空間站機械臂關鍵技術研究
2014-11-20 08:42:28李大明胡成威王耀兵唐自新王友漁
載人航天 2014年3期
關鍵詞:機械
李大明,饒 煒,胡成威,王耀兵,唐自新,王友漁
(中國空間技術研究院總體部,北京100094)
1 引言
空間站機械臂是我國空間站建造、運營、維修及拓展等過程中不可或缺的關鍵設備之一[1]。它涉及機、電、熱、光、控等多學科交叉耦合,高度集成且研制難度巨大[2]。與俄羅斯及美國等發達國家相比,我國在基礎學科特別是材料、元器件、加工、制造及測試等方面還存在較大差距,因此瞄準國際航天技術前沿、攻克重大關鍵技術,是我國航天事業實現跨越式發展、縮小與世界先進水平差距的必由之路。空間站機械臂的研制為我國迅速發展空間機器人技術提供了一個良好的機遇,也使我國航天科技人員面臨前所未有的巨大挑戰。
從2007年起,中國空間技術研究院總體部全面啟動了空間站機械臂的研發工作[3-5],先后研制了空間站機械臂原理樣機和工程樣機,開展了大量的技術驗證工作。目前已初步突破系統設計與分析、核心產品設計、系統仿真驗證、整臂控制、功能測試、空間環境適應性驗證等各個方面的關鍵技術。本文結合我國空間站機械臂任務要求,提出了機械臂技術解決方案,并闡述了關鍵技術攻關成果。
2 任務要求
依據我國空間站工程的建設方案,空間站機械臂在軌的主要任務包括:
1)空間站艙段轉位與輔助對接:空間站三艙基本構型采用對接和轉位的方式完成建造,實驗艙先對接于核心艙節點艙的軸向端口,然后通過機械臂實現艙段分離、轉位、再對接操作,對接于節點艙側面;
2)懸停飛行器捕獲與輔助對接:采用機械臂實現來訪飛行器捕獲,并將其轉移至空間站停泊口或對接口處,完成來訪飛行器與空間站對接;
3)支持航天員出艙活動:航天員通過腳限位器可以將自己固定于機械臂末端,在機械臂的支持下,進行大范圍轉移完成既定任務;
4)艙外各類負載搬運:通過機械臂實現不同負載的位置轉移;
5)艙外狀態檢查:利用機械臂末端可移動能力及配置的視覺系統,實現空間站定期巡檢,艙體表面圖像傳回艙內,供艙內航天員(或地面飛控人員)觀察,判斷艙壁健康狀態;
6)艙外設備安裝、更換或維修:航天員在艙內控制機械臂實現空間站平臺、載荷等大質量設備的安裝、更換或維修過程中搬運、機械對齊與連接等工作。
我國空間站需要配置核心艙機械臂和實驗艙機械臂各一套,共同完成上述任務。其中核心艙機械臂規模大且承載能力強,能夠完成大負載搬運、大范圍轉移、艙段轉位對接等類型任務;實驗艙機械臂靈活小巧,能夠完成載荷安裝等精細化操作任務[1]。
3 國內外空間站機械臂比較
最具代表性的空間站艙外機械臂是由加拿大和NASA聯合研制的艙外移動服務系統[6],主要包括一個大型遙操作臂系統(SSRMS)(長17.6 m、7個自由度)、一個特殊用途的靈巧操作臂(SPDM)(長3.5 m、15個自由度)以及移動基座。該系統初始安裝在“國際空間站”的美國艙段上[7]。
此外,在“國際空間站”還配備了兩個大型空間艙外機器人系統分布安裝在俄羅斯艙和日本艙,即歐洲航天局研制的歐洲機械臂(ERA)[8](長11.3 m,7個自由度)和日本研制的實驗艙機械臂系統(JEMRMS)[9](長9.9 m,6 個自由度,末端安裝一個2 m長的6自由度小型靈巧機械臂)。
我國空間站核心艙機械臂具有7個自由度,臂長10.2 m,當前可實現性能指標與國際先進機械臂指標對比情況如表1所示[10]。由表可知,我國空間站核心艙機械臂在各項指標對比中均與國際先進水平相當,其中承載能力、精度和速度等關鍵指標處于國際領先水平。
4 主要技術方案
如圖1所示,核心艙機械臂由天、地兩大部分組成。
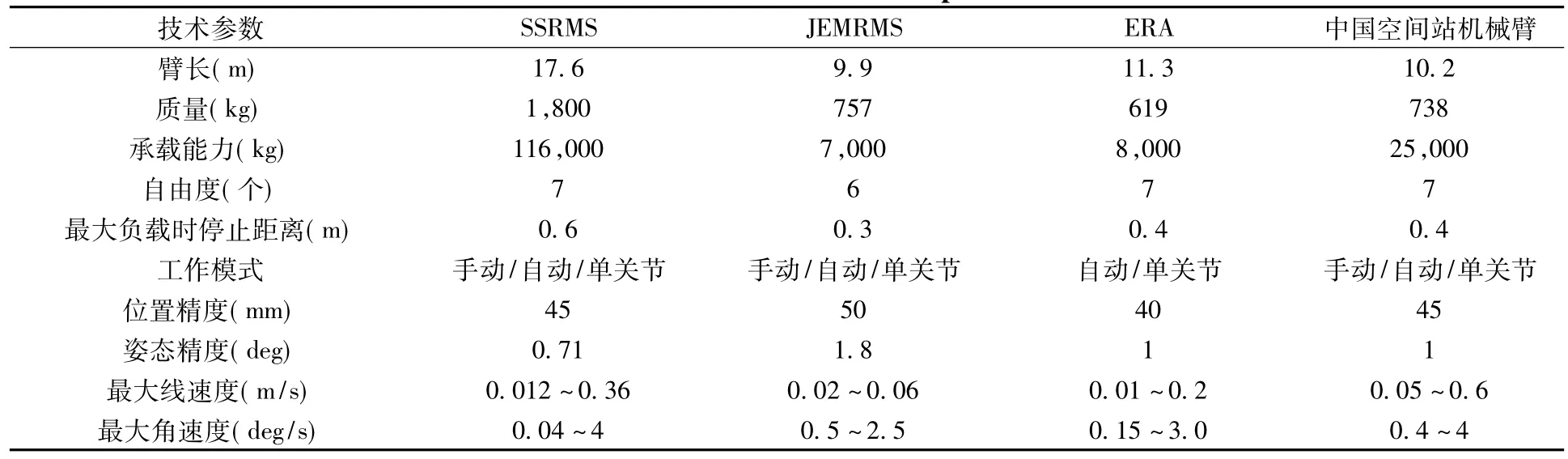
表1 國內外機械臂性能對比Table 1 Performances of manipulators
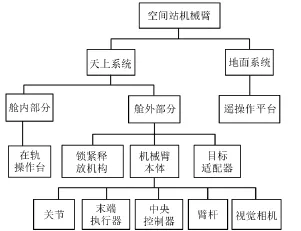
圖1 我國空間站機械臂系統構成Fig.1 Constitution of the space station manipulator of china
1)艙內部分
艙內部分由機械臂操作臺和空間站為機械臂提供的接口組成,為機械臂提供電源、數據、指令、操作控制的保障。
2)艙外部分
鎖緊釋放機構用以完成機械臂發射或軌道機動階段的鎖緊和入軌或姿態穩定后的解鎖釋放。
機械臂本體由7個關節、2個末端執行器、2個臂桿、1個中央控制器以及1套視覺相機系統組成。關節的配置采用“肩3+肘1+腕3”方案,即肩部依次設置肩回轉關節、肩偏航關節和肩俯仰關節,肘部設置肘俯仰關節,腕部依次設置腕俯仰關節、腕偏航關節和腕回轉關節。這種對稱的結構可在空間站艙體表面實現肩、腕互換的位置轉移,即“爬行”。關節是機械臂的核心部分,是機械臂實現各種運動的直接執行部件。末端執行器能夠實現對目標適配器的捕獲、鎖緊和釋放,是完成抓握目標的主要工具。核心艙機械臂配備3臺視覺相機,肩部、肘部、腕部各1臺,肩部和腕部相機可對目標實現識別和位姿測量功能,肘部相機具有視頻監視功能。臂桿是機械臂的結構部分,用來連接與支撐關節、末端執行器、中央控制器等部件。中央控制器是機械臂控制核心,依據在軌路徑規劃與算法或地面注入運動規劃實現指定運動;它還集成了以太網絡交換機,能夠對視覺相機的視頻信號進行集中管理。
目標適配器是末端執行器抓取的目標,布置在空間站艙體表面用于“爬行”,或布置在目標物體上用于抓取物體。
3)遙操作平臺
地面系統主要由遙操作平臺組成,實現天、地通信,用于機械臂在軌任務的地面規劃以及運動控制,同時具有機械臂故障檢測與在軌診斷的能力。
5 關鍵技術
結合我國空間站方案設計階段的主要工作成果,對以高精度伺服控制技術、多約束路徑規劃技術等為代表的八大類關鍵技術逐一進行描述。
5.1 高精度伺服控制技術
影響機械臂精度的主要因素包括系統誤差和隨機誤差,其中裝配間隙、控制器誤差以及環境因素等引起的隨機誤差難以消除,但是對于機械臂零部件機械加工誤差、基座裝配誤差以及負載引起的誤差等系統誤差,可以通過標定及控制補償等手段加以消除,從而實現機械臂末端高精度控制。
高精度伺服控制技術主要包括集中式和分布式兩種控制形式[2]。考慮到機械臂多關節設備離散分布且單關節功能復雜的特點,如果采用集中控制需要解決電纜布線復雜、信號相互干擾以及分時控制一致性不強等問題,因此機械臂優選采用分布式控制方式。分布式控制采用單關節集成控制器方式,伺服控制可采用位置環、速度環、電流環反饋控制,并輔以動力學前饋補償、摩擦力補償等方法。將電機的驅動測量信號的采集處理、運動控制等功能直接解決在單個關節上,通過并行處理與工作可以有效避免相互干擾。
核心艙機械臂工程樣機二維平動驗收測試結果表明,機械臂末端定位精度約為20 mm,姿態定位精度約為0.4°。依據機械臂運動學仿真分析,預示機械臂在軌三維任務工況下的末端定位精度可優于45 mm,姿態定位精度可優于1°。
5.2 多約束路徑規劃技術
核心艙機械臂在采用通用逆運動學進行仿真規劃的基礎上,針對空間站姿態擾動、艙外布局設計、空間站避碰需求等約束條件,開展了路徑規劃優化技術研究。
針對機械臂和空間站幾何形狀,將機械臂可能發生碰撞桿件以及艙體分別進行簡化處理,機械臂與空間站之間的碰撞檢測歸結為線段間距計算,以此判斷是否發生碰撞。機械臂在運動過程中,實時進行碰撞檢測,確保任務過程安全。
對于機械臂抓捕動作,采取分段路徑規劃策略,設立中間點,將中間點之后的運動設計為垂直于目標適配器錐桿的直線運動,以免同錐桿發生側向碰撞;另外,根據空間站基座和空間機械臂關節速度之間的映射關系,以初始和終止關節角度/角速度/角加速度為條件,建立空間站基座位姿擾動和關節角速度關系的多項式或目標函數,在此基礎上,應用相關算法進行最優路徑求解,實現對基座姿態擾動最小化的路徑規劃;綜合考慮機械臂任務期望目標位姿、機械臂當前構型及末端位置、機械臂所處環境等信息,采用最短距離規劃算法完成機械臂空間最短路徑選擇。以上描述的抓捕碰撞力最小、基座擾動最小、轉移時間最短的規劃方法可應用于特定任務的頂層規劃。
5.3 多柔體系統動力學建模與分析技術
空間機械臂在軌運動時,其臂桿及關節的柔性及振動對機械臂的動態特性(如定位精度、平穩性等)影響較大,甚至影響系統安全性,因此機械臂柔性動力學建模與分析技術是系統設計及在軌任務驗證的重要基礎。
針對核心艙機械臂任務特點,根據關節中電機、行星減速器等部件的工作原理建立關節動力學模型,考慮摩擦、間隙、剛度、負載變化影響等非線性因素;同時采用有限元方法建立臂桿模態模型,建立帶柔性鋼絲繩的末端執行器動力學模型,用于機械臂捕獲過程的仿真驗證。
在空間站方案設計階段,針對核心艙機械臂轉位與輔助對接兩個實現難度大的核心任務進行了重點研究。我國空間站采用了周邊式對接機構[11],這類對接機構雖在主動對接的互換性、對接后的偏離校正等方面具有一定優勢,但是這類對接機構在主動環、被動環中心存在偏差時,需要的對接力較大,這對于核心艙機械臂來說是難以做到的。核心艙機械臂采用視覺閉環方法減少對接前兩對接口中心偏差,從而大幅減小對接過程中所需要的推力;對接過程中,核心艙機械臂采用力控制方法輔助對接任務方案可行。
5.4 目標識別與測量技術
核心艙機械臂目標識別與測量依靠視覺相機系統完成。視覺相機實現視場范圍內已知尺寸、形狀、分布和數量等信息的視覺標記快速、可靠的檢測和連續跟蹤,并實時連續輸出特定觀測目標與機械臂特定組件之間高精度的相對位姿關系,即目標坐標系與組件坐標系之間的變換關系,包括旋轉矩陣和平移向量,提供機械臂控制系統或航天員做出操作判斷。在目標識別與測量方面,完成如下成果:
1)確定相機標定方案。為保證測量功能的實現并滿足測量精度的要求,需要通過標定過程獲取相機成像模型中的所有未知參數,包括表示相機內部結構的內部參數和相機空間位姿的外部參數。
2)確定目標識別技術方案。核心艙機械臂視覺相機對裝配有特定人工視覺標記的合作目標進行識別。
3)確定目標測量方案。采用雙目相機測量,根據相機模型和圖像特征的匹配結果,求解出標記在雙目視覺系統坐標系下坐標,再建立與標記在目標坐標系下坐標的一一對應關系,進而計算得到目標位姿。
5.5 核心機構部件設計技術
核心機構部件主要包括關節和末端執行器。
關節設計難度一方面是傳動及軸系結構復雜且精度要求高,需要綜合考慮布局及測量等方面的影響,另一方面還要考慮產品裝配工藝性及在軌維修性等方面的影響。最終核心艙機械臂關節采用機、電、熱高度集成的一體化設計方案,由完全備份的電機組件、減速器、雙通道旋變、軸系、控制器、電源模塊、熱控組件等幾部分組成。電機組件主要由直流無刷電機、制動器和雙通道旋變組成;減速器采用雙驅動齒輪減速和多級行星減速的傳動形式;控制器同時集成關節運動控制和熱控控制兩部分功能。整機剛度約為1×106N·m/rad,與加拿大臂同類產品相當。
核心艙機械臂具備“爬行”功能,并可與實驗艙機械臂合作,進行空間作業,這需要機械臂應具備與目標物之間高剛度連接功能,同時還能夠進行電連接。要實現空間自動電器連接,首先應保證被連接物之間的高精度對接,然后再進行電連接,并要求電連接器也應具備一定容差功能。由這些功能需求確定末端執行器由捕獲模塊、拖動模塊、四個鎖緊模塊、殼體組件、配電組件、控制器、六維力傳感器等組成,實現對安裝有目標適配器的目標物實施抓取、釋放功能。
5.6 活動部件長壽命潤滑設計
為了保持設計壽命內潤滑性能穩定,滿足工作任務要求,對活動部件的潤滑方式及材料進行充分選型:
1)在高速輕載傳動機構潤滑方面,設計采用了脂潤滑材料;
2)在低速重載機構潤滑方面,設計采用固體潤滑材料;
3)在薄壁軸承潤滑方面,針對薄壁軸承重力環境下自變形、內外圈受結構影響較大等特點,采用內外圈溝道濺射固體潤滑材料;
4)在潤滑材料空間環境適應性及防護方面,針對各種潤滑材料,特別是非密封且暴露在艙外環境的潤滑材料,進行空間環境適應性試驗,驗證了潤滑材料可滿足空間長壽命要求。
5.7 雙臂組合操作技術
核心艙機械臂和實驗艙機械臂具有串聯在一起組合工作的模式,組合操作技術主要包括組合接口設計和組合控制策略兩個方面:
1)組合接口設計。考慮到核心艙機械臂與實驗艙機械臂的直徑不同,設計了錐臺形轉接件,轉接件兩側可分別與核心艙機械臂、實驗艙機械臂進行機械連接,實現兩臂的串聯組合。在核心艙機械臂或實驗艙機械臂獨立工作時,轉接件懸掛于空間站艙體表面;另外,為了減少空間站出艙電纜的需求,核心艙機械臂設計有實驗艙機械臂所需的測控接口及信息接口,在兩臂組合時實現電氣連接。
2)組合控制方案。為提高組合臂控制的可靠性和安全性,組合臂采用分時獨立控制的方案,即核心艙機械臂運動時,實驗艙機械臂不動;核心艙機械臂到達指定位置后制動,為實驗艙機械臂提供基座,之后實驗艙機械臂進行相應精細化操作。
5.8 地面試驗驗證技術
對于核心艙機械臂這種大型空間機構系統,地面上難以采用全物理測試方式驗證其在軌實際運動功能,建議采取數字仿真、半物理試驗及物理試驗相結合方式,以期全面覆蓋機械臂在軌任務:
1)數字仿真。利用部件測試、機械臂二維測試數據校正數字機械臂模型,使得模型表現出的運動特性與物理產品相逼近;采用全數字模型實施在軌任務驗證。
2)半物理試驗。機械臂除控制系統外的部分采用數字模型,控制系統采用物理產品,兩者交互,對控制系統實施全任務的測試,確保控制系統設計正確。
3)物理試驗。采用氣浮平臺與懸吊系統相結合方式,實現機械臂二維平面內測試與驗證,獲得機械臂運動特性數據,與數字模型相互驗證。
6 結論
空間站機械臂對我國空間站建造與運營起著至關重要的作用,在空間站工程推動下,已完成空間站機械臂高精度伺服控制、多約束路徑規劃、多柔體系統動力學建模與分析、目標識別與測量、核心機構部件設計、活動部件長壽命潤滑、雙臂組合操作、地面試驗驗證共八大類關鍵技術攻關,具備了工程化實施條件。
[1]周建平.我國空間站工程總體構想[J].載人航天,2013,19(2):1-10.
[2]于登云,孫京,馬興瑞.空間機械臂技術及發展建議[J].航天器工程,2007,16(4):1-8.
[3]張凱鋒,周暉,溫慶平,等.空間站機械臂研究[J].空間科學學報,2010,30(6):612-619.
[4]于登云,潘博,孫京.空間機械臂關節動力學建模與分析的研究進展[J].航天器工程,2010,19(2):1-10.
[5]張曉東.空間柔性機械臂控制策略研究[D].北京:北京郵電大學,2008.
[6]Stieber M E,Trudel C P,Hunter D G.Robotic system for the international space station[C]//Proceedings of the 1997 IEEE International Conference on Robotics and Automation Albuquerque,New Mexico,1997:3068-3073.
[7]Gibbs Graham,Sachdev Savi.Canada and the international space station program:overview and status[J].Acta Astronautica,2002,51(1):591-600.
[8]Mozzon J M,Crausaz A,Favre E,et al.Torque Control Design of the European Robotic Arm[C]//Proceedings of the 50th European Space Conference,Tarragona,Spain,1998:335-342.
[9]Shiraki K,Ozawa K,Matsueda T,et al.JEMRMS development status[C]//Proceedings of the 44th Congress of the International Astronautical Federation,Graz,Austria,1993:1-5.
[10]Patten L,Evans L,Oshinowo L,et al.International Space Station Robotics:A Comparative Study of ERA,JEMRMS and MSS[C]//Proceedings of the 7th ESA Workshop on Advanced Space Technologies for Robotics and Automation‘ASTRA 2002’ ESTEC,Noordwijk,The Netherlands,2002:1-8.
[11]秦文波,陳萌,張崇峰,等.空間站大型機構研究綜述[J].上海航天,2010,27(4):32-42.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
