的
連線。同樣處于空間介質(zhì)中的兩個(gè)點(diǎn)電荷同樣適用于庫侖定律。
1.2 微開關(guān)電容器簡化模型

圖1 平行板電容模型
如圖1所示,當(dāng)給兩個(gè)平行極板形成的電容器兩端施加電壓V時(shí),電容極板間帶有極性相反的電荷量Q并由因此產(chǎn)生靜電吸引力Fe。此時(shí),電容器存儲能量為:

式中電容C為:

式中:A是兩板之間正對面積,ε是真空介電常數(shù),εr是相對介電常數(shù),d0是極板間初始距離。
由此可以得到電容器存儲能量與電容極板距離之間的關(guān)系為:

上式中,W對極板間距離d0求一階偏導(dǎo),即可得到極板之間的靜電吸引力Fe為:

從式(4)中可以看出,極板之間產(chǎn)生的靜電力與極板兩端的電壓的平方成正比,跟極板間距離的二次方成反比,產(chǎn)生的靜電吸引力隨極板間距離減小而增大。
2 靜態(tài)吸合分析
2.1 模型假設(shè)與簡化
為了分析靜態(tài)吸合現(xiàn)象,我們需要對所提出的電容模型做一定的假設(shè)和簡化:即忽略慣性阻尼等因素的影響,極板間施加電壓變化緩慢以至于可動極板在電場力、上極板回復(fù)力共同作用下在任意時(shí)刻都能夠保持在穩(wěn)定狀態(tài),可動極板的速度以及加速度都為零且期間不會存在震蕩現(xiàn)象;極板的運(yùn)動是理想化的,即為可動極板只能隨彈性梁和敏感質(zhì)量塊在固定極板的上方做垂直運(yùn)動。
2.2 微開關(guān)的靜態(tài)吸合現(xiàn)象
對于常見的MEMS加速度計(jì)系統(tǒng),靜電力驅(qū)動結(jié)構(gòu)常常是由固定極板、可動極板、彈性梁和敏感質(zhì)量塊組成。可動極板往往和彈性梁以及敏感質(zhì)量塊連接在一起,當(dāng)極板間發(fā)生靜電作用時(shí),彈性梁會產(chǎn)生彈性力來平衡靜電引力,假設(shè)極板間距縮小x,此時(shí),系統(tǒng)達(dá)到平衡,則:

將上式化簡成關(guān)于x的函數(shù)可得:

假設(shè)在施加電壓V0時(shí),系統(tǒng)達(dá)到平衡,做功為零,則由將(6)式兩端分別對x求導(dǎo)得:

最終求得平衡臨界位置xp( 0<x<d0):

該位置就是極板的吸合點(diǎn),與吸合位置對應(yīng)的電壓即為極板的吸合電壓:
由式(6)利用Matlab軟件可得到電容極板兩端施加的電壓與平衡位置的關(guān)系曲線如下圖。由圖2可知隨著施加在電容器極板兩端的電壓逐漸增大,可動極板的位移逐漸增大,系統(tǒng)此時(shí)處于穩(wěn)定平衡狀態(tài),當(dāng)平行板電容器極板兩端的電壓增大到吸合電壓時(shí),即系統(tǒng)達(dá)到臨界平衡點(diǎn),也就是圖中的曲線的最右側(cè)位置;此時(shí)系統(tǒng)也處于平衡狀態(tài),如果繼續(xù)增加電壓,系統(tǒng)就會瞬間崩塌,可動極板和固定極板將迅速吸合在一起。結(jié)合式(8)、式(9)可知為使系統(tǒng)保證平衡穩(wěn)定狀態(tài),驅(qū)動電壓不應(yīng)超過臨界電壓Vp,其對應(yīng)最大平衡點(diǎn)位置為

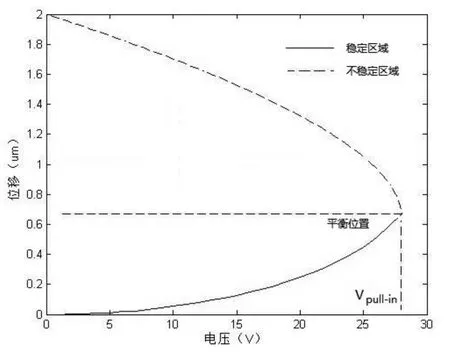
圖2 電容器極板吸合電壓與上極板位移變化曲線
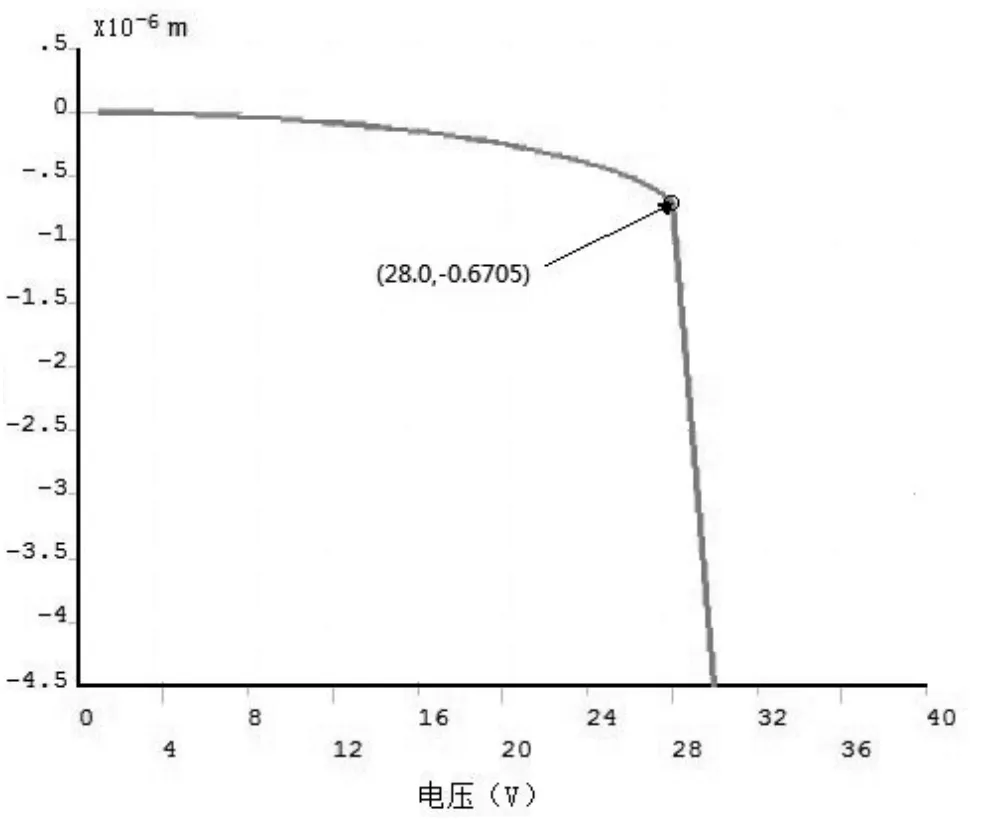
圖3 驅(qū)動電壓和懸臂梁端點(diǎn)位移關(guān)系

表1 微開關(guān)的參數(shù)模型
3 有限元仿真分析
在MEMS傳感器、執(zhí)行器設(shè)計(jì)中,通常以單端固定的橫梁作為傳感器的機(jī)械力驅(qū)動部分,在橫梁下設(shè)置有固定電極,用極板間的電場力驅(qū)動橫梁運(yùn)動。而靜電吸合現(xiàn)象是靜電力驅(qū)動微執(zhí)行器的一個(gè)重要特征,將直接影響整個(gè)微器件的性能,引起了業(yè)界廣泛關(guān)注和研究,本文將采用有限元法對其進(jìn)行耦合分析。
3.1 機(jī)電耦合理論分析
在微開光中懸臂梁在靜電力的作用下發(fā)生偏轉(zhuǎn)。當(dāng)采用有限元方法來研究這一運(yùn)動過程時(shí),涉及到電磁場和結(jié)構(gòu)場學(xué)之間較復(fù)雜的耦合分析,當(dāng)在微驅(qū)動器上施加驅(qū)動電壓后,懸臂梁受到電場力作用而向下偏轉(zhuǎn),使得懸臂梁與固定電極之間的距離減小,極板間距離的變化反過來影響電場分布,從而使得靜電力的大小隨之變化。在分析中涉及到結(jié)構(gòu)場和靜電場的耦合迭代分析,需要將前一個(gè)場的分析結(jié)果作為邊界條件和載荷傳遞到下一個(gè)場分析中,因而我們選用有限元分析中順序耦合法來進(jìn)行微驅(qū)動器的結(jié)構(gòu)場和靜電場耦合分析。
3.2 ANSYS模型建立及求解
微開關(guān)結(jié)構(gòu)模型參數(shù)如表1。
懸臂梁建模選用SOLID45單元,靜電場建模選用TRANSl26單元,該單元支持在節(jié)點(diǎn)X、Y和Z方向上的運(yùn)動,可以聯(lián)合多個(gè)單元來表示設(shè)備的全三維平移響應(yīng)。因而可以通過一個(gè)完全表征了耦合電子機(jī)械響應(yīng)的降解單元來模擬靜電驅(qū)動結(jié)構(gòu)。典型應(yīng)用包括微加速度計(jì)、微開關(guān)和微鏡設(shè)備中。
通過采用有限元分析軟件的力-電耦合分析,對微驅(qū)動器在施加電壓條件下的運(yùn)動進(jìn)行模擬分析。圖3顯示了驅(qū)動電壓V和微開關(guān)懸臂梁邊緣點(diǎn)偏移量Y的關(guān)系。
3.3 結(jié)果分析
由圖可得,電壓從0開始,以5 V的步長線性遞增到30V,隨著驅(qū)動電壓逐漸增加,微開關(guān)懸臂梁端點(diǎn)逐漸向下運(yùn)動,當(dāng)電壓到達(dá)28V時(shí),懸臂梁端點(diǎn)被迅速吸合到固定極板上,此時(shí)懸臂梁邊緣沿Y方向位移為-0.6705 um,該點(diǎn)即為吸合現(xiàn)象發(fā)生時(shí)對應(yīng)的驅(qū)動電壓和位移。
將參數(shù)代入理論公式中,可以得到系統(tǒng)的吸合電壓為28V,對應(yīng)吸合點(diǎn)為上極板邊緣位移Y=0.6667um。由此可以得出在不考慮邊緣效應(yīng)的情況下,對于微開關(guān)中懸臂梁的吸合現(xiàn)象理論分析結(jié)果和ANSYS仿真分析結(jié)果分析基本一致。
結(jié)語
本文對平行板式靜電微執(zhí)行器的典型應(yīng)用微開關(guān)進(jìn)行理論分析,得到了描述吸合現(xiàn)象的基本方程。結(jié)合靜電力驅(qū)動膜片結(jié)構(gòu),對光開關(guān)中的懸臂梁機(jī)構(gòu),采用ANSYS仿真的方法得到了懸臂梁的末端位移曲線,并與解析法相比較取得了一致的效果,為靜電微驅(qū)動控制提供了一定的理論依據(jù)。
[1]馬海陽.光開關(guān)中靜電驅(qū)動的微懸臂梁耦合分析[J].光學(xué)儀器.2003(3):17-20.
[2]李成詩.基于ANSYS懸臂式RF MEMS開關(guān)的力學(xué)模擬和疲勞分析[J].半導(dǎo)體技術(shù).2004 (10):22-26.
[3]石文尚.考慮漏電容的平板式微執(zhí)行器Pull-in機(jī)理分析[D].南京郵電大學(xué).2011.
[4]胡雪梅.微機(jī)械電容式加速度計(jì)的系統(tǒng)分析[D].西安電子科技大學(xué).2006
[5]李成詩.基于ANSYS懸臂式RF MEMS開關(guān)的力學(xué)模擬和疲勞分析[J].半導(dǎo)體技術(shù).2004 (10):22-26.
[6]張日浩,吳永根.基于ANSYS的受變化靜電力微結(jié)構(gòu)的動態(tài)特性分析[J].機(jī)電信息.2013(3):106-108.
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06