航天員與類人機器人月面聯合探測概念初步研究
2014-11-20 08:43:10李海陽黃海兵
載人航天 2014年4期
李海陽,張 波,黃海兵
(國防科技大學航天科學與工程學院,湖南 長沙,410073)
1 引言
自上世紀50年代以來,月球探測一直是人類航天活動的重點領域[1-3]。1969年,美國航天員阿姆斯特朗乘“阿波羅”飛船首次登陸月球,實現了人類歷史上的首次載人登月探測。然而,限于當時機器人技術水平,阿波羅計劃僅采用航天員與月球車聯合的方式進行探測,探測任務和范圍都很有限。美國在總結阿波羅計劃的經驗教訓時提出:能協助航天員進行精細操作等任務的機器人系統在載人登月任務中很有必要[4]。如今,機器人技術已經有了長足的進步,基于當前的發展速度,可以預見未來將具備航天員、機器人和月球車等多元素月面聯合探測的條件。
載人登月任務月面停留時間有一定的限制,阿波羅為1-4天不等,在登月期間航天員出艙執行月面時間,此外還會面臨輻射、極端溫度、月塵等可能會對其生命安全產生威脅的情況,為了能夠提高航天員在月面執行任務的效率,發送類人機器人至月面聯合航天員完成月面任務會大大提高探測效率。在月面人機聯合探測任務中,采用類人機器人與航天員搭配的模式原因在于,首先,類人機器人可以使用與航天員相同的探測工具,從而避免了為機器人準備額外工具的負擔,其次,類人機器人相對于步履機器人在月面行走更具優勢,再次,類人機器人具有類似人的外形,從形態和功能上均是人類實施登月和探測的最佳代理,而且能夠讓航天員在心理上產生被陪伴的感覺,最后,類人機器人的研究設計到多個學科,通過發送類人機器人到達月面執行任務,可以促進我國機器人相關產業的快速發展。國外對類人機器人技術已經開展了很多研究,以美國為代表,其研制的新一代機器人航天員R2(Robonaut 2),如圖1左所示,于2011年2月搭載發現號航天飛機到達國際空間站,成為人類歷史上首位上天的人形機器人[5];由波士頓動力公司研制的Petman是一種兩足步行類人機器人,如圖1右所示,其在無需外部支撐的情況下能自我保持平衡,像真人一樣四處活動,完成各種動作,即使受到沖擊也能保持直立,步行速度達到了 7.1 km/h[6]。
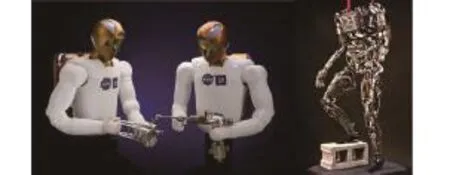
圖1 類人機器人(R2,Petman)Fig.1 Humanoid robot(R2,Petman)
國內研制類人機器人技術成果比較突出的有北京理工大學、中國科學院自動化研究所、清華大學、哈爾濱工業大學和國防科技大學等[7-8]。其中國防科技大學研制成功的第五代類人機器人KDW-5,高約160 cm,重74 kg,具有30個自由度,實現了全景視覺和雙目視覺對乒乓球的準確定位與預測,以及靈巧手臂的接球[7]。
在月球表面,引力加速度只有地球表面的1/6,航天員和類人機器人在月球表面進行探測需要面臨月球的重力環境。為了能夠在地面進行類人機器人的月面運動特性研究,需要提供重力模擬環境,現有的在地面重力環境的模擬手段主要包括利用重力加速度和利用平衡力抵消兩種方式[9],其中,利用重力加速度方式又包括落塔法和拋物飛行法,利用平衡力抵消又包括水浮法和吊絲配重法和氣浮平臺/氣浮軸承法。落塔法和拋物線飛行方法時間過短、空間有限,氣浮和水浮方法對類人機器人的研究也不適用。懸吊技術可以把類人機器人吊起來,通過拉力調節平衡掉5/6的重量,用以模擬月面重力環境,可以開展類人機器人的月面行走地面驗證實驗。
在人與機器人共同執行任務中,人與機器之間的聯合技術是保障任務高效進行的關鍵技術。人機聯合技術研究集中人與機器人在感知、決策以及執行方面的有機結合問題上,通過對人與機器人特點的分析,研究人與機器人在任務中的參與關系。文獻[10-11]研究了人機聯合技術在機器人遙操作控制領域中的應用,通過本地操作員與遠端機器人之間的配合,克服時延影響,完成操作任務;文獻[12]設計了一種無人機的觸覺共享控制系統,利用機器計算的控制力對操作員指令進行輔助,實現無人機飛行過程中的碰撞規避;文獻[13-14]研究了人機協作的車輛駕駛智能輔助控制系統;周前祥等采用實驗方法研究了最后接近段交會對接飛行器人機聯合的控制方法[15]。
本文對月面人機聯合探測技術的概念進行了研究。首先設計了月面人機聯合探測系統的結構,然后分析了可能的探測模式,并進行了探測任務規劃,最后,對月面人機聯合探測技術研究進行了總結和展望。
2 月面人機聯合探測系統結構
月面人機聯合探測系統按照其組成可分為月面活動執行子系統和月面活動支持子系統。系統組成關系如圖2所示。
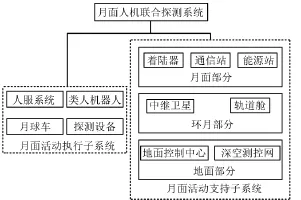
圖2 月面人機聯合探測系統組成Fig.2 Composition of lunar human - robot synergy system structure
2.1 月面活動執行子系統
月面活動執行子系統由人服系統、類人機器人、月球車和探測設備組成。各部分的主要功能定義如下:
1)人服系統。即人-登月服系統,是月面人機聯合探測的核心,具備獨立月面出艙、自行月面行走、月面采樣、月球車駕駛,類人機器人控制等主要功能。
2)類人機器人。作為航天員月面探測的先遣者和配合者,具備在控制指令下完成獨立出艙、月面行走、月面采樣、月球車駕駛、能源補充等主要功能。
3)月球車。作為拓展航天員與類人機器人活動范圍的月面交通工具,具備在操作控制下完成駛離登月艙、月面負載行駛、月面越障、自主能源補給等主要功能。
4)探測設備。執行月面探測任務所需的采樣工具包、實驗包、探測儀器和實驗儀器等。
2.2 月面活動支持子系統
月面活動支持子系統的各組成部分按空間位置可分為月面部分、環月部分和地球部分。各部分的主要功能定義如下:
1)著陸器。具有為航天員與類人機器人提供活動和安裝空間、提供出艙通道、提供信息中轉等功能,具有艙內艙外攝像功能,為登月艙和月面活動提供視頻監控。
2)能源站。為類人機器人進行充電,安裝于月球車上,具備類人機器人能源移動補給功能。
3)軌道艙。在月面人機聯合探測任務中,載人飛船具備飛船內航天員遙操作類人機器人行走和操作、類人機器人運動狀態接收與顯示、月面航天員與類人機器人信息中轉等主要功能。
4)深空測控網、通信站、中繼衛星。其主要功能是為航天員、類人機器人、月球車等月面人機聯合探測系統的組成部分之間的提供通信導航保障。
5)地面控制中心。作為載人登月任務的地面控制中心與類人機器人的地面控制指令產生場所,地面控制中心主要功能包括對月面探測任務進行監視和決策,為類人機器人地面操作人員提供遙操作終端。
月面人機聯合探測系統功能示意如圖3所示。

圖3 月面人機聯合系統功能示意Fig.3 Function of lunar human - robot synergy system
3 月面人機聯合探測模式分析
為了發揮人機聯合探測優勢,通常需要根據航天員、類人機器人與月球車各自的特點,以不同組合方式來開展人機聯合探測任務。根據探測任務中航天員、類人機器人以及月球車的不同配合方式,作者認為可將月面人機聯合探測分為類人機器人遙操作模式、二元聯合探測模式和三元聯合探測模式。
3.1 類人機器人遙操作模式
類人機器人遙操作模式與交會對接的遙操作模式類似[16],是指位于著陸器內的航天員或位于地面操作中心的航天員通過遙操作方式,控制類人機器人在月面執行探測任務。
著陸器內的遙操作控制端作為人機交互的接口由遙操作區和監視區組成[17]。遙操作區接收航天員的操作信號,轉化為控制指令后發送至類人機器人執行;監視區接收遠端機器人的反饋信息并顯示,供航天員對現場任務環境進行感知。地面操作中心的遙操作方式類似,只是需要在地面操作中心通過地月通信系統將指令和信號傳輸至月面類人機器人,通過指令與狀態的地月通信,地面遙操作類人機器人的延時效應將進一步加大[18]。
3.2 二元聯合探測模式
二元聯合探測模式是指航天員著登月服出艙,與類人機器人配合,在月面活動支持子系統的支持下,聯合開展月面探測活動。該模式主要執行短距離范圍內的月面探測任務,其主要工作流程為:
1)航天員執行過閘程序,穿著登月服,設置類人機器人狀態,攜帶應用載荷和工具等,完成月面活動的準備;
2)航天員和類人機器人出艙,到達預定地點后聯合執行操作任務;
3)航天員和類人機器人完成任務后返回,安放采集樣品,對類人機器人進行能源補充和狀態設置,之后執行返回過閘程序,進入艙內。
工作流程示意如圖4所示。

圖4 二元聯合探測模式工作流程Fig.4 Procedure of two-element joint exploration mode
3.3 三元聯合探測模式
三元聯合探測模式是指航天員著登月服出艙,與類人機器人搭載月球車,在月面活動支持子系統的支持下,聯合開展月面探測活動。該模式除具備二元探測模式所包括的能力外,還具備較遠距離范圍探測、多探測任務同時執行、以及遠程補給與救援能力,其主要工作流程為:
1)航天員執行過閘程序,穿著登月服,設置類人機器人和月球車狀態,將應用載荷和工具等安放在月球車上,完成月面活動的準備;
2)航天員駕駛月球車,攜帶類人機器人執行月面任務;駕車過程中航天員通過臍帶優先使用車上的消耗品;到達預定地點后聯合執行操作任務,或放置機器人,航天員駕車前往另一地點執行操作任務,此時機器人可通過遙操作模式實現控制;
3)航天員完成探測任務,駕車攜帶類人機器人返回,安放采集樣品,對類人機器人和月球車進行能源補充和狀態設置,之后執行返回過閘程序,進入艙內。
工作流程示意如圖5所示。
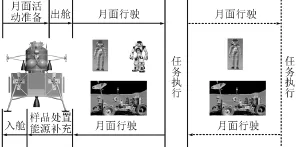
圖5 三元聯合探測模式工作流程Fig.5 Procedure of three-element joint exploration mode
4 月面人機聯合探測任務規劃
4.1 探測任務想定
參考阿波羅計劃的月面探測任務[19],典型月面活動可分為地質考察、月球樣品采集及月面科學實驗,各項活動的具體描述如下:
1)地質考察:月海、高地、峽谷和火山口等地質單元的地貌拍攝以及地質數據采集;科學探測儀器的安裝和調試:安裝激光反射器、天文望遠鏡、月震儀、磁力儀、空間環境探測包和其它探測儀器等;
2)月球樣品采集:進行巖心鉆探以及巖石、土壤采挖;
3)月面科學實驗:進行月球內部物理探測、月球環境探測等。
4.2 人機能力特性分析
采用人機聯合方式執行以上探測任務,需要根據人機各自的能力特性,形成人與機器的完美搭配。
[20],從三個層面上對人與機器的能力特性進行了比較。首先是感知層面,即系統對外界信息的獲取;第二是決策層面,基于感知得到的信息進行判斷和決策;第三是執行層面,執行決策層面所做出的決策結果。比較結果如表1所示。
從人與機器人的功能特性對比可以看出:
1)人與機器人相比在智能決策、綜合感知、意外處理等方面,具有優勢;
2)一些快速運算、復雜精密、單調重復、長期連續、重載、環境惡劣的探測任務,適合機器人完成;
3)人的優點正好是自動化控制的缺點,而自動化控制的優點又正好是人的缺點,兩者互補形成了人機聯合的基礎。
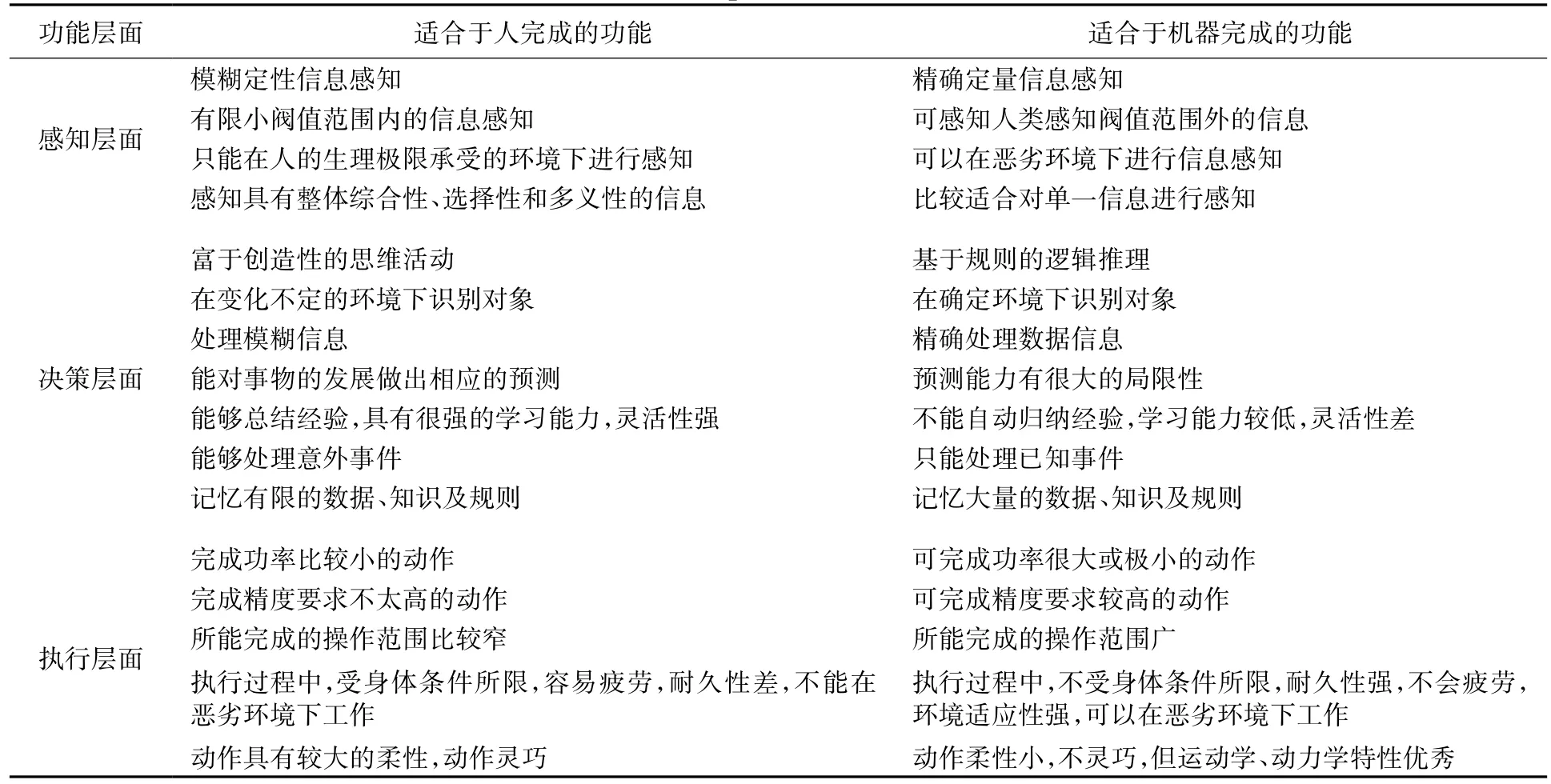
表1 人機適合完成的功能比較Table 1 Function comparison of human and machine
4.3 任務分配方案
在月面探測任務中,應根據任務的復雜程度以及航天員和類人機器人各自的優勢,采用不同的人機聯合方式,實現探測效率的最大化。根據各項具體任務中航天員和類人機器人的參與程度,本文將人機聯合方式分為“人主機輔”、“機主人輔”以及“人機協同”三種。
將4.1中各項活動進行功能分解,結合4.2中人機特性的分析,可對航天員和類人機器人適合執行的月面探測任務進行分配,如表2所示。
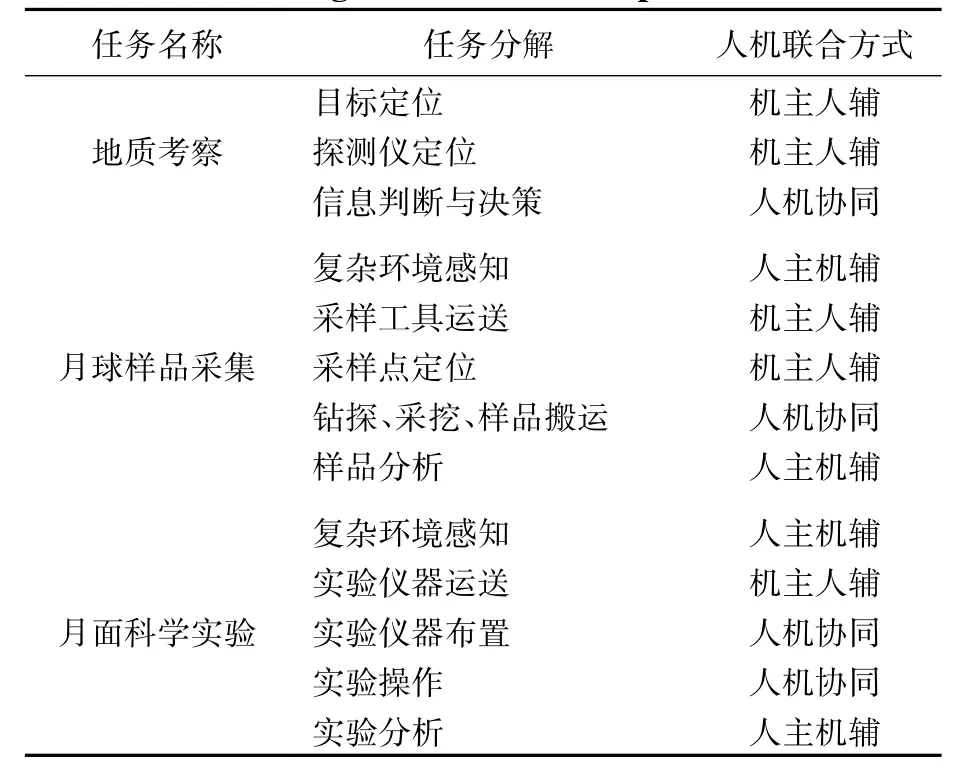
表2 月面探測任務分配Table 2 Assignment of lunar exploration task
5 展望
航天員與類人機器人月面聯合探測是實施月球探測任務的有效途徑。然而,該項技術距離工程實施還存在一定的差距,在后續研究中應著力對以下關鍵技術進行攻關:
1)類人機器人技術
類人機器人是月面人機聯合探測的直接執行單元,其主要依托技術有機械結構技術、控制技術、傳感技術、通信技術和電源技術等。其中控制技術是實現類人機器人月面活動的核心技術,包含機器人行走的路徑規劃和穩定控制。
2)人機協同操作技術
人機協同操作技術是在探測任務規劃的基礎上,根據任務內容、人機特性以及環境等因素,分階段、分自由度以及分控制權重,設計具體操作過程中,人機的協同方式。
3)遙操作控制技術
當操作員從地球或軌道艙內對月面類人機器人進行遙操作控制時,面臨的一個關鍵問題是控制回路中存在時延,時延將影響控制系統的穩定性及控制效果,因此,應研究克服時延的控制方法。
4)能源通信等支撐技術
月面航天員和類人機器人不可能單獨的完成任務,需要能源、通信等技術的支持。能源補給站主要為類人機器人和月球車進行能源補給,通信站主要為航天員、類人機器人和月球車提供通信和定位服務任務,具備與月球車、月面活動機器人之間的無線電通信保障及視頻監控傳輸與轉發功能。
5)地面仿真驗證技術
地面仿真驗證技術主要包括月面環境模擬技術、類人機器人模擬技術和遙操作控制回路模擬技術等。月面環境模擬包括月球引力場模擬和月面地形地貌模擬,類人機器人模擬技術即研制月面探測類人機器人的原理樣機,遙操作回路模擬技術主要實現遙操作控制端的模擬和時延模擬。
月面航天員與類人機器人聯合探測技術可有效保障月面探測任務的實施,目前研究還有很多技術問題亟待解決。可以預見,隨著對以上關鍵技術的不斷深入研究,月面人機聯合探測技術將會在月球探測任務中發揮重要作用。
[參考文獻]
[1]管春磊,周鵬,強靜.國外載人登月發展趨勢分析[J].國際太空,2009,15(2):22-28.
[2]龍樂豪.關于載人登月工程若干問題的思考[J].導彈與航天運載技術,2010,6:1-5.
[3]鄭偉,許厚澤,鐘敏,等.月球探測計劃研究進展[J].地球物理學進展,2012,27(6):2296-2307.
[4]Lyndon B.Apollo Program Summary Report[R].NASA report JSC-09423.1975.4.
[5]Diftler M A,Mehling J S,Abdallah M E,et al.Robonaut 2-the first humanoid robot in space[C]//Robotics and Automation(ICRA),2011 IEEE International Conference on.IEEE,2011:2178-2183.
[6]Raibert M.Dynamic legged robots for rough terrain[C]//Humanoid Robots(Humanoids),2010 10th IEEE-RAS International Conference on.IEEE,2010:1-1.
[7]李航,宋春華,羅勝彬,等.機器人的研究現狀及其發展趨勢[J].微特電機,2013,41(4):49-52.
[8]王劍.仿人機器人在線運動規劃方法研究[D].長沙:國防科學技術大學,2008.
[9]徐文福,梁斌,李成,等.空間機器人微重力模擬實驗系統研究綜述[J].機器人,2009,31(1):88-96.
[10]Boessenkool H,Abbink D A,Heemskerk C J M,et al.A task-specific analysis of the benefit of haptic shared control during telemanipulation[J].IEEE TRANSACTIONS ON HAPTICS,2013,6(1):2-12.
[11]李滋堤,孫富春,劉華平,等.基于人工勢場的空間遙操作共享控制[J].清華大學學報,2010,50(10):1728-1737.
[12]Smisek J,van Paassen M M,Mulder M,et al.Neuromuscular analysis based tuning of haptic shared control assistance for UAV collision avoidance[C]//World Haptics Conference(WHC),2013.IEEE,2013:389-394.
[13]Katzourakis D,Alirezaei M,de Winter J C F,et al.Shared control for road departure prevention[C]//Systems,Man,and Cybernetics(SMC),2011 IEEE International Conference on.IEEE,2011:1037-1043.
[14]Anderson S J,Karumanchi S B,Iagnemma K.Constraintbased planning and control for safe,semi-autonomous operation of vehicles[C]//Intelligent Vehicles Symposium(IV),2012 IEEE.IEEE,2012:383-388.
[15]周前祥,曲戰勝,王春慧,等.最后接近段交會對接飛行器人機聯合控制的仿真研究[J].系統仿真學報,2006,18(5):1379-1383.
[16]周劍勇.遙操作交會對接概念與關鍵技術研究[D].長沙:國防科學技術大學,2013.
[17]張波,李海陽,唐國金.變時延遙操作交會的Smith模糊控制[J].物理學報,2013,62(2):029601.
[18]Zhang B,Tang G,Li H,et al.Predictive control of teleoperation rendezvous with large time delay[C]//Control and Automation(ICCA),2013 10th IEEE International Conference on.IEEE,2013:896-901.
[19]李成智,李建華.阿波羅登月計劃研究[M].北京:北京航空航天大學出版社,2010:275-298.
[20]陳鷹,楊燦軍.人機智能系統理論與方法[M].杭州:浙江大學出版社,2006:90-96.
